一种电动汽车用三相异步电机控制策略
2020-04-18赵许强迟久鸣
赵许强,韩 冰,迟久鸣
(中车青岛四方车辆研究所有限公司,山东 青岛 266112)
0 引 言
异步电机具有体积小、重量轻、成本低、坚固耐用、免维护等优点,是电动汽车驱动电机极具竞争力的选择[1]。异步电动机控制技术主要包括压频控制、转差频率控制、矢量控制和直接转矩控制,而在电动汽车上的应用则主要采用后两种。矢量控制技术是一种实现电机转矩和磁链的解耦控制的方法,从而可以对它们分别进行控制,即可得到与直流电机相同的控制特性。这种控制方法精度高、动态响应快、起动转矩大,近几年来,矢量控制技术在电动汽车异步电动机控制系统中应用较多。由于电动汽车的行驶特点,需要对电机进行转矩控制和转速控制,本文采用基于转子磁场定向的矢量控制技术。
电动汽车用异步电机经常运行于基速以上,且最高转速远大于额定转速,加上汽车动力电池电量低时输入电压较低,为使电机的转速能达到最高转速且满足恒功率输出的要求,需要采用弱磁控制。弱磁控制的目标是,在满足电机及逆变器的电流和电压限制下得到最大化的电机转矩输出和功率输出,常用的弱磁控制算法包括1/ωr方法、基于电机模型的方法、基于电压检测的方法和基于建立查询表的方法,本文采用基于等效电压闭环和最小定子电流的弱磁控制方法。
电动汽车传动系统是一个欠阻尼的系统[2],异步电机输出转矩存在波动, 在低转速区域波动对电机输出特性的影响比较明显, 波动会引起整车传动系统低速抖动, 并且容易引起传动系统的共振[3],为解决电动汽车低速抖动问题,本文采用了一种通过转矩补偿来抑制低抖动的控制方法。为提高电动汽车高速限速时的舒适性,通过电机加速度提前降低电机输出转矩,防止产生转速过高后限速导致的汽车顿挫感。当电机转速采集出现意外故障,为确保人车安全,本文将基于全阶磁链观测器的转速估算方法应用到电动汽车异步电机控制中。
1 弱磁控制
电动汽车用三相异步电机控制策略框图见图1,整个矢量控制系统由转矩转速外环、电流内环组成。转矩转速外环实现转速估算、低速防抖和高速限速,电流内环实现弱磁控制和电流控制。
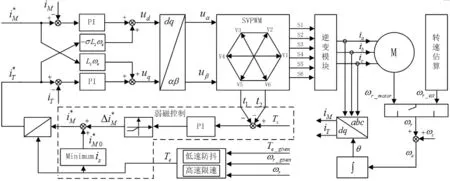
图1 电动汽车用三相异步电机控制策略框图
转子磁场定向采用间接磁场定向,电机转子角频率ωr和转差角频率ωs之和为同步角速度ωe,同步角速度ωe积分后得到转子磁链角度θ。转差角频率ωs由电机稳态式(1)和式(2)得到。
(1)
|ψr|=LmiM
(2)
式中,Tr为转子时间常数,Lm为电机互感,iM为励磁电流分量,iT为转矩电流分量,ψr为转子磁链。
根据转子磁链角度θ,对电机输入三相电流ia、ib、ic经过CLARK和PARK变换,得到dq旋转坐标系下的分量,其中d轴分量为励磁电流分量iM,q轴分量为转矩电流分量iT。通过PI调节对励磁电流iM和转矩电流iT分别进行控制,实现对转子磁链和输出转矩的控制。为了消除定子d、q轴电压间的耦合关系,采用前馈解耦控制,实现定子两轴电压对相应定子两轴电流的独立控制,以加快电机控制的响应速度,提高电机在中高速运行段的控制效果。
电流内环输出为定子电压,经SVPWM调制输出逆变模块六个开关管的驱动信号。SVPWM空间复平面由6个基本电压矢量和2个零电压矢量构成,即定子电压Vs由这8个电压矢量合成。以定子电压Vs位于第一扇区为例(如图2所示),定子电压Vs可表示为
(3)
式中,Ts为开关周期,t1、t2为开关周期内两个非零基本电压矢量的作用时间。

图2 SVPWM空间电压矢量图
为尽量减少谐波,一般采用7段式SVPWM调制方式[4],即在一个开关周期的剩余时间内采用零电压矢量,零电压矢量作用时间为
t0=Ts-t1-t2
(4)

为降低铁耗,提高系统效率,以定子电流最小作为系统效率优化目标[6]。异步电机的电磁转矩Te为
(5)
式中,pn为电机极对数,Lr为转子电感。
电磁转矩Te一定,使定子电流最小,由拉格朗日乘子法可得
(6)

(7)
式中,Ls为定子电感,Rs为定子电阻,Rr为转子电阻。
2 低速抖动抑制
电动汽车在低速行驶过程中,电机的输出转矩容易出现大幅度的波动,使得电机转速产生波动,动力系统出现扭振,进而使电动汽车出现抖动现象,汽车噪音增加,严重影响了驾驶人在驾驶电动汽车时的舒适性。由于异步电机的结构特点、逆变器死区效应以及调制方式等因素产生的电流的谐波是产生转矩波动的直接原因,稳态情况下转矩波动的主要成分为电机频率的6k倍[7]。
假设电机低速抖动对应的转速范围为SpeedL~SpeedH,则电机定子电流频率f1范围为
(8)
则转矩波动的主要频率为6kf1,k等于1、2、3......由于汽车抖动是转矩波动引起的共振,电机转速波动频率与转矩波动频率一致,因此可通过转速波动信息对电机输出转矩进行补偿,以减小转矩波动,抑制汽车抖动。
设计带通滤波器,下限截止频率取为0.16pnSpeedL/60,上限截止频率取为18pnSpeedH/60。当电机转速在SpeedL~SpeedH范围时,使用带通滤波器对电机转速进行滤波,滤波器输出经比例增益后对输出转矩给定值Te_given进行补偿,低速抖动抑制算法框图见图3。设计的带通滤波器需具有较高的阶数,以尽可能的减小滤波产生的滞后影响。
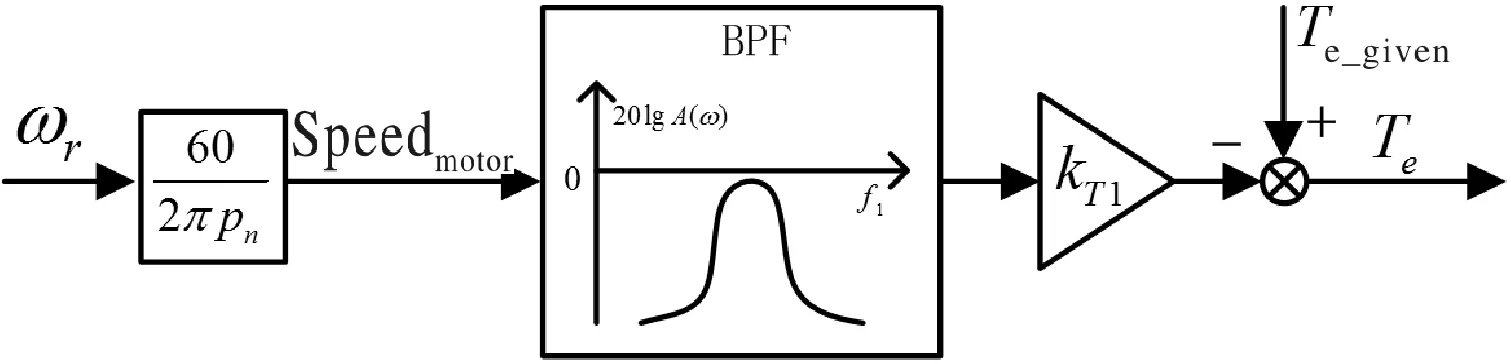
图3 低速抖动抑制算法框图
3 高速限速
在电动汽车行驶过程中,通常驾驶员会通过松开油门踏板或轻踩制动踏板的方式控制汽车的最高转速,然而当电动汽车在长下坡路段接近最高转速行驶时,在重力作用和惯性作用下,电动汽车很容易超过最高车速,甚至存在车辆失控的危险情况。因此很多电动汽车用异步电机的电驱都具有转速控制功能,转速控制不仅可以用于电动汽车的定速巡航,而且在怠速或驱动模式下,当电机转速超过该模式的最高转速时,可以通过转速控制对电机进行限速,实现最高车速的控制。
通常的转速控制是在转矩控制之外增加一个转速环,即转速环的输出为电机输出转矩参考值Te。转速环采用PI控制器,以电动汽车正向行驶为例,当转速超过限速值时,PI调节转矩参考值Te减小,当Te<0时,输出转矩由驱动转矩变为制动转矩,此时电动汽车的动能将通过电机以电能的形式回馈到蓄电池,从而节约了电能,提高了电动汽车的续航里程。
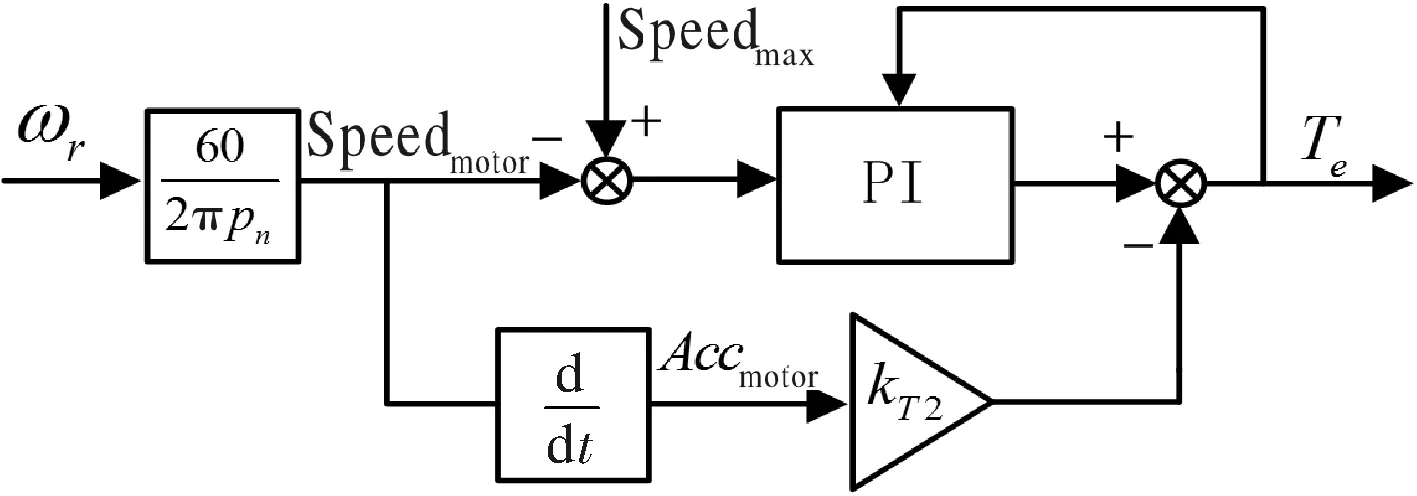
图4 高速限速算法框图
在实际应用中,当PI调节过慢时,由于电动汽车是一个惯性系统,车速将大幅超过最高限速值,且限速将出现振荡过程,当PI调节过快时,输出转矩将变为很大的制动转矩,限速存在顿挫感,电动汽车驾驶舒适性大大降低。针对该问题,设计的高速限速算法框图如图4所示,在电机转速环PI控制器基础上增加转矩补偿环节,当电机转速接近限速值时,将电机加速度经比例增益后对转矩参考值进行补偿,即在限速前根据加速度逐步减小电机输出转矩。
4 转速估算
电动汽车行驶过程中,若转速传感器发生故障,此时将无法对电机转子磁场进行准确定向,电机输出转矩瞬间丢失,电动汽车将出现失控现象。为提高电动汽车运行的安全可靠性,保证转速传感器故障时电动汽车仍然受驾驶员操控,在控制策略中加入转速估算算法。
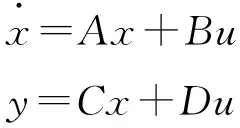
(9)
其中,
(10)
(11)
C=[10]
(12)
D=[0]
(13)
(14)
转速估算依托于准确的磁链观测,设计转速自适应型全阶磁链观测器如下:
(15)
(16)
(17)
(18)

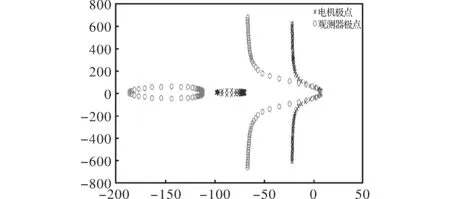
图5 全阶磁链观测器极点
全阶磁链观测器中的电机转速可通过适当的自适应率进行调节,并逼近电机的实际值,即实现转速估算。采用的转速自适应率通过PI结构改善动态性能:
(19)
(20)

图6 转速估算算法框图
电动汽车正常行驶时,同时运行有速度传感器矢量控制算法和转速估算算法,当转速传感器出现故障时,使用转速估算值ωr_est代替转速传感器采集值ωr,算法切入无速度传感器矢量控制,作为转速传感器故障的应急措施,保证车辆能够继续可操控行驶,确保人车安全。
5 试 验
试验包括台架试验和实车试验。台架试验在电机对拖试验平台(如图7所示)进行。三相异步电机额定功率25 kW,峰值功率45 kW,峰值转矩170 Nm,最大输入电流260 A。电机控制器额定输入电压312 V,最低输入电压265 V,开关频率5 kHz。
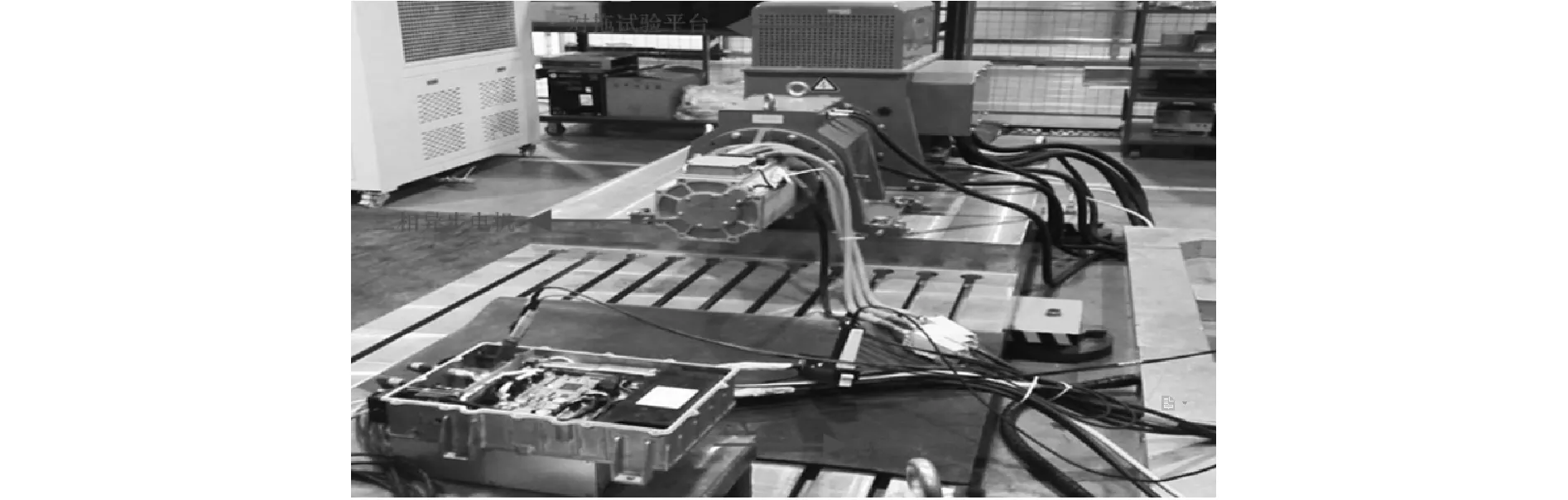
图7 电动汽车用三相异步电机对拖试验平台
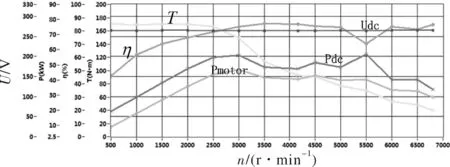
图8 最低工作电压下的峰值特性试验结果
台架试验主要验证电机控制策略的稳定性,尤其是极限工况的弱磁控制稳定性,最低工作电压下的峰值特性如图8所示,其中Udc为电机控制器输入电压,T为电机输出转矩,pdc为电机控制器输入功率,Pmotor为电机输出功率,η为系统效率。在最低工作电压下,电机控制器具备最大转矩和最大功率的输出能力,且在低输入电压和高转速工况下,系统运行稳定。
电机控制器输入额定电压312 V,工作在电动状态下,在转速500 r/min、1000 r/min……6500 r/min、6800 r/min等高低速共12个转度点下进行测试,每个速度点分别选取5-10个转矩点,通过测量输入电功率和输出机械功率进行效率计算。电动峰值Map图如图9所示,在峰值电动特性下,电机及其控制器系统的最高效率为92%以上,高效工作区占比78%,相比未增加最小定子电流策略时的56%,高效工作区提高39.3%。
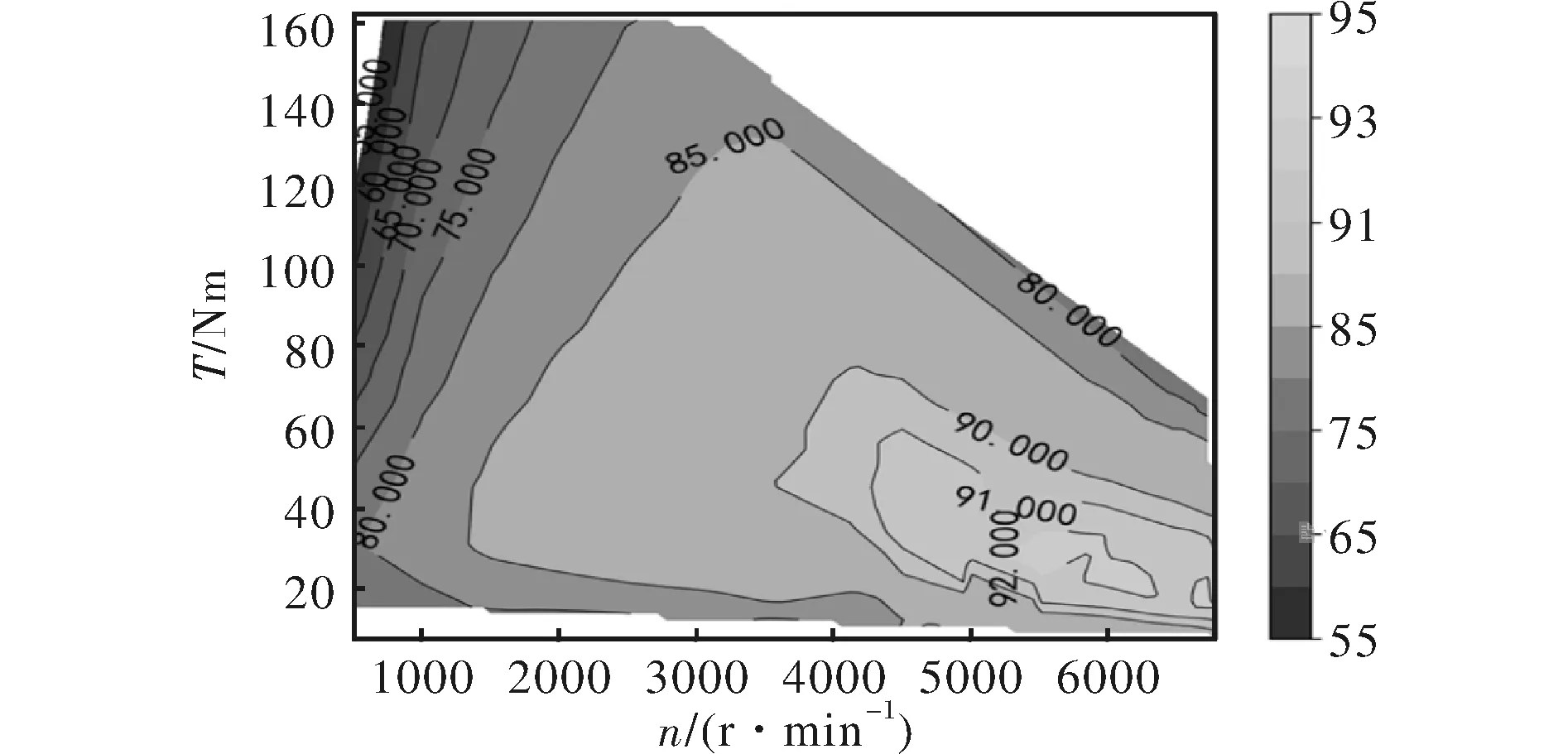
图9 电动峰值Map图
实车试验主要验证控制策略的驾驶舒适性。试验在某型电动物流车上进行,试验路况为山路,试验车程超过1万公里。低速抖动抑制策略解决了电池电量较低、车速较低(对应电机转速200~500 r/min)时的整车抖动问题。高速限速策略,提高了高速限速时的舒适性,高速限速过程整车顿挫现象消失。转速传感器故障采用人为切断通信线缆的方式模拟,切除转速传感器瞬间,电动汽车无明显异常,驾驶人可继续操作电动汽车进行行驶。
电动汽车行驶过程中,若转速传感器发生故障,此时将无法对电机转子磁场进行准确定向,电机输出转矩瞬间丢失,电动汽车将出现失控现象。为提高电动汽车运行的安全可靠性,保证转速传感器故障时电动汽车仍然受驾驶员操控,在控制策略中加入转速估算算法。
6 结 论
本文介绍了一种电动汽车用三相异步电机控制策略。基于等效电压闭环和最小定子电流的弱磁控制算法可实现弱磁扩速,保证电机在最低输入电压下具备最大转矩和最大功率的输出能力,同时使电机高效率工作区提高39.3%。采用转矩补偿来抑制低抖动的低速抖动抑制算法,解决了电池电量较低、车速较低时的整车抖动问题。高速限速控制算法,消除了限速过程整车顿挫现象,提高了高速限速过程的舒适性。将基于全阶磁链观测器的转速估算方法应用到电动汽车异步电机控制中,当电机转速采集出现意外故障,可保证车辆能够继续可操控行驶,确保人车安全。台架试验和1万公里的山路实车考核试验验证了该控制策略的有效性和稳定性。