基于车路协同的信号交叉口换道引导方法*
2020-06-03徐良杰陈国俊
王 涛 徐良杰 陈国俊
(武汉理工大学交通学院 武汉 430063)
0 引 言
针对车辆换道行为的问题,国内外学者开展了大量研究.Tanaka等[1]研究了高速公路上多车道混合交通流的车辆换道行为,发现道路上交通流密度决定了车辆的换道行为,且车辆换道会导致不同车道的交通流密度的显著变化;Ismail等[2]构建了基于排队长度的城市交叉口车辆换道模型;Sun等[3]构建了一种考虑驾驶员特性的城市道路自由换道模型;王啸啸等[4]构建了一种交叉口换道行为的Cox风险分析模型.但是这些换道模型的研究主要是基于驾驶员驾驶的前提下进行的,且缺乏考虑周围车辆的配合度.
近年来,随着无线通信以及互联网等技术的迅速发展,车路协同系统逐渐成为了智能交通发展的主要研究方向之一.车路协同系统是指基于无线通信、传感探测等技术获取车辆和道路信息,通过车车、车路通信进行信息交互和共享,实现车辆与基础设施之间智能协同与配合,达到优化利用系统资源、提高道路交通安全、缓解交通拥堵的目标[5].车路协同系统能全方位获取车辆个体的时空状态信息,为改善信号交叉口处车辆换道行为的安全性和高效性提供了技术基础和支持条件[6].Luo等[7]提出了一种基于车车通信的动态自动换道,以实现自动车道变换并消除车道变换过程中的潜在碰撞;He[8]提出了一种新的车路协同条件下的信号交叉口驾驶模型,并提出了该模型下的协同换道模型;Nilsson[9]提出了一种车道变换算法,所提出的方法通过简单地估计是否存在允许智能车安全地执行换道的纵向轨迹来选择适当的车辆间的间隙来执行车道变换操纵;Desiraju等[10]提出了一种通过优化安全车道变化的数量来最小化交通流的中断,从而提高吞吐量并减少拥塞的算法.
综上所示,现有的基于车路协同技术的换道模型的研究集中于高速公路背景下的换道行为,或者是在城市道路的路段上换道行为,在面向交通流量密度变化较大、交通环境更为复杂的信号交叉口处的换道行为方面的研究较少.鉴于此,本文将考虑在车车通信和车路通信之间均可以实现实时的信息交互的车路协同环境,换道车辆可以实时获取周围车辆及道路环境的动态信息的基础上,建立信号交叉口车辆换道引导方法和模型,为满足车辆在交叉口复杂多样的换道需求,减少车辆换道对交叉口通行效率的影响提供新的方案.
1 信号交叉口换道行为分析
1.1 信号交叉口换道行为特征分析
选取武汉市两个典型交叉口的三个方向进口道进行交通调查,并对调查数据进行预处理,得到换道车辆相关特性,见表1~3.

表1 调查地点信息
根据调查发现,在信号交叉口进口段,车辆换道行为发生较为普遍,绝大多数车辆在虚线区域内完成换道,少部分车辆在实线区域完成换道.此外,车辆的换道行为以强制性换道为主,选择性换道只占少数.
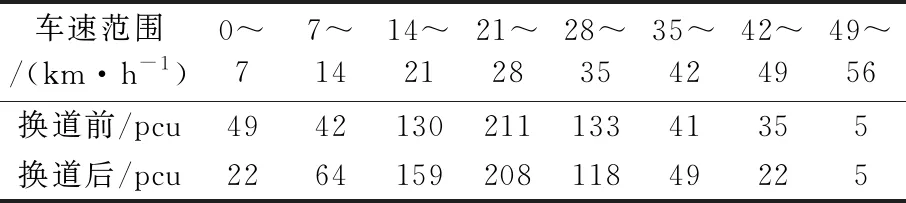
表2 交叉口进口段换道车辆车速范围统计
通过调查分析可知,换道前后换道车辆的行驶速度分布趋势大致相同,并没有明显的区别,换道车辆换道前后的行车速度区间在14~42 km/h的比例分别为79.9%和82.5%.此外,当不同车道的车流速度差值较小时,车辆变换车道过程中车速的变化程度较小,车辆所需换道时间较少.当交通流量密度增大或不同车道的车流速度差值较大时,驾驶员换道的难度增大,换道所需时间会逐渐增加.
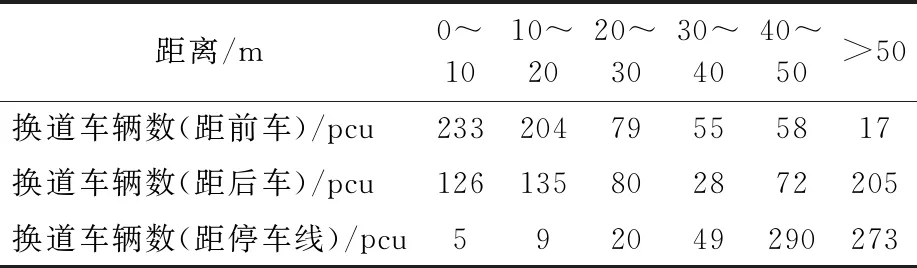
表3 交叉口进口段换道车辆换道位置分布统计
通过调查分析可知,接近70%的驾驶员在进行换道时,距离原车道前方车辆为0~20 m.接近53%的驾驶员在进行换道行为时,距离原车道后方车辆为0~30 m.接近87%的驾驶员在进行换道行为时,距离停车线的距离>40 m,且换道行为多发生在距离交叉口停车线50~150 m内.
1.2 信号交叉口换道条件
结合上述调查分析可以得知,车辆能否安全高效地完成换道,必须至少满足以下两个方面:①目标车道上必须有保证行驶安全的换道空间,使得换道车辆在驶入目标车道的过程中不与其他车辆发生碰撞,这方面取决于换道车辆周边相关车辆的行驶速度、车头间距以及换道时间;②换道车辆必须有充足的时间来安全高效完成换道行为,这方面更需要驾驶员能对周围交通环境信息有一个清晰准确的判断.
车辆在换道过程中,需要考虑原车道LO和目标车道LD两条车道,还需要考虑原车道的换道车辆Vi、原车道中换道车辆的前车VLO、目标车道前方车辆VLD及目标车道中的后车VFD,见图1.
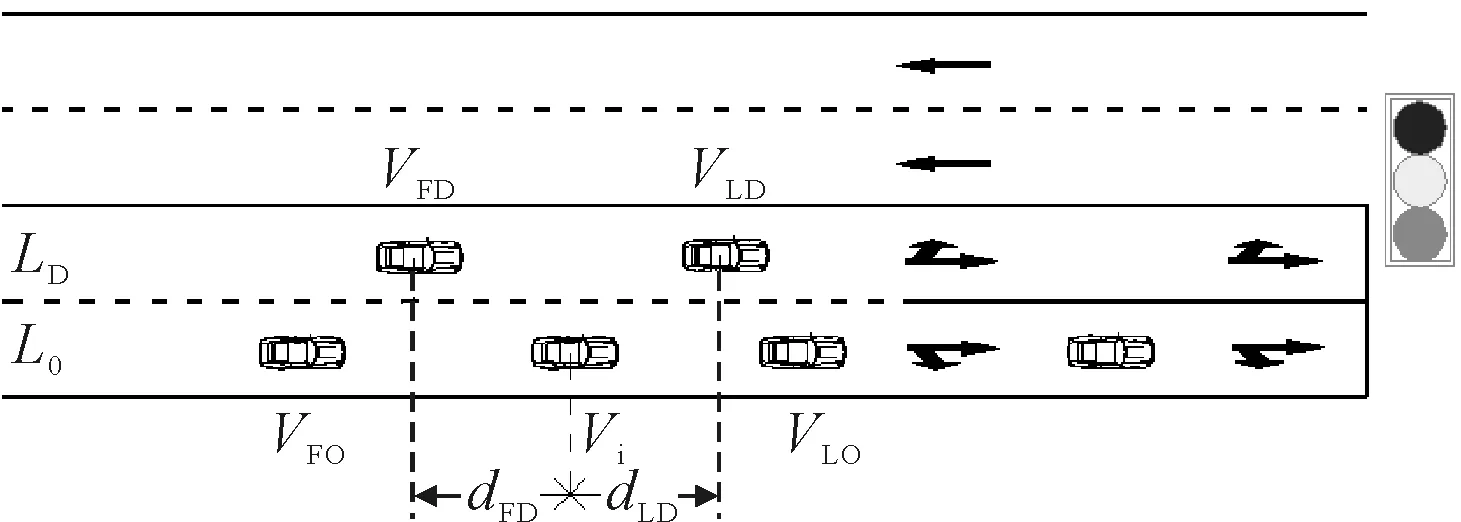
图1 信号交叉口进口道换道行为示意图
考虑车路协同环境下车辆具有实时通信的特点,换道车辆可以实时获取周边车辆的相关信息,通过分析车辆运行状态来判断换道条件.假设车路协同系统获取到的换道车辆Vi的位置为xi(t),换道车辆Vi的纵向加速度为ai(t),换道车辆的纵向车速为Vi(t),目标车道上后方与换道车辆产生冲突的车辆VFD位置为xFD(t),冲突车辆VFD的纵向加速度为aFD(t), 冲突车辆的纵向车速为VFD(t).
为了保证车辆换道的安全,避免发生碰撞条件为
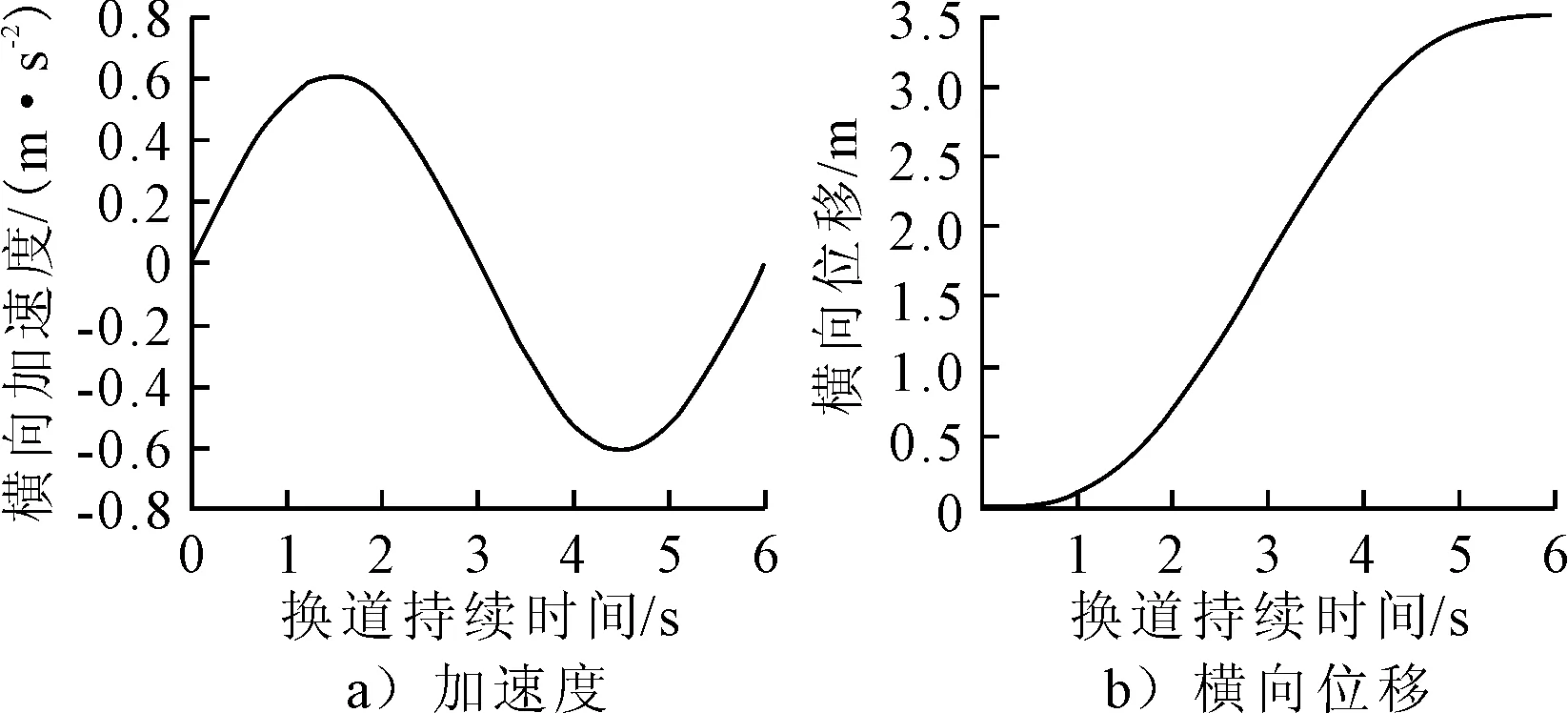
xFD(t)+L+Δx (1) 式中:L为车长;Δx为两车初始纵向距离;t0为换道车辆从换道过程开始所处位置行驶至临界碰撞点所需时间,tlat为换道持续时间. 则换道车辆Vi与目标车道上后车VFD之间的纵向距离S(t)为 S(t)=xi(t)-xFD(t)-L (2) 上述式(2)可以转化为 (vi(0)-vFD(0))t (3) 只要保证S(t)≥0则可以保证两车不会发生碰撞,可以得出车辆的最小换道距离为 (4) 同理分析换道车辆Vi与原车道前车VLO、换道车辆Vi与目标车道前车VLD的最小换道距离为 (5) (6) 式中:aLD(t)为目标车道前车VLD的纵向加速度;VLD(t)为目标车道前车VLD的纵向速度;aLO(t)为原车道前车VLO的纵向加速度;vLO(t)为原车道前车VLO的纵向速度. 考虑车路协同系统具有实时通信的功能,在信号交叉口未饱和状态下,车辆在距离交叉口停车线较远的距离开始就可以开始换道动作,车辆不会集中在交叉口虚实线连接段采取换道行为.因此,本文主要研究车辆在信号交叉口未饱和状态下进行强制性换道行为时的引导方法. 换道车辆换道引导的详细步骤如下: 步骤1当车辆有换道需求时,车辆首先需要确定周围交通环境是否满足换道的安全条件.如果不满足安全换道条件,则车辆继续沿原车道行驶;如果满足安全条件,则换道车辆Vi首先将通过车车通信将包含其自身时空位置以及速度的换道申请信息发送到目标车道中的后车VFD和目标车道前方车辆VLD,以便这些车辆可以及时调整运动状态,以适应换道车辆Vi的换道行为. 步骤2当周围车辆接受换道车辆Vi的换道请求信息后,换道车辆Vi便开始变换车道.如果换道车辆Vi开始变换车道,则换道车辆Vi就开始产生横向偏移,换道车辆Vi对原车道前车VLO的关注度逐渐下降,换道车辆的前车VLO对换道车辆Vi加速度的影响逐渐减小.与此同时,目标车道中的后车VFD和目标车道前方车辆VLD对换道车辆Vi的加速度影响逐渐增大.当换道车辆Vi的横向偏移量达到车道宽度的一半时,目标车道中的后车VFD对换道车辆Vi的加速度影响开始逐渐减少,而目标车道前方车辆VLD的对换道车辆Vi的影响则越来越大. 步骤3换道车辆Vi完成车道变换,跟随目标车道前方车辆VLD驶向交叉口.如果换道车辆Vi完成了换道行为,则换道车辆Vi行驶状态为变为跟随目标车道前方车辆VLD行驶,车辆加速度只受目标车道前方车辆VLD影响. 由于信号交叉口在一天内不同时段的流量变化较为明显,因此本文采用一个参数少、意义明确且在自由流条件下至拥堵流条件下均可以很好应用的IDM模型来描述换道车辆以及其周边车辆的跟驰行为.IDM模型中考虑了换道车辆和前车的速度差以及两车之间的距离,可以较好与上文中换道条件的判断相适应. 在IDM模型中,换道车辆Vi的加速度为 (7) (8) 式中:dmin为静止安全距离;T为安全时间间隔;β为换道车辆的舒适减速度. 通过相关研究可知,当换道车辆Vi从原车道LO到车道LD时,其变换过程的持续时间会受到车辆换道速度的影响.当车辆的换道时间固定的情况下,换道车辆Vi在变换车道过程中的横向加速度以及横向位移变化图见图2,表达式为 (9) (10) 式中:alat为换道车辆Vi横向加速度;H为车道宽度;tlat为换道车辆Vi的换道时间;ylat为换道车辆Vi的横向位移. 图2 换道车辆加速度和横向位移变化示意图 上述模型在大多数换道研究中被认为是简单而精确的模型.由图2可知,在换道过程开始时和换道过程结束时换道车辆Vi的横向加速度均为0,满足了换道的舒适度;换道过程的前半段时间内横向加速度为正,后半段时间内为负,变化较为连续,符合实际换道过程. 根据实际调查可知,车辆的行车速度区间主要是在14~42 km/h范围内,则换道车辆与冲突车辆的速度差值区间大小主要是在-5~5 m/s范围内.当换道车辆与冲突车辆的速度差值越大时,其换道条件就会增高所需要的换道时间越会增长.结合实际调查研究,换道持续时间tlat为 (11) 当换道车辆Vi从原车道LO变换到车道LD时,换道车辆的纵向加速度为 (12) (13) (14) η=1-λ-μylat(t)∈(0,H) (15) 在换道行为开始之前,换道车辆Vi的加速度只受原车道前车VLO的影响,此时λ的值为1.当换道车辆Vi开始变换车道的时候,原车道前车VLO的影响因子λ逐渐下降,换道车辆Vi的加速度开始受到目标车道前、后车VLD和VFD的影响,影响因子μ和η逐渐上升.当换道车辆Vi的横向偏移量达到车道宽度一半的时候,即换道车辆Vi的重心处在车道线的位置处时,可以认为原车道前车VLO对换道车辆Vi加速度影响减小为0,而目标车道前车VLD的影响因子μ仍会持续增大,而目标车道后车VFD的影响因子η也开始逐渐下降,在车道变换完成时目标车道前车VLD的影响因子μ增大为1,目标车道后车VFD影响因子η减少为0. 此外,当Vi在换道过程中时,目标车道中的后车VFD的加速度aFD以及原车道中的后车VFO的加速度aFO为 (16) (17) (18) (19) 结合实地调查数据,以一条单向双车道的信号交叉口进口道为对象,运用Matlab软件对车路协同条件下的信号交叉口换道控制方法进行实验验证.研究对象是信号交叉口进口道的16辆车,所有车辆均使用前文所提及的IDM模型和换道模型,交叉口停车线位于200 m位置处.假设有两条车道LO和LD,每条车道上运行8辆车.仿真实验持续14 s,场景1中车道LO和车道LD的流量密度分别为ρLO=100 veh/km和ρLD=67 veh/km,场景2中车道LO和车道LD的流量密度分别为ρLO=67 veh/km和ρLD=100 veh/km,车辆的加速度、速度和位置均以0.1 s的时间步长更新.车辆的初始速度为8 m/s,实验中的其他参数值见表4. 表4 仿真参数 针对不同场景下的车辆换道行为,本文通过Matlab仿真实验,得到不同场景下车辆的换道轨迹,见图3. 图3 不同场景下的车辆换道行驶轨迹图 由图3可知: 1) 从车辆换道过程准备期间开始,车道LD后车VFD开始逐渐调整自身车速,在保证自身行驶安全的前提下配合换道车辆Vi顺利完成换道过程.在场景1和场景2中,VFD调整幅度较小,车辆运行更为平稳,说明在本文换道引导方法条件下,换道准备过程为后续协同换道过程提供了良好的条件. 2) 换道车辆Vi从第6 s开始从车道LO变换到车道LD,换道过程中车辆Vi的速度受到VLO,VLD以及VFD的约束下,可以发现其速度变化均匀连续,并且未产生较剧烈的突变;由图4和图6中可知,在不同场景下,换道车辆Vi与目标车道上的VFD以及VLD的速度差会有所不同,速度差的增大会导致换道时间也会相应的增长,目标车道后车VFD有足够时间进行调整,保证了变道过程的安全高效. 3) 在两个场景下,车道LO中车辆VFO在换道车辆Vi的换道过程中逐渐开始调整运动状态,然后逐渐开始加速跟随车道LO中的前车VLO行驶,见图3a)和图3c).车道LD中车辆VFD在换道车辆Vi的换道过程中的后半段继续调整运动状态,开始跟随换道车辆Vi行驶,降低了因车辆换道而目标车道后方车辆的影响,见图3b)和图3d). 综合看来,换道车辆无论是从高流量密度的车道变换到低流量密度的车道,还是从低流量密度的车道变换到高流量密度的车道,本文所提出的换道引导方法和换道模型提高了换道车辆与周边车辆的进行协同换道的能力,同时提高了整个换道过程的安全性和平稳性,减少了车辆换道对信号交叉口通行效率的影响. 为了改善信号交叉口进口道区域的换道效率和安全性,论文对信号交叉口换道行为进行了分析,提出了基于车路协同的信号交叉口换道引导方法,并建立了交叉口车辆换道的换道模型,并利用Matlab软件对所提出的换道引导方法以及换道模型进行仿真实验.结果表明,本文所提出的引导方法和模型可以提高车辆协同换道的能力和车辆变换车道的安全性和平稳性. 本文未考虑不同类型的车辆对车辆变换车道的影响,同时,对于多车道情况下车辆需要进行多次连续变道的情况也未做充分考虑.上述问题将在未来的工作中做进一步的研究,同时也将继续对本文所提出的方法和模型修改和完善.2 车路协同条件下信号交叉口换道引导模型
2.1 车路协同条件下换道引导方法
2.2 车路协同条件下换道模型



3 仿真分析
3.1 实验方案

3.2 实验结果及分析

4 结 束 语