五相永磁同步电机两相开路故障容错控制策略
2020-05-14于仲安梁建伟张峻铭
于仲安,卢 健,梁建伟,张峻铭
(江西理工大学 电气工程与自动化学院,江西 赣州 341000)
0 引 言
近年来,永磁同步电机因其高效率、快速响应等优点成为提高电机驱动系统功率和速率的一大优势[1-3]。随着现代电力电子技术的迅猛发展,传统的交流电机不在受限于供电系统,电机的相数可以自由改变 ,多相永磁同步电机由于定子绕组相数的冗余,具有更高的控制自由度、容错能力好,使得电机的可靠性大大提高,能够实现低压大功率运行,具有转矩频率高、脉动小、噪声低的优点,因此多相电机驱动系统在船舶、航空航天、电动汽车等需高可靠性的领域拥有良好的工程应用前景[4-6]。
多相电机驱动系统的突出优点主要是当逆变桥的桥臂和电机本体出现开路和短路故障时,尽量抑制电机的转矩脉动,保证电机仍能在一定时间内拥有维持一定的转矩输出能力,不会影响电机的正常启动和运行,使其拥有足够的安全时间检查和维修[7-10]。对于短路故障可以通过电器隔离的方法转换成开路故障,因此当发生故障时均可采用开路故障的容错方法。文献[11-13]根据开路前后电机磁动势不变的原则,建立电机开路后的数学模型,解得剩余相电流的幅值和相位,对故障后的电流进行补偿,降低电机转矩脉动,但此方法用到的电流滞环控制会使得开关频率不固定,增加开关管损耗。文献[14-15]在维持磁动势不变的条件下,分别加入了定子铜耗最小和铜耗相等的优化条件,得到了在不同磁场类型和运行条件下的容错电流的在线生成方法。文献[16]针对五相PMSM单相开路故障,提出了一种非对称的SVPWM容错控制策略,有效降低了非故障相的电流谐波和转矩脉动,拥有良好的动态性能。文献[17]提出了一种新型的容错控制技术,分析了电机定子绕组和逆变器开关的开路故障,通过一个简单的封闭式方程,查表计算最佳参考电流,有效降低开路故障下的转矩脉动和欧姆损耗。
为了能够使电机在故障状态下继续采用原先的矢量控制策略,以五相永磁同步电机作为研究对象,建立故障后的电机数学模型,分析开路时的转矩磁动势,构建两相开路下的容错补偿基波和三次谐波电流,从而达到抑制电机转矩脉动,提高转矩输出能力的目的。
1 正常状况下的磁动势数学模型
本文采用定子绕组星型连接的五相永磁同步电机,定子绕组无中线,图1为五相电机逆变器驱动的电机系统。
五相PMSM绕组采取正弦式分布,定子线圈通入五相正弦电流
(1)
每相线圈的磁动势表达式
(2)
式中,ω为电机角速度;N为定子线圈每相匝数;Im1为每相电流基波幅值;Im3为每相电流三系谐波幅值。
则定子绕组的总磁动势MMF为
(3)
其中,φ为空间电角度。
2 两相开路五相PMSM数学模型
2.1 相邻两相开路同步旋转坐标系下的数学模型
电机在正常运行时自然坐标系到两相静止坐标的扩展clark矩阵为
(4)

假设A、B相开路,此时的变换矩阵降阶为三阶不对称矩阵,开路下的变换矩阵直接去掉第一二列得:
(5)
由降阶后的变换矩阵可知,式中的第一行与第二行,第一行与第三行不再正交,因此在第一行和第二行加入矫正系数c1、c2,此时变换矩阵的第一第二行满足
(6)
其中,

求得c1=0.4363,c2=0.317
同时去掉与第一第二行不正交的第三行和第四行,得到相邻两相开路下的修正解耦变化矩阵
(7)
2.2 不相邻两相开路同步旋转坐标系下的数学模型
假设A、C相开路,此时的变换矩阵降阶为三阶不对称矩阵,开路下的变换矩阵直接去掉第一三列,同时加入矫正系数d1、d2
(8)

(9)
因此不相邻两相开路下的修正解耦变化矩阵T2
(10)
同步旋转坐标系下的Park变换矩阵为

(11)
式中,θ为转子电角度。
电磁转矩等于电流不变时磁共能(Wco)对转子机械角(θm)的偏导数,因此电磁转矩可以表示为
(12)
式中,θm为转子机械角位置;p为极对数;ψdqm为旋转正交坐标系下的永磁磁链;ψm1为基波磁链幅值;ψm3为3次谐波磁链幅值,且
(13)
3 FPMSM相邻两相开路时容错补偿电流计算
3.1 无补偿时的仿真
假设电机驱动系统出现A、B相开路故障,当不采用容错补偿电流时,剩余相的相电流分别为
(14)
采用Matlab/Simulink搭建五相永磁同步电机驱动控制系统仿真模型,仿真结果如图2、3所示
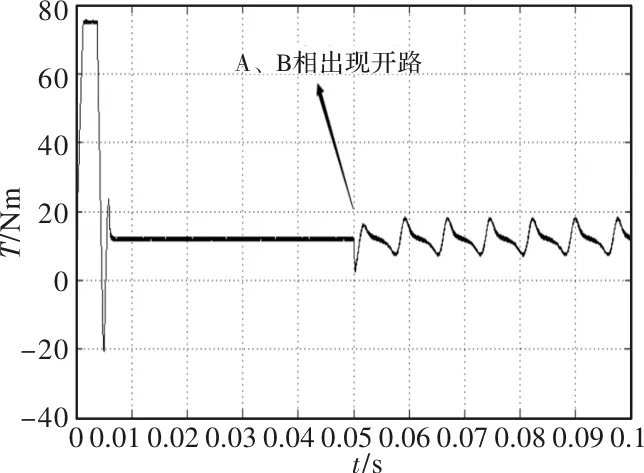
图2 A、B相开路无补偿时的转矩

图3 A、B相开路无补偿时的转速
由仿真结果可知,当电机驱动控制系统出现A、B相开路故障且不采取任何补偿策略时,电机的转矩和转速出现较大波动,转矩和转速的输出能力大大降低。
3.2 开路后的容错电流计算
假设五相电机驱动系统A、B相出现开路故障,因此开路后A、B相的相电流为零,为了保证电机在故障时仍能保持平滑的电磁转矩输出,需要重新定义剩余相电流的幅值和相位,使电机能够稳定运行。A、B相开路后剩余相C、D、E产生的磁动势分别为
(15)
则剩余相的总磁动势
(16)
由于保持两相开路后的剩余磁动势同正常状态下的总磁动势相等,则有
联立式(3)和式(16),化简后得基波平面下的关系式
(17)

(18)
由于FPMSM采用星型连接,且定子绕组无中线,故两相开路相后剩余相电流满足
(19)
则有
(20)
将式(18)代入式(17),根据左右两边系数相等,化简得
(21)
(22)
联立式(20)、式(21)、式(22)解得

(23)
(24)
建立A、B相开路后的三次谐波容错电流关系式
(25)

结合式(25)可得A、B相开路容错电流:
(26)
图4 A、B相开路时剩余相的基波和三次谐波电流分布矢量图
按照相同的方法可以求得当五相电机驱动控制系统出现A、C相开路时剩余相的容错电流基波平面关系式
(27)
三次谐波平面关系式
(28)
计算解得A、C相开路时的容错电流
(29)
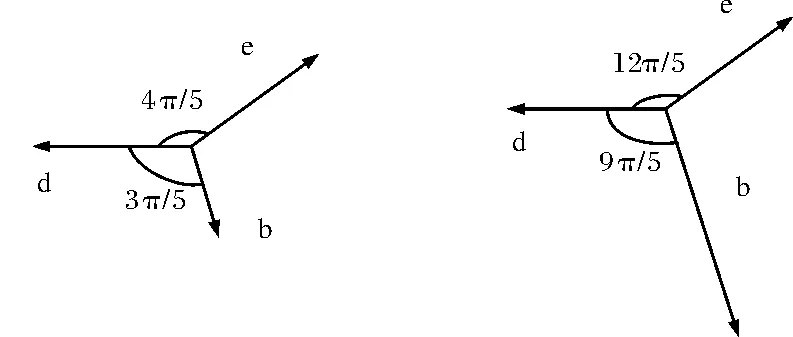
图5 A、C相开路时剩余相的基波和三次谐波电流分布矢量图
4 五相PMSM容错仿真及实验结果分析
为了对计算结果进行验证,采用Matlab/Simulink模块搭建五相永磁同步电机容错及其控制系统仿真模型,包括电流控制算法模块、转速PI调节模块、坐标变换模块、功率变换器模块及FPMSM模块。给定转速1000 r/min,额定负载转矩10 Nm。通过电机分别工作在正常电流、开路电流和容错电流状态下,测得其在不同工作状态下的电流、转矩和转速波形。
五相PMSM容错控制系统框图如图6所示。

图6 五相永磁同步电机容错控制框图
定义电磁转矩脉动系数为
(30)
式中,Tmax、Tmin、Tav分别为电磁转矩的最大值、最小值及平均值。
当五相永磁同步电机工作在正常状态时平均转矩为12.2 Nm,最大和最小转矩分别为12.6 Nm和11.55 Nm,转矩脉动K为8.6%。
当五相永磁同步电机工作在A、B相开路状态,未加入容错电流时,最大和最小转矩分别为17.2 Nm和6.4 Nm,转矩脉动K为91.53%。当五相永磁同步电机工作在A、B相开路状态,采用本文给定的容错电流时,最大和最小转矩分别为14.6 Nm和9.6 Nm,转矩脉动K为41.32%。仿真结果如图7图8所示。
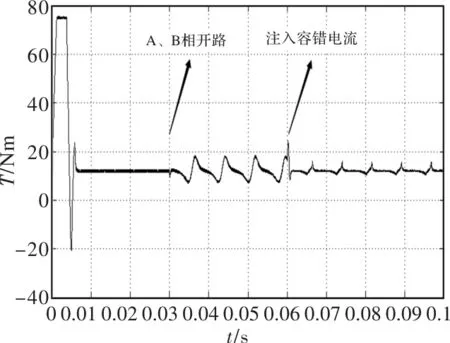
图7 转矩波形

图8 转速波形
同理,当A、C相出现开路故障时的转矩脉动系数K经计算为43.33%,给定本文的容错电流后的转矩脉动为20.83%,仿真结果如图9、图10所示。

图9 转矩波形

图10 转速波形
5 结 语
本文对矢量控制的五相永磁同步电机相邻、不相邻两相开路故障进行研究,结合磁动势不变的原则,计算出了两相开路时的基波和三次谐波容错补偿电流,并在Matlab/Simulink上搭建了五相PMSM仿真模型验证了其容错策略的正确性和可行性,仿真结果表明,施加了补偿电流后的两相开路故障电机系统,保持了和正常状况下基本相一致的转速和转矩输出能力,较大程度抑制了开路故障下的转矩波动,提高了五相PMSM的安全性和可靠性。
