危险驾驶工况场景的复杂度评估方法研究
2020-06-29董汉,舒伟,陈超,孙灿,尤超
董 汉,舒 伟,陈 超,孙 灿,尤 超
(1.清华大学苏州汽车研究院,苏州 215200; 2.苏州清研精准汽车科技有限公司,苏州 215200;3.北汽集团越野车有限公司,北京 101300)
前言
自20世纪90年代起,高级驾驶辅助系统(advanced driving assistance system,ADAS)作为智能网联汽车的初期阶段,逐渐向技术研发阶段以至产业化车载应用阶段发展。驾驶辅助系统应用不同传感器,如摄像头、毫米波雷达和激光雷达等,提出了技术路线各异的技术解决方案,涵盖了如自适应巡航、前碰撞预警和车道偏离预警等多种功能[1-2]。
文献[3]中指出,驾驶辅助系统和智能网联汽车感知系统性能面临的主要挑战是在适应尽可能多的交通环境因素(如天气、光照、道路线形、交通工况等)的同时,保证检测性能,以及对误检率(false-positive,FP)和漏检率(false-negative,FN)的折中平衡。为对上述系统进行测试、验证和评价,广泛采用开放道路测试、封闭场地测试和实验室环境下的仿真测试等有效工具。对驾驶辅助系统和智能网联汽车的测试与验证,能在当前技术路线不同、产品形态各异的市场环境下区分不同产品的性能表现,逐步建立更加完善的市场标准与体系。
本文中提出通过数据采集车辆装载的驾驶辅助系统终端,有效在线处理并采集紧急和危险驾驶工况场景数据,并根据对数据的分析建立了包含环境、交通流、车辆相关因素的指标体系。同时,应用层次分析法(analytic hierarchy process,AHP),并基于专家对不同影响因素指标的评分结果,建立了危险工况场景评价体系和模型,以达到能对某复杂危险场景进行定量评价的结果,最终能应用于智能汽车和自动驾驶的仿真测试与评价。
1 场景工况的数据采集与处理
1.1 自然驾驶工况数据采集
作为一个工作量巨大的环节,大型实车道路试验(field operational test,FOT)[4]是驾驶辅助系统和智能网联汽车测试必要的组成部分,这对高校、研究院等科研单位的技术研发以及整车和零部件企业的产品开发都具有重要意义。在大型实车道路试验过程中,测试车辆对于自然驾驶工况数据的采集可用于交通工况与驾驶行为的分析,同时对智能网联汽车技术研发、产品验证和系统优化等也具有积极的作用。自然驾驶工况数据采集的过程中,通常情况下,必须满足以下3个条件:(1)须在数据采集车上安装高性能传感器,以采集并记录本车与交通工况的重要数据,如本车速度、前车速度、距离和加速度等;(2)测试车辆按照一般车辆的驾驶方式在随机交通流中正常行驶;(3)在足够长的一段时间周期内对自然驾驶场景数据进行采集,从而达到随机性。
密西根大学交通研究中心(the university of Michigan transportation research institute)自本世纪初主导了智能巡航控制大型实车道路试验(intelligent cruise control field operational test,ICCFOT)项目,从107名驾驶员的驾驶过程中采集自然驾驶场景数据,数据量超过 17.70万 km(11万 mile)[4]。美国国家高速交通安全管理局(national highway traffic safety administration,NHTSA)[5]和弗吉尼亚理工大学(Virginia polytechnic institute and state university)[6]也同样组织了大型实车道路试验,对100辆试验车进行自然驾驶场景研究(natural driving study,NDS)。自2008年起,在欧洲多个国家,由多个汽车企业和主流研究机构共同参与欧洲大型实车路试(European field operational test,Euro-FOT),超过1 200名志愿者驾驶员历时4年采集超过3 500万自然驾驶工况数据[7]。我国于2014~2015年开展了具有我国交通工况特色的中国大型实车道路试验(China field operational test,China FOT),32名驾驶员参与测试和数据采集,共采集18 125 km自然驾驶数据[8-9]。China FOT大型试验中包含了先行试验China-Pilot FOT,与Euro-FOT类似,通过统一在数据采集试验车辆上安装相应采集设备,包含4个摄像头(前向、后向、驾驶员状态、油门),在为期2个月的数据采集过程中获得了不同驾驶员的160个驾驶片段,共5 600 min的自然驾驶数据。
1.2 自然驾驶工况数据处理
对采集的大量自然驾驶工况场景数据的处理具有很大挑战性。目前所面临的挑战主要是“危险工况”场景较难定义[10],因而不容易从大量连续的自然驾驶工况数据中把“危险工况”提取出来。当前,应用较为广泛的方法是通过筛选采集车辆的动力学参数,如纵向和横向加速度等,从而判断车辆行驶遇到较为危险的工况[10]。朱西产等人将China-Pilot FOT试验采集的大量数据进行统计与分析,针对驾驶员的制动输入特性和转向输入特性做了研究,提出制动操作紧急程度和转向操作紧急程度的划分方法[9]。
1.3 危险驾驶工况数据采集
本文中提出了一种通过数据采集车辆装载的驾驶辅助系统终端采集危险驾驶工况数据的方式。与大型实车道路试验FOT中测试车辆连续不断地采集自然驾驶工况场景数据不同的是,本文中的测试车辆装载的驾驶辅助系统终端集成了前碰撞预警(forward collision warning,FCW)、车道偏离预警(lane departure warning,LDW)、驾驶员状态监控(driver monitoring system,DMS)和行人检测(pedestrian detection,PD)功能,在前碰撞预警、车道偏离预警、驾驶员疲劳、驾驶员注意力分散、检测到行人和车辆急减速与急转弯等终端报警情况下,将“危险工况”场景数据记录下来并回传至服务器进行存储。
所有试验车辆都统一装载了用于采集危险工况数据的驾驶辅助系统终端,包含1个前向摄像头和1个车内摄像头,记录驾驶员状态信息和道路场景信息,如图1所示。在为期2个月的数据采集中,获得了来自55个驾驶员的797个危险工况场景。根据环境、交通流和车辆相关因素对危险工况场景进行了分析和统计,结果如图2~图4所示。
1.4 危险驾驶工况数据处理

图1 危险驾驶工况数据的采集
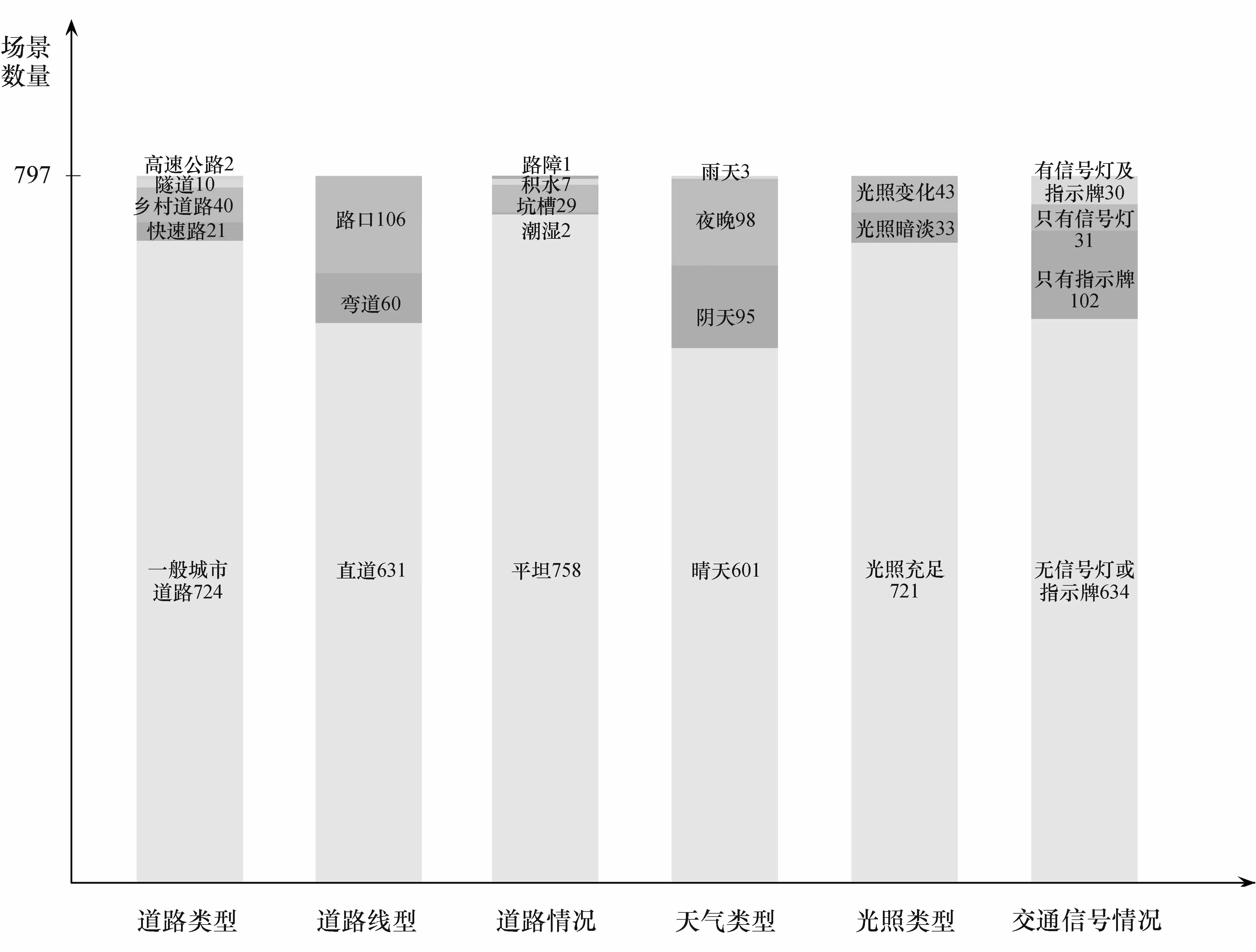
图2 环境因素场景统计
本试验中装载的驾驶辅助系统终端一共设置了10种报警功能,分别是:前向碰撞报警、车道偏离报警、行人检测报警、急加速报警、急减速报警、急转弯报警和驾驶员的打哈欠、注意力分散、吸烟与视线脱离报警。驾驶辅助系统终端在报警的情况下,将报警发生前后的数据以视频的形式采集并上传,并按照报警类别自动分为上述10类。对比FOT试验中采集大量连续的自然驾驶场景,本试验依托于驾驶辅助系统中的算法逻辑,将在驾驶过程中遇到的危险工况进行在线提取与处理,将其分割成不同的报警时刻前后片段,在线完成自然驾驶场景中对于场景处理的大量工作,并针对不同报警功能进行归类。
采集的场景数据可分为车内数据和车外数据两大类,不同的报警时刻片段场景中包含了不同的参数信息。车内数据主要指驾驶员状态信息,如驾驶员状态、驾驶员视线等。车外数据中静态环境类型信息包括天气类型、光照情况、道路类型和道路线形等;动态交通场景包括前方障碍物类型、交通信号与标志类型、交通流状况、建筑物密集度、同向运动情况、异向运动情况和交叉路口冲突。车外交通工况参数如表1所示。
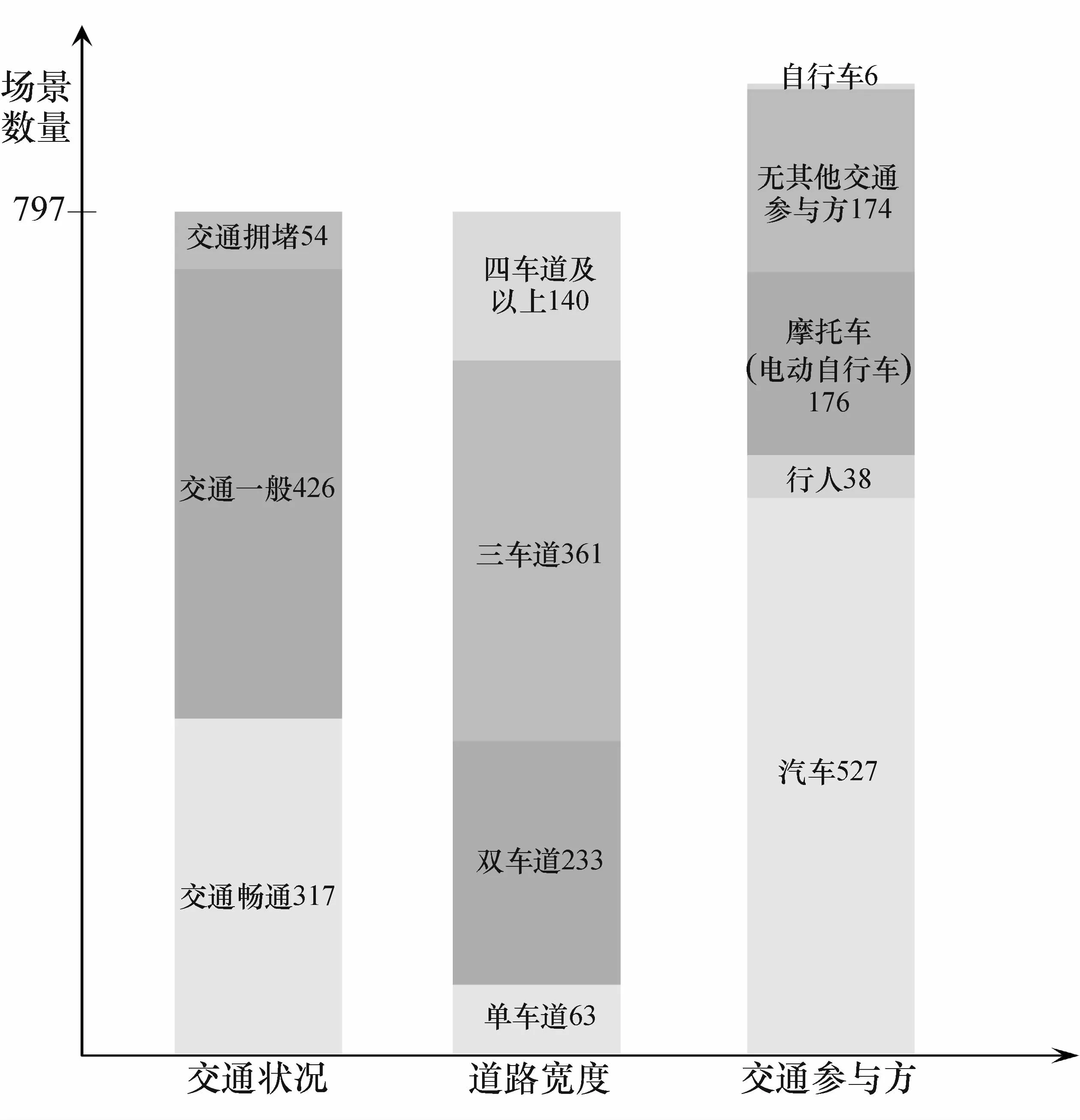
图3 交通流因素场景统计
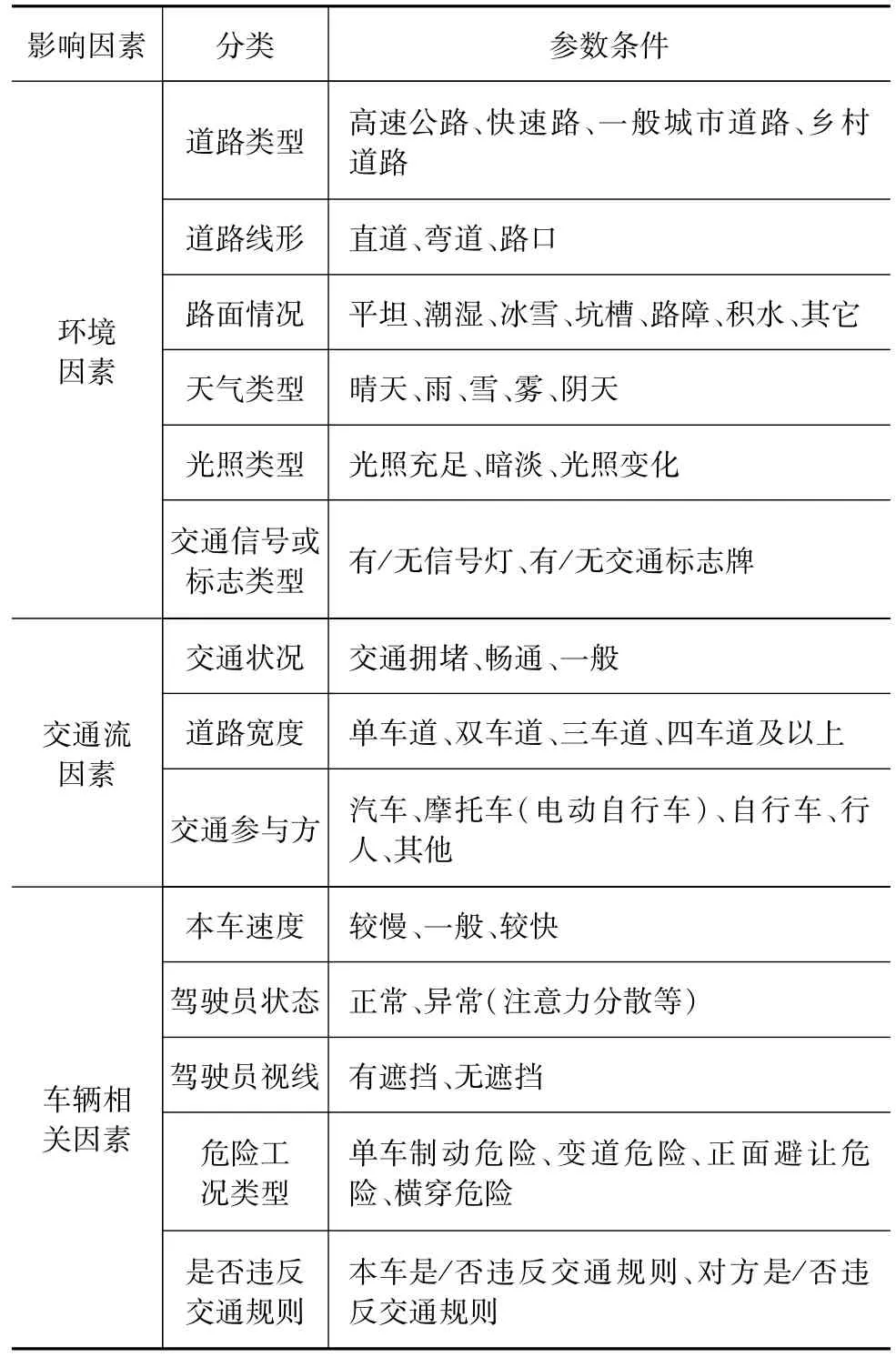
表1 驾驶工况场景因素参数表
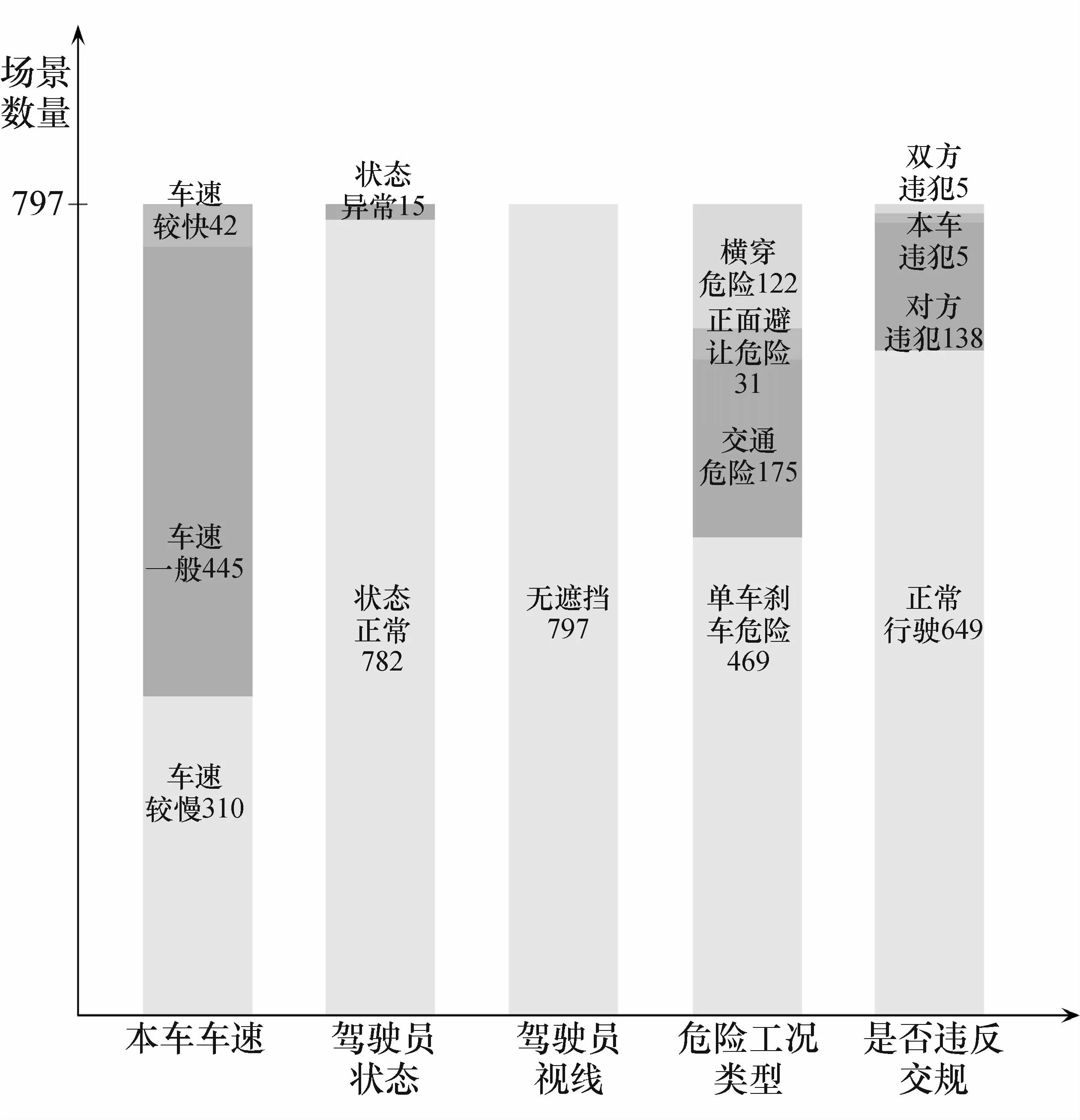
图4 车辆及交互因素场景统计
2 危险驾驶工况场景复杂度分析与评价
2.1 评价指标权重的确定
在对驾驶工况场景的分析与评价中,各种环境因素、交通流因素和车辆相关因素之间的关系错综复杂,是一个由多个指标和属性组成的综合性问题。层次分析法[11]能在对影响因素、内在关系和复杂决策的问题本质分析的基础上,把少量的定性比较信息转化为最底层相对于最高层的重要性权重的确定或相对优劣次序的排序问题[12],为不同交通驾驶工况场景的复杂度分析提供了有效依据。
根据表1对交通工况以及驾驶员状态参数影响因素条理化和层次化,构造出一个有序的、梯次递进的结构模型,驾驶工况场景的复杂度因素、环境因素、交通流因素和车辆相关因素的层次结构分别如图5~图8所示。
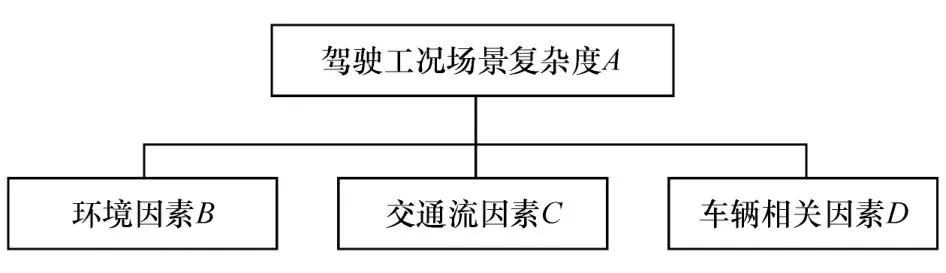
图5 驾驶工况场景复杂度影响因素层次结构
本研究中对于驾驶工况场景的分析采用专家咨询法,请多位资深专家、具有丰富驾驶经验的驾驶员进行评价打分。采用层次分析法[11],通过1~9标度对同一层次的每两个元素进行重要度比较,从而构建相应的判断矩阵,以此得到不同场景中不同因素的复杂度权重。其中判断矩阵各个元素和标度表示的含义如表2所示。
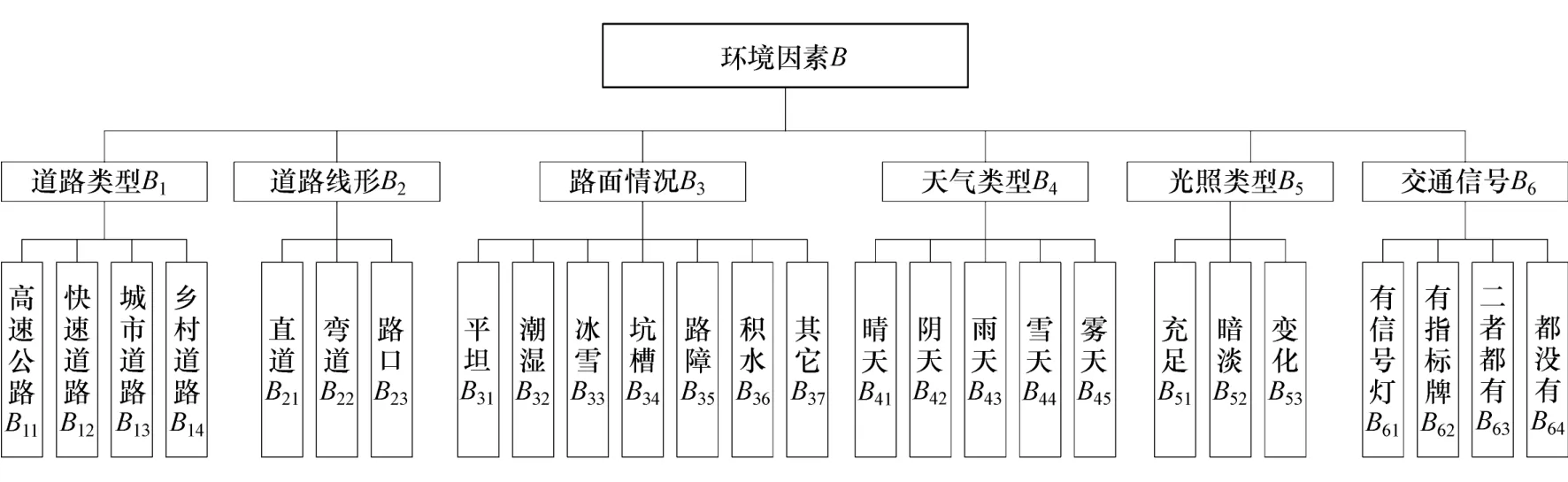
图6 驾驶工况场景环境因素层次结构
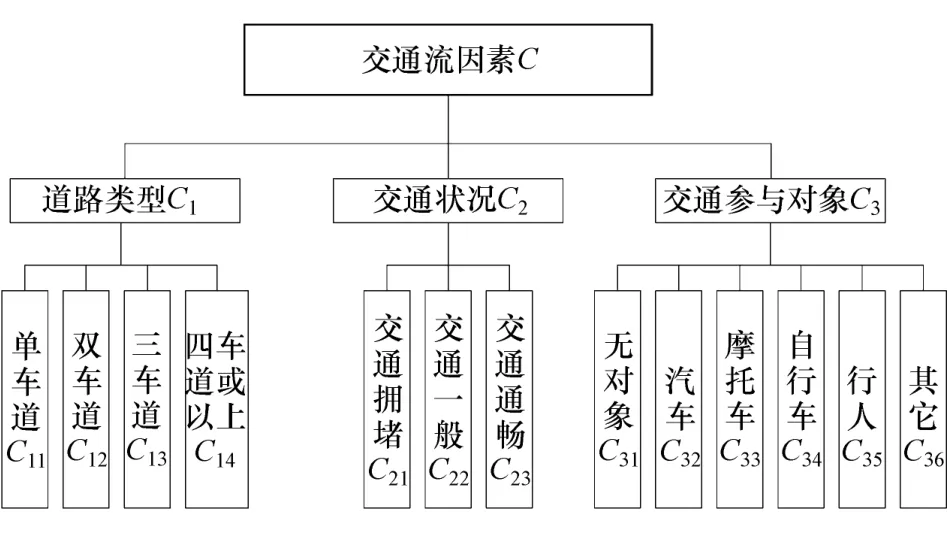
图7 驾驶工况场景交通流因素层次结构
不同场景中不同元素的复杂度权重是由所构建的判断矩阵特征向量w经过归一化处理而得。具体公式如下:

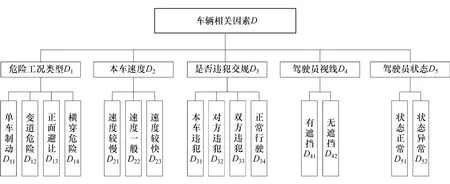
图8 驾驶工况场景车辆相关因素层次结构
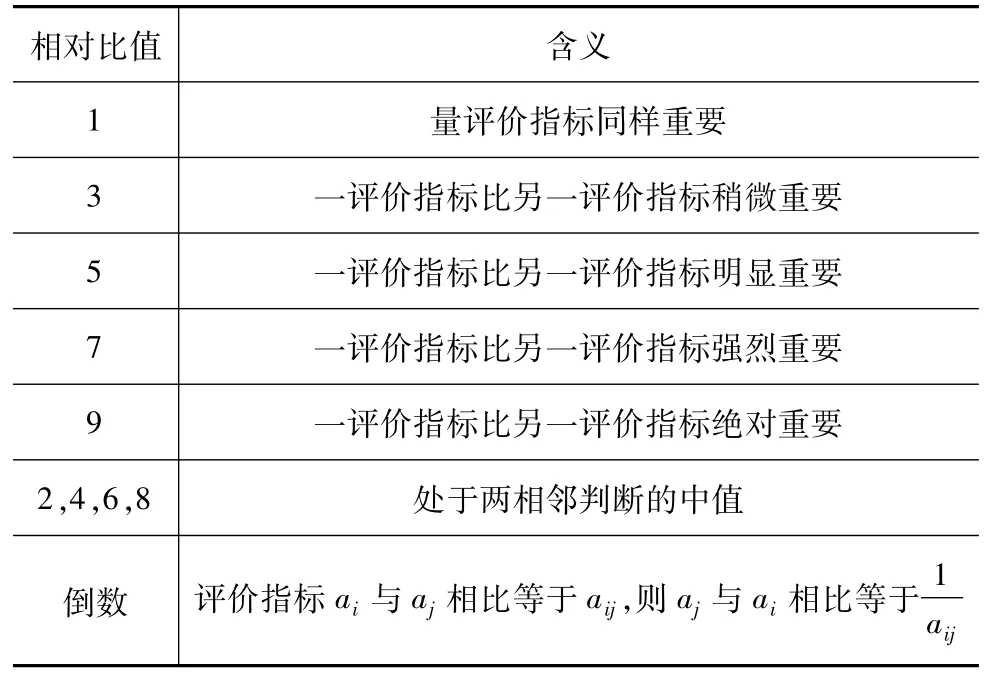
表2 9度标度法

式中 i,j=1,2,…,n。为保证权重指标的合理性,须根据判断矩阵求出最大特征值之后对判断矩阵进行一致性检验,一致性的定义公式为

式中:RI为层次总排序平均随机一致性指标的标准值,根据判断矩阵结束不同取不同值;CI为层次总排序一致性指标。CI的定义及相关计算公式为

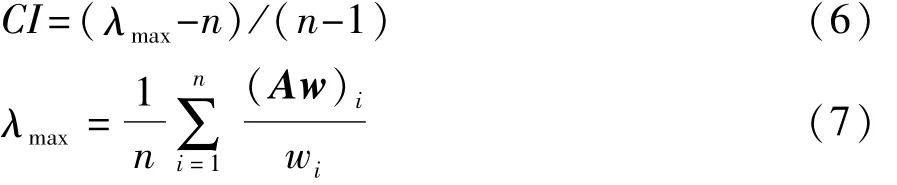
式中:λmax为判断矩阵最大特征值;n为判断矩阵的阶数;A为矩阵。如果CR<0.1,说明判断矩阵的一致性良好,即可得到评价指标针对上一层次的权重。
2.2 算例分析
以道路类型为例,判断矩阵B1如下:
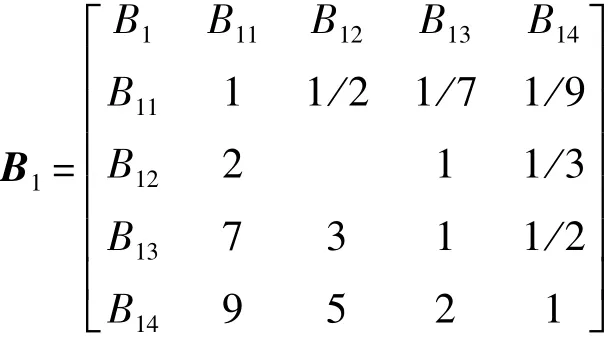
通过计算得到,λmax=4.017,CR=0.006<0.1,判断矩阵一致性良好。在道路类型B1中,高速公路B11、快速道路B12、城市道路 B13和乡村道路 B14复杂度权重比分别为5.2%、10.4%、31.2%和53.2%。
根据上述计算方法,其他层次和判断矩阵的计算结果如表3所示。
根据上述计算结果,结合通过驾驶辅助系统采集的场景数据,可计算某一场景的综合复杂度。以场景A(高速公路+直道+平坦路面+晴天+光照一般+有信号灯+双车道+交通畅通+汽车参与+单车制动危险+本车速度较快+正常行驶+驾驶员视线无遮挡+驾驶员状态正常)为例,其场景复杂度为
复杂度 A=环境因素 B×(B1×B11+B2×B21+…)+交通流因素 C×(C1×C12+C2×C23+…)+车辆相关因素 D×(D1×D11+D2×D23+…)
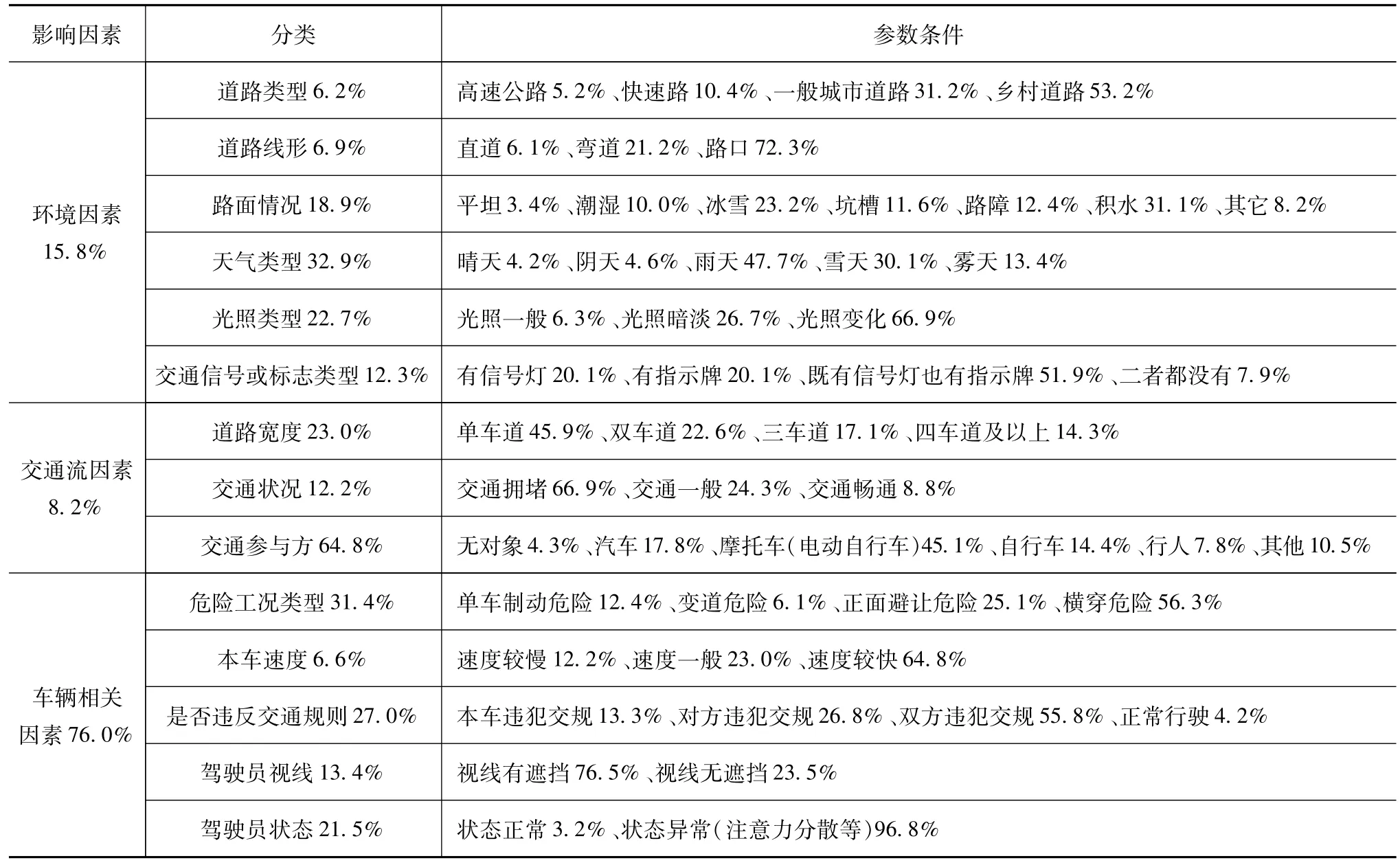
表3 驾驶工况场景因素复杂度
3 结论
本文中通过对危险驾驶工况场景数据的采集和相关影响因素的分析,提出了一种对危险工况场景复杂度进行综合评价的方法。与通常大型实车道路试验中对自然驾驶数据采集不同的是,本试验中利用驾驶辅助系统终端对其报警前后的驾驶工况数据进行采集,对紧急工况进行在线筛选和处理,大幅降低了人工处理成本。同时,根据不同的交通影响因素,对采集的场景数据进行分析和标签化处理,构建了危险驾驶工况场景库。应用层次分析法,基于多名专家的评分结果,提出了对不同驾驶工况场景进行复杂度评价的方法。此评价方法对应危险驾驶工况中的场景,能应用于智能汽车或自动驾驶系统的仿真测试与评价。