基于自适应多模型扩展卡尔曼滤波的感应电机转速估计方法
2020-05-14薛浩飞李国银马金洋毕京斌
薛浩飞,李国银,杨 吉,马金洋,毕京斌
(1. 中车青岛四方车辆研究所有限公司,山东 青岛 266031;2. 重庆中车四方所科技有限公司,重庆 401133)
0 引 言
由于无速度传感器控制技术提升了感应电机控制系统的可靠性,且节约了成本,因此成为了感应电机控制系统的研究热点之一,备受业界关注。近年来,随着高性能处理器的飞速发展,扩展卡尔曼滤波(Extended Kalman Filter, EKF)计算量大的问题得到解决,其在无速度传感器控制领域中的应用受到了国内外学者的广泛关注。
参考连续时间模型状态样本与EKF估计样本的差异,证明了均方意义上的随机状态估计过程的收敛性[1]。研究了一种基于抗差扩展卡尔曼滤波的无速度传感器算法,这种方法通过误差向量和外部干扰向量来构建抗差等级,从而实时地调整协方差矩阵的大小,该方法是对EKF的一种改进,主要是缓解EKF面对粗差时估计性能变差的问题[2-3]。将强跟踪算法与EKF相结合,实时调节渐消因子和电机参数,提高了模型的自适应能力和抵抗外部环境变化的能力[4-5]。提出了一种对称强跟踪EKF算法并将其应用于感应电机的无速度传感器控制系统中,该方法利用Cholesky三角分解方法[6]改变了误差协方差矩阵中多重渐消因子矩阵的工作方式,保证了迭代过程中误差协方差矩阵的对称性,提高了算法的稳定性。
然而EKF也存在着对模型不确定性的鲁棒性差以及跟踪突变性能不强等问题,针对这些问题,本文提出了一种自适应多模型扩展卡尔曼滤波(AMM-EKF)的转速估计方法。该算法建立了基于速度和磁链估计的多模型EKF,模型的转换遵循马尔可夫链,通过融合不同模型在不同权重下的输出,得到了估计值,并对加权计算进行了研究;同时,利用残差序列可以连续地自适应调整转移概率和系统噪声矩阵,利用后验信息对先验信息进行修正,得到模型间更精确的匹配和转换情况。本文提出的方法提高了模型对实际系统和环境变化的适应性,有效降低了速度估计误差。对基于AMM-EKF的感应电机无速度传感器矢量控制系统进行了实验验证,实验结果验证了算法的正确性和有效性。
1 扩展卡尔曼滤波
EKF方程的一般形式可表示为
(1)
(2)

将式(1)、式(2)离散化可得:
(3)
(4)


T为采样时间。
EKF本身有反馈校正环节,详细推导步骤为
(1)状态估计值预测
(5)
(2)误差协方差阵预测
(6)
Gk+1=
(3)计算卡尔曼滤波器增益矩阵
(7)
(4)状态预测值校正
(8)
(5)误差协方差阵校正
(9)
式中,A′、B′、Hk、Kk、Q、R-离散后的系统矩阵、输入矩阵、输出矩阵、增益矩阵、系统噪声矩阵、测量噪声矩阵;上标“~”-预测量;上标“^”-校验量。
2 自适应多模型扩展卡尔曼滤波算法
如果EKF的误差协方差矩阵、系统噪声、测量噪声的初始值能够合适的设置,滤波器就可以根据构建的非线性模型得到较为准确的状态估计。然而由于模型建立过程中的简化误差、噪声概率统计学特性未知,使构建的模型具有很强的不确定性,不能与实际系统较好地匹配,造成EKF对模型不确定性的鲁棒性和跟踪突变的性能比较差[7-8]。
针对EKF存在的问题,研究了一种基于自适应多模型扩展卡尔曼滤波(Adaptive multiple-Model Extended Kalman Filter, AMM-EKF)感应电机转速估计方法。该算法建立了基于速度和磁链估计的多模型EKF,模型的转换遵循马尔可夫链,通过融合不同模型在不同权重下的输出,得到了估计值,并对加权计算进行了研究;同时,利用残差序列可以连续地自适应调整转移概率和系统噪声矩阵,利用后验信息对先验信息进行修正,得到模型间更精确的匹配和转换情况。图2为AMM-EKF算法的结构框图。

图1 马尔科夫链结构
算法分为三步,分别为
(1)输入交互;
(2)滤波计算;
(3)概率和噪声矩阵更新。
其中概率和噪声矩阵的更新是算法的核心。
先验转移概率如下:
(10)

算法滤波性能可以用残差序列的协方差矩阵来评判;同时,算法需要的信息也包含在残差序列里面,AMM-EKF算法的混合残差可从式(11)得出
(11)
残差的协方差矩阵可由式(12)计算得到
(12)

根据式(11)、式(12),并选取基于正态分布的似然函数
(13)

(14)
则转移概率可由式(15)来自适应更新,
(15)
(16)
因此,式(16)可重新表示如下
(17)

图2 自适应多模型扩展卡尔曼滤波结构框
其中,
(18)
(19)
其中,
(20)
根据以上方法,可以得到自适应更新的转移概率,从而使不同模型之间的转换更加精确,降低了先验信息的影响,提高了电机估计状态的融合精度。同时,与固定先验噪声相比,AMM-EKF充分利用了当前量测信息和过程噪声来实时估计系统噪声矩阵,使得系统噪声矩阵Q具有了自适应性,提高了模型与系统实际运行状态的匹配程度。
AMM-EKF算法可分为如下五个步骤:
Step1:转移概率的自适应更新
模型之间进行混合滤波计算,并由式(11)~式(20)得到实时更新的转移概率和系统噪声矩阵
Step2:输入交互
(21)
(22)
(23)
(24)
Step3:状态预测

Step4:模型匹配概率更新
模型j的似然函数为
(25)
根据Bayes准则,通过式(26)、式(27)计算出模型匹配概率
(26)
(27)
Step5:输出融合
对不同模型的输出进行融合得到系统的最终输出值
(28)
(29)


图3 基于AMM-EKF的感应电机无速度传感器矢量控制系统原理框图
图中,ωs为转差,Vdc为直流母线电压;Iu、iv、iw为u、v、w轴定子电流;ud、uq,id、iq为d、q轴定子电压,电流。
3 实验验证
3.1 系统实现
在基于浮点数字信号处理器TMS320F28335的平台上实现基于AMM-EKF的无速度传感器控制方法的实验,实验平台如图4所示,表1为实验中采用的感应电机参数。

表1 感应电机参数

图4 实验平台
3.2 正确性实验验证
将AMM-EKF算法估计的转速进行闭环来测试该系统的基础性能。主要包括:转速跟踪给定指令的能力、正反转性能、低速及低速突加减负载的能力,在实验中主要以转速估计误差来评价算法的估计性能。
图5给出了基于AMM-EKF的无速度传感器控制系统在全速范围内运行的实验波形图,参考速度指令依次从低速变化到额定转速,再从额定转速降低至零速,可以看出,在速度指令改变后,AMM-EKF的估计转速能够快速的跟踪实际转速,说明基于AMM-EKF的无传感器控制方法是可行的,且能够在宽速度范围内良好、稳定的运行。
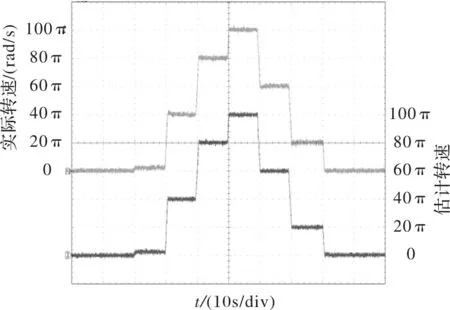
图5 基于AMM-EKF的无速度传感器控制系统宽转速范围内实验波形
基于AMM-EKF的无传感器控制系统的正反转切换响应如图6所示。实验开始时,电机以20π rad/s的斜率加速到100π rad/s。然后,系统保持运行状态7 s。在特定的时刻,反向命令被发送给驱动系统。电机立即开始减速并在5 s内平稳地切换到反向运行。结果表明,定子电流在反转过程中未发生振荡,且AMM-EKF在整个过程中具有良好的跟踪实际转速的能力。

图6 低速范围正反转实验波形
图7是AMM-EKF算法在低速突加负载的实验结果,实验中电机先以1π rad/s的转速空载运行,运行一段时间后突加100%额定负载,图中分别显示了测量速度、速度估计误差和u相定子电流。从图中可看出,突加100%额定负载后,系统可以快速恢复至给定转速,速度估计误差最大值为0.4 rad/s,定子电流在带载过程中正弦度高、输出稳定,表明具有良好的低速动态加载及稳定带载性能。
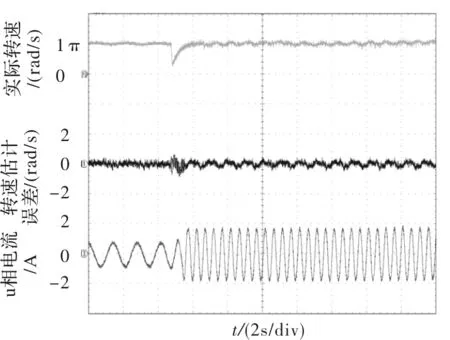
图7 1π rad/s时突加负载实验波形
3.3 有效性实验验证
3.3.1 抗外部干扰性能实验验证
为了很好的阐明AMM-EKF在工作环境改变时的性能,在电机运行于100π rad/s时进行了外部电流干扰的对比实验,实验过程为将2A的电流脉冲叠加到定子电流采样值中,对比结果如图8所示。如图所示,在干扰时刻,EKF的估计转速最大波动幅值为28 rad/s,最大估计误差的幅值达到了11 rad/s;而AMM-EKF由于内部有多个估计模型,能够自适应的调节模型的输出来跟随环境的变化,估计转速的波动幅值只有6 rad/s,估计误差的幅值也只有6 rad/s;此外,在发生干扰时刻的估计转速和误差收敛速度方面,AMM-EKF也明显好于EKF;同时从图中还可以看出在干扰时刻,AMM-EKF的收敛性明显优于EKF。因此,在系统出现干扰时,相比于EKF,AMM-EKF可以显著削弱干扰的影响,系统的抗外部干扰性能得到了明显的提升。
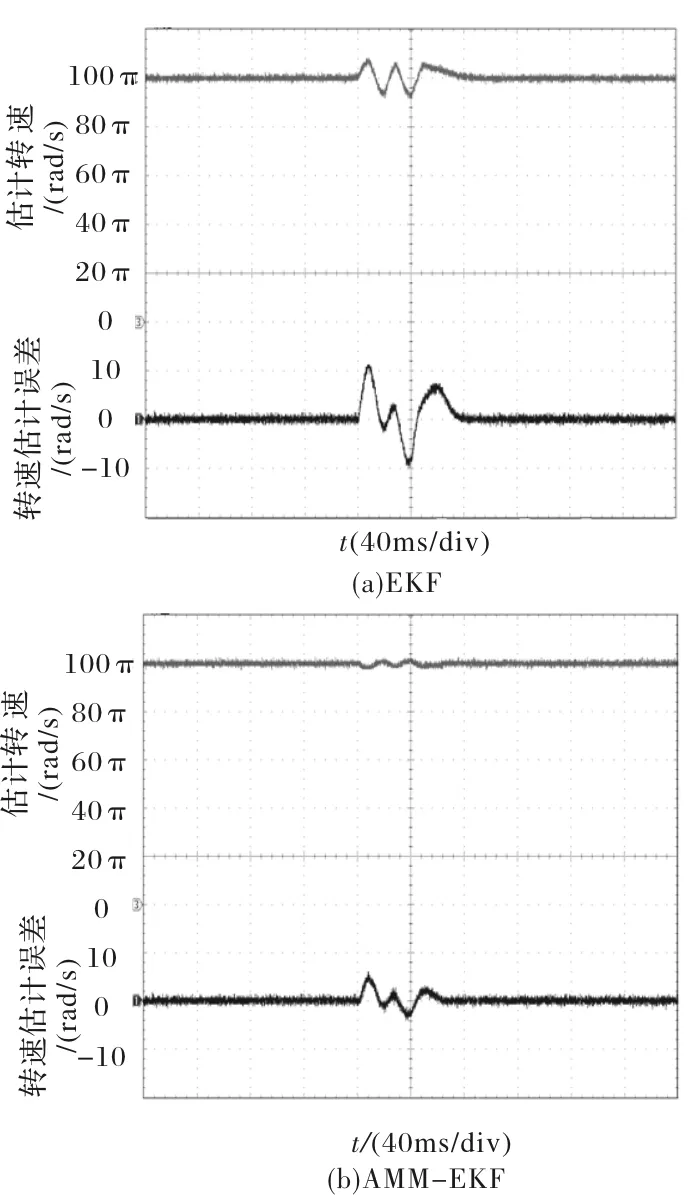
图8 100π rad/s时施加外部干扰实验波形比较
3.3.2 抗内部估计误差性能实验验证
图9为发生内部估计误差时,基于EKF和AMM-EKF的无速度传上升感器控制系统的实验对比图,实验中电机先以100π rad/s的转速空载运行,在某一时刻突然加入内部电流估计误差向量x=[1 0 0 0 0]。从图中可以看出,在内部估计误差发生的时刻,EKF的估计转速波动明显大于AMM-EKF,EKF的波动达到了30 rad/s,而AMM-EKF只有9 rad/s;同时,EKF的估计转速误差也同样大于AMM-EKF,EKF的估计误差达到了12 rad/s,而AMM-EKF只有5 rad/s;另外从图中还可以看出在发生内部干扰时刻,AMM-EKF的收敛性明显优于EKF。因此,在系统发生内部估计误差时刻,相比于EKF,AMM-EKF可以显著削弱干扰的影响,系统的抗外部干扰性能得到了明显的提升。
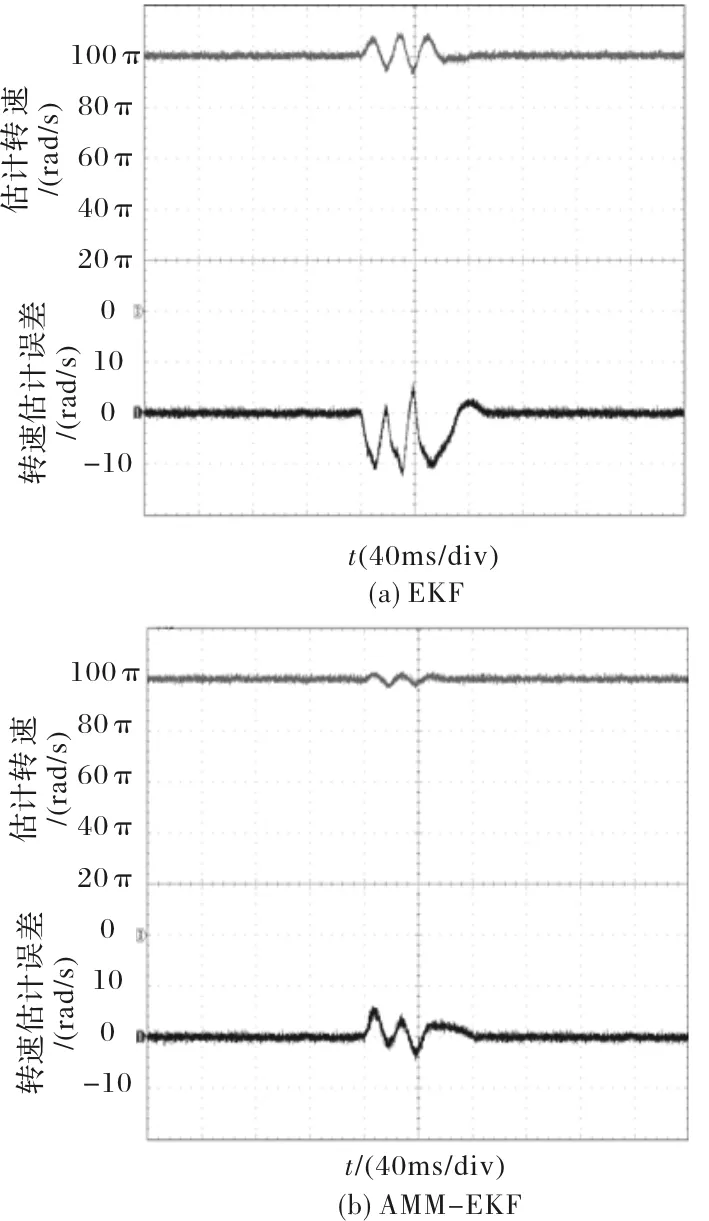
图9 100π rad/s时施加内部估计误差实验波形比较
3.3.3 突加减负载动态性能实验验证
图10为当电机以100π rad/s 的速度运行,突加减额定负载时EKF与AMM-EKF系统的实验响应波形图,电机实际转速、和转速估计误差、电机相电流波形如图所示。实验中突加减负载后,EKF 和AMM-EKF的速度都能迅速恢复到给定速度。然而,相比于EKF,基于AMM-EKF的最大速度估计误差明显减小,误差从17 rad/s减少到10 rad/s,AMM-EKF在高速突加减负载时的跟踪性能、收敛性也明显优于EKF。
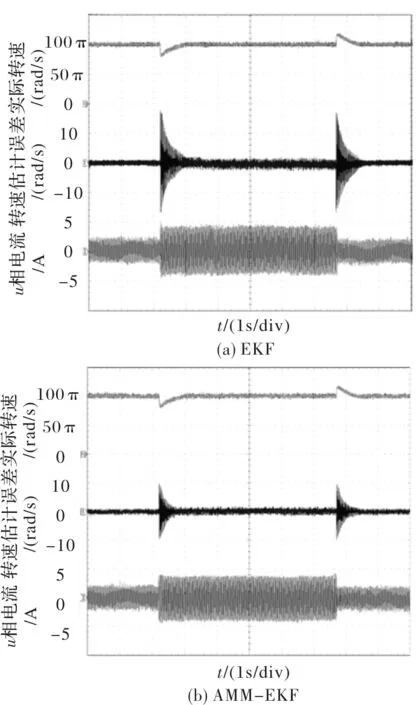
图10 100π rad/s时突加减额定负载实验波形比较
4 结 语
本文提出了一种基于AMM-EKF的感应电机转速估计方法,在1.1 kW感应电机驱动平台上验证了算法的正确性和有效性。实验结果表明AMM-EKF能有效提高系统模型对于实际系统以及外部环境变化的适应性。基于本文提出的转速估计方法可以削减系统在运行过程中发生内外部不确定干扰时的转速辨识误差,提高了感应电机无速度传感器控制系统在不同工况下的稳态和动态性能。