电磁循迹式越野智能车的协调控制
2020-06-08余善恩丁禹心冯小龙黄继业
余善恩,丁禹心,冯小龙,黄继业
(1.杭州电子科技大学自动化学院,浙江 杭州 310018;2.杭州电子科技大学电子信息学院,浙江 杭州 310018)
0 引 言
随着先进传感器、信息融合、导航、人工智能、计算机控制、驱动等技术的发展,无人驾驶的智能车将成为未来智能交通的主流[1]。目前,智能车对道路识别的方法主要有基于道路标志线的图像识别[2-3]、铺设金属轨道作为循迹引导[4]、利用电磁信号循迹检测[5]。这些方法中,道路表面的标志物易受损,铺设的金属轨道易受干扰,而电磁循迹主要由感应线圈经谐振得到信号,不存在断点,且电磁引导线铺设简单,若再结合先进的环境感知技术,将具有很好的应用前景。目前,分别控制转向舵机和驱动电机的指令算法已有多种解决方案,包括传统比例-积分-微分控制算法(Proportion Integral Differential,PID)以及模糊控制[6]、神经网络[7]等智能控制算法。但是,由于电磁检测的前瞻距离较短、车体无法满足电磁越野智能车高速稳定行驶所需的良好动平衡性能要求、对复杂路况的适应性不够。因此,本文提出一种智能车舵机与电机指令协调控制方法,重点探讨舵机指令与直流电机指令的协调控制,以改善行驶的平稳性与快速性。
1 总体方案
本文提出的电磁循迹式越野智能车协调控制系统的组成如图1所示。
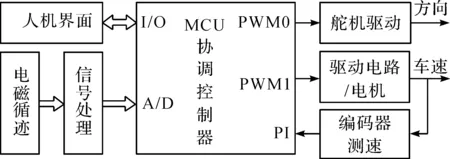
图1 电磁循迹式越野智能车控制系统框图
图1中,A/D为模拟量输入口,PI为脉冲量输入口,PWM0,PWM1为PWM信号输出口;电磁循迹用于赛道检测,MCU协调控制器根据输入的循迹信号及当前速度来调整舵机、电机的协调控制指令,从而实现对智能车的自动行驶控制。系统的核心目标是实时检测并预测轨道,协调控制转向与车速,实现智能车精准快速地运动。
2 赛道循迹检测方法
电磁循迹式越野智能车的引导线一般为单根漆包铜线,铜线中通过20 kHz、100 mA交变电流在空间中形成交变磁场。安装在智能小车前瞻处自制的8个水平工字型谐振式电磁感应线圈阵列(也称电磁循迹传感器,简称工字型电感)可以检测到磁场信息并转化为多路模拟信号输出。对输出的信号进行矢量运算,获取当前轨道信息,并结合历史数据获取赛道位置和方向预测信号,进而得到智能小车此时的车身位置与赛道中心位置的偏移量,将此偏移量转换为角度误差并据此得出舵机的修正指令,实现对智能小车的轨迹控制与方向预测。
3 智能车协调控制方法
3.1 赛道循迹信号检测与处理
通过电磁循迹检测方法获得的信号为多路模拟量信号,接到单片机的A/D输入口,经单片机运算后赛道循迹分辨率可达2 mm,且基本不受引导线电流变化影响。微控制单元(Micro-Control Unit,MCU)根据周期中断定时器(Programmable Interval Timer,PIT)产生的定时中断周期性地进入中断服务子程序,控制周期为5 ms;每次中断处理对A/D信号进行转换处理与存储,采样得到的新数据放入队尾并舍弃队首的数据,将队列中的N个数据进行智能加权运算,计算值作为滤波输出值,即进行加权递推平均滤波。由于小车尺寸的限制,电磁检测前瞻不够长,小车速度的增加受信号延迟的限制,因此需给予越接近当前时刻的数据越大的权值,使系统灵敏度得到提高。5 ms采样周期相对较短,不会影响信号的平滑度。虽然滤波后检测信号仍存在一定的滞后性,但经过长时间运行后,发现滤波后得到的信号平稳,更有利于智能车的控制,利大于弊,即加权递推平均滤波算法是比较适合智能车引导信号处理的。
3.2 智能车速度与转向协调控制
3.2.1 智能车协调控制方案
智能车协调控制算法示意如图2所示,驱动电机为直流电动机,采用PWM驱动控制,并以增量式光电编码器检测行驶速度,构成车速闭环控制系统;舵机是以电位器作为角度检测环节的直流电机位置闭环控制系统。其中,Δθ,Δθ*(单位:°)分别为舵机方向角及其指令(实际中是以脉宽作为方向角指令),ASR为车速调节器,V,V*分别为车速及其指令(单位:m/s),n,n*分别为车轮驱动电机的转速及其指令(单位:rpm),FL为路面对车轮的摩擦阻力(单位:N),j为减速比,r为车轮半径(单位:m),WV(s)为转速-车速变换传函,WASR(s)为车速调节器ASR的控制算法,Wd(s)为PWM驱动器传函,其中Ks,Ts分别为PWM装置的放大系数、延迟时间,WF(s)为路况阻力作用通道的传函,Wm(s)为LS-540SM直流电动机传函,其中Tm,Tl分别为直流电机的机电时间常数、电磁时间常数。
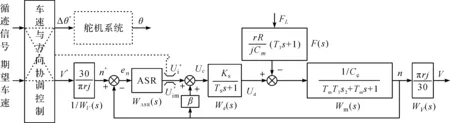
图2 智能车协调控制算法示意图

(1)
式中,V*为转速指令值(单位:m/s),Vt0为当前初始速度(可正、负),Vm为最大速度,ΔV为所需的速度改变量(可正、负),τrd为从Vt0到Vt0+ΔV的所需时间(单位:s),τrdN为最大加减速时间(单位:s),t为时间(单位:s)。
3.2.2 智能车速度控制
智能车速度控制系统的传递函数如下:
(2)
车速调节算法WASR(s)在系统频带内的设计目标如下:
显然,对于智能车而言,为提高自动驾驶的平稳性与快速性,在设计车速控制算法时,只能在对车速指令跟踪的快速性与对时变复杂路况阻力FL的抗扰性之间取得平衡。
为满足设计目标要求,所用的WASR(s)基本算法如下:
(3)
式中,T0为滤波时间常数,kp为比例系数,τi为积分时间常数,τd为微分时间常数。
对电枢电流约束控制的前提下,按典II最优系统[8]整定参数,得到:
(4)
式中,Idm为电枢电流限制值,并设Tl>max{T0,Ts}。为进一步提高智能车的控制性能,结合智能车对实时性要求高的特点,车速控制算法在式(3)—(4)基础上改进,采用无扰动切换的Bang-Bang/PID综合控制算法,用计算机控制实现时,PID采用基于不完全微分[9]与抗饱和的增量式离散算法。此外,实际车速信号取自与电机通过联轴器连接的增量式光电编码器,用四倍频及M/T算法以提高数字测速的实时性与准确性。
3.2.3 转向控制
智能车的转向通过舵机实现。舵机的本质是基于直流电机的方向角控制系统,通过输入脉宽指令进行角度控制,一般舵机指令信号采用周期为5 ms的PWM信号,其指令脉宽0.5~2.5 ms分别对应于-90°~+90°(或0°~180°)方向角。舵机角度控制系统的建模分析方法类似于车速控制系统,限于篇幅故不赘述。实验证明,采用带滤波的模糊PD算法不仅可提高舵机响应的快速性,还能实现对不同路况条件下的转向优化控制,如:提高直道行驶的平稳性、入弯及出弯迅速、弯道最大程度内切以实现通过时间最短。
4 系统实现及结果演示
为了验证本文提出的转向与速度协调控制方法的可行性,本文设计了电磁越野智能车,并参加了第十四届全国大学生“恩智浦”杯智能汽车竞赛室外电磁组。根据竞赛要求,参赛的智能车必须在指定车模底盘上加装各类自主设计制作的硬件电路、机械装置等,竞赛时须以电磁循迹形式引导车模顺利通过所有赛道元素,用时短者胜。据此要求,设计制作了一辆利用工字型电感检测赛道、四轮驱动、采用协调控制方法进行车速及转向控制的智能车模,主要包括硬件、软件、机械的设计与制作、调试工作。
4.1 硬件功能
越野智能车采用L型车模,智能车驱动电机为LS540SM直流电机,采用PWM驱动控制,8.5 V锂电池供电,增量式光电编码器为512P/R,协调控制器的MCU采用NXP公司的MKV58F1M0VLQ24,其为CORTEX-M7内核,供电电压为3.3 V,系统频率可达240 MHz。该MCU的PTE4~6/12/16~20/24接口可作为电磁循迹的模拟量信号输入口;FTM2模块的PTE22/23接口作为增量式光电编码器的脉冲信号输入口;FTM0模块的PTE29接口作为舵机控制信号的输出口;FTM3模块的PTE7/8接口作为小车车速控制信号的输出口;PTA24~29、PTB0、PTE0~3接口作为人机界面(LCD、按键等)的接口。
4.2 软件功能
程序主体采用前后台结构,流程如图3所示。其中,主函数中仅执行OLED屏幕扫描及键盘扫描,核心操作均放在定时器中断程序中。上电开机后,首先对所有硬件接口进行初始化,对A/D采集到的电磁循迹电压信号进行分析并计算出当前赛道对应的系统最佳运行参数,进而控制舵机与驱动电机。

图3 智能车控制软件流程
4.3 机械结构
机构设计部分主要为改进转向机构以提高转向控制性能,并按动平衡要求,对测控装置的总体安装进行合理布局以提高智能车自动行驶的平稳性和快速性,限于篇幅故不赘述。
4.4 智能车赛道运行结果
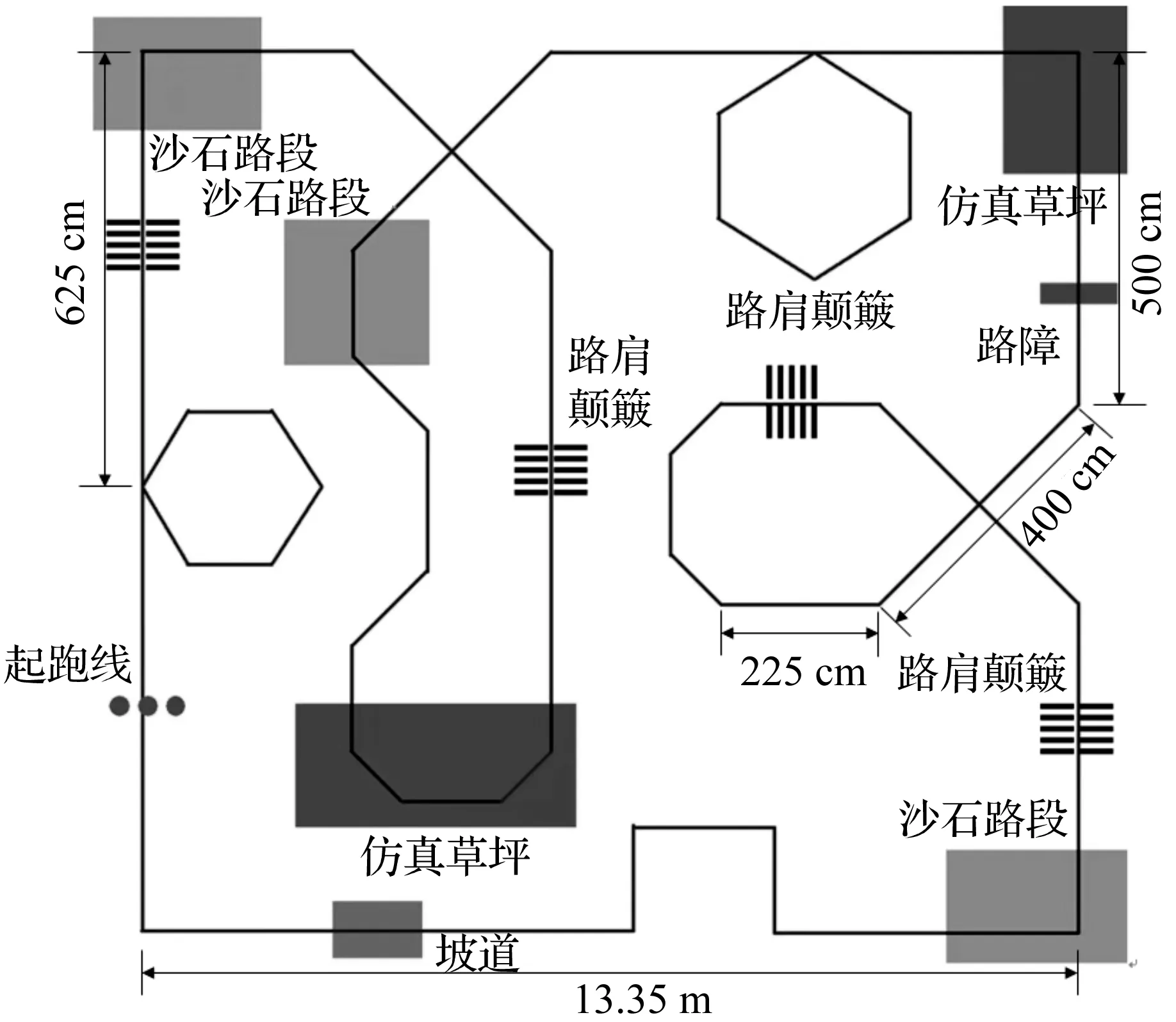
图4 第十四届全国大学生智能汽车竞赛总决赛的预赛赛道示意图
本文智能车所用的直流电机系统对象参数为:额定电压7.4 V、空载转速17 000±10% rpm、最大空载电流1.7 A、最小堵转电流35 A,减速比10.55∶1.00,车轮外径88 mm,PWM频率5 500 Hz,Ks=7.4,Ce=0.000 414 V/rpm;控制参数:β=0.056×10-3V/rpm,Kp=0.5,τi=10 ms,τd=2 ms。根据以上参数设计的智能车经一年多的制作、调试,各项功能与技术规范均符合第十四届全国大学生“恩智浦杯”智能汽车竞赛的各项技术要求,并据此进行反复运行实验;最后,按上述参数自行设计的智能车参加了2019年全国大学生智能汽车竞赛的分赛区竞赛及全国总决赛,在越野路况下的运行情况如下:
(1)赛前试验结果:赛道长93.7 m,自主循迹驾驶的最短用时32.1 s,平均速度达到2.92 m/s;(2)省赛测试结果:越野赛道长95 m,自主循迹驾驶用时33.517 s;(3)国赛总决赛测试结果:越野赛道长165.47 m,自主循迹驾驶用时68.614 s。赛道元素如图4所示,在赛道运行中全程行驶平稳,且无论在分赛区还是全国总决赛中车速都是最快的。因此,按照本文提出的控制方法设计制作的智能车性能优异。
5 结束语
本文提出一种电磁循迹式越野智能车协调控制系统,系统注重转向与车速的协调统一,使电磁越野智能车兼具前瞻性与稳定性。电磁导航技术具有低成本、高容错率等优点,本文方法为智能交通领域应用发展提供一定的参考。同时,随着人工智能技术的发展,将智能化理论与本文方法进行融合,可以进一步拓展其适用性。
