一种网球自动发球装置的设计
2020-04-10胡晋斋章德平勾艺陈越
胡晋斋,章德平,勾艺,陈越
一种网球自动发球装置的设计
胡晋斋,章德平*,勾艺,陈越
(武汉轻工大学 机械工程学院,湖北 武汉 430023)
网球比赛通常在两名单打球员或两对组合之间开展,因此某些情况下缺少陪练人员将直接导致网球球员的训练无法进行。为了实现网球练习者在无人陪练状态下的自主训练,设计了一款网球自动发球装置。该装置采用单片机控制,具有收球、送球、储球、发球、行走五个功能,并且实现了发球频率、角度和球速的自动调节。实验结果表明:与同类产品相比,该自动发球装置更为符合人机工程学的基本原理,收球和发球效果更好,对于帮助网球练习者提高训练水平具有重要意义。
网球自动发球装置;四轮发球机构;自动行走装置
网球运动作为世界上第二大球类运动,深受广大青少年的喜爱,在我国的普及程度也越来越高。在练习时,无论是初学者,还是专业网球运动员,都需要一位陪练人员。然而陪练人员在陪同练习者进行训练的过程中,由于受到周围环境、精神状态和身体条件等因素的影响,很难做到发挥的水准始终如一,其对发球角度、发球球速和发球距离等技术指标的把握无法保持在稳定状态,这就使得训练效果不理想。此外,训练中需要不断重复的捡球环节也大量消耗了练习者和陪练人员的体力,影响到了网球的练习效果。为解决这一问题,本文设计了一款集捡球和发球功能为一体的网球自动发球装置,可以替代陪练人员的角色来帮助网球练习者进行训练,训练时不仅可以根据各种训练要求进行有针对性的发球,还可以实现全过程机器自动捡球。网球自动发球装置在大幅改善发球质量稳定性的同时,大大降低了练习者因频繁捡球而造成的体力损耗,提高了网球训练活动的质量和效率。
1 网球自动发球装置的方案设计
开展市场调研活动,对如图1所示市场上现有网球发球机的性能技术特点进行总结:
(1)TUTOR发球机。运用对转双轮原理发球。当网球接触到摩擦轮后,在高速旋转的两摩擦轮带动下挤入它们之间的空隙。由于两个反向摩擦轮的摩擦力作用,网球获得一定初速度发射出去。摩擦轮由伺服电机驱动。发球的稳定性高,可控制球速、角度、频率。缺点是发球旋向单一、造价昂贵。

图1 现有网球发球机
(2)LOBSTER发球机。运用空气压缩原理发球。利用空气压缩机产生的气压储存在集气钢瓶内,当球掉入送球管时,释放钢瓶内空气,以空气压力将球弹出。造价相对便宜,适应大众消费水平。缺点是噪音大、功率大、不能使用蓄电池供电。
通过分析可知,现有网球发球机主要存在以下问题:
(1)造价昂贵,市场普及程度不高;
(2)发球旋向单一,无法满足多种要求;
(3)网球机器人未集成捡球功能,多数采用人工捡球,无谓地消耗了练习者的体力。
针对上述不足,本文设计出一种集自动收发球为一体的网球自动发球装置。与市场上现有网球发球机相比,其功能更为强大、发球形式更加多样、市场应用范围更加广泛。该装置不仅可以实现多种要求(各类旋向球、吊高球、吊小球等)的自动发球,还可以做到全程机器捡球,达到了提高网球训练水平、将人从繁重的解放出来的目的。该网球自动发球装置的总体方案设计如图2所示。
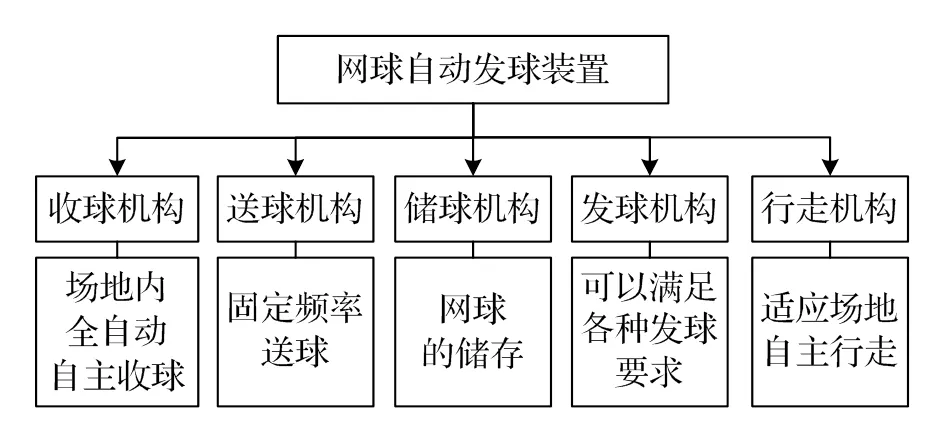
图2 网球自动发球装置的总体设计方案
如图3所示,网球自动发球装置可以分为收球、送球、储球、发球和行走五个功能模块。

1.储球机构2.发球机构3.行走机构4.送球机构5.收球机构
其中,收球机构主要用于实现对场地内四处散落的网球的自动收集,行走机构主要用于实现装置在训练场地之内基于网球自动收集功能的自主行走,储球机构主要用于实现网球自动收集之后的自动储存,发球机构主要用于实现基于各类要求(旋向和球速)的发球活动,送球机构主要用于将储球机构所储存的网球以一定的频率送入发球机构,以帮助完成发球活动。收球机构和行走机构位于装置的底部,储球机构位于装置的顶部。
2 网球自动发球装置的结构设计
2.1 发球机构
发球机构需适应各种发球要求,实现球速和方向的可调。发球结构的主体结构包括摩擦轮机构、行星轮机构和曲柄摇杆机构三个部分。
发球机构采用独创的四摩擦轮发球方式,相比于业内流行的双摩擦轮发球[1]。机构采用四摩擦轮进行发球,可产生更大的发球初速度,由于发旋球时旋转方向通过控制四个摩擦轮的转速来控制,这就使得旋球的样式更为丰富且发球效率更高。上下左右四个摩擦轮各自与一台驱动电机独立相连,四轮中间留有略小于网球直径的空隙。
行星轮机构控制发球机构左右转向使发球水平角度可调,如图4所示。

1.小齿轮2.大齿轮3.内齿轮4、5.联动轴6.行星架7.发球装置
轮1和轮3为太阳轮,轮2为行星轮,6为行星架,轴4和轴5装配在发球装置7上。轮1为主动轮,轮3固定,轮1带动轮2转动使轴5绕行星架6转动实现发球装置7的水平转动。
四杆机构控制四轮发球机构的俯仰角度。如图5所示,电机6带动圆盘4转动,轴3和轴5固定,满足杆长条件且最短杆为原动件该机构为曲柄摇杆机构,轮4转动一圈发球架1转动一个角度实现发球装置的俯仰运动。四轮发球机构安装在发球架1上调节发球架的仰角可控制发球的角度。
1.发球架2.连杆3、5.轴4.圆盘6.电机
可求得:

式中:1为摩擦轮的线速度,m/s;1为摩擦轮角速度,rad/s;为半径,m。
因此网球最大线速度可达41,离心力为:

式中:为离心力,N;为网球的质量,kg。
根据动能定理可得:


式中:为发球时初始抛射角度,rad;为最大高度,m;为抛射距离,m;为球射出的速度,m/s。
当=45°时,取最大值,此时网球可达最远距离,不过应用实践表明:抛射角度过高并不一定能够获得最佳的发球效果,因此将最大俯仰角度设定为35°,而发球距离的补偿则通过控制四摩擦轮的速度来实现。
2.2 储球机构
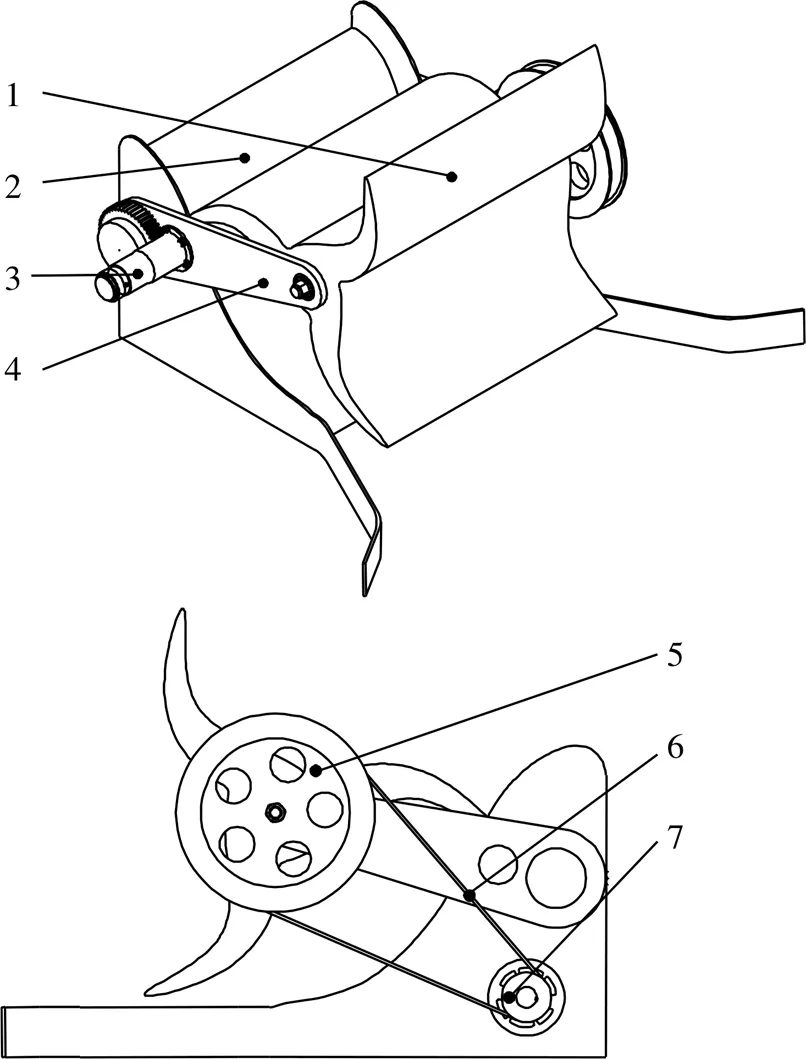
储球机构要实现可容纳网球数目尽可能多、给球频率可调且不易卡球等要求。储球机构主要由储球箱、搅拌机构和给球机构三个部分组成,如图6所示。为最大程度实现空间的充分利用,储球箱分为上下两层,上层设计成底部下凹的箱体结构,底部开设一个比网球直径略大的圆孔,以确保网球能够顺利通过该孔进入给球机构;下层后方开设一个矩形槽用以放置给球机构。

1.搅拌机构 2.储球箱3.给球机构
搅拌机构设计为曲柄摇杆机构,主要用于对储球箱内的网球进行轻度搅动,以确保网球更可靠地进入给球机构,其杆长分别为70 mm、145 mm、180 mm和200 mm。其中连杆设计成形状为倒钩状的杆,其尺寸根据搅拌动作所需的连杆曲线规律进行确定。
给球机构主要由给球盘和六分度槽轮机构两部分组成,其运转由电动机驱动。给球盘上有六个圆周阵列的储球口,网球经由储球箱进入给球盘后,在电机的驱动下六分度槽轮机构带动给球盘转动,当有网球进入的储球口转至与下层入球口对齐的位置时,网球进入软管完成给球动作。电机每转动一圈,给球盘转动60°,通过控制驱动转速可实现给球频率的控制。
2.3 收球机构
目前市面上较为常见的收球捡球装置都是人工操作的网球筒或网球筐。网球筐由弹性条状材料制成,其间距略小于网球直径,用力压下或者滚过球身时将球压进筐中。网球筒由收集筒、手柄、进口阀和弹簧组成,手柄便于操控,进口阀使网球只进不出,而收集筒用于储球[6]。这两种方式效率低、储球数量少、操作方式原始,有很大的局限性。
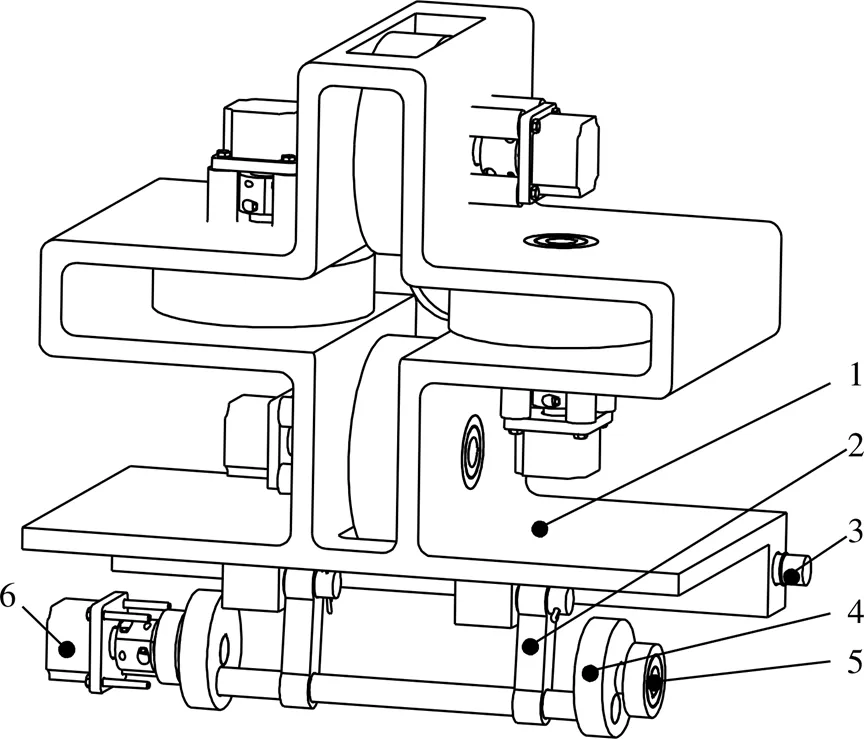
本装置为采用图7所示三扇叶收球装置,利用扇叶旋转进行收球。为了提高收球效率,底座2前端设计成外八字形导轨,使得捕捉网球更加容易;后端部分设计成一个斜面,通过皮带传动传输动力使扇叶1旋转将球从斜面推进送球箱。
1.收球扇叶2.底座3.电机4.支架5.皮带轮6.皮带7.电机
2.4 送球机构
送球机构由送球箱、丝杆和挡板几个部分组成。如图8所示,送球箱后面板底部开设一个高80 mm、长240 mm的矩形槽,送球箱底板适当倾斜以确保网球能够自动滚向矩形槽。在矩形槽外装有挡板,通过挡板动作来控制网球在恰当时刻滚出,避免出现网球在送球箱升降过程中提前从矩形槽滚出的情况。

图8 送球箱的结构示意图
送球箱底部安装有重量感应装置[8],当箱内网球重量达到2 kg时,控制系统会启动电动机驱动丝杆旋转,从而将送球箱升起送至预定位置,使送球箱后面板底部的矩形槽与储球箱入球槽对齐,此时若挡板发生配合动作,网球将全部滚入储球箱,完成送球运动。
2.5 行走机构
行走机构采用后轮驱动,前轮用于控制转向,与汽车转向装置类似,通过控制转盘转过的角度来控制网球自动发球装置的转向,转向机构为自由度等于1的六杆机构。网球自动发球装置所需转向角度为±35°~±45°。参照汽车内轮和外轮的最大转向角度,设定网球自动发球装置转向角为±40°。该机构可以视为一个曲柄摇杆机构与一个双曲柄机构的组合机构,因此机构的运动分析可以从曲柄摇杆机构着手。如图9和图10所示。

图9 转向机构的结构示意图
设该机构中∠=,则与相连机架(以轴负方向为正)的夹角为45°-至135°-。查阅文献[8]可得:曲柄摇杆机构中已知曲柄转动角度,尺寸有无穷多组解,根据实际情况有>0(以轴负方向为正)便于曲柄的安装,满足上述条件的尺寸均合适。

图10 转向机构的结构简图
根据该机构的具体尺寸进行建模并导入ADAMS中进行机构运动仿真[9],可得如图11所示曲线。根据仿真结果可知:ω的大小与时间成周期性变化,机构的行程速比系数≈1。
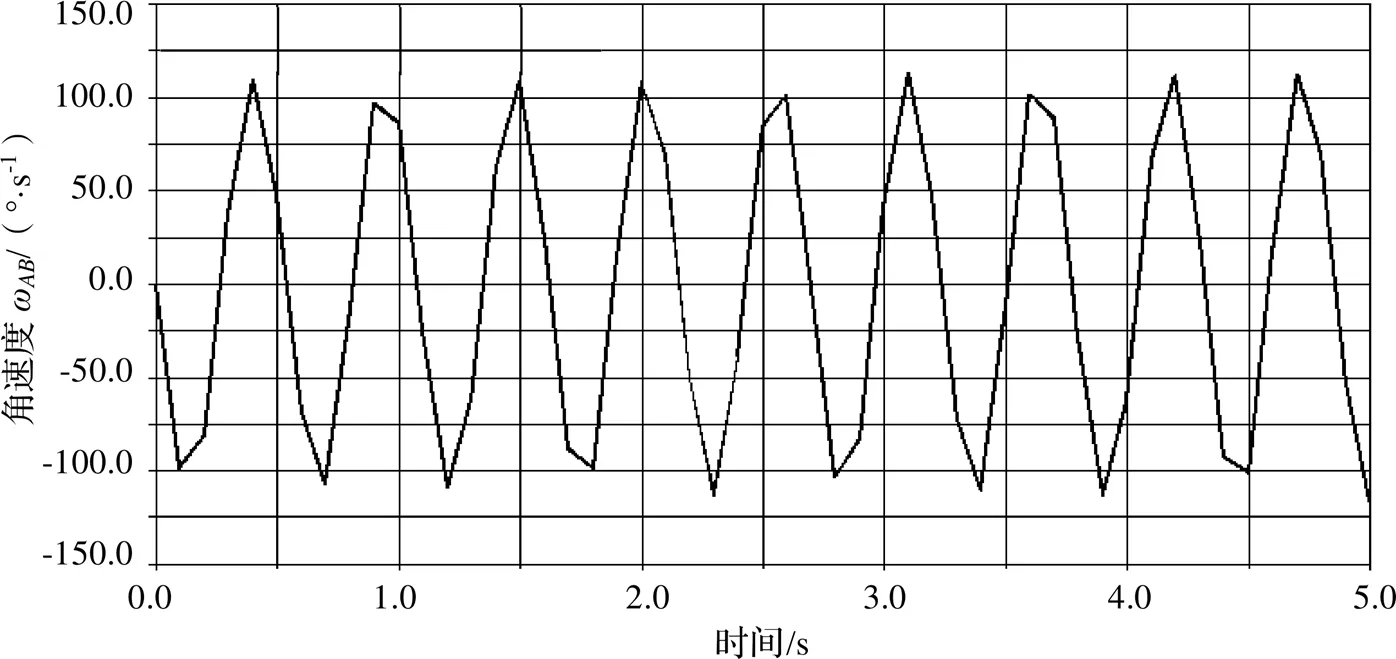
图11 AB杆的角速度仿真曲线
3 结束语
网球自动发球装置旨在帮助练习者训练,提高练习者的网球运动水平,从而促使网球运动更加普及。实践应用表明:本文所设计的网球自动发球装置非常适合进行多样训练,用于专业网球训练效果良好,可以专门针对网球运动员的弱项进行训练,且发球质量具有良好的一致性,尤其适合作为初学者和业余爱好者的陪练设备;网球自动发球装置具有发球频率、发球角度和球速可调的特点,使得网球训练的最大问题即网球落点控制得以解决;网球自动发球装置所采用的机械化收球方式相比人工收球而言,大大减轻了练习者的劳动强度,有利于提高训练效果。
[1]韩良,王德彬,龚焕. 智能网球车的研制[J]. 机电技术,2011,34(1):49-54.
[2]何四平,于勇. 网球自动发射器的研制[J]. 机械设计与制造,2007,23(3):105-106.
[3]黄剑. 网球练习辅助器材的创新与研发[J]. 湖北体育科技,2009,28(4):428-432.
[4]肖华,黄河,谢模焱. 全方位网球移动机器人的研究与设计[J]. 机电工程,2015,32(4):509-515.
[5]吕强国,池静莲,唐凤成,等. 一种网球发射机[P]. 中国:CN204684584,2015.10.07.
[6]史亮,林云飞. 网球发球机[P]. 中国:CN203235213U,2013.10.16.
[7]裴若忠. 智能网球发球机[D]. 长春:长春理工大学,2006.
[8]孙恒,陈作模,葛文杰. 机械原理教程第八版[M]. 北京:高等教育出版社,2013.
[9]宋少云,尹芳. ADAMS在机械设计中的应用[M]. 北京:国防工业出版社,2015.
The Design of an Automatic Serve Device for Tennis
HU Jinzhai,ZHANG Deping,GOU Yi,CHEN Yue
( Department of Mechanical Engineering, Wuhan Polytechnic University, Wuhan 430048, China)
Tennis match is usually undertaken between two players or two pairs, so the lack of partner will directly result in a tennis player's normal training cannot be implemented in some cases. In order to achieve autonomous training of the tennis players under the condition of unaccompanied, an automatic serve device for tennis is designed in this paper. The device that has serving and collecting function is controlled by monolithic processor, and the service frequency, angle and velocity can be automatically adjusted. The experimental results show that the automatic serve device for tennis accords with principles of ergonomics, and it is of great significance for tennis player to improve its training level.
automatic serve device for tennis;four-wheel service part;automatic walking device
TH122;G845
A
10.3969/j.issn.1006-0316.2020.03.013
1006-0316 (2020) 03-0071-06
2019-09-06
湖北省教育厅科学技术研究计划指导性项目——微型汽车差速器轴承预紧的机理研究(B2019057)
胡晋斋(1999-),男,湖北宜昌人,本科生,主要研究方向为机械创新设计。
章德平(1981-),男,湖北宜都人,博士,讲师,主要研究方向为微型汽车传动系统效率优化及测试,E-mail:bluezone1981@sina.com