基于视距视区优化的夜间过街安全改善研究*
2020-06-03余昕宇杜志刚倪玉丹
余昕宇 杜志刚 倪玉丹
(武汉理工大学交通学院 武汉 430063)
0 引 言
近10年,我国城市行人事故伤亡人数在城市交通事故伤亡中的占比超过30%,每年都有上万名行人因交通事故受伤甚至死亡.据相关文献表明,夜间发生交通事故几率是昼间的5~10倍,且其危害性远远高于白天发生的交通事故[1].夜间过街交通事故呈现伤亡惨重、破坏力强和突发概率高的特点,其根本原因是夜间光照强度显著降低、车流量少且车速高导致驾驶员对过街行人的视认距离减小,突发状况时驾驶员来不及采取刹车等措施.
关于夜间行车安全,国内外学者进行了诸多研究.在夜间环境对驾驶员行车安全影响方面:Suh等[2]等发现,夜间不良照明条件会使驾驶员产生车辆行驶速度不快的错觉,诱发驾驶员提高车速甚至超速;程国柱等[3]通过对比分析驾驶员昼夜识别距离差异,得出驾驶员夜间识别距离较白天识别距离平均下降8.5%,下降最大值为30.4%;程国柱等[4]研究驾驶员夜间对过街行人的视认距离随行驶车速及路灯平均照度的变化规律:驾驶员夜间对过街行人的视认距离随行驶车速的提高而降低,二者呈负线性相关;随平均照度的提高而增加,二者呈正对数相关;张卫华等[5]采用Pearson相关系数法和结构方程模型(SEM)建模方法,研究低能见度环境中危险驾驶行为与驾驶能力描述性变量间的关系,得出在低能见度环境中,危险感知能力是影响错误行为发生的主要因素.在夜间行车安全改善方面:程国柱等[6]基于安全行驶判别条件,给出了城市道路人行横道处夜间限速标志前置距离的确定方法及对应不同路面类型、车速限制值和路灯平均照度的建议值;Brown等[7]通过研究认为夜视系统有助于驾驶员改善其视认距离,但与此同时也会增加驾驶员的工作负担.
综上,已有研究主要侧重于在道路交通条件良好的环境中驾驶员空间判识规律以及单一过街安全设施、夜视系统等有效性研究,缺乏对驾驶员夜间行车的视觉任务及视觉特性的综合考量.目前国内外对人行横道过街安全改善方法主要有3种:①法定限速方法,法定限速具有强制性,确定某个人行横道的最高限速值让驾驶员低速通过该区域;②提升人行横道照度,借助照明灯具优化过街环境;③利用反光标识等交通安全设施,提高夜间行人可视性,加强对驾驶员的警示和诱导.鉴于此,本文从夜间人行横道事故机理出发,设计一种安全有效、全生命周期成本低的过街设施,以期为改善行人夜间过街安全提出一种新的研究思路和改善方法,降低行人夜间过街事故率和事故危险程度.
1 基于视距视区优化的夜间过街安全改善设计
1.1 夜间环境对驾驶员过街安全影响分析
区别于白天,驾驶员在夜间行车时,有不同视标障碍物识别、道路环境判断、视神经调节等视觉任务[8].夜间行驶时,驾驶员视线受到影响,妨碍驾驶员对道路信息的及时获取,影响其驾驶决策的准确性.因此,夜间环境对驾驶员心理、生理,以及驾驶行为均有不同程度的影响.
1) 危险感知能力差,反应时间增大.驾驶员在夜间时对遇到的各种复杂交通状况的机敏性降低,普遍呈现失误次数增多的趋势.研究表明:驾驶员遇到低能见度环境时会更容易紧张,且低能见度环境中危险感知能力、低能见度事故对低能见度环境中失误行为有间接影响.同时,随着照度降低,驾驶员反应时间逐渐增大.
2) 夜间能见度低,视距视区不足.驾驶员在夜间行车动视力随着车速提高而降低,一般情况下比静视力低10%~40%,动态可视距离随着相对速度提高而降低.同时,动视力的降低影响驾驶员对于过街行人以及对道路标志、标线的辨认.行车速度越高,驾驶员越注视远方,视野越窄,注意力随之引向景象中心而置两侧于不顾.
3) 视觉参照系缺失,障碍物判识困难.夜间行车,虽然有前照灯照明,过街驾驶环境和周围夜色融合为一体,色差对照相较于白天显著降低,车辆行驶所需参照系模糊或消失,驾驶员颜色检测及分辨能力下降,对障碍物判识尺寸精度明显降低,影响驾驶决策和行车安全.夜间环境对驾驶员过街安全影响见图1.
综上,驾驶员行驶在对比度低、色差不足的夜间过街路段时,由于普遍存在的能见度低、参照系缺失等问题,其危险感知能力、颜色尺寸检测分辨能力降低,动视力下降,反应时间增大,导致驾驶员对障碍物判识困难以及视距视区不足,严重影响行车安全.
1.2 改善思路
低照度、单调过街环境下易造成驾驶员视距视区不足、心理紧张、反应时间增大,驾驶员可获取的道路信息极为有限[8].研究表明,道路环境中高中低频信息流结合可以满足驾驶员的速度感、距离感、方向感,提升驾驶员速度距离等感知能力[9].因此,可通过丰富过街路段视觉参照系提高驾驶员危险感知能力,优化驾驶员视距视区来提升行车安全性.
由于在驶近人行横道时无法正确判识行人位置、速度等信息,驾驶员在紧急状态下需在变换车道、调整车速、停车等几种驾驶行为中做出决策,比单纯紧急停车需要预留更多的时间和空间.从而此处引入决策视距的概念,决策视距是指驾驶员得以安全变换车道、车速、车向或停止,完成安全驾驶所需的距离,由识别段的认知距离和接近段的行动距离组成,识别段驾驶员需完成发现目标、辨识风险任务,接近段驾驶员依次进行决策、采取和完成动作.
基于此,本文选取决策视距及停车视距作为参照点,提出驾驶员在不同位置的视觉需求:在决策视距之前让驾驶员明确斑马线位置,看清潜在障碍物;在停车视距之前让驾驶员明晰斑马线轮廓,及时发现过街行人,达到提升视距扩大视区的效果.改善前后评价信息对比见表1.

表1 改善前后评价信息对比
1.3 设计方法
行人过街安全改善设计主要是在过街路段路面、路缘以及斑马线位置设置多频率、多尺寸的视觉信息,利用连续性强、夜间显著性高的反光设施将对比度低、色差不足的视觉环境转化为视觉参照系丰富的视觉环境,安全改善设计方案效果见图2,方案信息见表2.
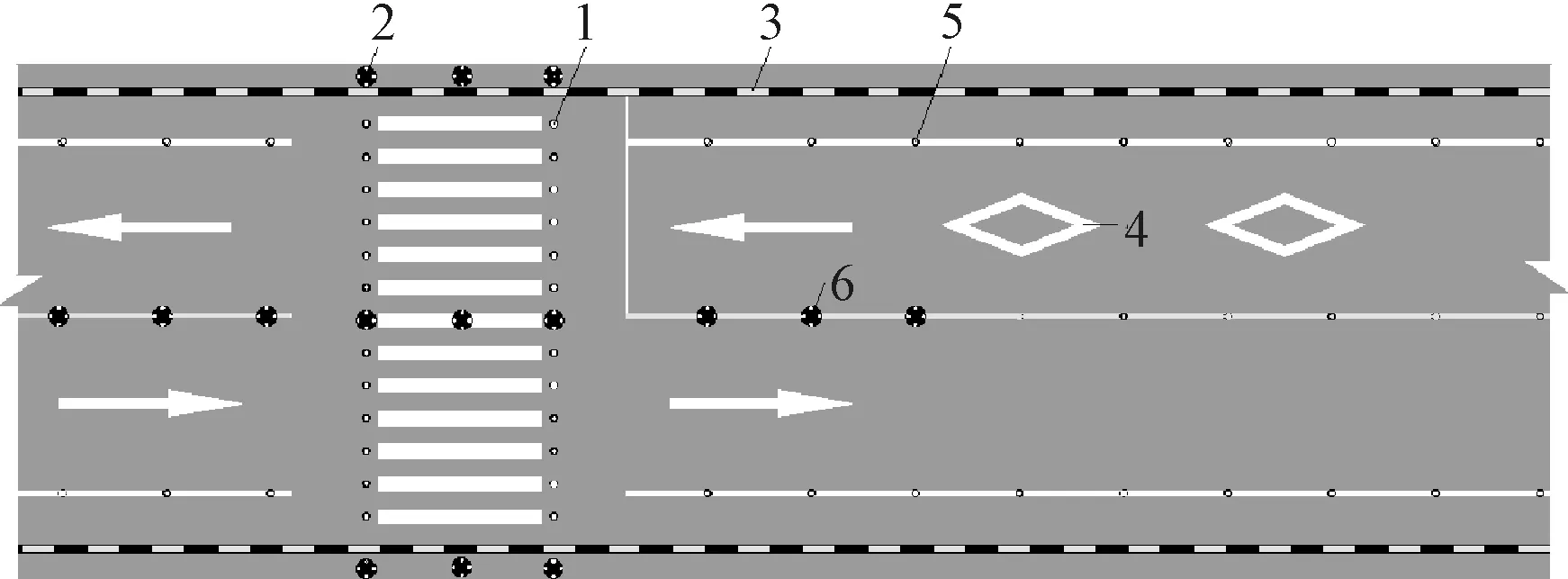
图2 平面设计图
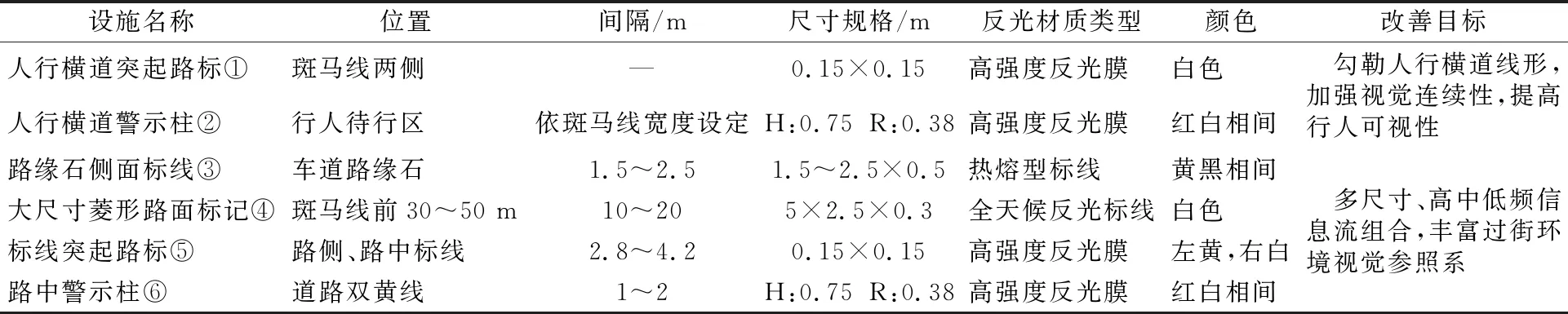
表2 城市过街路段安全改善设计方案信息
注:表中设施名称编号见图4;按照城市道路限速具体要求(40~60 km/h)确定设施实际布设间隔,双黄线上警示柱布设长度为设计道路最高限速的停车视距.
2 试验设计
2.1 试验原理
受城市过街路段管理等因素的限制,利用3ds Max软件构建仿真模型,并基于E-prime平台组织仿真试验.由于照度条件对驾驶员视觉特性影响较大,且驾驶员识别周边物体主要受行车速度和目标物状态的影响,因此试验以过街行人最危险状态,即低照度环境单个过街行人静止为试验条件,探索夜间不同行车速度条件下,过街环境改善前后驾驶员行车视距视区的变化规律.
考虑到驾驶新手及无相关夜间驾驶经验的驾驶员很少选择在夜间出行,为代表驾驶员夜间出行的总体特征,试验选择28名具备夜间驾驶经验的被试(男21人,女7人),驾驶员年龄在20~50 岁,各年龄段(20~30,>30~40,>40~50)人数分布均匀,正常视力在5.0以上且身体健康状况良好.
2.2 试验方法及试验指标
设计改善前后试验场景,并将行人模型分别置于当前车道和相邻车道前方斑马线上,驾驶员在指定的仿真视频速度条件下对行人进行视认,采集仿真试验中视认距离数据.采用视认距离衡量驾驶员的行车视距视区情况,视认距离是指驾驶员发现行人时刻人行横道与车辆之间的距离.行人位于当前车道和相邻车道条件下,驾驶员视认距离越长,说明改善设计方案提升视距、扩大视区效果越好.
3 行人视认试验
3.1 试验场景设计及试验流程
设计仿真场景为设计车速为60 km/h的双向四车道,依据城市道路照明设计标准[10],定义过街路段环境照度为照度15 lx,仿真视频速度变化区间为30~80 km/h,间隔为10 km/h.行人视认试验设计4个试验场景,记为场景1,2,3,4.场景1,2为改善前的城市过街路段,场景3,4为改善后的城市过街路段,其中场景1,3行人模型位于当前车道前方斑马线,场景2,4行人模型位于相邻车道前方斑马线.
试验流程为:①试验开始前,向被试者说明试验流程,为了尽量使被试按照个人驾驶习惯,不告知其试验目的,并随机选择某一试验场景,将该场景播放1 min视频供被试观看;②播放结束后,给予被试10 s准备时间后开始试验;③试验正式开始,播放仿真视频,起点为斑马线前300 m,按照预定的速度v匀速行驶,当被试视认出行人时,被试需立即按下计时器(该时刻记为t1),此时被试仍保持速度v匀速行驶,最后车辆匀速行驶到人行横道处模拟器记录时刻(该时刻记为t2);④计算视认距离S=v(t2-t1);⑤每完成一个试验场景,给予被试30 s休息时间;⑥被试者需要分别进行3组试验,间隔2 min后继续重复试验2次;⑦分析试验数据,取3组试验均值进行分析整理.
3.2 试验结果分析
结合张楠楠[11]基于驾驶员视认时间及照度模型得出的不同照度范围和限速条件下推荐的停车视距,低照度(光照强度为5~25 lx)、道路限速60 km/h情况下停车视距为111.380 m.采集并分析行人视认仿真试验数据,不同行车速度下改善前后视认距离见表3,视认距离分布见图3.
由表3及图3可知,得出主要结论如下:
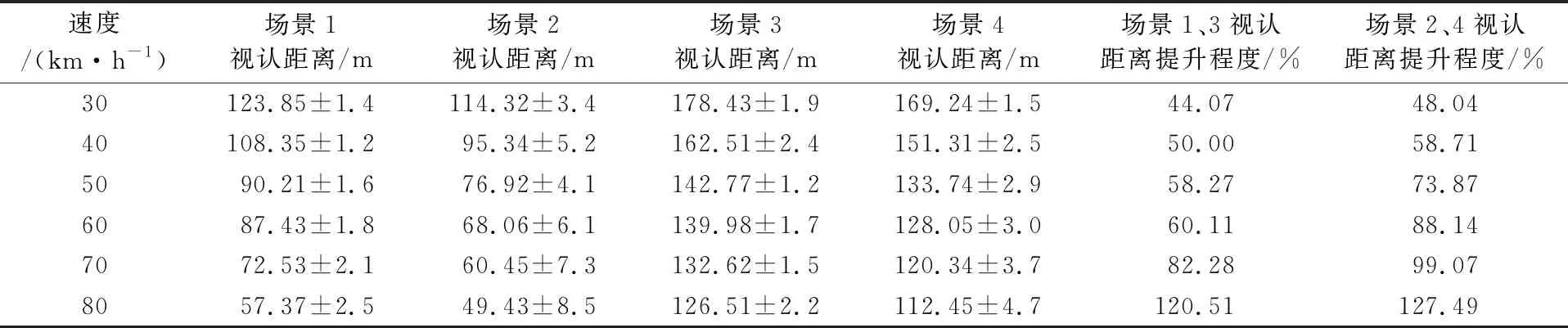
表3 视认距离
注:视认距离提升程度为改善前后视认距离的差值与改善前视认距离之间的比值.
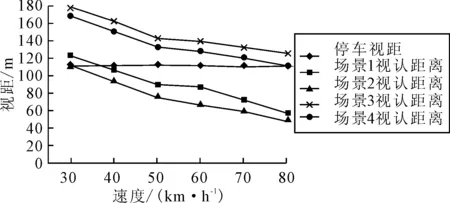
图3 视认距离分布
1) 行车视距影响分析 对比分析场景1和场景3的视认距离:场景1和场景3驾驶员视认距离均随速度增大呈现递减的趋势;场景1相比于场景3,驾驶员视认距离受速度变化影响更大,改善前,在试验行车场景速度为40~80 km/h条件下驾驶员视认距离小于试验场景的停车视距(111.380 m),改善后,不同行车速度条件下驾驶员视认距离均得到不同程度的提升,速度值愈大视距提升效果愈显著,其中行车速度为80 km/h时,驾驶员视认距离提升程度为120.51%,并且改善后不同行车速度条件下驾驶员视认距离均大于停车视距.将改善方案对视认距离进行单因素方差分析,其中,行车速度为自变量,视认距离为因变量,以0.05作为显著性水平,分析结果见表4.
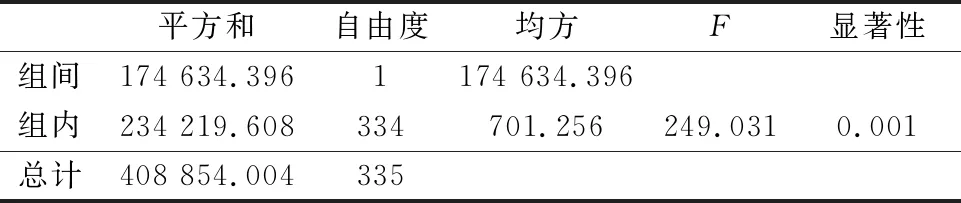
表4 改善方案对视认距离(场景1,3)的单因素方差分析
结果表明,采用改善设计方案后,驾驶员在不同行车速度条件下视认当前车道前方行人的距离发生显著性变化,行车视距得到有效提升.
2) 行车视区影响分析 对比分析场景2和场景4的视认距离,行车速度愈高,驾驶员视认出相邻车道前方斑马线行人的视认距离愈短,说明改善前后驾驶员视区均随行车速度增大而不断变窄,注视点逐渐引向景象中心.场景2相比于场景4,改善后,在试验行车场景速度为30~80 km/h条件下驾驶员视认距离均得到提升,速度值愈大视距提升效果愈显著,其中行车速度为80 km/h时,驾驶员视认距离提升程度为127.49%.将改善方案对视认距离进行单因素方差分析,其中,行车速度为自变量,视认距离为因变量,以0.05作为显著性水平,分析结果见表5.

表5 改善方案对视认距离(场景2,4)的单因素方差分析
结果表明,采用改善设计方案后,驾驶员在不同行车速度条件下视认相邻车道前方行人的距离发生显著性变化,行车视区进一步扩大.
4 结 语
1) 驾驶员在行车时有不同视标障碍物识别、道路环境判断、视神经调节等视觉任务,夜间条件下,由于环境照度低、色差对照减少的现实因素,驾驶员在心理上会更加紧张,在生理上出现反应时间增大、危险感知能力降低的现象.同时,夜间过街路段单调的视觉环境,缺乏足够的视觉参照系,易导致驾驶员产生视距视区不足、障碍物判识困难的问题.
2) 本文提出的改善设计方案通过丰富过街路段参照系可有效提升行车视距:改善前,在试验行车场景速度为30~80 km/h条件下,驾驶员视认距离基本小于试验场景的停车视距,改善后,驾驶员视认距离得到不同程度提升,速度值愈大视认距离提升效果愈显著,且改善后驾驶员视认距离均大于试验场景的推荐停车视距.
3) 驾驶员在夜间行车时存在视区随行车速度增大而不断变窄、注视点前移和引向景象中心的现象.采用改善设计方案后,在试验行车场景速度为30~80 km/h条件下,驾驶员可在更远的距离视认出位于景象周边(相邻车道前方斑马线)的行人,行车视距扩大,夜间过街安全性进一步提升.