基于元胞自动机的带噪暗图增强改进模型研究
2020-06-08郑雪峰周彦均马学条王永慧
郑雪峰,周彦均,马学条,王永慧
(杭州电子科技大学电子信息学院,浙江 杭州 310018)
0 引 言
随着数字图像处理技术的迅速发展,图像增强技术作为图像处理的重要组成部分,逐步涉及人类生活和社会生产的各个方面,在医学成像、遥感成像、人物摄影等领域有着广泛应用[1]。图像增强技术用于改善图像质量、丰富信息量、加强图像判读和识别效果,通过对图像进行对比度增强、彩色图像增强及视觉感知一致性等方面的处理来获得高质量的图像[2]。随着图像技术研究的不断深入,图像增强方法不断涌现,例如,将模糊映射理论引入图像增强算法[3-4];利用多层直方图结合亮度保持的均衡算法、动态分层直方图均衡算法[5-7]等。在昏暗环境下,景物图像偏暗,整体灰度分布集中,对比度低,灰度层次不明,边缘模糊,用经典元胞锐化模型对无噪音暗图进行图像增强可以获得良好效果[8]。但是,当暗图受到高斯、椒盐、泊松、乘性等噪声干扰时,其平滑残留噪声再次被锐化,残余噪音被重塑,影响边缘检测效果[9-10]。本文在经典元胞锐化模型的基础上,根据带噪暗图的带噪点与周围点色差远小于边缘点与周围点色差的特征,结合元胞自动机,研究一种基于元胞自动机的带噪暗图增强改进模型。
1 经典元胞锐化模型
元胞自动机(Cellular Automata,CA)是一个动力学系统,由元胞、元胞空间、邻居及局部规划组成。具体描述为:在一个元胞空间Z(由离散、有限状态的元胞组成)内,按照局部规则F,在离散时间t上推演的动力学系统[11]。具体表示如下:
(1)
经典元胞锐化模型采用元胞自动机原理进行图像锐化处理,使用极值规则(ER规则)来完成图像锐化,一般采用的是最近极值规则(NE规则),具体描述如下:
每个元胞的状态值用图像对应坐标的像素点的灰度值来表示,计算元胞此刻与邻域内的最大值元胞和最小值元胞的距离Lmax和Lmin,若Lmax
G=(V,E),xi∈[0,255]
Vi={j∈vi∶j∈E且j≠i}
其中,G为无向图,V为像素点,E为像素点间的边,xi为第i个像素的取值,Vi为第i个像素的邻域集合,用像素点元胞转换函数fi(xi∶j∈vi)表示其强度状态,可得:
fi(xi∶j∈vi)∈{mi,xi,Mi},xi∉[mi,M]⟹fi(xi∶j∈vi)=xi
(2)
式中,Mi为邻域中的极大值,mi为邻域中的极小值,j为元胞邻域内除中心元胞点外的像素点。
元胞锐化后的图像用元胞边缘检测模型进行边缘检测,从而获取图像中的边缘信息[12]。检测过程中,中心元胞大于领域内大部分像素点时,判定为边缘。对于细小边缘点来说,很容易被屏蔽。元胞锐化时,不仅增强了边缘信号,同时也增强了滤波时残留的噪声信号,在元胞边缘检测时,增强后的噪音点可能被判定为边缘,故干扰了边缘检测的结果。
经典元胞锐化模型处理带噪暗图时,无法区别边缘点和带噪点的增强效果,所以,经典元胞锐化模型并不适合对带噪暗图进行图像增强[13-15]。
2 基于元胞自动机的带噪暗图增强改进模型
为了提高带噪暗图的边缘检测准确率,本文在经典元胞锐化模型的基础上进行模型改进。
2.1 带噪暗图增强改进模型
经典元胞锐化模型采用最近极值规则来代替原有数值,本文提出的改进模型采用极值修正值来代替原有数值,极值修正值含有锐化强度S。在对图像的带噪点和边缘点进行区分时,通过调整锐化强度,使得两者之间的差异更加明显,从而提高识别准确率。
改进模型如下:
(3)

元胞锐化改进模型的具体实现过程如图1所示。基于元胞锐化改进模型的元胞自动机带噪暗图增强改进系统如图2所示。
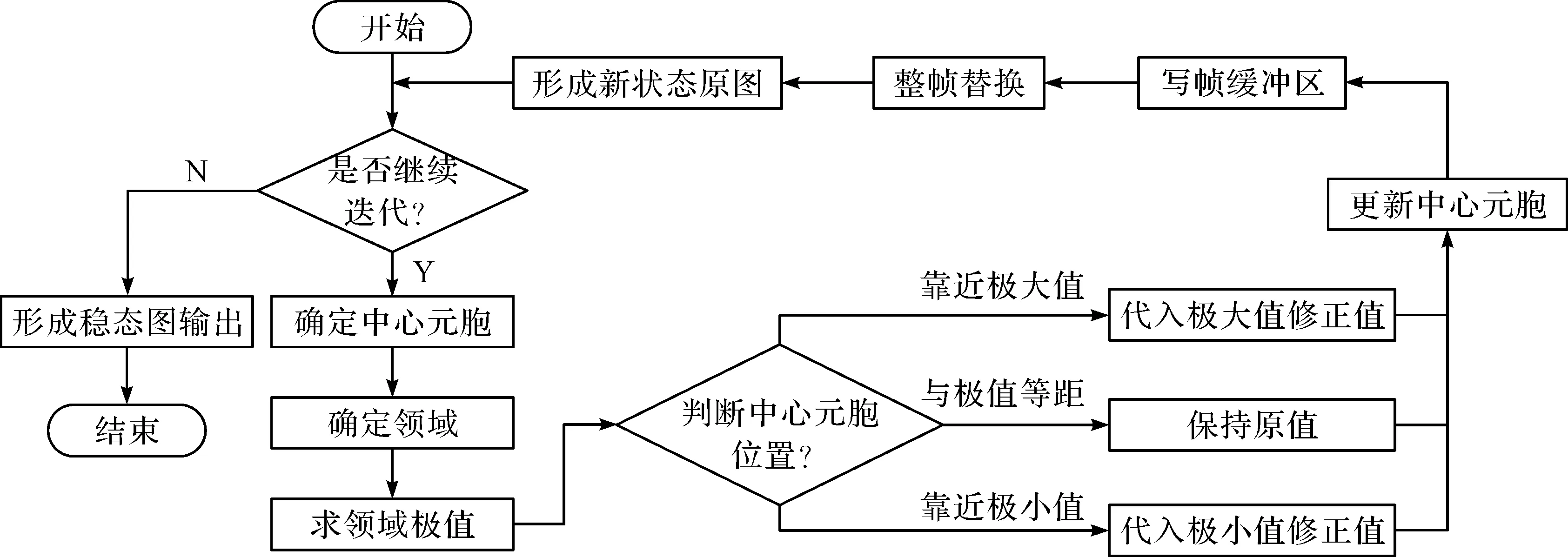
图1 元胞锐化改进模型流程图
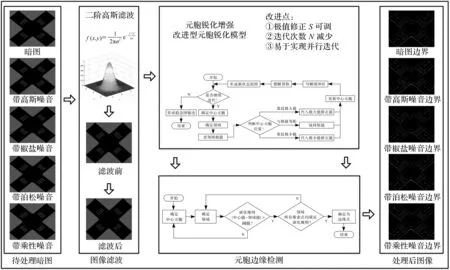
图2 基于元胞自动机的带噪暗图增强改进系统
2.2 锐化强度参数获取
本文采用F-Score作为综合指标来评价边缘检测的正确率。F-Score是精确率和召回率的调和平均,F-score值越大越好[16]。其计算公式如下:
(4)
式中,P为Precision(精确率),R为Recall(召回率)。
锐化强度S的取值范围为(0,1.0],分别取不同值,在4种噪声(高斯、椒盐、泊松、乘性)干扰下,对“十字路口”图、Pepper图、Lenna图进行仿真,得到F-score值如表1所示。
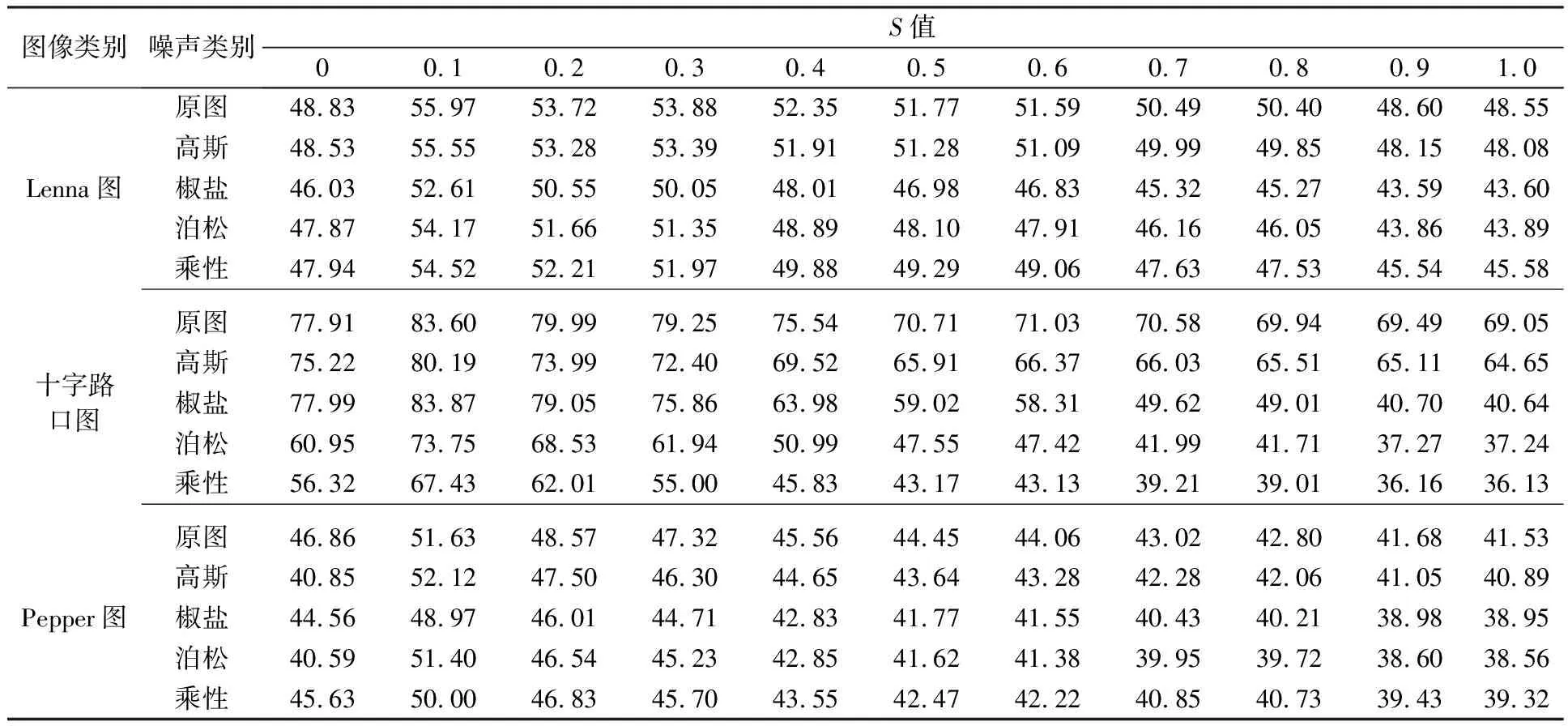
表1 不同锐化强度和噪声干扰下,不同图像的F-score值 %
从表1中可以看出:“十字路口”图最佳S范围为0.08~0.18;Pepper图的最佳S范围为0.09~0.18;Lenna图的最佳S范围为0.09~0.11,综合考虑选取S=0.10。
3 实验结果及评价分析
为了对经典元胞锐化模型和元胞锐化改进模型两种模型进行比较,分别进行实景真图演示和仿真实验。实验使用MATLAB 8.4.0为仿真工具,在处理器为Inter(R) Corel(TM)i7-7700HQ CPU @2.80GHz 2.81GHz,内存为4GB的PC机上进行仿真,改进模型的锐化强度系数S取值为0.10。
3.1 实景图实验
在暗环境下,拍摄咖啡杯实景,拍摄中的噪声已经夹杂在图像中,分别采用经典元胞锐化模型和元胞锐化改进模型进行图像增强处理,结果如图3所示。
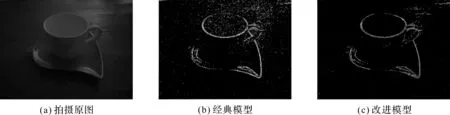
图3 实景图实验结果比较
从图3可以看出:采用经典模型得到的效果图中,反光部分和杯口内有大量杂点,改进模型效果图中只有少量杂点,说明改进模型具有良好的抗噪性能。
3.2 仿真实验与分析
对原图进行亮度减半,再分别添加高斯、椒盐、泊松、乘性干扰噪声,形成带噪暗图。
仿真实验中,采用经典模型和改进模型分别对“十字路口”图、Pepper图、Lenna图进行仿真实验。其中“十字路口”图增强后的效果如图4—7所示。
根据图4—7可以看出:改进模型处理的效果图中,边缘清晰无杂点,说明元胞锐化改进模型通过增加锐化强度系数S,对带噪点和边缘点作不同比例增强,边缘点被保留,带噪点被屏蔽,对带噪暗图有较好的边缘检测正确率,具有良好的抗噪性。
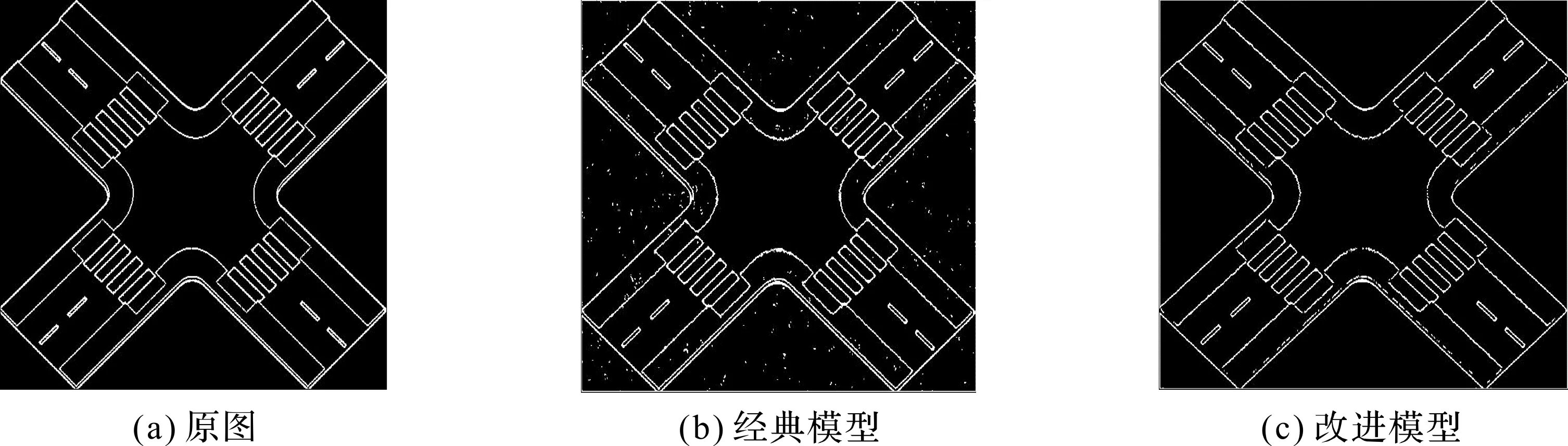
图4 “十字路口”带高斯噪声暗图仿真结果
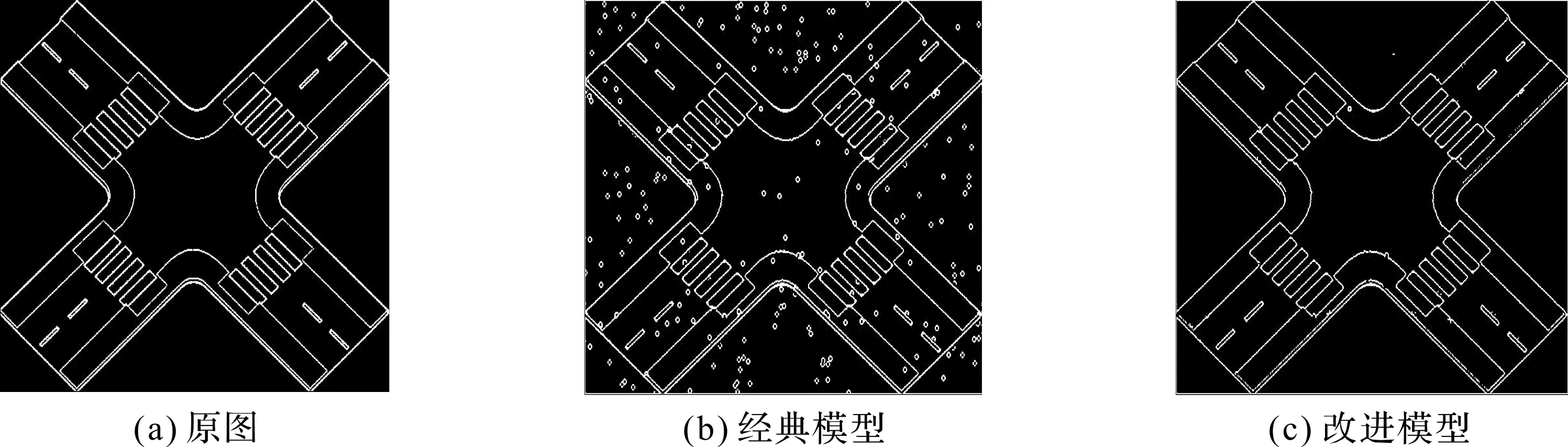
图5 “十字路口”带椒盐噪声暗图仿真结果
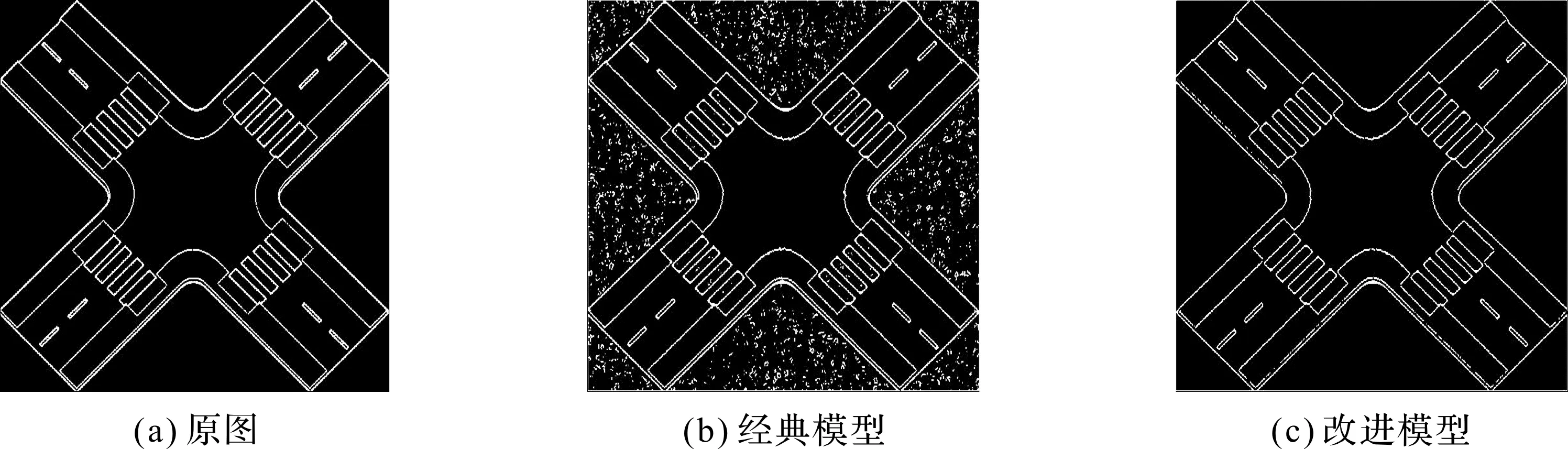
图6 “十字路口”带泊松噪声暗图仿真结果
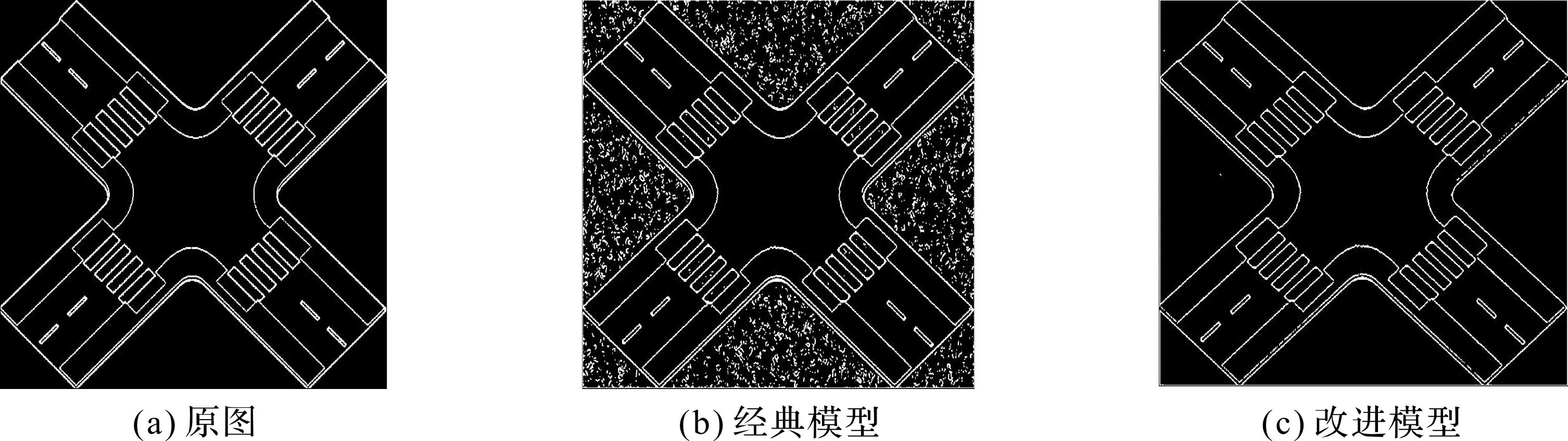
图7 “十字路口”带乘性噪声暗图仿真结果
本文采用F-score指标和边缘保持指数(Edge Preservation Index,EPI)两项评价标准对边缘识别正确率进行评价。
边缘保持指数EPI用于评价边缘保持能力[17],定义如下:
(5)
(6)
EPIi越小,图像边缘保持得越好。
采用经典模型和改进模型计算得出“十字路口”图、Pepper图、Lenna带噪暗图的F-Score值如表2所示,EPIi如表3所示。
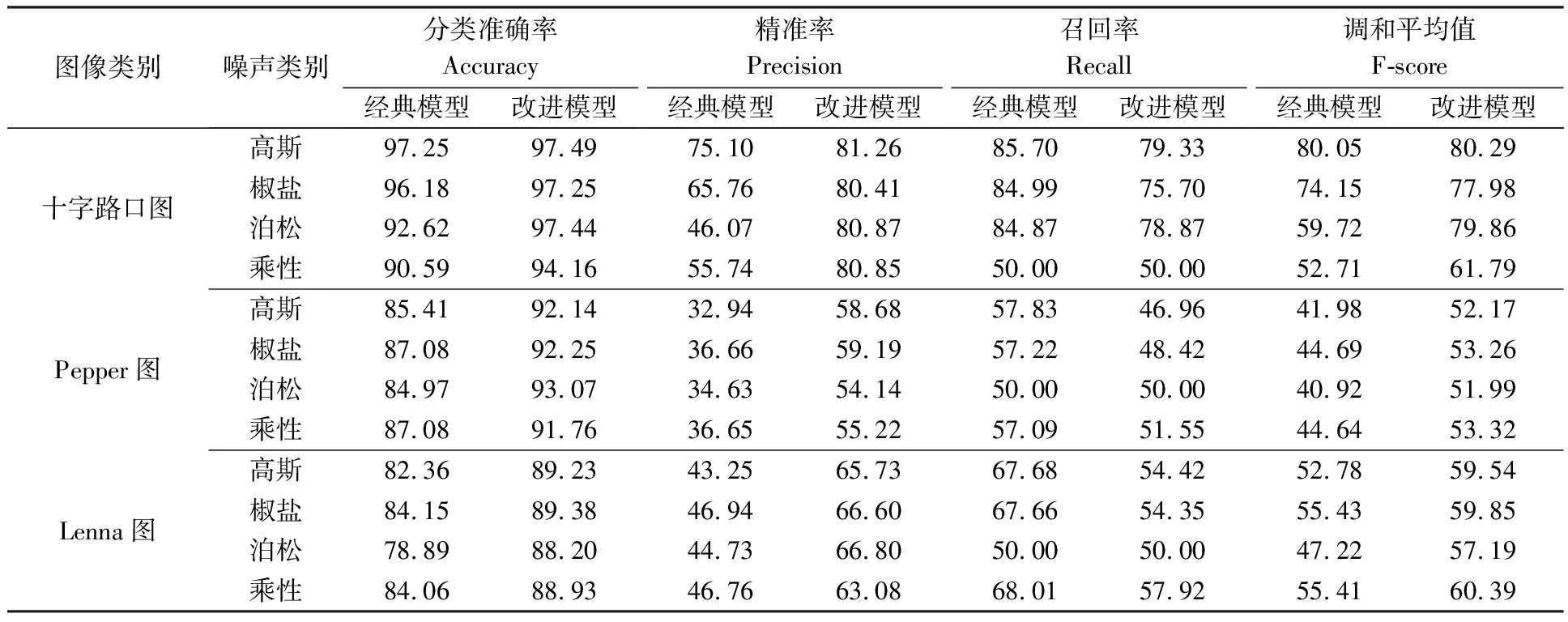
表2 不同噪声干扰下,不同图像的F-score值 %
从表2可以看出:采用改进模型处理时,其F-Score值都比经典模型高,说明改进模型具有较好的带噪暗图增强功能和边缘检测能力。

表3 不同噪声干扰下,不同图像的EPIi
从表2可以看出:采用改进模型处理时,其EPIi值都比经典模型小,根据比较结果得到的性能平均提高了33.8%,说明改进模型的边界保持性能优于经典模型。
4 结束语
本文通过增加锐化强度S参数,对经典元胞锐化模型进行改进,克服了因残留噪声被同步增强产生边缘检测出现干扰杂点的不良现象,提高了元胞锐化方式对图像增强的抗噪性能。但是,对S参数自适应选取有所不足,下一步将展开进一步研究。
