MEO导航卫星在轨放气产生的干扰力矩研究*
2020-05-27林佳伟王雪涛
陈 斌,林佳伟,王雪涛, 严 嵘, 杨 扬
0 引 言
导航卫星太阳翼采用的是碳纤维复合材料面板的蜂窝夹层结构,蜂窝夹层由面板、蜂窝芯子和胶黏剂构成[1].文献[2-4]的相关研究表明,真空下非金属材料放气是真实存在且比较复杂.根据多颗MEO(middle Earth orbit)导航卫星在轨数据分析,可判断卫星入轨后一段时间存在较大干扰力矩.假设从卫星各方向排出的气体均等,则不会对卫星产生干扰力矩.从卫星入轨后使用飞轮进行姿态控制时转速变化异常的现象分析,卫星存在不均等的干扰力矩,且一段时间后消失,从客观规律分析,比较符合在轨放气产生干扰力矩的现象.
太阳翼展开后放气的模型难以建立,地面或者在轨均无法测量放气产生的干扰力矩,一般采用控制力矩辨识间接估计在轨干扰力矩.目前,针对卫星在轨干扰力矩辨识有很多研究资料.文献[5]针对轴对称卫星提出了利用发动机喷气过程角速度变化解算干扰力矩的方法,但是此方法需要发动机安装满足轴对称,且需要知道推力器工作产生的具体力矩,使用具有一定局限性.文献[6]针对卫星稳态情况提出了一种基于特征系统实现算法的卫星周期干扰力矩估计方法,但是卫星在轨现象表明放气产生的干扰力矩一般出现在太阳翼展开后一段时间,且力矩衰减,不属于周期性的干扰力矩,故此方法不适用.文献[7]以太空飞船为例,详细研究了基于非线性滤波算法,利用飞船姿态响应寻找漏气小孔的新方法,但是此方法需要通过飞船初始状态估计出初始干扰力矩初值,对于放气产生的干扰力矩,由于无法获取初始值,此方法不适用.文献[8]针对单太阳翼卫星放气情况进行分析,采用喷气量估计干扰力矩,由于MEO导航卫星重量小,使用喷气量估计干扰力矩误差大,会带来较大的估计误差.此外由于MEO导航卫星没有测量角加速度的设备,并且陀螺精度较低,因此角速度差分获取的角加速度误差较大.若采用推力估计干扰力矩,无法准确获得推力器效率,会带来较大的推力误差.
分析太阳翼展开后放气的影响有两个用途,一是优化卫星飞控流程,可以调整转入飞轮控制的时机以避开干扰力矩较大的时段,从而避免飞轮不能有效消除干扰力矩带来的不必要的故障处置;二是指导卫星结构设计,合理设计放气孔,以减少在轨不均匀放气造成的干扰力矩.
本文首先给出太阳翼展开后放气的机理,再采用飞轮转速变化等信息估计干扰力矩,采用此方法估计在轨多颗MEO卫星的干扰力矩,最后以典型MEO卫星的在轨数据进行验证,证明此方法的合理有效.
1 太阳翼在轨放气机理概述
卫星结构中广泛使用的蜂窝夹层板、隔热材料、胶黏剂等在真空、高低温、粒子辐射等环境中蒸发、升华和分解释放气体[9].在地面制造和储存过程中,蜂窝夹层会储存大量的空气,发射入轨后,卫星工作于低气压的真空环境.由于外部气压变低,蜂窝夹层内部气压增大,在材料表面吸附的气体就会从表面脱附,溶解于材料内部的气体向真空边界扩散,最后在界面上释放、脱离材料,气体分子不断从其表面脱离释放出来并挥发逸出,最终达到蜂窝内腔和外界的压力平衡.
除了太阳翼,卫星本体也存在着较多空隙,发射时带了很多气体入轨.但是在入轨后,由于卫星各个面的放气孔设置不完全均匀规律,各个面排出的气体不完全相同,因此会产生一定的干扰力矩.
针对真空下非金属材料的放气特性,不同学者建立了不同的放气模型,放气模型不是本文的研究重点,只是作为对估计干扰力矩的参考.尽管模型不同,但均表明,在初始阶段放气速率较快,随着时间变化放气逐渐减小并最终趋于平稳.在发射主动段,星体、太阳翼也进行放气,但主动段时外界有一定大气压力,对放气速率有阻碍作用,且不具备估计放气产生干扰的条件.本文只研究星箭分离且太阳翼展开后的放气影响.
2 卫星放气干扰力矩估计方法
卫星在轨工作时,干扰力矩的主要来源是重力梯度力矩、地磁力矩、太阳光压力矩以及放气干扰等.轨道高度在2万公里或高于2万公里的导航卫星一般都是此类型卫星.这样的轨道高度决定了其受到的大气阻力和地球辐射压很小,基本可以忽略,因而太阳光压是导航卫星受到的最大非保守力[10-11].相对于放气产生的干扰力矩,其他干扰力矩都比较小.从上述放气机理可知,卫星只有在太阳翼展开初期具备比较大的放气速率,后期就趋于平衡.此外,从MEO导航卫星在轨工况可知,在太阳翼展开初期放气产生的干扰力矩远远大于其他力矩影响.因此在估计干扰力矩时可以忽略其他干扰.
在太阳翼展开初期,放气产生的干扰力矩持续存在,通过陀螺可以测量到干扰力矩对姿态的扰动,此时卫星的姿态动力学方程满足:
(1)

卫星的转动惯量受太阳翼、天线等活动部件是否展开的影响,但是目前有一套精确的测量方法可以确保地面测量的转动惯量误差在0.1%以内[12].星箭分离后到进入正常模式期间,用于姿态控制产生的燃料消耗很少,可以忽略由此引起的转动惯量变化,本文采用地面测量的理论转动惯量估算干扰力矩.

由于推力器力矩误差较大,本文在使用飞轮进行姿态控制的模式估计干扰力矩.将式(1)展开可得:
(2)
式中,CW为飞轮安装矩阵,可以精确测量得到.Nwi为飞轮转速,单位为r/min,可以通过遥测数据获取.K为常值转换系数,用于将飞轮转速单位转换为rad/s.Irw为飞轮转轴的转动惯量,单位是kg·m2.Mci为控制力矩,可以通过遥测数据获取.令
A=(C00Nw1+C01Nw2+C02Nw3+C03Nw4)IrwK
(3)
B=(C10Nw1+C11Nw2+C12Nw3+C13Nw4)IrwK
(4)
C=(C20Nw1+C21Nw2+C22Nw3+C23Nw4)IrwK
(5)
考虑惯量积Jxy、Jzx、Jyz近似为0,展开式(2)并写为标量形式可得:
(6)
(7)
(8)
考虑放气干扰力矩在整个过程中一直存在,而且不会突变,对角速度进行分段处理拟合,拟合公式如下:
wi=μi0t2+μi1t+μi2
(9)
对式(9)求导,可得角速度变化率:
(10)
将式(10)代入式(6~8)可得:
Mdx=Jxx(2μ00t+μ01)-wywz(Jyy-Jzz)-
wzB+wyC-Mcx
(11)
Mdy=Jyy(2μ10t+μ11)-wzwx(Jxx-Jzz)+
wzA-wxC-Mcy
(12)
Mdz=Jzz(2μ20t+μ21)-wywx(Jxx-Jyy)-
wyA+wxB-Mcz
(13)
基于上述推导得到的公式,结合在轨遥测,可计算出太阳翼展开后的干扰力矩.
3 在轨数据验证
3.1 数据预处理
MEO导航卫星属于小批量生产,每次发射都是一箭双星,飞控程序基本一致.使用九颗卫星的数据进行计算分析比对,其编号分别为M1~M9.以对M5卫星的计算为例详细说明.
在飞轮控制模式下从遥测数据得到的三轴角速度分别如图1中从左到右所示,可以看出角速度存在周期性的抖动,对干扰力矩的计算会带来误差,需根据角速度特点对其进行平滑处理.

图1 M5卫星角速度遥测
对角速度采取平滑滤波方式进行处理后的角速度如图2所示,可以看出经过滤波处理,消除了周期性的抖动,对滤波后的角速度进行二次曲线或者一次曲线拟合,可得拟合后的角速度,进一步可以得到角速度变化率,具体数据如表1所示.

图2 拟合处理后M5卫星角速度
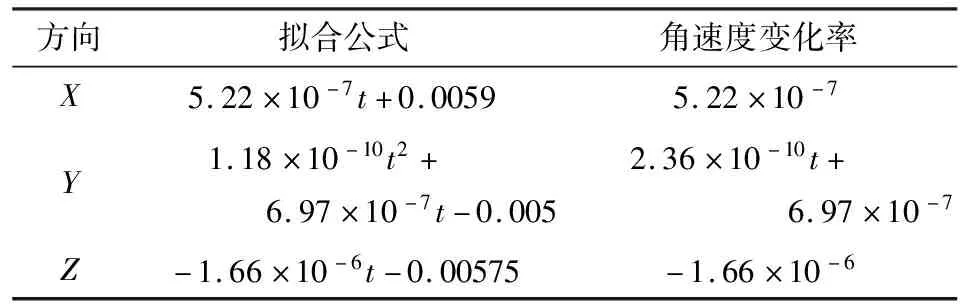
表1 M5卫星角速度拟合值
3.2 计算干扰力矩
计算干扰力矩时,选择飞轮控制模式且遥测连续有效的时间段,对在轨遥测数据进行进一步处理,获取到角速度变化量,使用式(11)~(13)计算干扰力矩,计算结果如图3所示.
图3是9颗卫星根据本文推导公式计算的干扰力矩,从图中可以看出,干扰力矩量级基本一致,随着时间推移气体产生的干扰力矩逐渐减小,符合预期设想.
从图中曲线可以看出,卫星的干扰力矩模型不同,不具备建立统一的干扰力矩模型的条件.
4 地面仿真验证
为了验证卫星干扰力矩在轨辨识的正确性,在卫星模拟器的动力学模型增加干扰力矩,比较仿真结果和在轨数据的一致性.
使用M5卫星的初始状态设置卫星模拟器,角动量仿真曲线如图4所示.将M5卫星运行一个小时之后和在轨运行角动量实际变化值进行比较,角动量最终变化值如表2所示.

表2 角动量变化比较
其中误差来源主要有以下几个因素:
1)动力学模型不精.地面仿真动力学模型未能完全模拟真实卫星工况,对外界干扰力矩的响应不真实.
2)飞轮等单机模型和真实产品特性不同,未能体现真实变化情况.
3)用于计算干扰力矩时的角速度采集误差较大,未能准确计算出干扰力矩.
仿真结果表明本文方法计算的放气干扰力矩方法正确,计算结果接近真实情况.
5 结 论
本文针对MEO卫星在轨运行初期存在较大干扰力矩的现象进行分析,采用飞轮转速变化和角速度信息综合计算出干扰力矩.采用9颗在轨卫星的数据进行分析计算可知,本文提出的方法正确有效,但是由于不同卫星的放气特性不同,所以不具备获取统一放气模型的条件.基于上述信息,本文提出如下建议:

图3 卫星干扰力矩

图4 仿真运行时角动量
1)后续飞控程序可以做出一定优化,推迟转入飞轮控制模式的时间.
2)地面研制过程中,可以优化卫星本体的放气孔设计,减少不规则放气造成的干扰.