考虑铁损的永磁同步电动机模糊自适应约束控制
2020-04-20邹明峻马玉梅刘加朋于金鹏
邹明峻,马玉梅,刘加朋,于金鹏
(青岛大学 自动化学院,山东 青岛 266071)
0 引 言
永磁同步电动机(PMSM)因具有结构简单、调速范围宽、能量转换效率高等优点被广泛应用于生产生活的各个领域。但电动机参数变化、负载转矩干扰等不确定因素致使其成为一个多变量、强耦合的复杂非线性控制对象,传统的矢量控制[1-2]和直接转矩控制[3]方法难以获得良好的动态响应。此外,为增大功率密度、减小铜耗,PMSM的极对数相比异步电动机往往较多,在转子速度相同时,其工作频率更高、铁芯损耗较大,导致电动机发热量增大、温度升高,而过高的温度会使PMSM永磁体退磁。因此,必须考虑铁损对电动机各项控制性能的影响。
近年来,许多学者将现代控制理论应用于永磁同步电动机驱动系统相关控制问题的研究中,如自抗扰控制[4-6]、滑模变结构控制[7-8]和反步法[9-10]等。其中,反步法作为构建控制器最有效的方法之一引起了越来越多研究者的关注,但传统反步法无法处理系统中未知的非线性函数项。文献[11-12]考虑到具有未知函数的非线性系统,在反步法的基础上提出了将模糊逻辑系统与自适应控制技术相结合的控制方法,克服了系统建模不充分和系统参数变化等不确定因素影响。然而,上述控制方法没有考虑到状态约束问题。
在许多实际工程应用中,系统的状态量需要被限制在合理的范围内,超出约束范围可能对系统性能产生影响,使系统出现故障,甚至威胁人身安全。例如在工农业生产过程中,电动机的转子机械角速度超过给定的范围会使设备的生产效率和安全性降低;过大的励磁电流会使电动机绕组发热,产生严重的热损耗,加速绝缘老化,缩短电动机使用寿命。为了解决传统反步法无法约束状态变量的问题,学者们提出了势垒Lyapunov函数[13-15],对系统的状态和输入进行约束,使被控对象的状态量和控制量限制在合理的区间。在目前阶段,将基于势垒Lyapunov函数的模糊自适应反步控制方法应用到考虑铁损的PMSM驱动系统中仍然是一个尚未完成且具有挑战性的课题。
综上所述,本文提出了一种基于势垒Lyapunov函数的模糊自适应反步控制策略,设计了考虑铁损的PMSM位置跟踪控制器。所提出的控制方案具有以下优点:
1)选取考虑铁损的PMSM模型为研究对象,有助于提升控制策略的控制性能、降低能量损耗;
2)采用势垒Lyapunov函数约束变量幅值,将系统的状态量限制在给定的约束区间内,在保证系统稳定性的同时兼顾了安全性;
3)与文献[11]相比,仅使用一个自适应律,减轻系统在线计算负担,易于工程实现。
仿真结果表明了所提出控制策略的有效性。
1 数学模型及初步变换
基于同步旋转坐标(d-q),建立考虑铁损的PMSM动态模型[16-17]:
其中:Θ,ω,J,TL和np分别为转子角位置、转子角速度、转动惯量、负载转矩和极对数;id和iq为d,q轴定子电流;iod和ioq为d,q轴的励磁电流;ud和uq为d,q轴定子电压;Ld和Lq是定子电感;Lld和Llq是定子漏感;Lmd和Lmq是励磁电感;Rs和Rf表示定子电阻和铁芯损耗电阻;λPM表示转子永磁体产生的励磁磁通。为了简化上述动态模型,定义如下新变量:

则考虑铁损的PMSM的动态模型可表示为
(1)
控制目标是设计控制律ud和uq,使x1跟踪期望轨迹xd;同时,确保PMSM驱动系统的所有状态变量始终被限制在给定的紧集Ωx内,其中Ωx:={|xi|≤kci,i=1,2,3,4,5,6},kci为正常数。


2 控制器设计
由反步法原理定义如下误差变量:
z1=x1-xd,z2=x2-α1,z3=x3-α2,
z4=x4-α3,z5=x5,z6=x6-α4
(2)
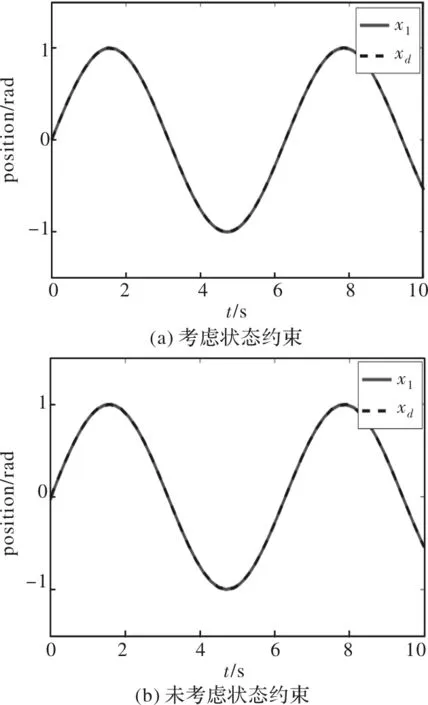
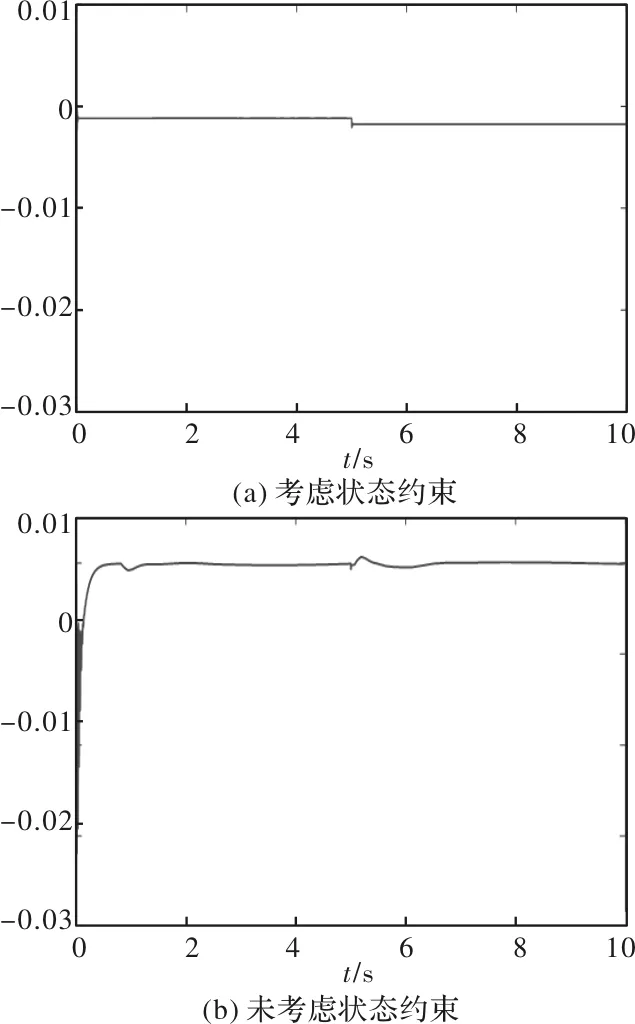
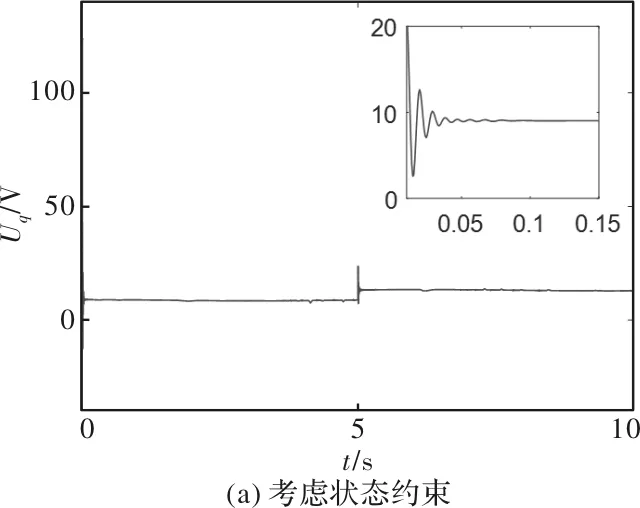
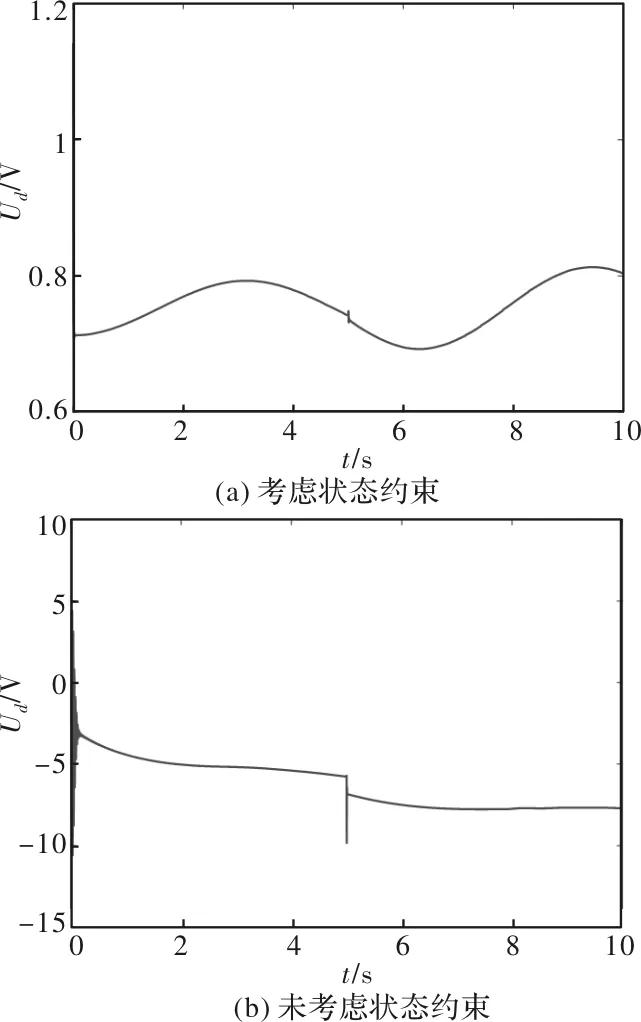
其中,xd为给定期望信号,αi(i=1,2,3,4)为利用势垒Lyapunov函数设计的虚拟控制律,其具体结构将在下面的设计过程中给出。定义紧集Ωz:={|zi| Step1 选取势垒Lyapunov函数 对V1求导得: (3) (4) 其中k1为大于零的常数,则可得: (5) Step2 选取势垒Lyapunov函数 对V2求导可得: (6) 注意到实际负载转矩TL为有限值,假设其上限为d>0,则有0≤|TL|≤d。利用杨氏不等式可得: 其中ε1为任意小的正数。式(6)可表示为: (7) (8) 选取虚拟控制律α2: (9) Step3 选取势垒Lyapunov函数 求导后可得: (11) 根据引理1,对于任意给定的ε3>0,有: (12) 选取如下虚拟控制律α3: (13) 将式(12)、式(13)带入式(11),可得: Step4 选取势垒Lyapunov函数 对其求导可得: (15) (16) 设计真实控制律uq: (17) 将式(16)、式(17)带入式(15),可得 Step5 选取势垒Lyapunov函数 (19) (20) 构造虚拟控制律α4: (21) 将式(20)和式(21)代入式(19),可得: Step6 选取势垒Lyapunov函数 求导后可得: (23) (24) 构建真实控制律ud: (25) (26) Step7 选取系统的Lyapunov函数 则可得: (27) 选取如下自适应律: (28) 其中r,m和li(i=2,3,4,5,6)均为正数。 将式(28)代入式(27),可得: (29) 由杨氏不等式可知: (30) (31) (a)建立基于势垒Lyapunov函数的模糊自适应控制器对考虑铁损的PMSM驱动系统进行控制,并选择控制器参数:k1=10,k2=7,k3=100,k4=50,k5=20,k6=30,r=0.05,m=0.02,l2=0.25,l3=0.25,l4=0.25,l5=0.25,l6=0.25。限制电动机的状态:|x1|≤2,|x2|≤30,|x3|≤30,|x4|≤30,|x5|≤30,|x6|≤30。选择最优设计参数:kb1=1,kb2=30,kb3=30,kb4=30,kb5=30,kb6=30。 (b)将未考虑状态约束的模糊自适应控制器与本文所提出方法进行对比仿真,选取相同的控制器参数和电动机参数。 仿真结果如图1~图6所示,其中图1(a)~图6(a)是本文所提出的基于状态约束的模糊自适应控制器的仿真结果;图1(b)~图6(b)为不考虑状态约束的控制方案仿真结果。图1为x1与xd的波形对比,图2为跟踪误差z1的曲线,图3和图4展示了系统的状态空间,图5和图6为uq和ud的波形。当t=5 s时,仿真模拟了负载转矩发生变化的情况,由跟踪图可知,在存在负载扰动的情况下,两种控制方案都可获得满意的跟踪结果。 注2 图1(a)、图3(a)和图4(a)中系统的状态变量都被限制在紧集Ωx内,而图3(b)中状态x3幅值的变化区间为[-20,40],超出了给定的范围。仿真结果表明本文提出的基于状态约束的模糊自适应控制器具有良好的鲁棒性和抗干扰能力,在满足各种约束条件下实现了PMSM的位置跟踪控制,更符合实际应用的需要。 图1 x1和xd的波形 图2 跟踪误差z1的曲线 图3 x2,x3和x4的运动轨线 图4 x2,x5和x6的运动轨线 图5 q轴电压 图6 d轴电压 本文将基于势垒Lyapunov函数的模糊自适应反步方法应用于考虑铁损的PMSM位置伺服控制中。相比较传统反步控制策略,本文提出的基于势垒Lyapunov函数的控制方法对电动机的状态量进行了约束,在保证系统控制稳定性的同时兼顾安全性。此外,考虑了铁损对PMSM驱动系统的影响,提高控制策略的控制性能、降低能量损耗。仿真结果表明了本文提出的方法在保证状态约束的同时实现了良好的跟踪控制效果。






3 稳定性证明


4 仿真结果分析



5 结 论