基于改进细菌觅食优化的彩超图像增强算法
2020-05-11叶明全
宛 楠,叶明全
(1.皖南医学院 医学信息学院,安徽 芜湖 241002;2.皖南医学院 健康大数据挖掘与应用研究中心,安徽 芜湖 241002)
为了医疗或医学研究的需要,医学影像[1]技术以非侵入方式对人体或人体某部分取得内部组织影像并进行分析和处理,以便获得可靠的医(疗)学辅助证据。随着医学影像技术快速的发展,其在疾病预防和诊断中变得极为重要。目前常见的医学影像技术主要包括X射线、超声波、伽马射线、磁共振、光学摄影(内视镜)等等,其中对人体辐射且创伤较小的为超声波的医学影像技术,本文的研究即是针对于彩色多普勒超声(简称彩超)图像而进行的。由彩色多普勒超声诊断仪发出超声波,并收集返回声波信号,这些信号用光点的形式显示出来,从而形成2D图像,光点的亮暗程度表示返回声波的大小,从而形成了2D灰度图像,而后诊断系统采用自相关等技术进行信号处理并经过伪彩色映射,将其叠加到2D灰度图像就形成了彩超图像。受彩超图像成像原理限制,大多数彩超设备在成像中必须加入自适应图像增强过程。
目前,并没有专门针对于彩超图像设计的图像增强算法,多数情况下彩超图像增强仍沿用经典的图像增强技术,其中主要包括基于直方图变换[2]、基于小波变换[3]和基于视觉感知[4]算法等,然而这些算法应用在彩超图像增强并不能得到很好的结果。为了避免由于设备的问题带来的诊断失误,彩超图像的增强方法需要提高自适应性和智能性,并减少人为介入,这样才能使彩超技术得到更广泛的应用。
大多数的群智能优化算法的研究都需要借鉴自然界中生物的进化或群体性社会行为,继而建立抽象数学模型,证明其在某种给定状态下一致收敛,最后给出求解方法。群智能优化算法尤其适合于那些目标函数非连续可微、甚至无法定义明确的目标函数的任务,具有对优化函数解析要求低、适合高维、多态等复杂问题的优点。在应用这些优化算法时,首先要定义图像增强的目标函数,比如:马拉加坦等人[5]针对低对比度图像中像素强度的动态范围有限的,图像对比度,不能完全揭示图像中的细节等问题,引入粒子群智能优化算法,设计了图像对比度的对数似然函数作为目标函数,以便给出图像增强与否的决策,迭代收敛后获得了较好的增强效果。叶志伟等人[6]设计的目标函数则是大多数智能优化算法均会采用的不完全Beta函数,由于其中的重要参数α和β的选取较为复杂,文中采用杜鹃智能搜索算法选择出较为满意的参数,实现了自适应的过程,并达到了较好的图像增强效果。
细菌觅食优化算法[7](Bacterial Foraging Optimization,简记为BFO)的思想来源于Passino对人类肠道中的大肠埃希氏菌觅食行为的观察和实验,算法的主要过程包括趋化、繁殖和迁徙操作,已有文献[8]证明相比于其他优化算法来说,细菌觅食优化算法具有良好的收敛性和全局寻优能力。然而BFO算法仍存在改进的空间,如经典的BFO算法有三层嵌套循环,导致计算复杂度过高,在优化高维图像问题上易陷入局部最优的缺点。本文将首先利用熵视觉显著性原理对彩超图像进行显著性分析,获得感兴趣的像素点,而后利用随机佳点理论选择好BFO的初始菌群,再利用BFO算法进行图像增强,最后,通过主客观测试实验验证本文所提出的算法的优越性及进一步研究的内容。
1 相关理论
1.1 细菌觅食优化
细菌觅食优化算法主要包括三个操作,即趋化操作、繁殖操作和迁徙操作,为阐述清晰,对需要用到的参数做了具体的说明,见表1。
1.1.1 趋化操作
趋化行为是BFO算法的核心,是细菌向着营养浓度高的区域聚集现象的行为抽象,在工程优化过程中起到局部寻优的作用。趋化行为主要由两个操作实现,即翻转和游动。翻转操作可以搜索到一个适应度值好的方向,游动则是朝着适应度值好的方向移动。趋化操作通过翻转和游动反映细菌的探索和觅食行为,实现位置更新。
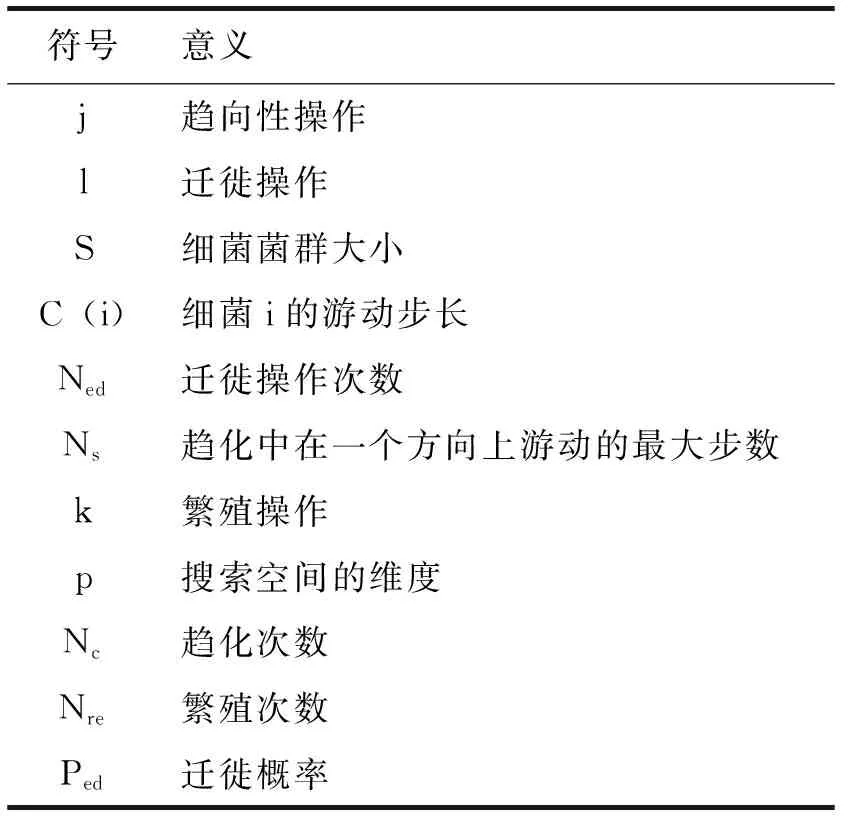
表1 符号意义表
BFO算法中先随机初始化一组菌群:
p=p0+η*(pmax-pmin)
(1)
其中,pmax是优化区间的最大值,而pmin则是最小值,p0∈[pmin,pmax]为细菌初始位置,η∈(0,1)为随机数。假设菌体i经过了j次趋化、k次繁殖、l次迁徙后的位置为p(i,j,k,l),εi为菌体i的趋化步长,ηi为任意的随机方向向量,则本次趋化操作后细菌的位置按如下公式更新为:
(2)
1.1.2 繁殖操作
BFO算法执行趋化操作后,根据竞争法则,部分觅食能力弱(适应度值低)的细菌会被淘汰。为维持菌群规模不变,剩余的觅食能力强(适应度值高)的细菌会自我繁殖。若细菌已经经过了Nc次的趋化操作,则在繁殖和迁徙次数固定的前提下,细菌菌群总的适应度值可以定义为健康度,其值与细菌菌群中细菌的个数相关,因而可以定义为:
(3)

1.1.3 迁徙操作
由于温度、酸碱度以及食物等环境因素的改变,细菌菌群可以迁徙到更易于生活的区域。虽然迁徙操作会破坏细菌的局部趋向行为,但却能够在全局中寻找的更优的区域。算法会在细菌繁殖后的一段时间内,以给定概率随机分配在搜索空间中,新产生的个体有可能获得更好的适应度值,这也可以避免算法早熟收敛。
从以上经典的细菌觅食优化算法过程中,可以看出,随机布点的方式初始化菌群,无法广泛均匀地覆盖到整个搜索空间,造成菌群多样性不高,降低了算法的寻优能力。
1.2 熵视觉显著性
视觉显著性原理是在对人类视觉系统形成过程进行生物学的研究基础上提出的一种视觉计算模型,研究初期主要包括Bottom-up和Top-down两种模型[9],近期的研究方向更多倾向于两种模型的结合,其中与熵理论结合而提出的熵视觉显著性[10]计算模型得到较好的应用。为简便计,这里仅在连续域内阐述熵视觉显著性原理。假设给定一尺度s,对于图像中局部显著性部分(或点)x来说,定义熵连续函数:
JD(s,x)=HD(s,x)•WD(s,x)
(4)
其中,D为连续可积空间,HD(s,x)为区域D中的熵函数,其定义为:
(5)
其中,p(d,s,x)为采用描述子d后区域D中的熵,而WD(s,x)为区域内显著性函数,其定义为:
(6)
事实上,寻求熵视觉显著性的区域(或点)本质上就是对熵函数求极值部分(或点),也即:
(7)
如果找到极值部分(点),则将其回代到熵连续函数
JD(sp,x)=HD(sp,x)•WD(sp,x)
(8)
即可得到熵视觉显著性区域(或点)。
1.3 随机佳点集
佳点集理论是由数学家华罗庚提出的,运用佳点集选择点比随机选取点的偏差要小得多。许多学者利用佳点集理论用于群智能算法的改进,并应用于优化算法[11,12]中,获得了很好的效果。
1.3.1 佳点法生成初始菌群
群智能优化算法中的种群初始化操作对算法的全局搜索能力[13]有重要的影响,随机化生成保证了种群的多样性,但是无法均匀覆盖到全部搜索空间,文献[14]中提出的佳点集法可使点集在解空间中均匀分布,且使点集精度和问题维数无关。
佳点集法初始化菌群的具体步骤如下(以二维为例):
1)初始化参数,设菌群的规模为N,第1个点的二维分量值为:
r1=e-⎣e」,r2=e2-⎣e2」
(9)


(10)

采用佳点集方法的缺陷在于生成的菌群在搜索空间中线性递增分布,细菌个数一致则每次得到的结果一致,无法保证生成菌群的多样性,搜索空间中的很多点也无法取到。本文解决这一问题的办法是引入随机化机制。
1.3.2 随机佳点集法
在佳点集法的基础上,加上一个随机平移量,即得到随机化佳点集法,过程如下(以二维为例):
2)设菌群规模N,随机平移量Δ为(x表示取x的小数部分):
(11)
3)对当前细菌的位置向量进行随机平移,就得到新位置向量:
(12)
由此得到的点集即是经随机化佳点集方法生成的点集。随机化佳点集法很好地兼顾了覆盖全局搜索空间和布点的随机性两个方面,使生成的菌群均匀又不失多样性。
2 改进的细菌觅食优化的彩超图像增强
彩超图像的彩色化本质上是三个同尺度的灰度图像在不同色彩坐标上的合成,因而彩超图像增强效果依赖灰度图像增强技术。
针对于灰度图像,Tubbs提出的不完全Beta函数[15]中有两个调节因子,依靠这两个调节因子的最佳匹配,可以获得各种变换曲线,因而采用不完全Beta函数可以对灰度图像进行自适应地增强。
用不完全Beta函数拟合图像变换曲线需要先对图像进行归一化操作,归一化的变换函数F(u)定义为:
(13)
其中,u为图像像素,α和β即为调节因子,B(α,β)为Beta函数:
(14)
确定不完全Beta函数两个参数α和β的过程并不直观,没有统一的方法。传统方法包括穷举法和人工介入法。若采用穷举法,会因计算量过大而导致算法效率急剧降低;而采用人工设置参数的方法,会因主观性过强而导致图像增强一致性无法保证。本文将利用BFO算法在α和β的参数空间中进行全局搜索,以便获得最优参数对。
图像增强问题变为最优化问题时,需要先对适应度值进行计算,在每次迭代计算时,适应度值都要与事先设定的阈值比较。适应度函数决定优化算法中个体寻优进化的动力,本文采用了三个图像增强因素,即:均方根误差AE、信息熵E和峰值信噪比PSNR,假定存在一对给定M×N的图像组(其中V表示增强后的图像,O表示原始图像),则其定义如下:
(15)
(16)
(17)
其中,i∈[0,L-1],L为图像中所有可能的灰度级数量总和,pi为第i级灰度值出现的概率。
为了兼顾图像三个方面的度量标准,在将以上度量归一化以后,设计了能够更全面反映图像信息的适应度函数如下:
F=E+AE+PSNR
(18)
本文所提出的基于改进细菌觅食优化的彩超图像增强算法主要实现步骤如下:
步骤1 将彩超图像从RGB空间转化为HSV(即色调、饱和度、亮度)空间;
步骤2 保留H和S,单独对V图像进行熵视觉显著性检测,利用公式7和公式8可以获得视觉显著性点集;
步骤3 对视觉显著性点集中的显著性点进行随机佳点的选择,利用公式9~公式12反复进行筛选,可以得到随机候选佳点,将其作为细菌觅食算法的初始菌群;
步骤4 调用细菌觅食优化算法,获得增强的亮度图像V’;
步骤5 将HSV’组合后转换到RGB空间中,即可获得增强后的彩超图像。
3 实验与讨论
本文所涉及的彩超图像来自于某医院彩超诊断室的数据库中,实验数据送至电脑端,并利用MATLAB环境进行仿真测试。
为寻找最佳增强效果,本文曾试图将经典的图像增强算法应用到原始彩超图像中,所获得的结果如图1所示。
(a)原始图像 (b)直方图变换

(c)小波变换 (d)视觉感知图1彩超图像应用经典的图像增强算法后效果对比图Fig.1 Comparison of the enhanced effects of the color ultrasound based on the classical image enhancement algorithms
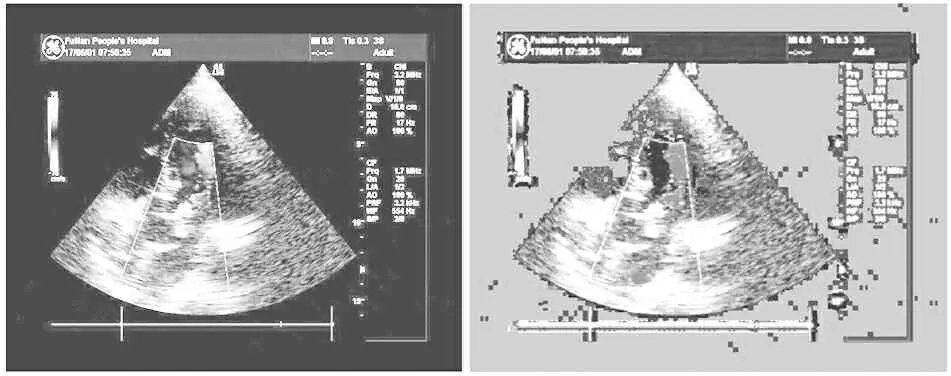
由图1可以看出,经典的图像增强算法不能获得良好的图像增强效果,也很难为医(疗)学提供足够的感兴趣的信息。同时,由于选择参数不同,因而也不能实现自适应的过程,以基于视觉感知的多尺度视网膜算法举例,调节不同的高频(hf)、中频(mf)和低频(lf)截止频率(单位为Hz)可以获得不同的增强效果,如图2所示。
(a)原始图像 (b)lf=7,mf=15,hf=21
(c)lf=10,mf=40,hf=80(d)lf=20,mf=100,hf=200
可以从图2中看出,随着截止频率逐渐提高,彩超图像中的阴影部分扩散程度越来越深,图像边缘部分出现了色晕现象。显然,无论采用(b)-(d)中的哪个增强图像,均不能为医(疗)学提供可靠的病理依据。
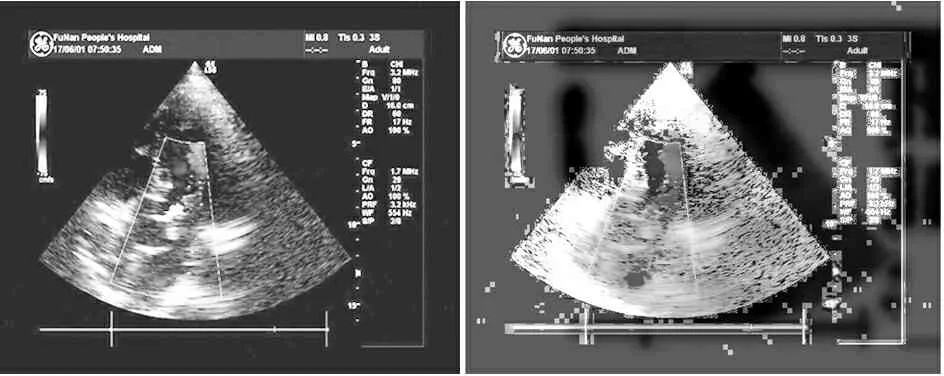
为检测所提算法的有效性,本文设计了多种实验,其中硬件环境为Intel双核i7-6500U,内存16GB,仿真软件采用Matlab2018b。考虑到本文所提算法的先进性,因而与之对比的优化算法选择了模因[16]算法和杜鹃[17]算法。根据本文所提算法的步骤,将首先将彩超图像由RGB色彩空间转换到HSV色彩空间中,如图3所示。
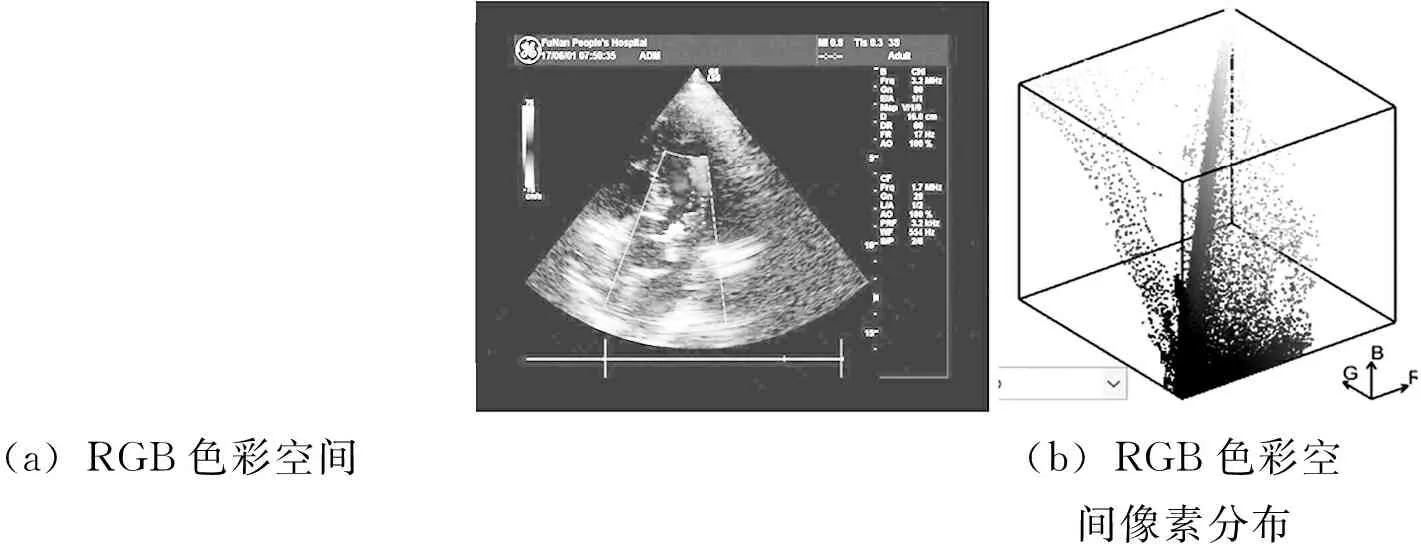
(a)RGB色彩空间(b)RGB色彩空间像素分布
(c)转换到HSV 色彩空间(d)HSV色彩空间像素分布
从图3(b)列和(d)列可以看出,彩超图像中大量像素点位于靠近色彩空间原点区域附近,这主要因为彩超图像背景较暗。从图3(c)列可以看出,彩超图像在HSV色彩空间的图像很难理解,因而如果增强过程主要是在HSV空间的话,必须将其转换回RGB色彩空间中才能被接受。在算法中保留原始图像的色调和饱和度,可以令增强后的图像颜色失真小,而单独对亮度图像进行增强则可以提高算法运行效率。
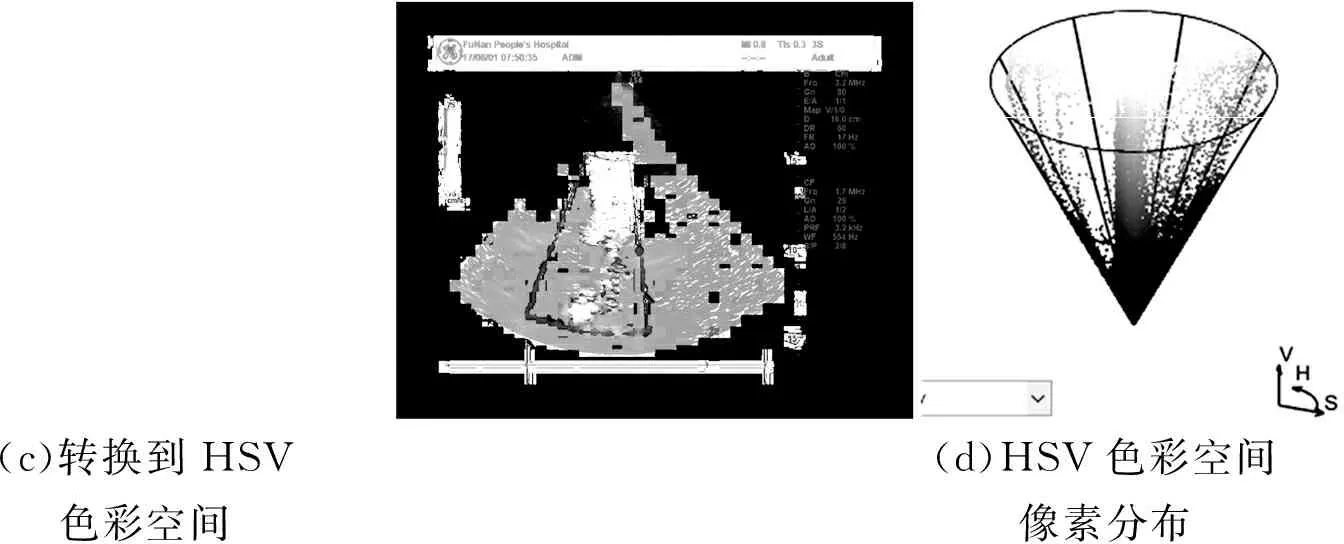
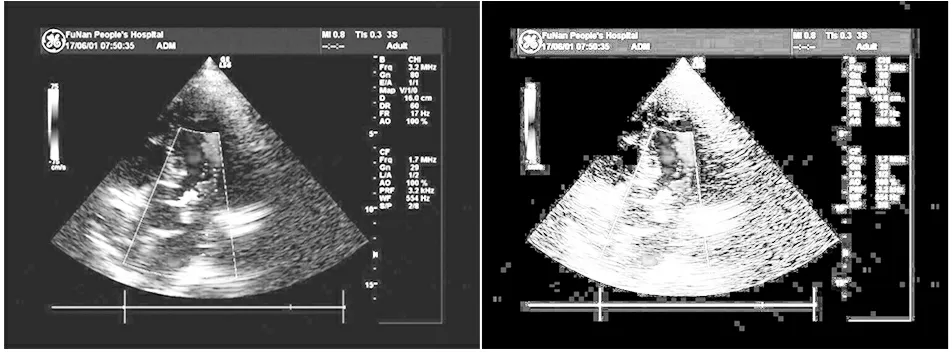
对亮度图像进行熵视觉显著性及随机佳点法生成的结果如图4所示(菌群规模用Ω表示)。
(a)原始图像(b)亮度分量的熵视觉显著性点集
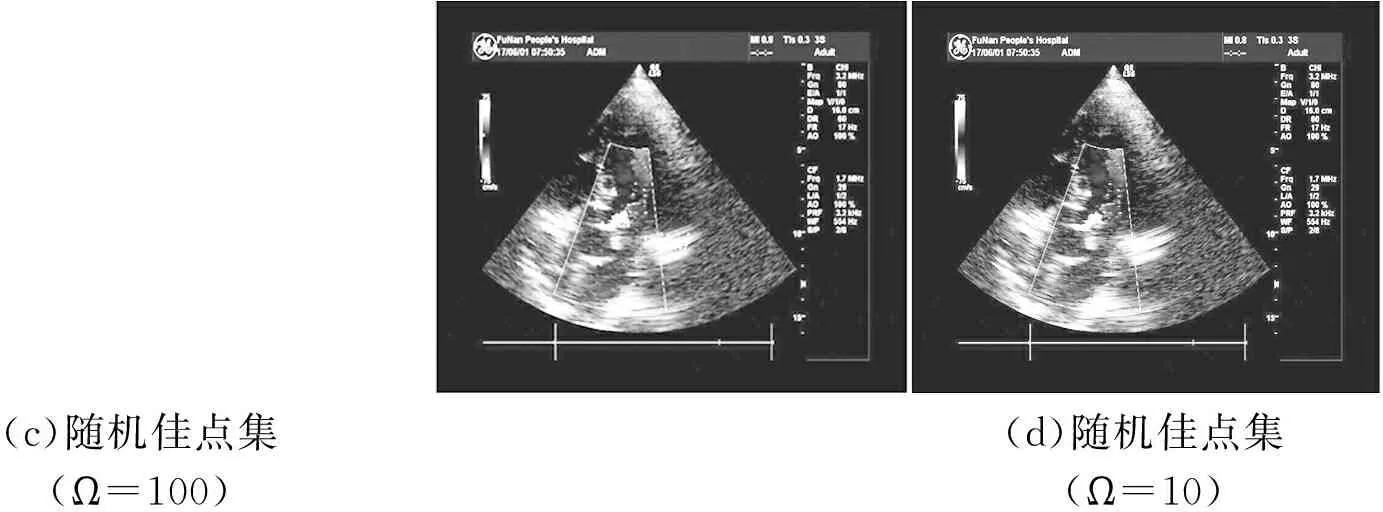
(c)随机佳点集(Ω=100)(d)随机佳点集(Ω=10)
从图4(b)列可以看出,彩超图像经过熵视觉显著性检测后得到了较多的显著性点,以此构成显著性点集(品红色区域),而图4(c)列和(d)列则是在菌群规模分别设定为100和10时所得到的结果,菌群规模数大时,全局寻优能力较强,算法计算量大,运行效率较高,本文中选择菌群规模数为20,可以避免算法过早收敛。在经过细菌觅食优化算法获取得到较好的调节因子后,将增强后的彩超图像分别与模因算法及杜鹃算法所获得的结果进行对比,如图5、图6所示。
(a)原始图像 (b)模因算法
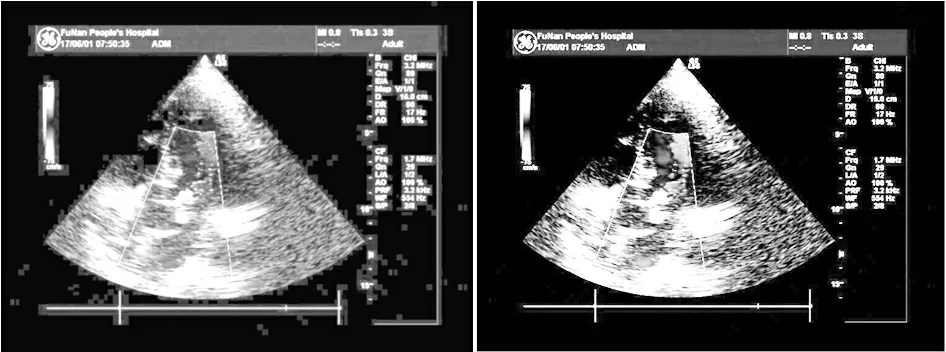
(c)杜鹃算法 (d)本文算法图5 心脏彩超增强后的结果对比Fig.5 Comparison of the enhanced results of heart color ultrasound images

(a)原始图像 (b)模因算法
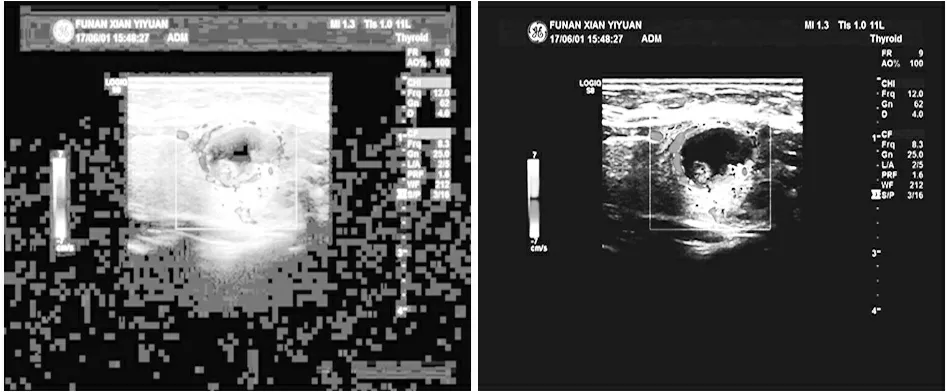
(c)杜鹃算法 (d)本文算法图6 甲状腺彩超增强后的结果对比Fig.6 Comparison of the enhanced results of thyroid gland color ultrasound images
图5所示为主动脉瓣狭窄且存在少量反流的心脏彩超图像。图6所示为存在结节的甲状腺彩超图像。综合图5与图6可以看出,模因算法可以一定程度上增强图像信息的丰富程度,但易融入噪声,图像颗粒感较重。杜鹃算法可以得到较为平滑的图像,然而增强后的色彩失真度很大,难以保证颜色恒常性特性。同时,模因算法和杜鹃算法在应用时,针对图像的局部区域特别是边缘部分,过分增强边缘信息,因而存在较为明显的伪轮廓现象。本文所提出的方法不仅增强了图像的可视效果,丰富了图像的背景和前景的立体关系,而且在颜色恒常性方面获得良好的效果。
由于本文所提出的算法中在计算适应度值的过程中,已经加入了对图像客观性指标的计算,即均方根误差(Average Error,记作AE)、峰值信噪比(Peak Signal to Noise Ratio,记作PSNR)和信息熵(Entropy,记作E),这里再给出一个重要指标,即结构化内容[18](Structure Content,记作SC),其定义如下:
(19)

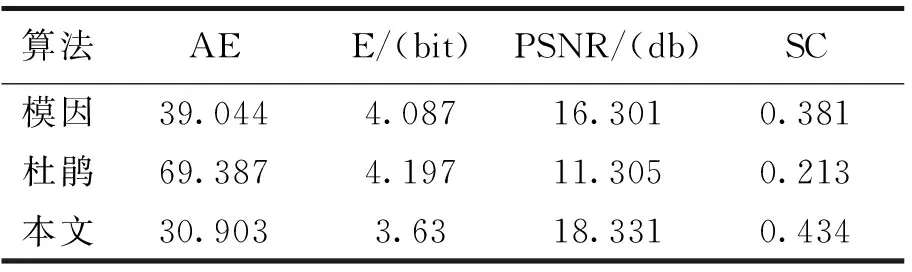
表2 心脏彩超图像增强客观性指标对比
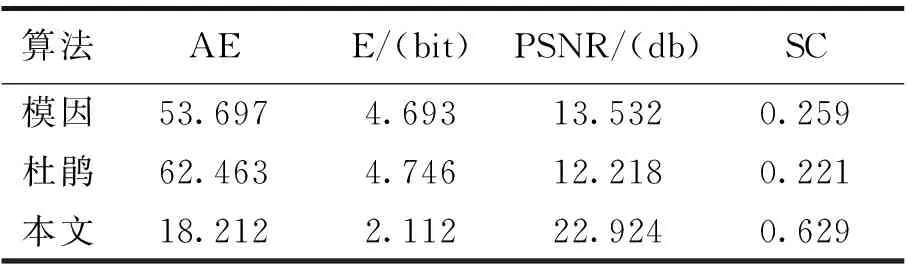
表3 甲状腺彩超图像增强客观性指标对比
由表2和表3的数据可以看出,本文所提算法在均方误差的数值上最小,说明与原始图像之间在L2范数上距离最小;信息熵最小说明增强图像中信息更加均匀,不稳定因素最小;峰值信噪比最大说明图像所要表达的信号强度更好,杂散噪声更小;结构化内容数值最大说明增强后的图像与原始图像在相似程度上最高。
4 结语
针对目前彩超图像增强算法仍然沿用经典算法,从而导致计算量大、人工介入过多以及增强效果一致性差得缺点,提出了一种改进细菌觅食优化图像增强算法,即利用熵视觉显著性和随机佳点理论得到细菌觅食优化算法的初始菌群,而后根据均方误差、峰值信噪比和信息熵计算适应度值,以便对图像调节因子进行优化。通过主、客观实验和分析可以看出,改进细菌觅食优化图像增强算法具有良好的视觉效果、自适应能力强以及增强结果一致性的特点。