一种基于近景摄影测量的隧道维护装置导航方法
2020-08-25王佩贤金泽林张恒璟兰文琦崔东东杨雄丹
王佩贤,金泽林,张恒璟,2,兰文琦,崔东东,2,杨雄丹
(1. 辽宁工程技术大学 测绘与地理科学学院,辽宁 阜新 123000;2. 中国测绘科学研究院,北京 100830)
0 引言
近景摄影测量具有非接触式测量、方便携带、设站灵活、能在复杂环境下工作及测量精度高等特点,在实际工程中得到了广泛的应用。文献[1]将布设好编码点的金属架作为控制装置,利用全站仪对金属架上的编码点实施高精度标定,现场布设像控点,采用数码相机,通过近景工业摄影测量技术进行隧道的变形监测。验证了数字近景工业摄影测量技术在解决隧道结构的变形测量上的可行性与精准度。文献[2]通过确定各种拍摄距离下控制点的最佳尺寸,以及通过对控制点网型的试验得到了控制网的布网原则,最终将近景摄影测量的方法应用到基坑的变形监测中。文献[3]为解决目前煤矿巷道、隧道以及立井等地下狭窄范围内各种因素导致的测量难已完成的问题,采用数字近景工业摄影测量方法,通过改变相片数量、摄影测量靶标位置以及拍摄网形,对比精度分析结论,为地下狭长空间内的测量工程提供参考。
上海硬 X 射线自由电子激光装置[4-6]总长约3 000 m,主体装置位于地下30 m 深的隧道和竖井中,在运行时具有较强辐射,需要实时提供隧道维护装置的导航位置信息以进行固放功率源破损模块的自动化更换。因隧道内环境复杂,前后无法通视及信号微弱等问题,传统测量方法无法获取准确的位置信息。为此提出1 种基于近景摄影测量技术的隧道维护装置导航方法,通过对单相机摄影测量系统进行改进,加密摄影测量控制网,在加密控制网的基础上,进行后方交会解算隧道维护装置导航位置信息,为维护仪器在隧道内实现高精度、高效率、自动化工作提供基础位置信息。
1 单相机摄影测量系统
单相机摄影测量系统是在被测物周围布设合理的编码标志后,根据工业相机在不同位置与方向对被测物拍摄2 幅以上的影像,照片在摄影测量软件中经过图像扫描后,因编码点设计的特殊性,在摄影测量处理软件中能够快速被识别和定位,同时通过编码点实现影像间的拼接,再通过三角交会和光束法平差后得到待测物体的 3 维坐标[7]。
单相机摄影测量系统由测量标志、基准尺、高精度单相机、摄影测量系统数据处理软件 4 个部分构成。
1.1 测量标志
编码标志的主要作用是通过编码点实现所有影像的拼接,同时拼接影像内所有测量点,获取测量点在像空间坐标系下的3 维坐标,所以需要在现场布设合理的编码标志。本项目最长测量范围达 1.4 km,共需两千多个具有独立身份(identity, ID)的测量标志点。目前采用8 点编码标志进行编码,只能形成 500 个不同的排列组合,即500 种不同编码标志。8 点编码标志如图1(a)所示。为了适应本项目应用需求,重新设计10 点的编码标志,可形成百万量级编码标志点,如图1(b)所示。

图1 近景摄影测量标志
相机拍摄时,合适的光线入射角为 0°~60°。上海硬 X 射线自由电子激光装置项目的隧道最长为1.4 km,直径约为7 m,它是1 个狭长的测量区域,这种测量环境使得相机在拍摄过程中,不能始终保证入射光线有较好的入射角。为克服这一缺点,设计出了多面体编码标志:这样既保证了每个测量标志具有独立的 ID,又保证了有足够的加密控制点;相机在任何角度对测量标志进行拍摄时,均有光线入射以保证获取照片的成像质量。
测量标志点的布设方案为:每隔2~2.5 m 布设五面体摄影测量编码标志的控制点;4~5 m 布设一体化立体摄影测量标志,一体化立体摄影测量标志包含摄影测量靶球。用激光跟踪仪通过对靶球进行测量,将其测量结果作为摄影测量靶球的已知值。
一体化立体摄影测量标志为摄影测量系统和激光跟踪仪共同使用,五面体测量标志为摄影测量系统所用。2 种多面体编码标志如图 2(a)和图2(b)所示。
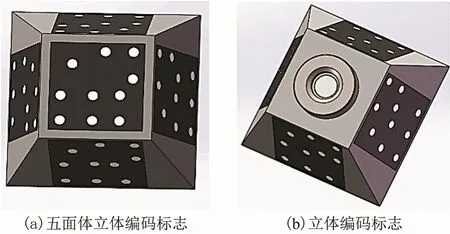
图2 近景摄影测量编码标志
摄影测量控制网加密过程中,需要激光跟踪仪提供初始点位坐标,同时激光跟踪仪和摄影测量系统均能准确识别出摄影测量靶球,因此在隧道中布设摄影测量控制点时,可以采用一体化立体摄影测量标志来满足该测量的需求。
1.2 基准尺
精度高且稳定的基准尺可为摄影测量提供高精度的长度基准;摄影测量系统具有可在非常规环境下工作的优势,所使用的基准尺由特定材料制成。通常情况下,采用因瓦合金制作成基准尺,因瓦钢基准尺在温度和湿度不稳定情况下,可保持基准尺精度变化极小,热膨胀率一般为 2×10-6/℃,可以在为标定测量时提供稳定且高精度的长度基准。考虑到隧道内环境复杂,放置的基准尺可能会产生偏移,进而导致测量误差的出现;所以本次测量采用激光跟踪仪对摄影测测量靶球进行测量,将测量所得2 个靶球点之间的距离代替基准尺。测量区域内每4~5 m 有2 个一体化立体测量标志,所以控制测量点较多,这样既可以为摄影测量控制网提供稳定的长度标准,也便于不同摄站坐标系的统一。
(2)优化业务流程,促进财务与业务系统的深度融合。优化财务业务流程,将财务信息处理嵌入到高校其他业务处理过程中。在科研立项、资产购置等业务活动发生过程中,通过财务数据的嵌入和提取,使财务系统能够按照一定的信息处理规则生成并集成信息,同步完成后续的审核、入账等财务相关业务。通过业务流程、财务处理流程、管理流程的紧密合作,促进高校信息系统的资源共享,优化业务处理流程,减少审批手续环节,减轻财务工作量,同时实现会计的事中控制,提高预防风险的能力。
1.3 高精度工业测量相机
高精度工业测量相机主要由工业相机和主动照明光源(闪光灯)组成,工作人员手持相机,根据现场环境编码点布设情况,获取被测物不同方向和位置的影像,经由摄影测量处理软件对影像进行自动处理后,获取被测物相关信息。本文所使用的高精度相机参数如表1 所示。

表1 高精度相机参数
1.4 摄影测量处理软件
摄影测量处理软件采用自主研发的IDPMS 数字摄影测量软件,通过对测量中获取的照片进行扫描、标志识别和定位、像点匹配、图像拼接、三角交会和光束平差后等步骤,可以得到摄影测量坐标系下编码标志点的三维坐标。
2 隧道摄影测量控制网加密
考虑到本项目中控制点数目较少,为适应全向轮移动平台的导航需要,结合隧道内的实际情况,必须对摄影测量控制网进行加密以提高摄影测量精度。加密控制网的精度也是检验控制网的重要指标。
2.1 控制网布设和测量
控制网布设(如图3(a)所示),控制网布设完成之后即可进行测量,其测量步骤为:①采用激光跟踪仪对一体化立体测量目标上摄影测量靶球进行测量,获取靶球点在激光跟踪仪坐标系下的3 维坐标;②采用摄影测量系统对一体化立体测量标志进行测量,获取隧道布设的控制网点的 3 维坐标。摄影测量靶球经过激光跟踪仪和单相机拍摄后,可将靶球作为公共点,通过坐标转换,将隧道中布设的所有控制网点转换到激光跟踪仪坐标系下,完成隧道内摄影测量控制网的加密(如图 3(b)所示)。

图3 控制网布设及测量
2.2 控制网测量精度
对摄影测量靶球进行测量后,应用光束法平差模型[8]获得像点残差。将摄影测量获得的靶球点位3 维坐标与激光跟踪仪测得的靶球点位3 维坐标进行对比,以反映本次测量的整体质量,结果如表2所示。其中dX、dY、dZ为点坐标差值,用均方根(root mean square,RMS)来评定控制网精度。
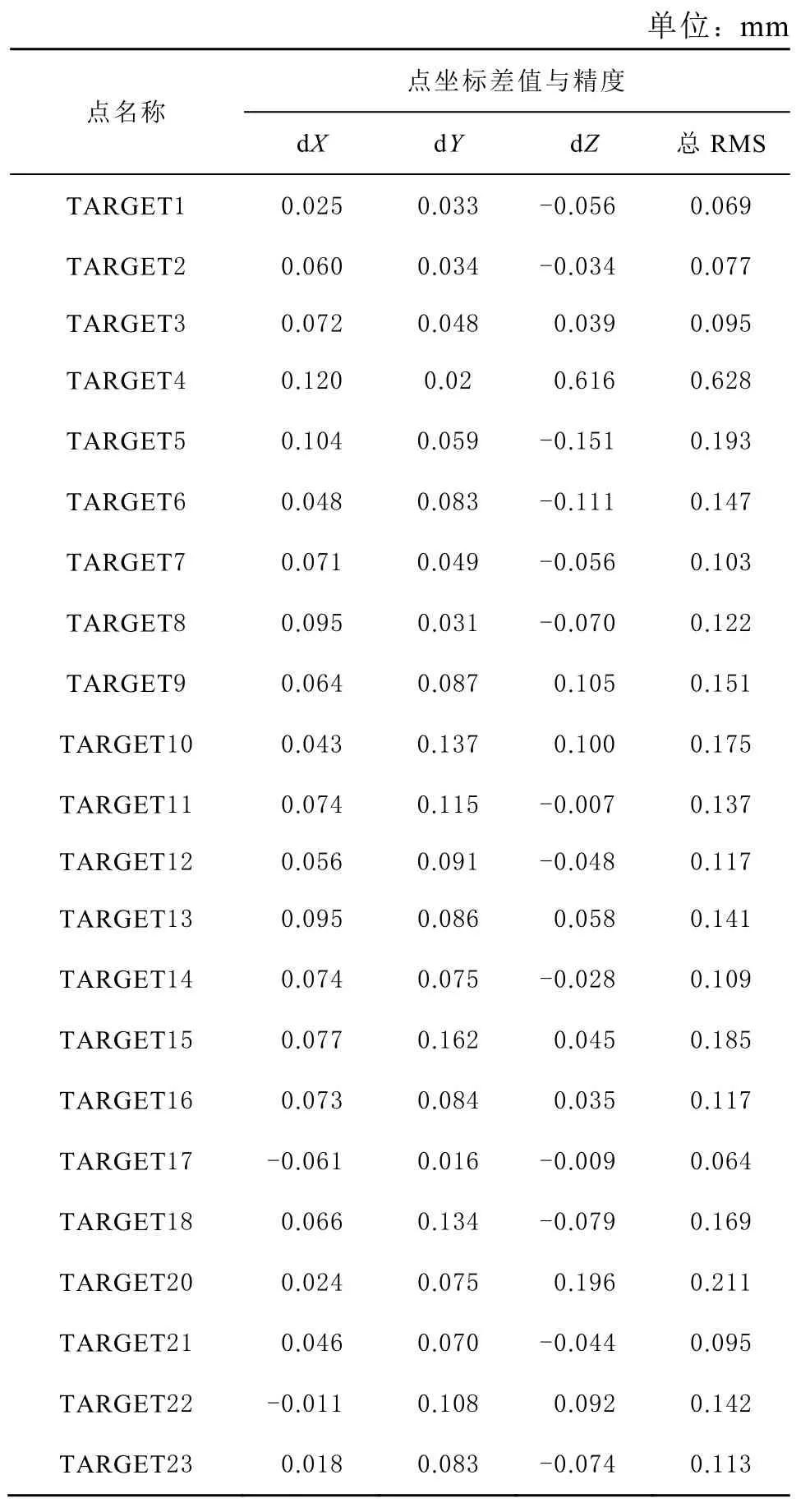
表2 相机内参标定验证结果
3 隧道维护装置导航位置和精度计算
导航位置测量时,相机控制网布设在宽度为200 mm 的狭长区域内,2 m 左右布设2 个立体摄影测量标志。全向轮移动车上安装有导航测量双相机,相机对控制网上的标志进行测量,采用后方交会原理,实现全向轮移动车的定位。导航测量相机的相机分辨率为 4 112×3 008 个像素,像元大小为5.5 μm,相机焦距为8 mm。单台相机的测量范围为 5.5 m×5.5 μm、视场角约为 70°,2 台相机夹角为60°,根据三角函数可知,2 台相机共能观测到8~10 个立体摄影测量标志。通过后方交会测量,可解算出相机在隧道中的位置。
选择 4 点后方交会方法进行导航测量精度评定[9],其计算公式为
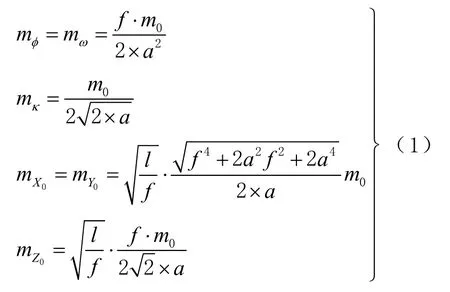
式中:m0为测量中误差(像素识别误差);f为相机焦距;a为目标成像尺寸的 1/2;l为测量距离;及mκ分别为旋转后φ、ω及κ方向上的测量中误差;分别为X、Y及Z方向的测量中误差。
在实验室环境下,标志中心提取精度可以达到1/50 个像素,工程环境下,一般按照1/20 个像素计算,则测量中误差m0=0.000 275 mm,f=8 mm;按照 1 个相机拍摄 4 m 范围内 6 个测量标志点计算,a=9 mm,测量距离按照测量光线的最大斜距4.5 m 计算。将以上参数带入精度评定公式中,可得:
4 实验与结果分析
进行本次测量项目之前,运用本文的方法进行了验证试验,即采用导航相机,对某地下隧道近60 m 的控制场进行测量,通过实验模拟本次项目所需的精度要求。在实验隧道中,为符合项目实际情况,模拟隧道内的编码标志布设情况(编码点分布间隔为2~2.5 m,隧道中还有部分编码点布设在电源机柜上,相机可拍摄到的编码点较少),采用完成标定的2 台工业相机呈60°夹角,对实验隧道中的编码标志进行拍摄。将拍摄得到的影像经过IDPMS 软件进行处理,并与激光跟踪仪的测量结果进行比较。通过多次试验,证明其测量精度可达0.458 mm。
摄影测量控制网加密完成后,隧道内控制点的坐标均为已知。在维护装置接受到中控指令,需要更换损坏插件时,导航双相机通过对隧道两侧的控制点拍摄,获取其影像坐标。利用加密时已知控制点的坐标和导航相机摄获的编码点影像坐标,通过后方交会原理,可解算出相机在隧道内位置信息。本文通过多次拍摄获取重复性精度如表3 所示。由表3 可以知:X方向最大误差为0.58 mm;Y方向最大误差为0.66 mm;Z方向最大误差为0.30 mm。
由于隧道中的控制点呈狭窄的长条状分布,网型较差,根据测量经验[10-12],狭窄的长条状网型将大幅降低测量精度,结合隧道中其他不可控因素的影响,3 个方向的定位精度一般会低于实验室环境下的精度。若参与计算的点越多,后方交会的精度则越高。模拟实验和误差理论分析结果表明,控制系统的定位精度在5 mm 以内,可以为隧道维护装置提供准确导航信息。

表3 后方交会的重复性检验
5 结束语
本文针对隧道实际环境下,对单相机摄影测量系统进行了具体设计,改进了编码标志、基准尺及摄影测量处理软件,设计和改进的摄影测量系统能够满足隧道内实际测量需要。利用近景摄影测量技术对隧道内编码标志进行拍摄和解算,应用后方交会获取相机在隧道内的位置,通过理论论述和模拟实验表明,采用数字近景工业摄影测量技术的导航方法能够保证5 mm 以内的定位精度。
