CBTC系统列车混跑模式下非通信车跟踪技术研究
2020-08-03屈永正刘振玉
宋 岩,屈永正,刘振玉
(湖南中车时代通信信号有限公司 北京分公司,北京 100079)
0 引言
基于通信的列车控制 (communication based train control,CBTC) 是基于移动闭塞理论发展而来的一种列车运行控制技术,目前被广泛应用于城市轨道交通信号控制领域。根据标准IEEE 1474.1 Standard for Communications-based Train Control (CBTC)Performance and Functional Requirements,由于运营计划要求或为避免受CBTC相关设备故障影响,列车混跑模式必须作为CBTC系统正常运行模式加以考虑[1],即CBTC系统应支持其管辖范围内处于不同运行控制级别的列车混合运行。
列车跟踪功能是CBTC系统实现移动闭塞、固定闭塞与站间联锁三级异步、无扰、多车混合运营复杂协同[2]的基础。其中,对报告列车进行跟踪比较容易实现;但对于无报告列车的跟踪,无法仅依赖列车辅助定位实现,需要在此基础上辅以一系列的逻辑判断和处理策略,因此混跑跟踪是CBTC系统的难点之一[3]。
目前针对列车混跑跟踪的研究多基于调度系统 或列车混跑跟踪结果[6-8],而没有对列车混跑跟踪场景出现的原因及跟踪列车之间的相互影响进行分析。为此,本文从控制列车安全运行间隔的角度,对无法通过自主定位而获得安全包络[9]的列车的识别、跟踪管理及相关影响进行分析研究,为列车混跑跟踪功能的实现提供参考。
1 列车跟踪功能
为了实现移动闭塞下列车安全高效运行,CBTC系统需要采用不同的列车定位方式实时掌握列车的位置和类型,进而对其进行控制和防护。
1.1 列车定位方式
地面列车自动防护(automatic train protection,ATP)系统采用两种不同的方式获得列车的位置信息:
(1)利用车载ATP系统定位。其通过车载ATP系统输出的位置报告计算得到列车包络信息。由于列车自身的定位误差,地面ATP会根据车载ATP系统的输入计算列车的所有可能位置,按照列车的运行方向,列车的最大安全前端与列车最小安全后端组成了列车的安全包络。
(2)利用列车占用检测设备定位。其通过列车占用检测设备,对列车位置进行粗略定位,CBTC系统中列车占用检测设备通常采用计轴系统。
根据地面ATP系统获取列车位置的方式将列车分为通信车和非通信车两种类型。对于通信车,地面ATP系统采用第一种方式确定列车的包络,实现对通信车的跟踪管理。对于非通信车,地面ATP系统需结合两种方式判断列车的大致位置。由于第二种列车定位方式反映出的只是物理区段的一系列占用和空闲情况,不能完全确定是由于列车运行造成的,因此地面ATP系统对非通信车的跟踪管理,准确而言,是识别出可能有非通信车占用的物理区段并将其视为列车不可通行的障碍区域。本文将该障碍区域称为非通信障碍区域。
地面ATP系统需要安全、全面地管理线路上的所有列车,重点是识别出非通信车并对其进行安全处理,以确保不会对其他列车的安全运行造成不良影响。
1.2 列车筛选
列车筛选原则是:如果通信车紧邻前方存在可疑车辆,则地面ATP系统不应为其计算移动授权;如果通信车后方存在可疑车辆,则其他列车无法追踪到该车车尾。
通过列车筛选,地面ATP系统可以确定被筛选列车的前后是否存在可疑隐藏车辆。只有完成列车筛选的通信车才可能在CBTC控制级别下运行。
列车筛选分为列车头部筛选和列车尾部筛选。当系统判定列车前方无隐藏列车时,称为完成列车头部筛选;否则称为未完成列车头部筛选或丢失头部筛选。当系统判定列车后方无隐藏列车时,称为完成列车尾部筛选;否则称为未完成列车尾部筛选或丢失尾部筛选。具体列车筛选原理可以参考文献[10]。
2 非通信车跟踪
当CBTC管辖范围内出现非通信车时,需要立即识别并对其位置进行判断,进而采取措施以减缓其对相邻运行列车的影响。
2.1 非通信障碍区域及其延伸
根据1.1节的描述,非通信障碍区域是指被认为可能存在非通信车占用的物理区段,而非通信车的出现场景主要有以下两种:
(1)经过列车筛选升级为在CBTC控制级别下运行的列车,由于某种故障,地面ATP系统判断该车无法继续按照列车安全包络实现位置跟踪,则将最后时刻计算的、列车可能运行范围内覆盖的、处于占用状态的物理区段设置为非通信障碍区域。
(2)从外界进入地面ATP系统控区范围内的非通信车,将其占用的物理区段设置为非通信障碍区域。通常,地面ATP系统控区是有明确边界定义的区域;这里,外界既可能是相邻控区,也可能是非CBTC控区。
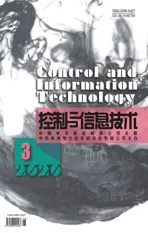
非通信障碍区域一旦产生,则对相邻的处于占用状态的物理区段具有“传染性”,这里称之为非通信障碍区域的延伸。延伸的原则是以物理区段为单位,按照线路的拓扑结构、前后两个方向进行区域的延伸扩展;停止延伸的条件是遇到处于空闲状态的物理区段或者是遇到通信车的报告位置(图1)。图1中,运行在CBTC控制级别下的列车B由于通信丢失而变为非通信车,此时其所占用的两个物理区段上产生非通信障碍区域;然后,该区域向前后两个方向进行延伸,前方遇到处于空闲状态的物理区段则停止延伸,后方遇到通信车A的报告位置则停止延伸;最终,非通信障碍区域为黑白相间矩形区域所示。
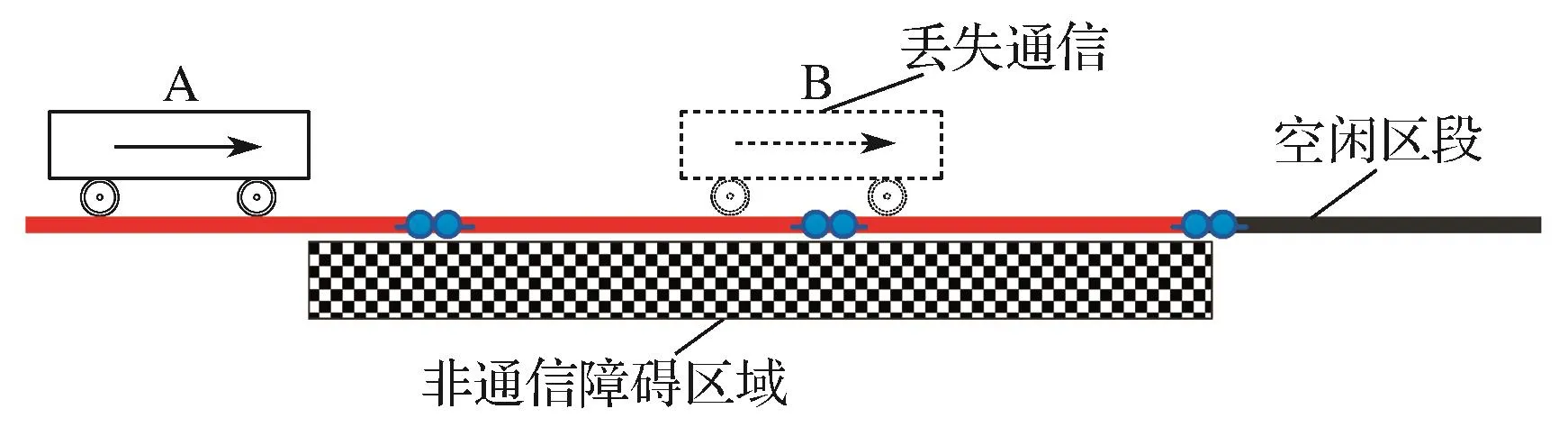
图1 非通信障碍区域的延伸原则Fig. 1 Prolongation principle of non-communication obstacle area
另外,非通信障碍区域处于道岔区段或者延伸过程中遇到道岔区段时,如果道岔失去表示且处于占用状态,则整个道岔区段上均设置为非通信障碍区域,如图2所示。图中已有非通信障碍区域处于道岔区段,若道岔出现故障而失去表示时,则在道岔另一开向上也被设置为非通信障碍区域,且继续沿该方向进行延伸。
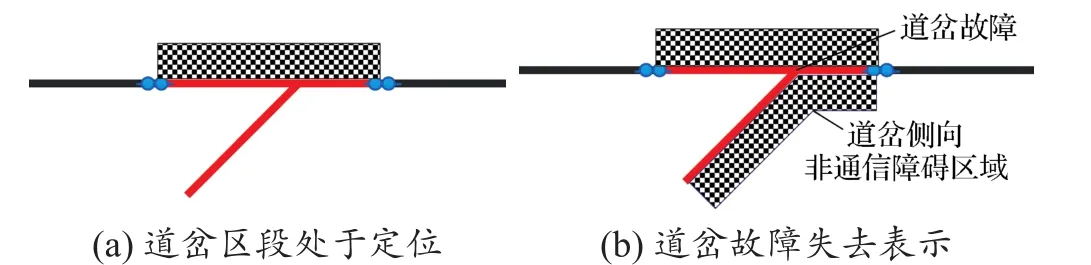
图2 道岔区段的非通信障碍区域Fig. 2 Non-communication obstacle area of point track section
2.2 非通信障碍区域的影响
非通信障碍区域出现后,若按照延伸原则进行延伸,则根据不同的运行场景,可能会对附近其他正常运行的列车造成影响。本节将对可能出现的场景进行分析,包括列车丢失头部筛选、丢失尾部筛选、移动授权回撤及边界区段。
(1)列车丢失头部筛选
两辆处于CBTC控制级别下的列车正常运行时,按照移动闭塞原理进行追踪,后车的移动授权可以延伸到前车的尾部。当两辆列车运行间隔距离较近时,即两车运行在同一物理区段或相邻物理区段时,如果前车丢失通信,将产生非通信障碍区域,由于后方区段处于占用状态,且有通信车报告其位置,该区域向后延伸至列车A(后车)车头位置停止,此时列车A由于车头前方可能隐藏可疑车辆而导致丢失头部筛选,进而降级为非CBTC控制级别的列车(图3)。
图3 丢失头部筛选Fig. 3 Head sieve losing
(2)列车丢失尾部筛选
两辆处于CBTC控制级别下的列车正常运行且间隔距离较近时,如果后车丢失通信,将产生非通信障碍区域。由于前方区段处于占用状态且有通信车报告其位置,该区域向前延伸至列车A(前车)车尾位置停止;此时列车A由于车尾后方可能隐藏可疑车辆而导致丢失尾部筛选,虽然这对自身行车不会产生影响,仍可按照既有移动授权行驶,但是由于丢失尾部筛选,即使后车恢复正常也无法追踪到列车A尾部,因此列车A在后续运行过程中需要重新进行尾部筛选。列车A此时位置报告正常,在列车A未完成尾部筛选前,非通信障碍区域会跟随列车A尾部位置进行延伸;当后方区段空闲,列车A完成尾部筛选时,之前跟随延伸的非通信障碍区域也将被消除。该过程如图4所示。
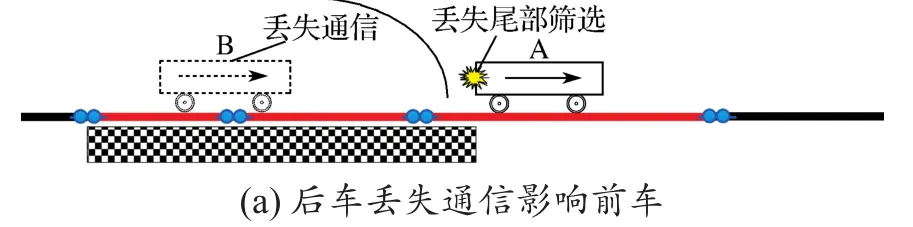

图4 丢失尾部筛选Fig. 4 Tail sieve losing
(3) 移动授权回撤
两辆处于CBTC控制级别下的列车正常运行且间隔距离较远时,如果前车丢失通信,将产生非通信障碍区域,该区域将试图向前后两个方向进行延伸。为了避免出现第1种“列车丢失头部筛选”的情况,当移动授权回撤时,应该选择空闲区段的始端而非终端作为移动授权回撤点。如果选择空闲区段的终端作为移动授权回撤点,一旦列车A驶入前方空闲区段,将立即丢失头部筛选,如图5所示。
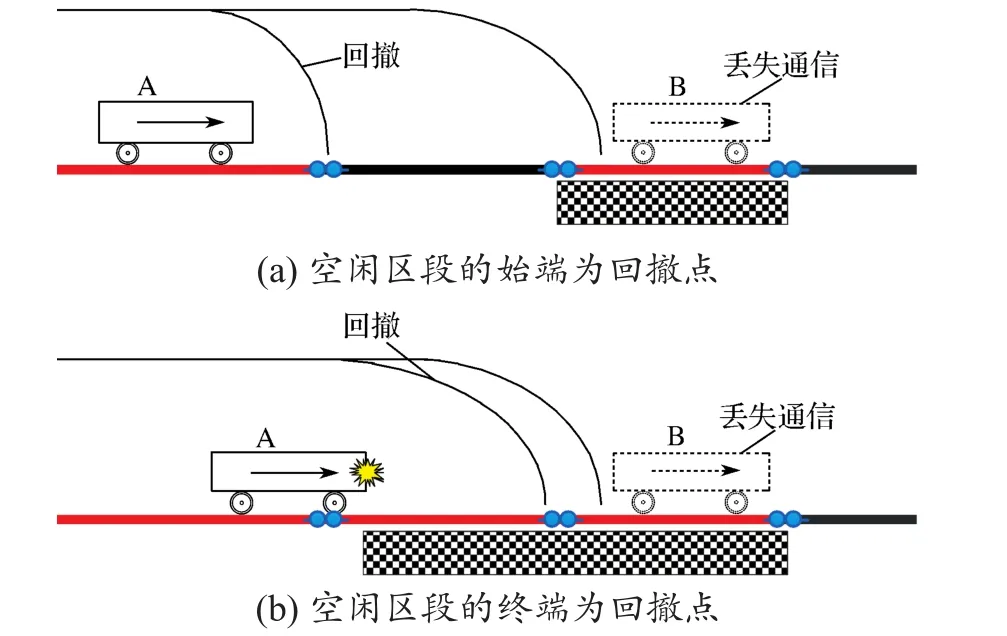
图5 移动授权回撤Fig. 5 Shortened movement authority
(4)边界区段情况
当区段边界为CBTC控区与非CBTC控区的边界且本控区内的边界区段上确定没有通信车且物理区段状态由空闲变为占用时,认为该占用是由非通信车驶入造成的,此时应将边界区段设置为非通信障碍区域,如图6所示。
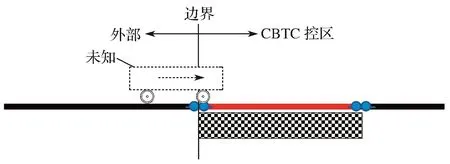
图6 CBTC控区与非CBTC控区边界Fig. 6 Border between CBTC area and Non-CBTC area
当边界为CBTC两个相邻控区边界时,非通信障碍区域的判断与图6所示情况类似,只是可以通过两个控区间的接口获取对方边界区段上的具体占用情况。例如当CBTC控区1告知CBTC控区2自身边界区段存在非通信障碍区域时,如果CBTC控区2边界区段出现占用情况,则CBTC控区2边界区段应延伸为非通信障碍区域,如图7所示。

图7 CBTC控区之间边界Fig. 7 Border between two CBTC areas
2.3 非通信障碍区域的消除
当非通信障碍区域内的物理区段状态由占用变为空闲时,意味着该物理区段上不可能存在车辆占用情况,此时应将该物理区段上的非通信障碍区域消除掉。
3 非通信障碍区域的辅助功能
在第2节的分析中,将非通信车的识别和位置跟踪问题转化成对非通信障碍区域的管理问题,包括非通信障碍区域的产生、延伸以及消除的过程。对非通信障碍区域的确定除可解决CBTC系统混跑模式下对非通信车的跟踪问题外,还可以进一步拓展,辅助完成一些相关功能的设计实现。
3.1 计轴故障判断
若非通信障碍区域内的非通信车继续向前行进,会存在两种特殊情况:(1)非通信车完整性丢失,一部分驶出原计轴区段,一部分留在原计轴区段,而原计轴区段仍处于占用状态;(2)原计轴区段故障占用,即使非通信车保持列车完整性并且实际已经驶出原计轴区段,但原计轴区段仍处于占用状态。由于地面ATP系统无法区分这两种情况,所以此时非通信障碍区域不能消除,需要借助列车清扫的方式对以上两种情况进行排查。
通过为非通信障碍区域添加一个清扫属性,将非通信障碍区域分为未清扫状态和已清扫状态。这样辅以列车清扫的逻辑处理,可以对计轴区段故障占用情况进行区分。如果计轴区段处于占用状态,但其范围内的非通信障碍区域已经过列车清扫过程变为已清扫状态,则可以判定该占用为计轴区段故障占用,如图8所示。地面ATP系统为即将通过的列车计算移动授权时,可跨过该占用区段。
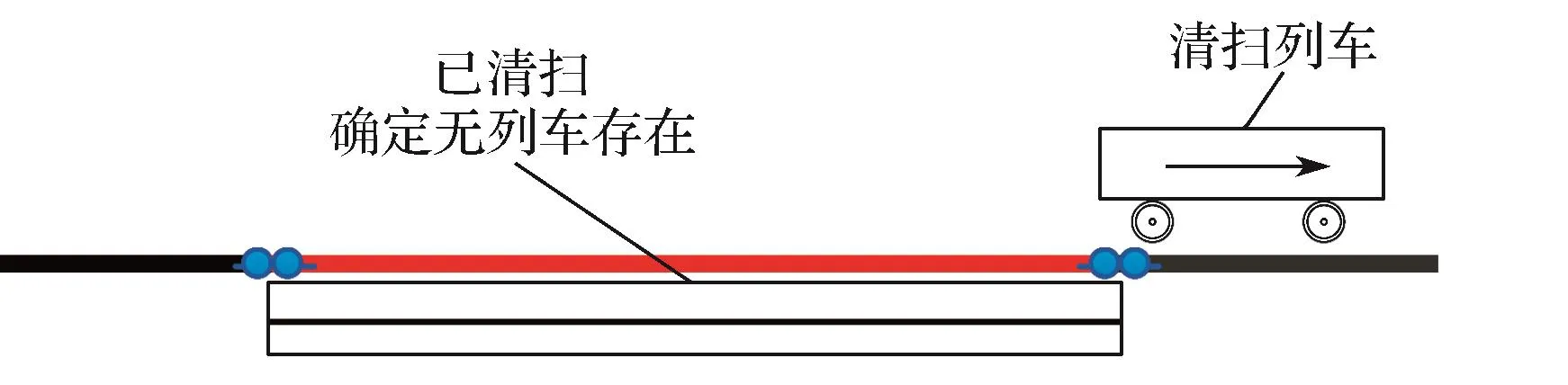
图8 列车清扫Fig. 8 Train swept
3.2 辅助列车排序
地面ATP系统对其管辖范围的列车进行动态管理,是CBTC地面系统中对列车位置信息的“总代理”。为配合联锁系统或列车自动监控(automatic train supervision,ATS)系统功能实现,需要地面ATP系统告知列车位置信息,此时列车需按照控制等级进行分类:CBTC控制等级列车和非CBTC控制等级列车。依照本文第1.2节和第2节内容分析,CBTC控制等级列车包括完成列车头部和尾部筛选的通信车和仅完成列车头部筛选的通信车;非CBTC控制等级列车包括未完成列车头部筛选的通信车和非通信车。
地面ATP系统按照以上列车的分类确定列车在线路上运行的先后关系,并将其映射到对应的物理区段上或逻辑区段上,进而按照需要告知联锁系统或ATS系统列车的位置信息。
4 结语
本文对CBTC系统混跑模式下非通信车位置跟踪问题进行了研究,使用非通信障碍区域的概念判定非通信车位置,分析了非通信车出现后对相邻运行车辆可能造成的影响,并探讨了相关功能,可为基于移动闭塞的列车混跑技术的进一步优化提供参考。
由于列车混跑模式场景复杂,在后续的研究中可以对非通信车出现场景进行更细致的分析,结合更多可用条件,例如移动授权信息,对非通信障碍区域进行更为精确的判定并缩小其影响范围,以期在保证安全的前提下提高混跑模式下列车的运行效率。