基于蝙蝠飞行的仿生智能卫星编队管理策略*
2020-05-27马雨萌
侯 锐,张 驰,苗 峻,马雨萌
0 引 言
由多颗卫星组成的卫星编队可以完成单颗航天器难以完成的空间任务,具有性能好、功能多和适应性强的特点[1],卫星编队在对地观测、天文观测及深空探测等领域具有重大应用前景,是未来航天任务的关键技术[2-4].
卫星编队飞行的实现依赖于对卫星编队构型的控制.目前针对编队队形保持策略的研究大部分集中在主从式的结构上,将某颗卫星作为编队系统的主星,其余卫星作为从星跟踪主星的参考轨道.这种控制方式易于实现,但如果主星受到摄动等因素的影响偏离参考轨道的话,整个队形也会发生变化[5].目前针对编队控制,文献中常见的方法有开环控制[6-7],鲁棒控制、LQR方法、模糊控制[8]、Lyapunov方法以及滑模变结构控制[9]等,存在控制精度不高或者控制策略较复杂的问题,难以应用.
生物群集行为在自然界中是一种普遍现象,生物群体通过遵循简单的行为规则,却能够有序的相互协作完成复杂的团队活动[10-11].生物群体既能形成协调有序的集体运动模式,又能针对外界环境变化做出高效灵活的决策.为进一步降低编队卫星的运行与管理成本,提高编队控制的效率和灵活性,本文受自然界中蝙蝠飞行的行为规律启发,提出了仿生智能理论应用于高精度编队控制,它可以有效协调编队中各卫星的目标,以实现编队构型整体和局部的高精度统一协调,提高编队系统的智能决策能力,从而充分地发挥卫星编队的优势,实现高效高精度卫星编队.
1 编队控制理论
1.1 小卫星相对运动模型
卫星轨道分析中,若不考虑其他天体及摄动力的影响,将地球与卫星假设成一个质点来分析卫星的运动称为二体问题.二体问题反映着卫星运动的最重要的特性.
根据牛顿万有引力公式可以得到描述卫星相对地球的二体问题基本方程[12]:
(1)
卫星轨道动力学运动方程如下:
(2)
μ为地球引力常数,约为3.986004418×1014m3/s2,x、y、z、vx、vy、vz分别为卫星的位置和速度,r为卫星位置矢量长度.
编队卫星间的相对运动分析是编队控制的基础,要研究卫星的运动特性,必须建立准确的卫星相对运动模型.本文采用目前应用成熟的C-W方程来建立卫星相对动力学模型[13].分析两个卫星相对运动,如下图,其中一个为卫星S,另一个是卫星F.
相对运动的坐标系采用卫星S的轨道坐标系,x轴指向卫星S的运动方向,y轴垂直于轨道平面,z轴指向地心.在此坐标系中第i颗卫星的三轴位置表示为xi∈R3,速度表示为vi∈R3,经过相关的分析推导可以得到描述卫星运动的C-W方程如下:

(3)
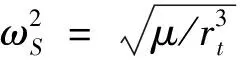
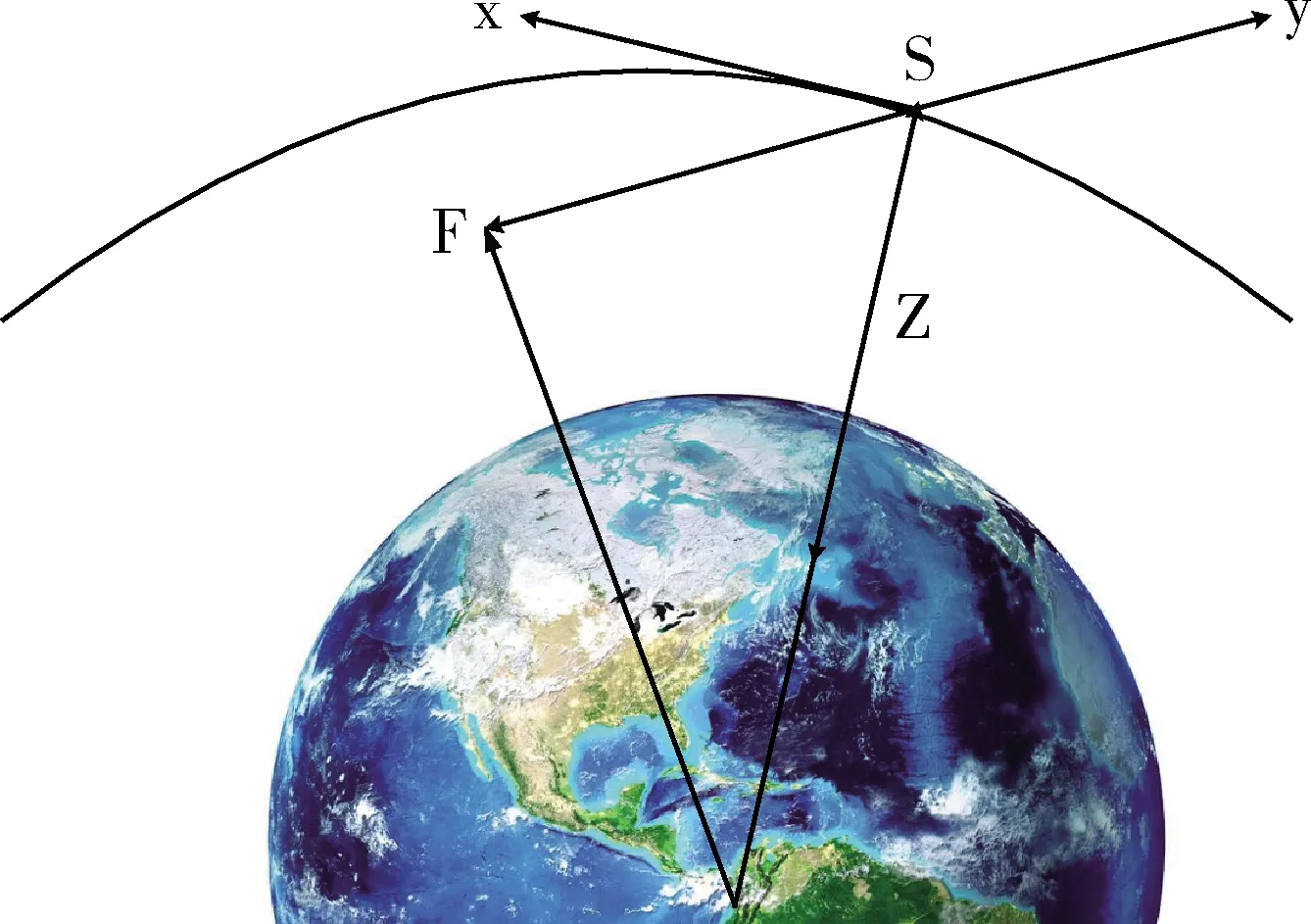
图1 卫星运动示意图

(4)
其中
(4)
1.2 拓扑图论
仿生卫星编队一致性控制通过引入图论的思想进行分析,利用图来表示卫星间的信息拓扑关系.在图论理论中,图中的每一个节点代表一颗卫星,而各节点之间的通信与感知关系作为图的边.

(5)
Laplacian矩阵L是对称半正定的.无论在无向图还是有向图中,Laplacian矩阵的特征值都含有零,Laplacian矩阵的性质是分析编队控制性能的重要工具.
2 蝙蝠飞行数学建模
蝙蝠可以对自身发出的回声进行分析,判断物体性质,当他们接近物体时,频率会降低,声波速度增大.根据蝙蝠回声定位理论给出如下蝙蝠仿生模式[17]:
(1)蝙蝠运用回声定位感应距离,感知猎物;
(2)蝙蝠以固定频率、可变化脉冲频率(波长)和响度Ω0搜索猎物,根据回声波判断猎物与自己的距离,蝙蝠可以自动的调整发射的脉冲频率和响度.
蝙蝠在飞行搜寻猎物时,正常飞行时发射脉冲的频度较低而响度较大,一旦发现了猎物,就逐渐减小脉冲响度而增加脉冲频率.对蝙蝠飞行的机理进行如下数学定义:
蝙蝠飞行搜寻猎物时使用的脉冲频率为
fi=fmin+(fmax-fmin)β
(6)
式中,fi是第i只蝙蝠发出的脉冲频率,其脉冲区间为[fmin,fmax],β为[0,1]上的随机向量.
蝙蝠飞行速度:
(7)

蝙蝠空间位置
(8)
当蝙蝠群体在飞行过程中,通过发射脉冲响度和脉冲频率的变化,传递猎物信息,使得较劣位置的蝙蝠逐渐向靠近猎物较优的位置移动,协调蝙蝠编队飞行.
3 仿生编队管理策略
3.1 虚拟中心设计
卫星组网编队需要确定编队飞行目标,为了明确个体飞行状态和整体编队飞行的关系,需要一个“编队中心”或“虚拟中心”去衡量编队的整体状态.本文以经典的卫星编队构型为例如图2所示.将编队卫星组成的三角形形心O作为虚拟中心,这样设计虚拟中心求解简洁方便,计算没有引入非线性,同时具有全面性,虚拟中心包含了所有卫星的状态信息,反映了编队构型整体的变化.有了虚拟中心的这个“虚拟全局衡量指标”,可以引入仿生计算策略.
图2 编队构型结构图
3.2 蝙蝠仿生编队策略
引入一致性协调控制的相关思想,定义带虚拟中心的编队综合误差衡量编队构型状态,设计第i颗卫星的综合误差由个体位置一致误差、个体速度一致误差和虚拟中心误差组成,通过与拓扑相连的卫星进行通信,将位置、速度误差结合成为一致误差,再结合虚拟中心误差,既保证各星误差收敛一致,保证编队构型,也保证虚拟中心误差收敛,保证编队沿期望轨道飞行.编队综合误差定义为:
(9)


基于蝙蝠仿生的编队飞行策略重点是协调卫星个体和编队整体的关系,即处理好编队整体效益和卫星个体效益的关系.编队整体精度和能耗作为整体效益,个体效益为卫星个体的精度和卫星个体的消耗.如果整体效益很差,个体效益的维持和提高就很困难.卫星个体效益是整体效益的基础,没有个体效益的提高,整体效益的提高也是难以实现的.个体效益和整体效益是统一的,有时又是矛盾的,蝙蝠仿生编队的一个重要目的就是通过仿生智能决策,实现个体效益和整体效益的平衡.
结合蝙蝠飞行的机理,将卫星编队管理分为正常飞行模式和猎物飞行模式.
(1)正常飞行

(10)
(2)猎物飞行模式
将虚拟中心精度看做“猎物”,一旦蝙蝠发现猎物,即整体精度相差较大,需要强调整体,减小脉冲响度,放大整体效益,体现整体效益.
(11)
ε为小于0的常数.此时脉冲响度更新
(12)
总误差向量为
(13)

(14)
总误差向量的导数为
(15)

(16)
因此系统可整理为
(17)
因此可设计无限时间的状态调节器使系统可控或可镇定.选择如下性能指标
(18)
其中,Q和R为常数对称正定矩阵.使J取极小值时最优控制为
u=-R-1BTKe=-Ge
(19)
其中K∈R3n×3n为正定对称矩阵,并且满足如下Riccati方程:
(20)
4 仿真验证及分析
(1)轨道参数
虚拟中心轨道采用的太阳同步轨道,卫星交点地方时选择为上午6时,卫星初始位置的轨道根数分别为:半长轴a=7 126.4365 km,偏心率e=0.00115,轨道倾角i=98.4110°,近地点幅角ω=90°.
(2)卫星参数
编队卫星外形为:20 cm长,质量为1 kg的立方体卫星,考虑地球扁率、大气阻力、太阳光压、日月引力摄动因素,大气阻尼选Jacchia-Roberts大气模型,其中Cd=2.2,太阳光压为Cylindrical,采用RKF7(8)积分算法进行数值积分.编队构型整体在太阳同步轨道上运动,编队卫星内部轨道面与太阳同步轨道面成30°夹角.编队半径500 m,3颗相位相差120°.两种控制策略仿真初始环境一致,期望编队平均误差小于0.3 m,控制矩阵Q=I,其中的R参数选定为8.5,ε=-300,fmin=0,fmax=20.
采用基于蝙蝠的卫星编队仿生智能控制算法对于3颗编队卫星进行控制,其相对运动轨迹如图3所示.图3显示了3颗编队从星在以编队虚拟中心为基准的坐标系中的运动轨迹.3颗卫星的运行轨迹均为圆形,相位差为120°,构成稳定的等边三角形.
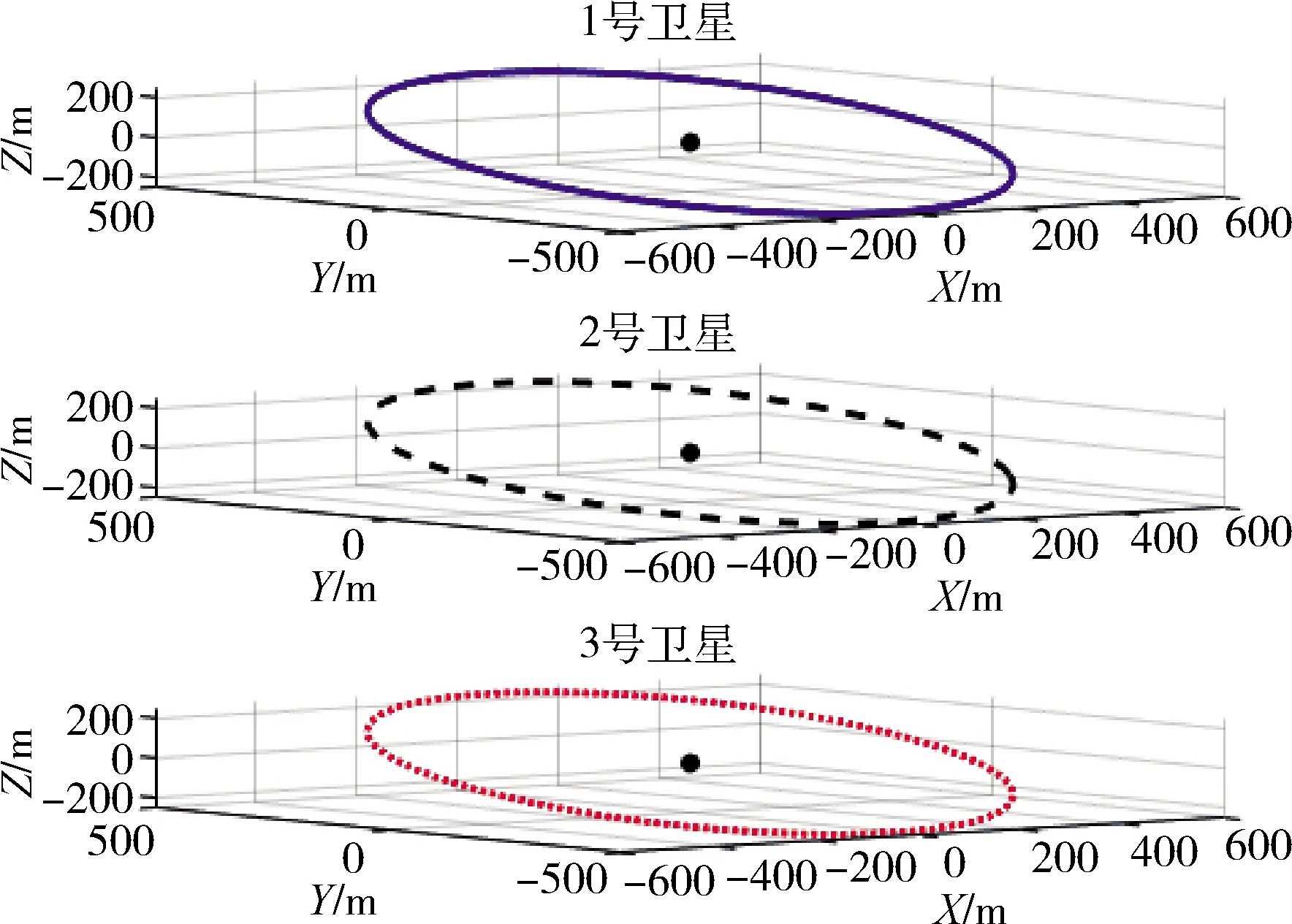
图3 编队相对运动轨迹
图4~7分别列出了采用仿生智能算法对3 颗编队卫星组成的编队进行控制,编队各卫星以及虚拟中心的位置误差和速度误差.
图4~7中青绿色、黑色和红色分别代表卫星x、y、z三轴方向的误差信息.由仿真结果可知,采用本文提出的控制算法,1号卫星到3号卫星的控制精度分别为0.222 m, 0.257 m,0.234 m,虚拟中心误差0.192 m,各编队卫星均能达到非常高的精度.速度误差可保持在 0.0011 m/s,0.0012 m/s,0.0012 m/s,虚拟中心0.0016 m/s,能够较精确的完成控制任务.
图8反应了脉冲响度变化的变化.
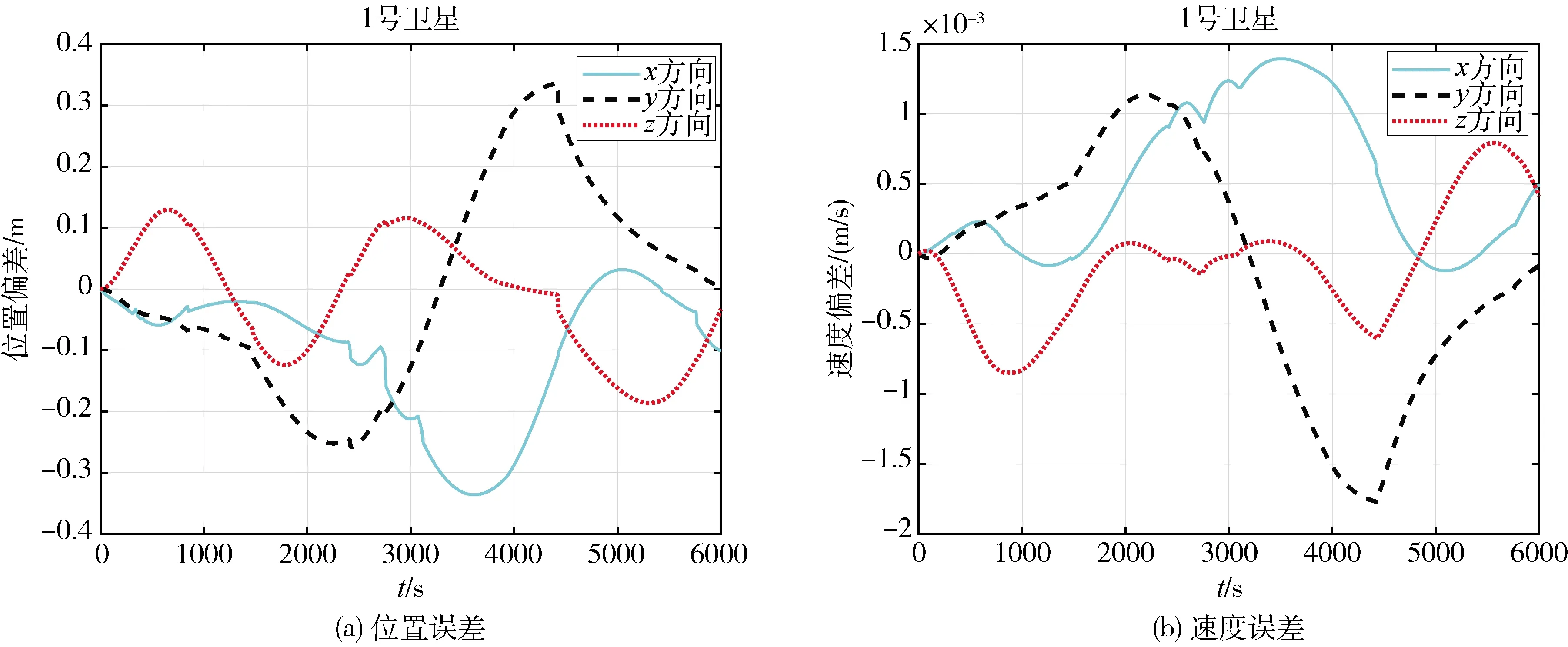
图4 1号卫星误差

图6 3号卫星误差
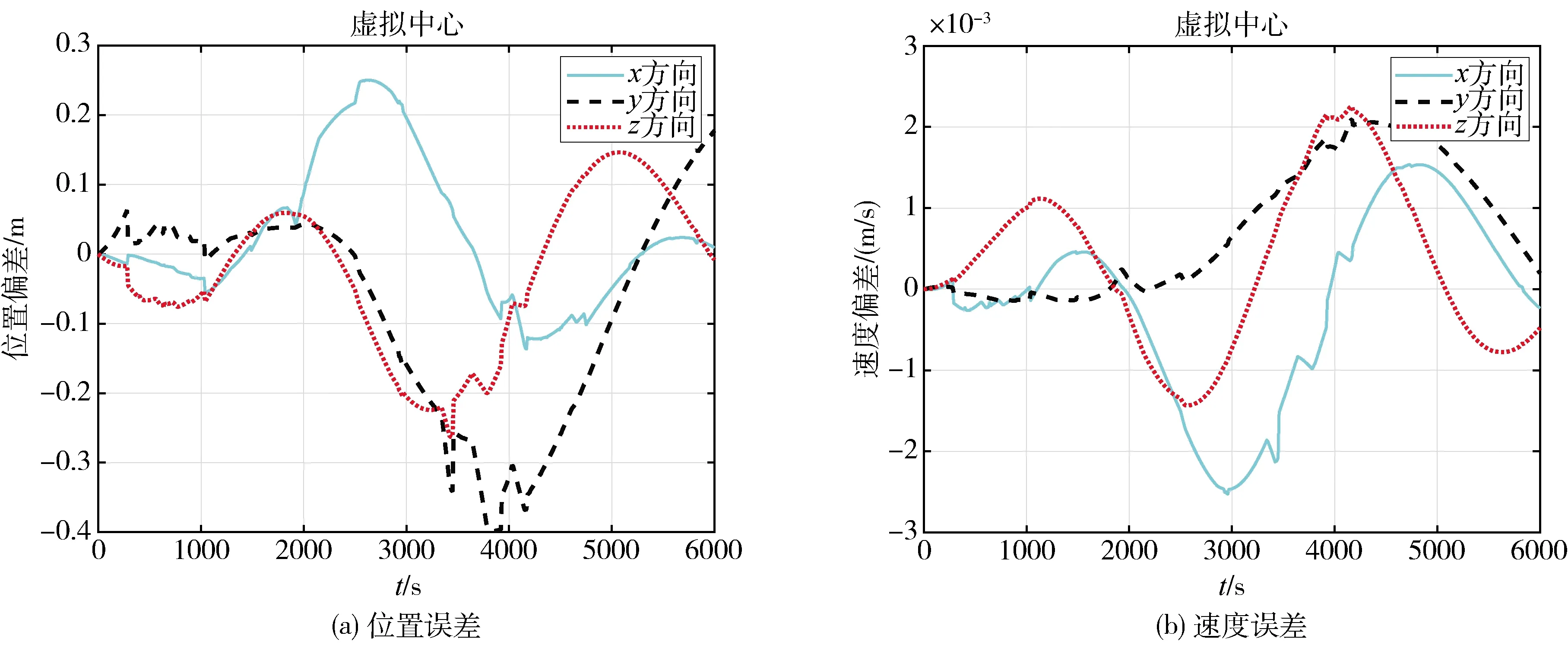
图7 虚拟中心误差
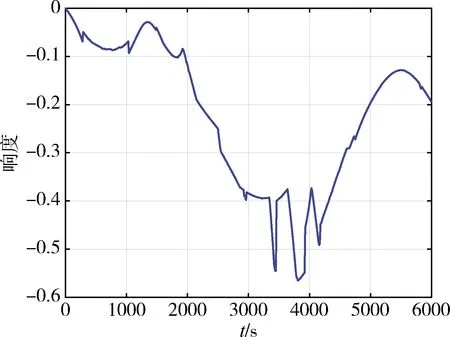
图8 响度变化
可以看出伴随着飞行过程中,响度不断变化,进而实现协调管理编队卫星的目的.使用本文所提略与经典LQR编队控制策略进行仿真对比,3颗编队卫星的控制精度如下图9所示.
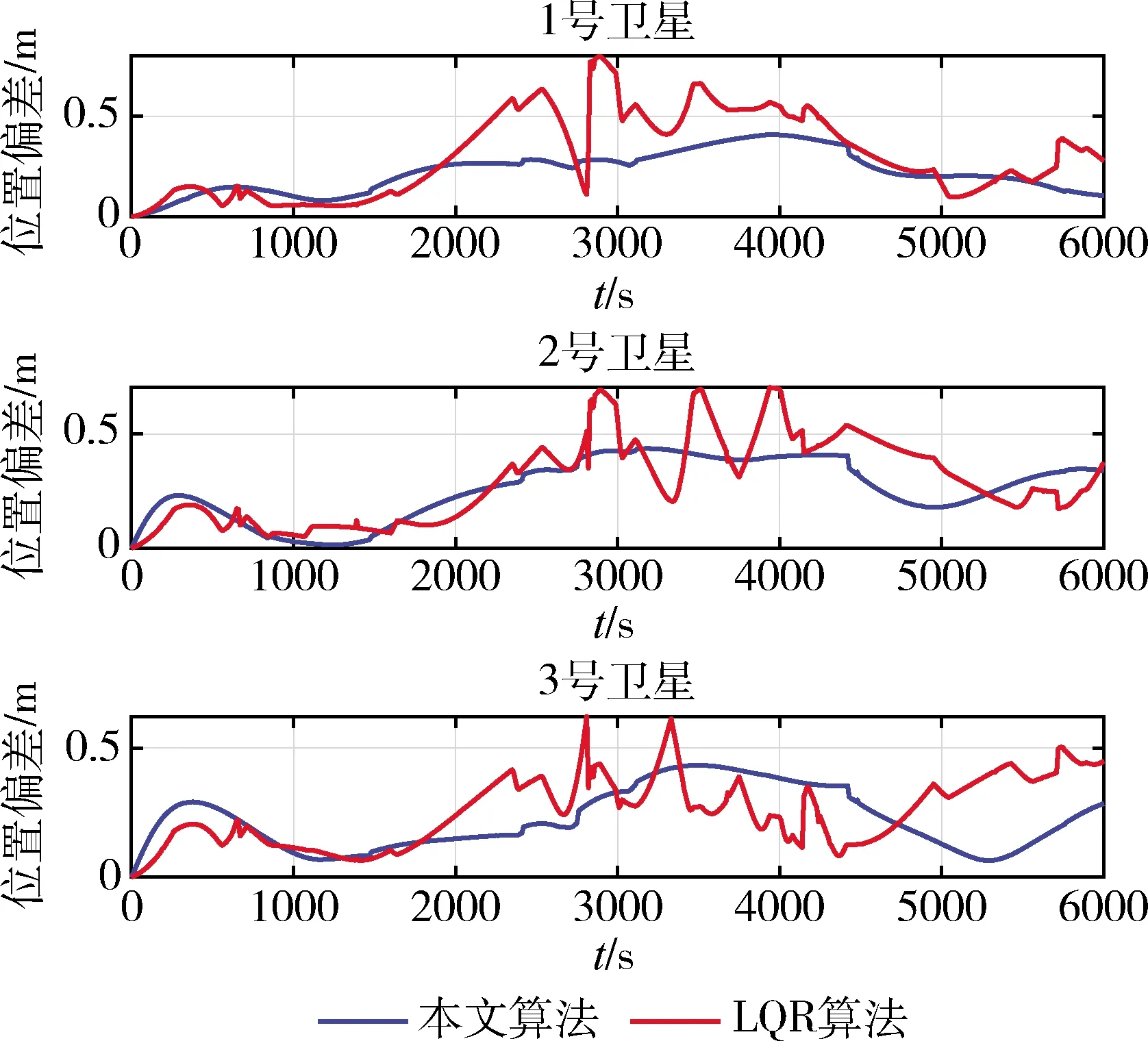
图9 误差对比图
由表1为两种策略条件下卫星平均误差及控制消耗对比.
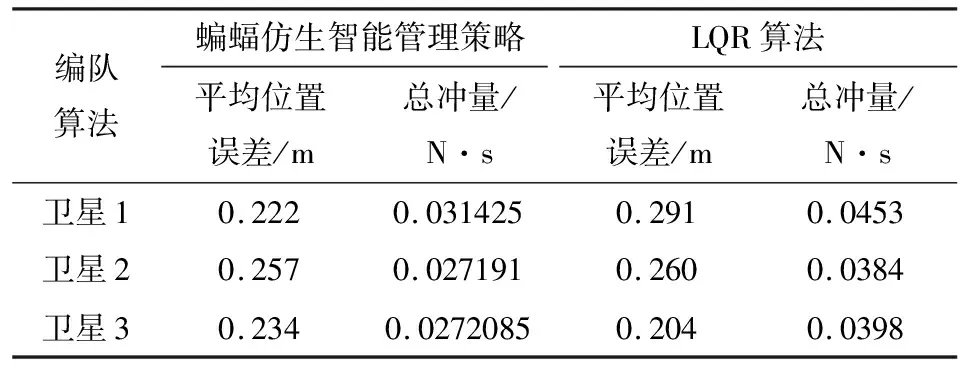
表1 编队两种方法对比
通过表1可以看到,采用基于蝙蝠飞行的仿生智能卫星编队管理策略比采用经典LQR算法可以通过协调控制,在满足控制精度需求的前提下,甚至可以在减少位置误差的情况下大幅度减少控制消耗,以提高卫星在轨寿命.
5 结 论
本文受蝙蝠飞行行为启发,首次将蝙蝠飞行机理应用至卫星编队协调和控制,研究建立了一种高效的卫星编队管理策略,算法清晰简明,易于实现,主要结论如下:
1)针对编队卫星的飞行的特性,建立动力学模型和应用图论理论,通过虚拟中心建立了编队误差模型,有效实现了对卫星编队状态的衡量;
2)整体效益与卫星个体效益在状态空间中存在相关性,他们之间的关系是可以通过蝙蝠行为表达和协调的,通过蝙蝠飞行的规则模式,协调卫星的控制行为,最终实现卫星编队构型的控制;
3)仿真结果表明蝙蝠仿生智能管理策略可以保持较高的精度的同时尽可能减少能量的消耗,算法可以实现高精度编队控制.