基于云平台的智能化水质采样飞行机器人研究
2020-05-09严钦豪吴晓春
严钦豪 吴晓春
(1.武汉理工大学 管理学院,湖北 武汉 430070;2.武汉理工大学 航运学院,湖北 武汉 430060)
0 引言
随着社会经济迅猛发展,水环境污染问题呈现、污染多样化、程度严重化的趋势。为了加强水环境质量监控,及时掌握水质现状情况,确定水体中污染物的时、空分布状况,进而追朔污染物的来源、污染途径及对人体健康的影响,需要进行实地水质取样等工作。但是,现有水质检测取样工作,主要由人工完成,当出现水源面积较大、天气恶劣、水质外部环境复杂(如森林内湖泊)等情况,就需要加大人力成本,同时,也存在一定作业危险。
目前,我国机器人产业被纳入国家科技创新的重点领域,以机器人科技为代表的智能产业蓬勃发展,成为科技创新的重要标志[1]。如何将水环境保护中的水质取样、存储和运输过程与机器人技术有机结合,从而逐步取代水环境保护领域的人工作业,将是环保领域科技发展的趋势。
1 研究方法
一种替代人完成复杂环境下的污水监测作业的机器人,具有操控简单、功能齐全、视野广阔、快速搜索目标和高效避障的特点,能大幅提高监测作业效率、降低劳动成本、减少工作人员作业风险。主要基于互联网云平台、计算机视觉辅助巡检系统和仿生原理等方法进行研究。
1.1 智能化全自主水质采样
根据湖泊生态治理紧迫需求,针对工作人员长时间划船去湖面中心去取样检测水质的问题,使用智能手机的互联网云平台作为操控平台,将智能手机与空中飞行机器人的飞控系统进行信息融合,使其在不依赖于传统遥控器情况下,可对飞行机器人设置具体任务。通过使用智能手机中的地图APP数据库与GPS卫星数据对飞行机器人在空中进行精确定位以及自主导航,从而实现飞行机器人全自主完成飞行任务作业,实现智能化全自主水质采样[2]。
1.2 计算机视觉辅助的巡检系统
加强视觉辅助系统的协同研发,通过融合飞行机器人视觉辅助系统,实现对飞行机器人巡检场景的感知与巡检作业,完成三维空间复杂环境的巡检任务,实现定时、定位、定样的水质采样。同时,可以实时地通过无线图像传输模块将机载摄像头中的视频图像发送到地面站,集控室控制人员从地面站接收视频信息,根据巡检任务需求和环境需求选择适当的巡检模式,对室外或路面不平坦时巡检采用飞行巡检。巡检视野广阔且搜索快速,大幅提高巡检作业效率、降低劳动成本、减少人工作业风险。
1.3 利用仿生原理的水质采样系统及装置设计
利用蜻蜓在水面产卵时点水的原理,以及蝴蝶吸收花蜜过程中的虹吸原理等特点,针对小型飞行机器人采水装置要求精致、多格、悬空采集等需要,在控制系统中,重点参考蜻蜓在水面飞行的稳定性系统和蝴蝶采集花蜜的虹吸特点。同时,设计飞行机器人自带水样储存装置,为了实现一次多点采集,还考虑将储存装置设计为多格,采水吸管实现多条或者分段采样、分段储蓄。采水装置包括盒状的箱体、吸管、蠕动泵、旋转轴、小电机等设置。装置设计既要体现采水样时的稳定性,也要保证采水吸管容易缠绕打结等问题。分段采样时,蠕动泵体和采样管中会存留采样的残液,程序设计中还考虑采样后通过虹吸原理将蠕动泵体和采样管中的残液排空、冲洗干净后,再进行采样。
2 智能仿生采样机器人系统及装置设计
基于云平台的智能化水质采样飞行机器人主要分为3部分:飞行系统、视觉辅助系统、智能手机终端。
2.1 空中巡检机器人飞控系统
将智能手机平台作为云控制终端,通过使用智能手机作为操控平台,将智能手机与飞行机器人飞控系统进行信息融合,使其在不依靠传统遥控器情况下,对机器人设置具体任务,通过融合机器人视觉辅助系统实现对机器人的巡检场景的感知与理解,完成三维空间复杂环境的巡检任务。设计的智能机器人总电路包括单片机最小系统模块,与单片机最小系统模块相互连接的气压计定高模块、无线遥控传输模块、液晶显示模块以及陀螺仪加速度模块、图像保存模块以及电机驱动模块等。研究适用摄像头的5.8GHz频率的无线图像传输电路和摄像头图像处理系统,[3]摄像头实时采集机器人的视觉信息,经5.8GHz频率的无线图传传输到地面站监控台,人工操作图像信息完成,实现视觉辅助定位。
基于智能手机和视觉辅助的空中巡检机器人飞控系统具体的巡检方法如下。
步骤1:系统初始化,包括陀螺仪加速度模块、气压计定高模块、摄像头模块以及电机驱动模块的初始化。
步骤2:检测机器人电池电压,经AD处理和CPU计算出其电压数值,并将电压数值和调试参数显示在液晶显示模块上。
步骤3:应用开源APP经信号转换,由无线遥控传输模块向飞控系统发送解锁信号,读取后经单片机最小系统模块处理,最后对飞控系统进行解锁。
步骤4:读取智能手机终端发送来的操控信息,并在单片机最小系统模块内部进行信号处理分析与计算,将其操控信息转化为空间位置信息。
步骤5:读取摄像头模块图像信息。
步骤51:经无线图像传输模块,将读取的摄像头模块图像信息发送到地面站,并在液晶显示模块上进行实时图像显示。
步骤52:通过对读取的遥控信息进行分析,判断是否需要对飞控系统上的图像信息进行现场保存。
步骤6:再次检查机器人电池电压,判断是否需要报警模块报警。
步骤7:读取气压计定高模块、陀螺仪加速度模块信号,并经算法处理得出对应的高度信息和角度信息。
步骤8:将高度信息和角度信息与无线遥控传输模块发送来的遥控信号相融合,融合成最终机器人需要达到的目标信息。
步骤9:将最终的目标信息,转化成电机的控制信号PWM信号[4],将各路PWM信息定到各自对应的电机驱动模块控制电路中。
2.2 智能飞行机器人仿生虹吸采水装置设计
由于水质采样过程中,水体分布不均匀、环境恶劣、取样时的局限性等多因素的制约,做好“仿生虹吸采水装置”设计,包括盒状的箱体、固定挡板、用于实现吸水管放下与收缩的旋转轴、用于储存检测样品的蓄水池以及用于将湖水从吸水管吸入并排出到蓄水池中的蠕动泵等。本取样装置设计目的在于,可以能够在任何水域实现快速自主取样,设置好航线实现取样后自主返航在指定位置。本装置设计主要结构包括:箱体、旋转轴、蓄水池、胶管、蠕动泵、单片机、电机、位移码盘。具体结构设计如图1所示。
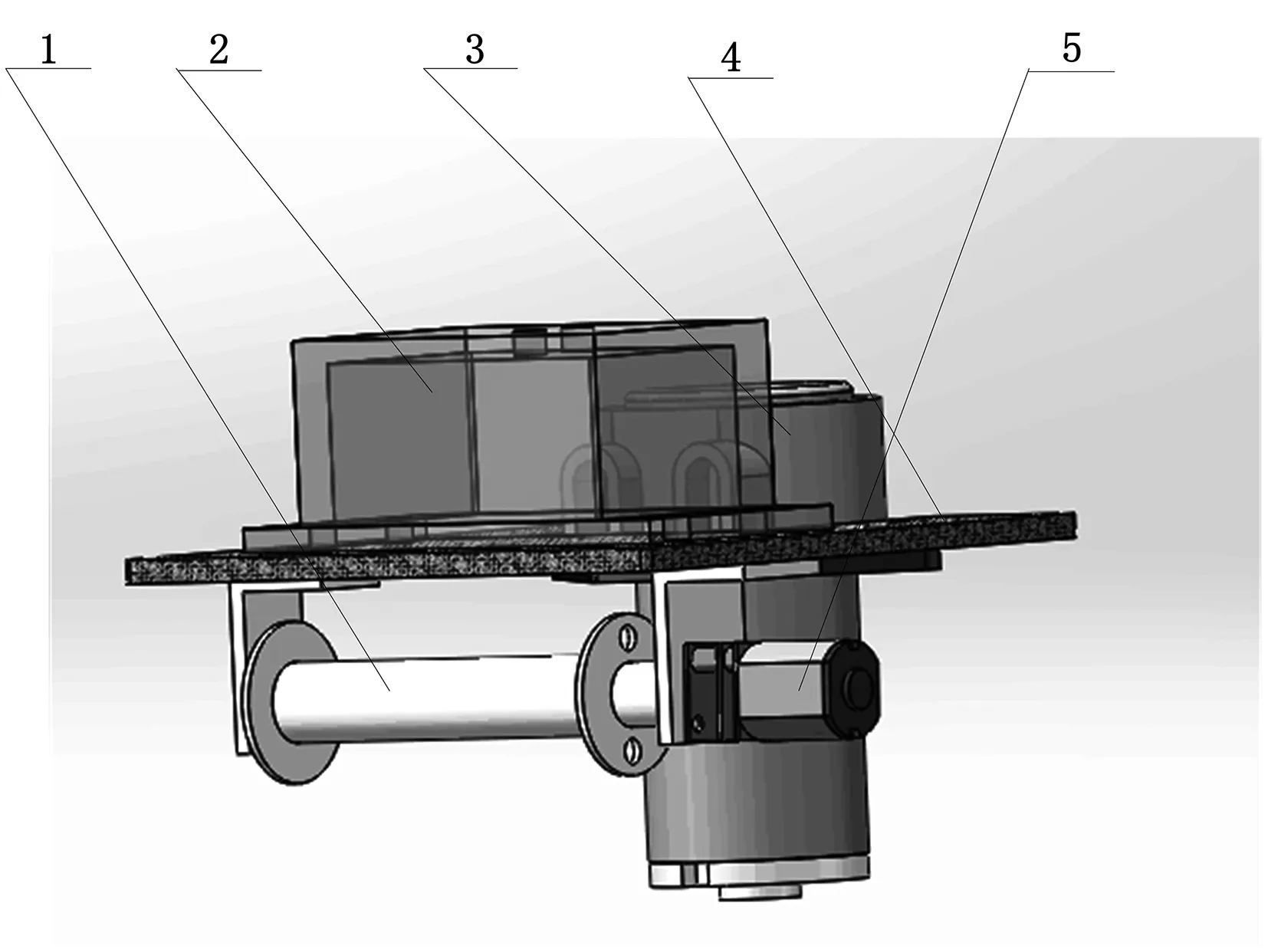
图1 污水采集装置
1 旋转轴;2 蓄水箱;3 蠕动泵;4 固定挡板;5 电机
2.3 智能飞行机器人水质采样装置高度控制系统
为保证采水飞行机器人工作的稳定性,在设计中通可以设置机器人离水面的高度值为h1,其高度可以通过机器人的超声波检测反馈到手机客户端,当需要取样水面下h2处的水样,通过电机配合码盘记录旋转轴将软管放入水中h2处时已经放下的软管总长度为h。一般情况下软管长度不宜超过5米。所以应满足下面几组关系式:
污水采集装置取样过程原理图如图2所示。

图2 水质取样过程原理
3 结语
基于互联网云平台控制的水质采样飞行机器人的成功研制,通过多次试点试验,使之能够具备通过指令自主运行到达指定位置,通过特殊处理的蠕动泵将水样吸入特定的储水箱中,并可以通过飞行器上的拍摄装置将实施的情况传输给后台等水质采样功能,从而实现三维空间复杂环境的巡检、大幅提高巡检作业效率、降低劳动成本、减少维护人员作业风险的目的,优化水环境水质采样方式。
