基于ECSS标准的航天器姿轨控系统内1553B总线数据协议设计*
2020-05-27蒋志雄王玉爽傅秀涛谢鸣宇
蒋志雄,王玉爽,顾 斌,傅秀涛,朱 琦,谢鸣宇
0 引 言
国外航天器姿态轨道控制系统中广泛应用基于1553B总线的体系结构,如Lockheed Martin公司的LM900平台,国内航天器姿轨控系统随着近年来智能自主功能拓展和控制性能指标提升,已开始在遥感和空间站等领域航天器应用基于1553B内总线的体系结构[1-3].在实际应用中,各航天器姿态轨道控制系统内部数据总线仅采用了GJB289A-97链路基本层和物理层协议,该协议使用复杂,缺乏应用层标准[4-5],导致:①可集成性差,不同航天器上应用的单机数据协议不一致,无法直接集成;②可扩展性差,已有系统难以新增单机RT或融入整星大系统;③通用性差,各航天器星载设备和软件需要重复研制.
针对上述问题,欧洲航天局(ESA)的航天标准化组织(ECSS)从20世纪90年代开始研究空间数据标准化,2003年发布了ECSS-E-70-41A PUS(packet utilization standard)数据包应用标准协议第2版[6],2008年发布了ECSS-E-ST-50-13C 1553B协议标准[7].其中,PUS标准首次规定了遥控遥测数据包协议标准,国际空间数据系统咨询委员会已将其纳入到CCSDSS标准中[8];1553B协议标准作为MIL-STD-1553B基本协议的补充,在链路基本层协议上提供了面向用户的服务标准[9].ESA规定后续所有航天器必须强制应用该标准协议[10].国内已开展了ECSS数据协议的研究和应用,提出并设计了适应于我国航天器特点的综合电子系统业务及协议,使得整星级1553B数据总线协议国际标准化[9-11].
本文基于ECSS标准协议,对其在姿轨控系统内1553B总线上的扩展应用进行了研究和设计,有助于实现姿态轨道控制系统内1553B总线数据协议的标准化.
1 ECSS星载数据协议标准介绍
1.1 PUS包应用标准
ECSS PUS包应用标准(ECSS-E-70-41A)定义了地面和航天器之间的应用层级别的接口,用来满足电气组装、测试及飞行操作的需求.该标准主要包括:(1)描述了地面对航天器监视和操作的基本需求;(2)定义16类业务,满足地面标准化操作的需要[6].
ECSS PUS标准中定义的16种通用业务包括:(1)遥控确认业务;(2)设备指令分发业务;(3)事务和诊断数据报告业务;(4)参数统计报告业务;(5)事件报告业务;(6)内存管理业务;(7)功能管理业务;(8)时间管理业务;(9)操作调度业务;(10)监视业务;(11)大数据传输业务;(12)包传送控制业务;(13)存储和获取业务;(14)测试业务;(15)操作程序业务;(16)时间-动作业务.每类业务都保护若干子业务,航天器应用时,可根据需求对上述业务以及子业务进行选择和裁剪.
PUS在CCSDS标准定义的空间包格式基础上,规定了每种业务对应的数据域,定义了空间遥控包和遥测包的数据域副导头和应用数据的格式.PUS将CCSDS空间包中可选的包副导头区域定义为各类业务格式,要求该区域必选,其中业务与子业务的组合用(X,Y)表示,X和Y分别表示业务类型和子业务类型,业务组合代表了PUS的某一具体子子业务,与实际空间数据包相对应.PUS定义的遥测包和遥控包的数据域副导头结构如表1和表2.

表1 ECSS PUS 遥测包数据域副导头结构

表2 ECSS PUS 遥控包数据域副导头结构
1.2 1553B总线协议标准
ECSS-E-ST-50-13C总线协议标准在美军标1553B协议基础上,提供了5种上层接口服务,分别为:时间服务、通信同步服务、置数/取数服务、数据块传输服务以及终端管理服务,并以原语方式说明了各项服务的交互信息和时序逻辑,同时给出了子地址编排和方式码消息使用建议[7].5种服务定义如下:
1)时间服务:用于BC周期性给终端RT授时,除分发时间码外,还可发布时间同步.
2)通信同步服务:用于总线上各设备数据通信的同步,确保所有的通信消息在确定的通信帧内.该服务将约定的时间周期定义为一个通信帧周期,BC每个通信帧以同步消息与各RT同步,保证了协议的实时性.该服务为精确划分总线数据传输时序和合理均衡总线资源提供了条件.
3)置数/取数服务:用于传输预先分配好的固定长度数据,该服务支持无握手、无确认的数据传输.置数服务用于BC至RT的数据传输,取数服务用于RT至BC的数据传输.
4)数据块传输服务:用于传输可变大小的数据块,该服务支持有握手、有确认的数据传输,包括BC至RT的数据块分发传输和 RT 至BC的数据块获取传输.
5)终端管理服务:用于BC管理各终端RT,提供RT健康管理、监视、报警通知、终端配置以及数据卷绕标准功能.
这5种服务相互联系,通信同步服务为协议要求的强制服务,保证了协议的实时性并用于其他服务,终端管理服务依赖于置数和取数服务,时间服务、置数和取数服务以及数据块传输服务依赖于通信同步服务,各服务之间的关系如图1所示[9].
2 姿态轨道控制系统内1553总线数据协议体系结构设计
2.1 系统总线拓扑结构
姿态轨道控制系统由控制器、敏感器和执行机构3部分组成,其中控制器作为核心,采集各类姿态敏感器的测量数据,按设计的控制律计算出期望的控制指令,输出至执行机构产品,完成航天器姿态轨道控制任务.
基于1553B内部总线体系结构的姿态轨道控制系统总线拓扑图如图2,其中控制器为控制计算机,作为BC端;敏感器RT包括:红外地球敏感器、星敏感器和陀螺等部件;执行机构RT包括:驱动控制装置、控制力矩陀螺和帆板驱动装置等部件.采用虚线表示的为姿态轨道控制系统控制器与数据管理系统的数据管理计算机通过外部总线连接,传输遥测数据和遥控指令.
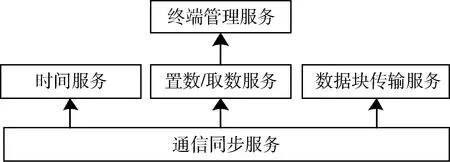
图1 5种服务关系
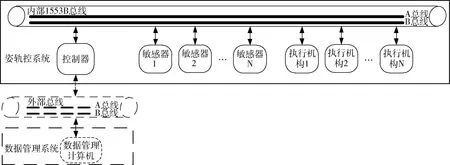
图2 基于1553B内部总线体系结构的姿态轨道控制系统拓扑结构图
2.2 总线数据包业务需求分析
通过对遥感、导航、通信等多个领域航天器姿态轨道控制系统总线数据业务进行需求分析,可以归纳出总线数据业务通用需求包括9项顶层功能,分别为:闭环控制数据业务、部件状态遥测获取业务、部件指令分发业务、部件内存管理业务、部件程序修改业务、部件时间管理业务、部件事件报告业务、控制器重要数据保存恢复业务、以及总线管理业务.
1)闭环控制数据业务:控制器完成姿态闭环控制计算用的数据包,包括各类敏感器数据包、执行机构数据包和执行机构指令包,如星敏感器的姿态信息数据包、控制力矩陀螺的框架角速度控制指令包等.
2)部件状态遥测获取业务:控制器获取各类部件的状态遥测数据,如星敏感器的状态遥测包等.
3)部件指令分发业务:用于操作部件,包括各部件状态设置指令包.
4)部件内存管理业务:用于各部件的内存修改和内存读出.
5)部件程序修改业务:用于对复杂单机如星敏感器的程序进行在轨修改.
6)部件时间管理业务:将控制器时间分发至各部件.
7)部件事件报告业务:部件将在轨运行中的重要或异常事件报告至控制器.
8)控制器重要数据保持恢复业务:为保证姿态安全,控制器将自身运行过程中的关键参数作为重要数据保存在部件,复位或切机时恢复.
9)总线管理业务:包括各部件总线同步、RT健康监测以及总线连接测试.
上述业务中闭环控制业务和控制器重要数据保存恢复业务为姿态轨道控制系统特有数据业务功能,其余7项业务为航天器共性数据业务,在整星数据管理系统中应用广泛.9类通用业务涉及到的总线数据包和数据流向见表3.需要说明的是,部件内存管理业务、部件程序修改业务、部件事件报告业务和控制器重要数据保持恢复业务为复杂单机产品具备的功能,该类单机一般采用TSC695、DSP等高性能处理器,如星敏感器产品、控制力矩陀螺产品等.
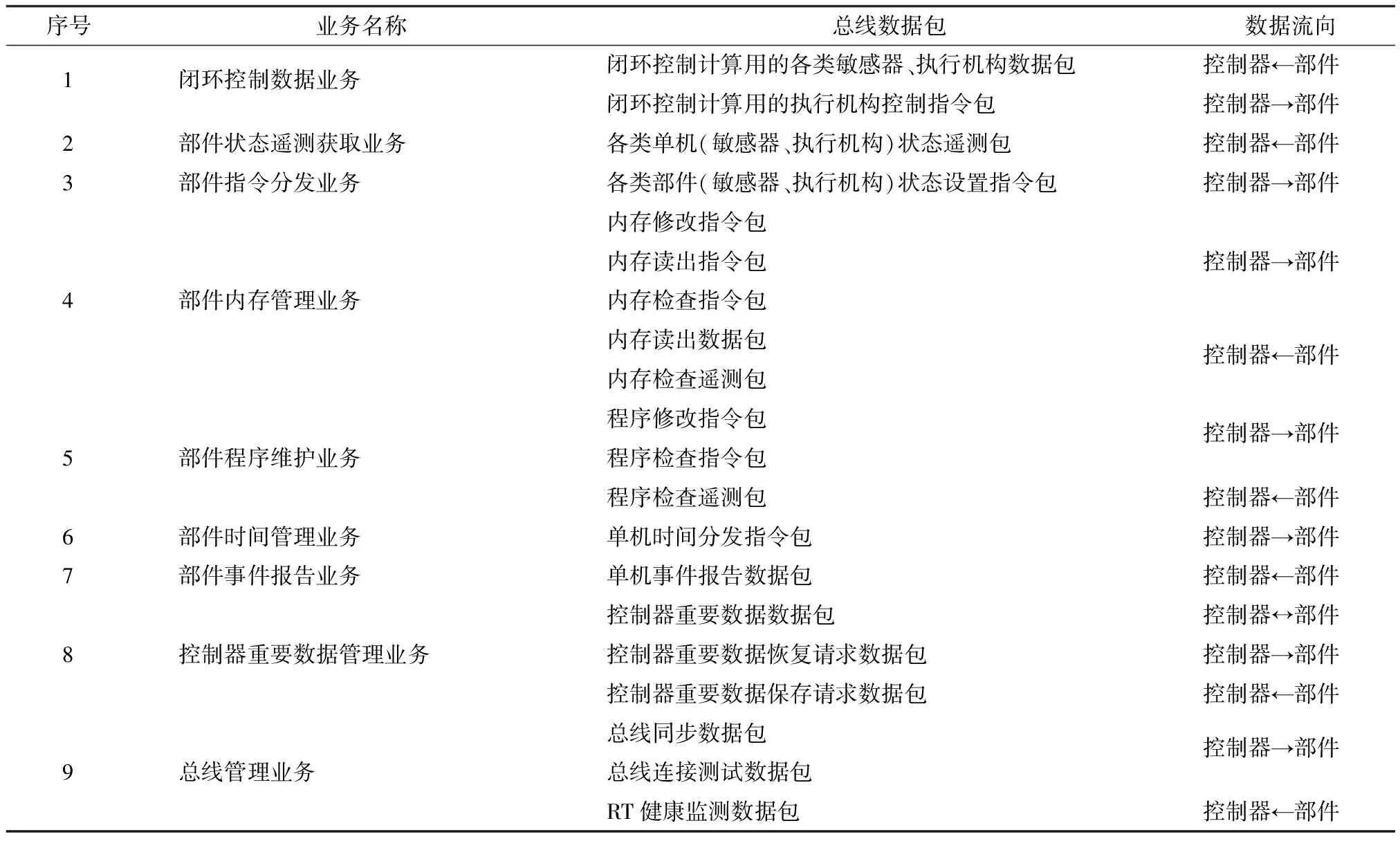
表3 总线数据业务表
2.3 总线数据通讯协议体系结构
根据姿态轨道控制系统数据包业务需求分析,结合ECSS星载数据系统协议规范,将姿态轨道控制系统总线数据通讯协议体系结构分为4层,如图3所示,依次为物理层、数据链路层、应用支持层和应用层,除物理层外,其余3层应用标准协议,实现总线数据业务和底层协议良好分离.针对当前各型号应用时定制的链路层协议和应用支持层协议,引入ECSS标准进行规范.数据链路层协议分为基本层和服务层两层:在GJB 289A-97(对应美军标MIL-STD-1553B)基本接口协议基础上引入面向“服务”的ECSS总线协议,直接面向应用.应用支持层引入ECSS PUS协议,规范姿态轨道控制 系统各项数据业务.
采用该基于ECSS标准的总线通讯体系结构,航天器姿态轨道控制系统内部总线通讯实现了标准化,并具有良好的可扩展性,大大提升了姿态轨道控制系统的可集成性.按该协议实现的各类部件产品既可接入姿态轨道控制 系统,也可无缝接入综合电子体系结构的航天器,实现了整星数据通讯协议的统一,便于未来实现航天器内设备的互连.
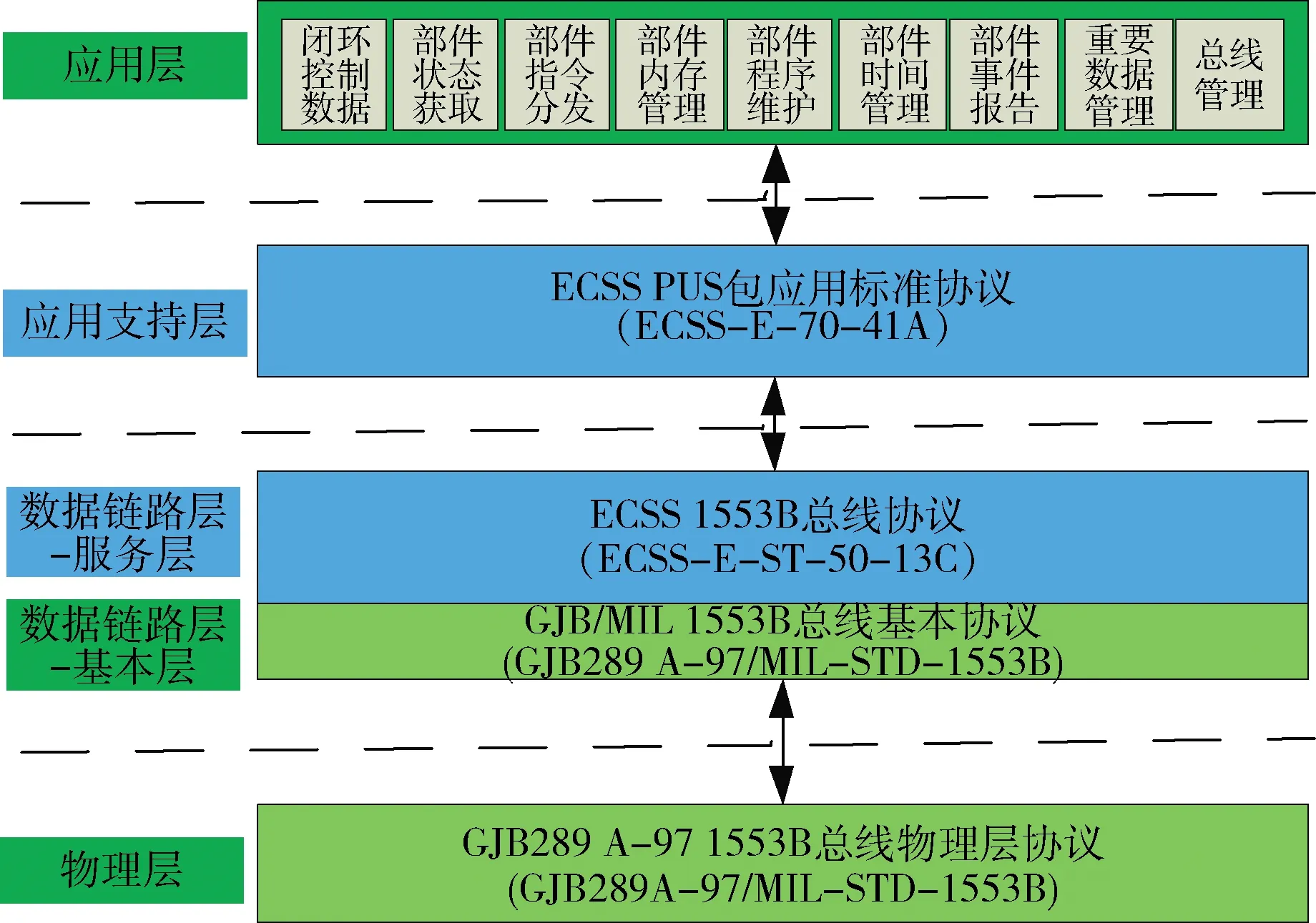
图3 姿态轨道控制总线通讯协议体系结构
3 应用支持层协议设计
3.1 各类数据包业务设计
姿态轨道控制系统9类总线数据包业务中,控制器重要数据管理业务、总线管理业务以及部件指令分发业务中的参数指令子业务为在ECSS PUS协议规范上的自定义扩展业务,其他业务均对应ECSS协议规范的标准子业务.9类总线数据包业务与PUS业务的对应表见表4,表中子业务编号(X,Y)对应PUS协议规范,X为业务编号,Y为子业务编号.

表4 姿态轨道控制系统总线数据包业务与PUS业务对应表
3.2 数据包格式设计
根据姿态轨道控制系统内部1553B总线上9类业务数据包特点,按照PUS包格式标准[6]和 CCSDS空间包标准[12],兼顾实用、可靠和可扩展性,将姿态轨道控制系统遥测数据包和遥控数据包格式统一定义为图4所示,由包主导头+包数据域两部分组成.其中:包主导头结构与CCSDSS标准一致,为6字节包头,通过应用进程标识符APID定义姿态轨道控制系统具体业务数据包,APID由部件RT(5bit)+包标识符(6bit)组成;数据域副导头按PUS标准定义,由业务类型+业务子类型2字节组成;数据域结构包括2字节的包差错控制域,用于包数据校验,采用ISO 8473-1:1998校验算法,确保总线数据可靠应用.
该数据包格式定义的优势如下:
(1)标准化程度高.符合CCSDS空间包标准和PUS标准;
(2)传输效率高.通过对标准的可选部分根据姿态轨道控制系统特点进行定义,数据域副导头只保留PUS要求必须存在的业务类型和业务子类型,减少副导头字节数,确保各数据包包头字节数少,传输高效;
(3)可靠性高.遥测包和遥控包均定义标准算法的差错控制域,确保控制器和部分可靠应用总线数据;
(4)可扩展性好.通过定义APID字段,可接入姿态轨道控制系统不同的部件RT,自定义业务类型,可扩展姿态轨道控制系统新的业务需求.

图4 姿态轨道控制系统遥测包和遥控包包格式
4 链路服务层协议设计
4.1 各类数据包服务应用
姿态轨道控制系统控制器核心功能为“在设计的控制周期(如125 ms)内完成姿态、轨道计算和控制任务”,具有高实时性和可靠性特点,总线数据通讯作为实现该任务的功能模块,各类总线数据包需要根据ECSS-E-ST-50-13C协议5类服务的特点开展针对性设计.采用如下原则设计各数据包总线协议对应的服务:
1)对于严格时序且实时性要求高的数据包,如闭环控制计算用的敏感器、执行机构遥测包等,采用简单高效的取数/置数服务协议;
2)复杂单机产品具有的部件内存管理业务、部件程序修改业务、部件事件报告业务和控制器重要数据保持恢复业务,为突发或慢周期的数据量较大(大于32字)的数据包,采用通用性好的数据块传输服务协议;
3)对于部件状态遥测获取业务和指令分发业务数据包,为兼容简单单机产品(如红外地球敏感器)和复杂单机,采用实现较简单的取数/置数服务协议;
4)总线管理业务中的同步数据包采用总线同步服务、监视数据包采用总线管理服务.
根据上述原则,姿态轨道控制系统内部总线数据包应用的标准协议服务如表5.

续表
4.2 各类服务消息设计
ECSS 1553B标准协议应用于姿态轨道控制系统内部总线通讯时,需要结合控制器和各部件任务特点,对各项服务开展如下具体设计:
1)通信同步服务的通信帧周期设置时,保持与控制器完成姿态轨道控制任务设计的控制周期一致,用于BC与RT的通信同步,保证了通讯的实时性.通信同步消息数据格式与标准一致,采用带数据字的方式命令进行同步(方式代码17),数据字为通讯帧号.
2)简化时间服务协议,采用“一步方式”,即仅发送标准中规定的时间消息而不发送时间同步消息,时间周期设置为控制周期的N倍,一般取1 s,一个时间周期内的通信同步消息总帧数为1 s内控制周期个数.
3)取数/置数服务的消息数据字数要求不大于32字,确保各部件RT实现简单.
4)数据块传输服务应用时,采用标准定义的高效率QoS块分发业务,对于数据正确性的检验需由RT端服务用户通过上层措施保证,保证总线数据实时性.子地址采用“Flat”子地址方案,不同的子地址用于传输数据块的不同段,从子地址11开始,数据块最大传输长度为1024字节.
5)终端管理服务中的RT健康及监测服务、数据卷绕服务保持与标准一致,其中RT健康及监测服务各终端仅实现RT健康数据报告功能.
4.3 终端RT子地址设计
姿态轨道控制系统部件RT子地址设计如表6所示,各部件RT端子地址设计时,ECSS-E-ST-50-13C协议要求的子地址保持与标准一致,对于采用取数/置数服务的数据包,规定子地址2~6为闭环控制计算用到的数据包,子地址7~10为其它数据包,可以满足姿态轨道控制系统各类单机RT子地址配置要求.

表6 终端RT子地址配置表
5 应用情况
某敏捷机动遥感卫星姿态轨道控制系统采用二级1553B总线架构,外部1553B总线与数据管理系统中的数据管理计算机通讯,内部1553B总线用于控制计算机与各部件RT通讯,姿态轨道控制系统内共有25个部件RT,涵盖了红外敏感器、陀螺、星敏感器、控制力矩陀螺和驱动控制单元产品.
该项目初期在外部1553B协议上应用了ECSS PUS和1553B总线标准,获得了良好的应用效果.在此基础上,将外总线上的应用成果按本文提出的协议在姿态轨道控制系统内部进行了初步移植和测试验证,结果表明:该协议能满足姿态轨道控制系统完成姿态与轨道控制功能要求的内部BC与RT之间通讯协议要求,协议标准化程度、可集成性和可扩展性大大提高,与外部1553B数据总线通讯协议做到了无缝衔接.
6 结 论
国内姿态轨道控制系统内1553B数据总线上层协议未实现标准化的弊端日益凸显,制约姿态轨道控制系统的快速发展.本文设计的姿态轨道控制内1553B总线数据协议,基于ECSS标准,规范了总线数据包业务,统一了数据应用支持层和数据链路服务层协议,实现了姿态轨道控制系统内1553B总线数据协议国际标准化,提升了姿态轨道控制系统可集成性、可扩展性和星载设备的通用化,并为后续融入整星综合电子系统奠定了基础,显著提高了姿态轨道控制系统研制效益.