利用视觉信息辅助GNSS 紧耦合定位方法
2020-08-25树玉泉付文举马爱龙陈锐志蔚保国
王 磊,树玉泉,付文举 ,马爱龙,陈锐志,蔚保国
(1. 卫星导航系统与装备技术国家重点实验室,石家庄 050081;2. 武汉大学 测绘遥感信息工程国家重点实验室,武汉 430079)
0 引言
全球卫星导航系统(global navigation satellite system, GNSS)的脆弱性是其服务性能的短板之一,在复杂地理和电磁环境条件下,GNSS 信号受到遮挡或者电磁干扰,往往无法正常地提供导航定位服务。另一方面,随着电子战、导航战等电子对抗形式的出现,仅依赖卫星导航定位技术获得位置的可靠性逐渐降低,近年来开展GNSS 干扰和GNSS 欺骗的事件时有发生[1-3]。未来的弹性定位、导航、授时(positioning, navigation and time, PNT)框架就是要集成多源异构的多种导航源实现弹性的、坚韧的导航定位服务[4]。而可信PNT,则要求利用多源融合的方法达到导航定位服务高可用的状态[5]。为了提升GNSS 在复杂和受限环境下的定位性能,本文提出1 种将摄影测量技术和卫星导航技术进行融合的方法,提升导航定位服务在复杂场景下的可用性。
利用影像进行定位的方法,已广泛地应用到室内场景的导航定位中,例如机器人定位、视觉即时定位与地图构建(simultaneous localization and mapping, SLAM)等[6],在室外也主要用于视觉里程计(visual odometer, VO)等近距离定位场景[7]。受到相机分辨率限制,如果物方目标与相机距离变远,会导致定位精度显著下降,因此在室外和大范围场景下,一般不直接使用视觉信息进行绝对定位[8]。视觉定位手段与GNSS 定位技术的融合方法主要分为松耦合和紧耦合2 种。松耦合的方式是2 种定位手段分别提供定位结果,然后利用因子图等方法对多源定位结果进行融合[9]。而目前紧耦合的方式又分为2 种[10]:①利用对天的相机实时获取信号遮挡信息,然后辅助GNSS 拒绝接收到的衍射和绕射信号,降低非视距信号(none line-of-sight, NLOS)带来的误差,从而提升GNSS 在城市峡谷等区域的定位精度[11];②将GNSS 信号与视觉里程计等传感器融合,利用视觉里程计提供的相对位置变化信息,对GNSS 轨迹进行约束来提升定位精度[12]。本文提出1 种观测值域的紧耦合定位方法,即利用相片与物方平面之间的相似关系,计算相机到物方特征点的距离,再与GNSS 测距信号联合定位解算。
1 紧耦合组合定位原理
在遮挡或者复杂环境条件下,单独使用卫星导航技术不足以直接定位,此时可通过摄影测量的方式增加观测值,实现协同定位。具体的思路是利用摄影测量的原理,确定用户终端到相片上若干标志物之间的距离,再联合卫星测距和摄影测量测距的方式求解用户终端的位置,其基本原理如图1 所示。在 GNSS 无法单独提供定位解的时候,利用影像提取若干测距信号,进行联合定位解算。

图1 卫星导航与摄影测量紧耦合定位技术原理
目前已有 GNSS 和伪卫星等地基增强手段融合定位的先例。对于视觉而言,可以将相片上的特征点当做“视觉基站”。如果这些特征点在世界坐标系下的 3 维坐标已知,则可通过测量相片来确定用户到目标的距离,此时相机也变成了 1 种测距设备。如果被摄目标在世界坐标系下的坐标已知,并且可以测量被摄目标到用户的距离,那么被摄目标相当于1 个基站或者伪卫星,称作“视觉基站”。联合处理GNSS 信号和视觉基站的信号,可以实现信号层面的联合定位,称为卫星导航与摄影测量的紧耦合定位(如图2 所示)。紧耦合定位的过程主要分 2 个步骤,即从视觉影像中提取距离观测值,再与GNSS 联合定位解算。

图2 利用摄影测量的方法测量终端到“视觉基站”的方法示意
1.1 利用视觉影像提取距离观测值
根据影像覆盖范围内一定数量分布合理的像控点(已知其像点和地面点的坐标),利用共线条件方程求解像片外方位元素θ=[XS, YS, ZS,ψ,ω,κ]T。在求解外方位元素前,需要利用格网标志点对相机的内方位元素进行精确标定,以削弱镜头畸变带来的影响[13]。在后续论述中,假设相机已经事先完成了内参数的标定并对镜头畸变进行了合理的校准。
如图2 所示,物方已知点A和相机投影中心S在地面摄影测量坐标系中的坐标分别是(XA ,YA,ZA)、(XS,YS,ZS);物方已知点A在相片上对应的点a在像空间坐标系中的坐标是(x,y,-f)。由共线条件方程知,物方已知点的观测方程[14]可表示为
为保证参数估计的精度和可靠性,需要测量4 个或更多像控点和对应像点的坐标,采用最小二乘平差方法解算。此时像点坐标(x,y)作为观测值,可列出每个像点的误差方程为
利用最小二乘法求解相机外方位元素为

外方位元素的求解精度与物方距离远近有关。在相机分辨率一定的条件下,相机和物方距离越远,物方分辨率越低,像点观测精度越低,外方位元素求解精度越低,位置求解精度越差。此时可利用求解的相机近似坐标和相片目标点的准确坐标计算相机至目标点的距离,这样就利用相片形成了若干个到目标点的距离观测值。利用相片提取距离观测值的流程如图3 所示。在求解相机外方位元素后,即可反算若干个相机到物方特征点之间的近似距离。该距离观测值的方差可根据观测距离远近建立经验模型确定。

图3 利用相机求解相机到目标点距离算法流程
1.2 紧耦合定位方法
在可见卫星数不足的条件下,单独使用GNSS无法实现定位,此时可联合相机计算得到的距离观测值和 GNSS 观测信号求解用户坐标。联合影像与GNSS 定位求解过程为

式中:PG和PC分别为GNSS 测量的伪距和相机测量的距离;ρ为卫星或者视觉基站和接收机之间的几何距离(以米为单位);δorb为 GNSS 卫星轨道误差;c为真空中的光速;分别为卫星和接收机的时钟误差;Ii和δtrop分别为第i个频率信号的电离层延迟和对流层延迟; ∊Pi和 ∊C分别为GNSS 伪距测量误差和相机测距误差。
GNSS 信号受到多种误差源的影响,但其测距精度与用户位置基本无关。相机通过视觉测距的方法得到的距离观测值,基本不受其他误差的影响,但其观测精度与物方距离有关,距离越远,测距精度越差。
对GNSS 信号而言,采用标准定位方法时,即可忽略轨道误差;卫星钟差通过广播星历修正;电离层、对流层误差均利用经验模型修正;用户坐标和接收机钟差利用参数估计。通过这种方法,可以获得米级的GNSS 定位精度。
相机距离观测值仅和用户坐标有关,无需估计钟差参数,将几何距离ρ按泰勒级数展开,可得
式中:ρ0为用户接收机到卫星或视觉基站的近似几何距离;ε为非线性误差;为第i个卫星或视觉基站的坐标;(dx,dy,dz)为用户接收机坐标的增量。忽略式(6)的非线性误差项后可得
式中E(·)为数学期望运算符。利用泰勒级数线性化后,GNSS 观测信号和相机观测数据紧耦合的联合定位问题可近似地转化为 1 个线性问题,该线性系统为


式中:前m个观测值为 GNSS 距离观测值;后n个观测值为相机距离观测值。
对应求解的4 个参数分别为用户3 维坐标和GNSS 接收机钟差。此方程的最小二乘解为

2 实验与结果分析
为验证上述方法的正确性,进行了仿真计算。仿真计算的场景如图4 所示。仿真计算使用了3 颗可见的GNSS 卫星,联合1 张包含4 个特征点的影像。

图4 仿真计算场景示意
仿真过程中,相机焦距设为100 mm,相机内参数经过预先标定。为了研究物方距离对定位的影响,采用1 张真实照片,计算其外方位元素后固定相机位置,根据需求变换物方距离,解算出仿真的物方坐标。利用仿真的物方坐标研究物方坐标远近对其定位精度的影响。进一步仿真了3 颗可见的 GNSS 卫星和对应的伪距观测值。GNSS 伪距观测值的精度为0.3 m,其他误差在仿真过程中忽略不计。笔者比较了不同物方距离条件下,联合GNSS 信号和相机测距信号求解坐标的精度,如图5 所示。
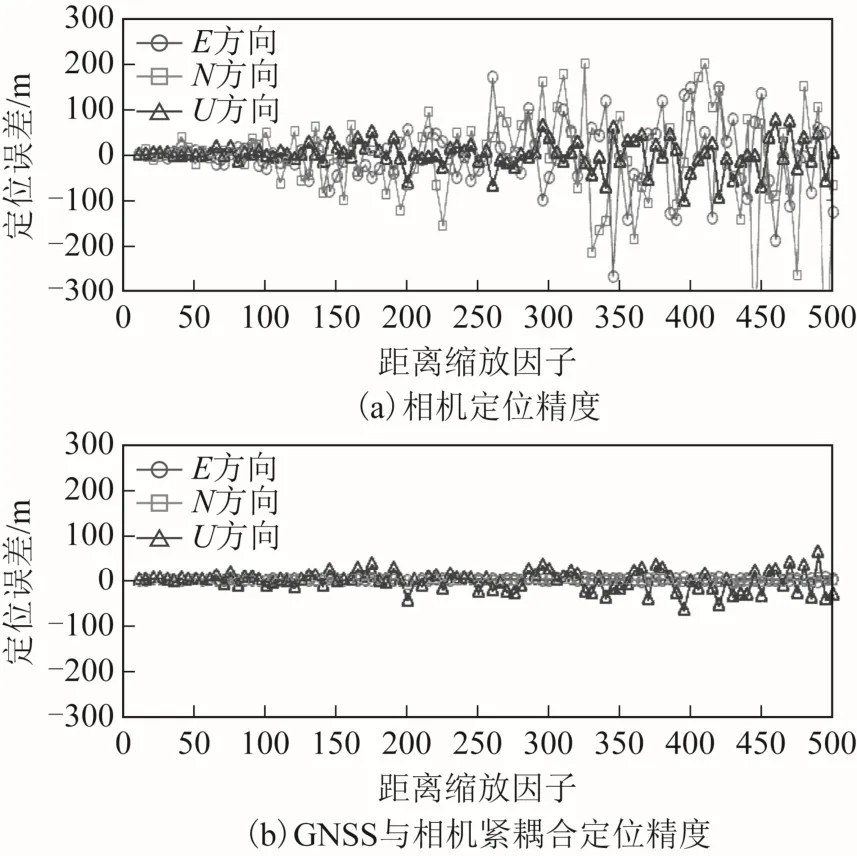
图5 不同物方距离条件下定位精度比较
图5 显示利用GNSS 与相机测距信号能够显著提高定位精度。为了量化定位精度,笔者对仿真采用的近100 个算例的定位精度进行了统计,其均方根误差(root mean squares, RMS)如表1 所示。
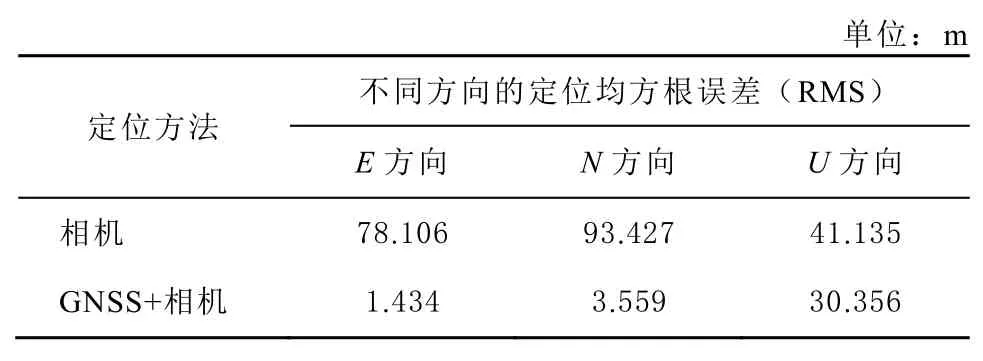
表1 相机定位与GNSS+相机紧耦合定位精度对比
表1 表明:在仿真的条件下,使用单GNSS无法定位,但与相机组合后,可使东西(E)和南北(N)方向平均定位精度从80~90 m 提升至1~4 m;高程(U)方向提升没有平面明显,也可将平均定位精度从41 m 精度提升至30 m 左右。
3 结束语
本文提出了 1 种视觉和 GNSS 紧耦合的定位技术,可提升 GNSS 在复杂场景下定位服务的可用性和抗干扰性。该方法的思路是利用相方坐标和物方坐标之间的相似关系,利用若干物方已知点求解相机的近似坐标,再反算相机到已知点之间的距离。受到相机分辨率的限制,在室外场景进行远距离定位时,视觉定位精度不高。利用影像反算得到的距离观测值,联合少量的 GNSS 距离观测值进行定位:一方面,视觉与GNSS 紧耦合定位的方式可以提升视觉定位的精度;另一方面,利用影像获取的距离观测值可以作为 GNSS 测距信号的补充,在GNSS 单独无法定位时,联合影像测距的方式即可实现用户定位,提升了导航定位服务的可用性。仿真计算结果表明,联合GNSS 测距信号与相机紧耦合定位,能够有效地提升相机远距离定位的精度,同时在 GNSS 系统可见卫星数不满足定位条件时,仍可提供有效的定位结果。同时,仿真计算结果也验证了本文所述方法原理上的可行性。在城市峡谷等区域,目前单独依靠GNSS 技术无法提供连续可靠的定位结果,但如果利用 3 维实景城市模型辅助,提供物方特征点坐标,再利用本文所述的方法,则有望提升卫星导航定位服务的可用性。
