小问题2020-3
2020-07-02
《小问题》栏目欢迎来稿出题(请自拟题目或注明题目来源),题目及解答请寄《力学与实践》编辑部,采用后将致薄酬。
2020-3如图1 所示,质量为M的方块以速度U与静止的质量为m的方块相撞。然后质量为m的方块与侧壁相撞,等等。整个过程完全弹性。求证:当M/m ≫1 时,总碰撞次数N与圆周率π之间有渐近关系式

(当M/m=102k(k=1,2,···)时,计算表明,N就是π 之小数点向后移k位所得之整数。) (供稿:岳曾元)
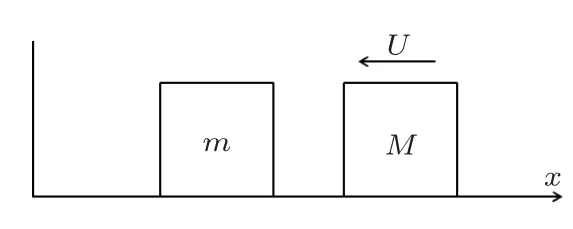
图1 初始状态
《小问题》栏目开展有奖竟答啦!2020年8月10日前将题目解答发送到lxsj@cstam.org.cn,解答正确者即可免费获赠《力学与实践》2020年第3期期刊1本 (来信时请注明邮寄地址)。期待您的参与!
* 《小问题》2020-2解答 *
问题:如图1所示,一陀螺由质量为m、半径为r的均质圆盘(厚度可不计)及通过盘心且与盘面垂直的直杆AB刚连后组成。直杆AB长为l,质量忽略不计,设l>r/2。陀螺铰接于铅垂轴Z上,当Z轴以匀角速度ω转动时,求:
(1) 陀螺的平衡位置(用AB杆与Z轴的交角θ表示),并分析其稳定性。
(2)陀螺在稳定平衡位置附近微振动的圆频率。
(选自上海交通大学吴镇编《理论力学》下册22-22题,由江苏大学张孝祖改编并提供解答)
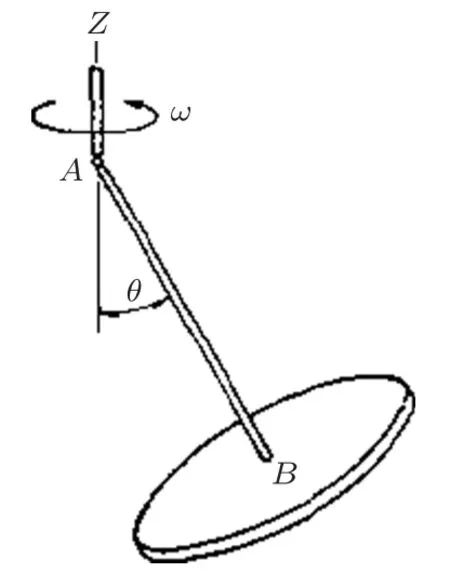
图1
解答:(1)陀螺绕A点作定点运动,建立陀螺的惯性主轴坐标系Axyz,如图2 所示,x轴垂直于杆AB与Z轴所决定的平面。陀螺对三个主轴的惯量为故有Jx=Jy >Jz。系统有1个自由度,取AB杆与Z轴夹角θ为广义坐标。
陀螺角速度矢Ω= ˙θi+ωsinθj+ωcosθk
陀螺动量矩H=Jx˙θi+Jyωsinθj+Jzωcosθk
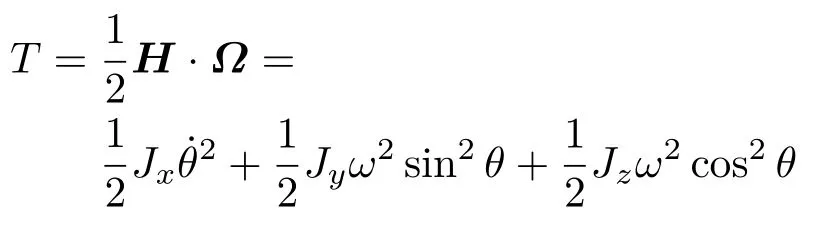
陀螺动能
以A点为零势能位形,陀螺势能
由于系统为非定常约束,陀螺动能T为的非齐次二次式

故系统广义能量守恒T2−T0+V=常量,即常量。
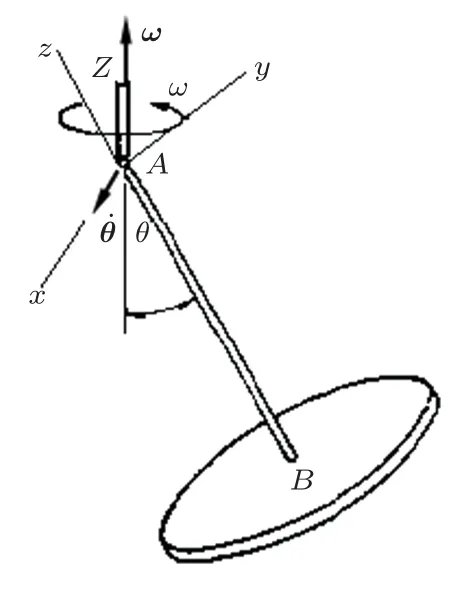
图2
其中,

U(θ)为有效势能,利用U(θ)可确定陀螺的平衡位置及其稳定性。
由U′(θ)=0,可得

于是解得陀螺的平衡位置为θ1=0,θ2=π,
(另一平衡位置=−θ3不再讨论)
由U′′(θ2) =[(−Jy+Jz)ω2−mgl]可知,因Jy >Jz,有U′′(θ2)<0,故θ2=π的平衡位置是不稳定的,物理上不可实现。
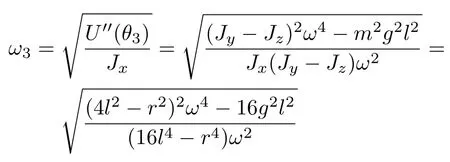
(2)用U′′(θ)可求出陀螺在稳定平衡位置附近作微振动的圆频率。