基于Python的智能控制轮椅的研究与设计
2020-04-10钟小游毛宇菲党旭聪王廷军赵忠扬朱净尘
钟小游,毛宇菲,党旭聪,王廷军,赵忠扬,朱净尘
基于Python的智能控制轮椅的研究与设计
钟小游1,毛宇菲1,党旭聪2,王廷军1,赵忠扬1,朱净尘1
(1.上海电机学院,上海 201306;2.上海卫星装备研究所,上海 200240)
针对普通电动轮椅功能单一的问题,利用Python控制及多传感器实现了对电动轮椅的智能控制。Python开发板控制驱动电机、传动机构,实现轮椅的行走和座椅的升降。倾角传感器、速度传感器、加速度传感器、超声波传感器实时测量和监控行走速度、加速度、座椅倾斜角度、障碍物情况,从而使系统自动判断和控制轮椅速度和刹车。特别是下坡时,当速度超过设定极限值,就自动进行刹车减速到适宜的速度。多功能轮椅具有太阳能辅助供电、手动剪叉式座椅升降、腿部加热、语音提示、刹车等多功能模块,提高了轮椅的舒适性、安全性和多用性。
智能控制轮椅;Python;手动剪叉式升降座椅;倾角传感器;速度传感器;舒适性;安全性
中国健康养老产业发展报告(2016)指出,截至2015年底,我国60岁及以上老年人口占全国总人口的16.1%,预测2050年该比例将达到28%,2050年中国老年人口将达到4.8亿。中国老年人口将向“城镇多、女性多、失能多、学历高、消费水平高、空巢多、丁克、康复医疗”等方向发展[1-2]。人口老龄化是当今世界很多国家共同面临的社会问题,老龄化社会的城市交通特征变化主要体现在需求总量增加、出行结构和影响因素多样化、区域差异显著等方面[3]。随着社会老龄化进程的加快以及由于各种疾病、工伤、交通事故等原因造成下肢损伤的人数的增加,为老年人和残疾人提供性能优越的代步工具已成为整个社会重点关注的问题之一[4]。轮椅是服务机器人的一种,它很好地解决了此类特殊人群的出行问题[5],轮椅的发展趋势主要包括便携性、功能性、个性化、电动化和智能化[5-11]。
现有轮椅以手动和电动为主,基于人为操控,结构相对简单,功能较少,不够智能化、人性化,在自主操纵方面也有缺陷。Python语言具有高效、灵活和简洁等特点[7],设计一种基于Python板开发的智能控制轮椅,在现有轮椅基础上,增加更加人性化的智能控制技术和手动剪叉式升降座椅,可以使轮椅具有良好的座椅升降功能和更好的行驶安全性。
1 智能控制轮椅总体设计
基于Python开发板的新型智能轮椅,除了具有普通电动轮椅的功能外,增加了座椅升降模块、智能坡面控速模块、加热模块、太阳能供电模块、障碍检测模块等,其工作原理如图1所示。基于Python开发的各个模块通过与传感器的结合,使得轮椅对周围环境的检测和自身相关参数可以更好地反馈给使用者,用户可以根据这些参数或者自身感觉做出判断并将轮椅调整到最舒服的状态,当用户来不及做出反应时,系统在保证使用者安全舒适的条件下自动检测与智能控制。
智能控制轮椅通过Python开发板,控制驱动电机、传动机构实现轮椅的行走、座椅的升降。采用多种传感器,实时测量和反馈行走速度、加速度、座椅的倾斜角度、周围障碍物情况,并通过Python开发板实现对轮椅的运动智能控制。当速度到达临界值时,自动减速;当加速度超过限制值时,轮椅可能处于下坡超速或者失速状态,则控制系统自动刹车状态。
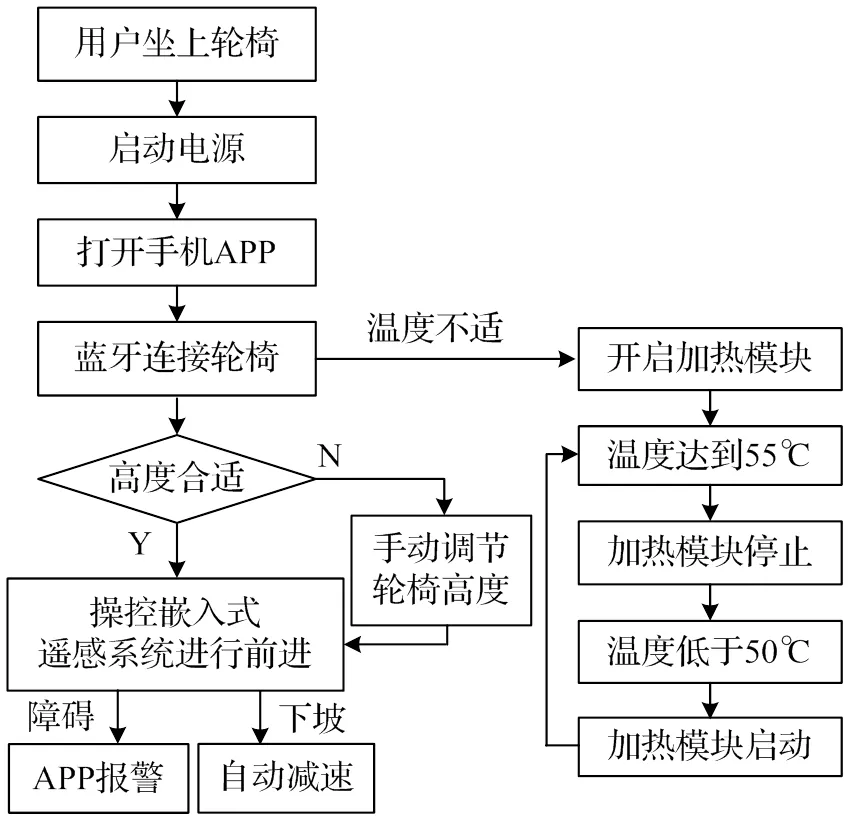
图1 智能控制轮椅工作原理图
使用者可以用手机APP通过蓝牙对轮椅进行无线控制,也可以通过轮椅上配备的操纵台对轮椅进行控制,通过传感器检测,基于Python开发板开发的不同模块将快速判断并自动控制,使轮椅更加智能化和人性化。特别是通过倾角传感器实时测量和监控座椅的倾斜角度、通过速度传感器实时测量和监控轮椅的行驶速度,如下坡时,当出现速度过快,就可以自动进行刹车减速到适宜的速度。
2 智能控制轮椅结构设计
2.1 结构组成
如图2所示,基于Python开发板的新型智能轮椅的主体结构由剪叉机构、动力源、升降平台和底座构成。
2.2 座椅升降结构
为提高轮椅座椅在各种场合使用不同高度要求,采用手动剪叉式升降机构来升降座椅,其工作原理图如图3所示。

1.摇杆控制台 2.坡度传感器、雷达传感器 3.加热模块 4.太阳能电板 5.剪切式液压升降装置 6.距离传感器、速度传感器
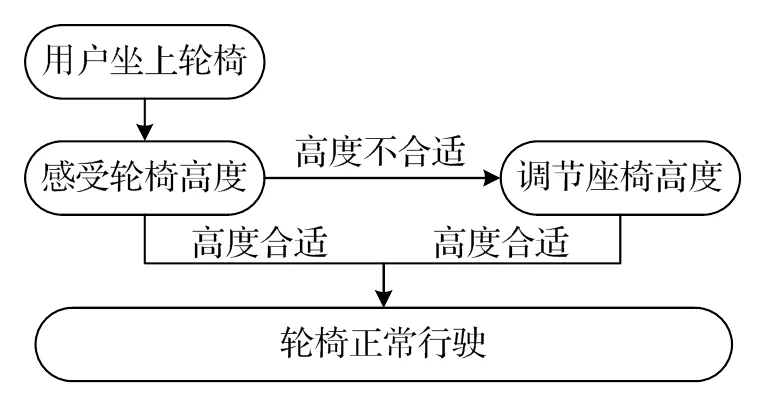
图3 轮椅座椅高度调节原理图
轮椅升降的动力源主要由手动泵和单作用液压缸组成,通过手摇手动泵,油压油经过换向阀、液压锁至液压缸,从而使柱塞伸出推动菱架实现上升功能,当扳动换向阀至下降位,摇动手动泵,通过控制油路打开液压锁,压力油回到油箱,座椅下降。
2.3 手动液压剪叉式升降机构
手动液压剪叉式升降机构如图4所示,通过液压的方式驱动,液压缸的伸缩带动剪叉臂的升降,进而带动升降平台的升降,实现座椅的升降。剪叉式液压升降平台结构简单、易于升降,而且其举重力度大,足以满足设计需求。该设计不仅可以使用户获得更舒适的体验,而且还可以适应取高处物体等的需要。
当升降座椅处于某一位置状态时,可以通过三角形结构关系简单地设计各部分的结构尺寸,如图5所示。
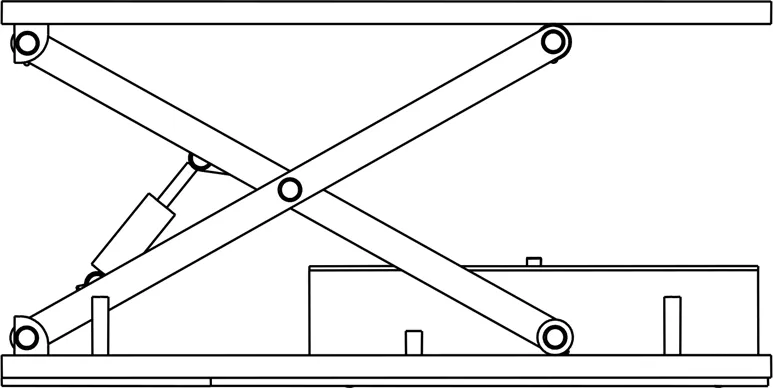
图4 液压剪叉式升降机构的结构简图
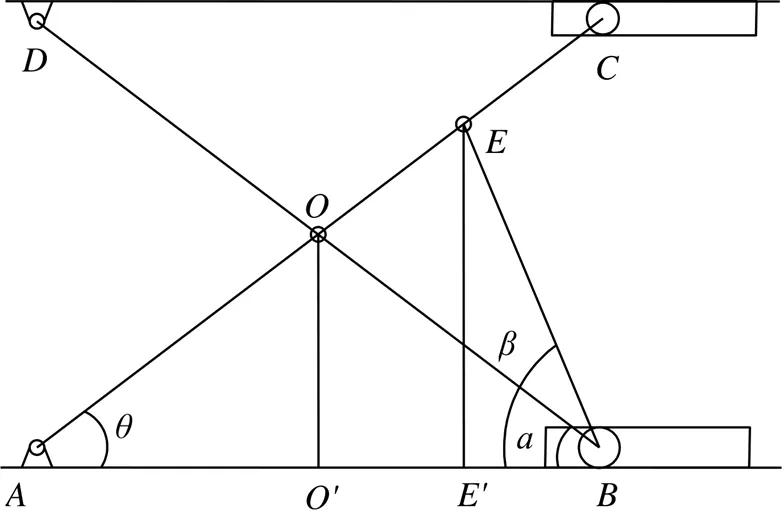
图5 液压剪叉式升降机构的结构简图
根据机构的连接关系,可见:

液压缸和水平面夹角为:

因此,液压缸的伸缩长度为:

2.4 腿部加热
两个腿部加热模块分别安装在左右两个挂脚上面,其由太阳能板供电。加热装置开始加热后,当温度传感器测得温度到达50℃时,传递信号至智能Python板接收和处理,实现智能恒温与温度保护。
3 控制系统设计
Arduino是一款便捷灵活、方便上手的开源电子平台,具有跨平台、简单清晰、开放性、发展迅速的优点。本产品采用基于Python语言开发的Arduino电路板作为控制系统:
(1)通过Arduino电路板与各传感器进行实时通讯,获取传感器收集到的信息,实现多传感器感知;
(2)通过Python编程,检测到坡度时向电机发送信号,实现自主控速下坡;
(3)通过Arduino电路板,控制电机,实现减速,方便快捷
基于Arduino电路板的智能轮椅控制流程如图6所示。
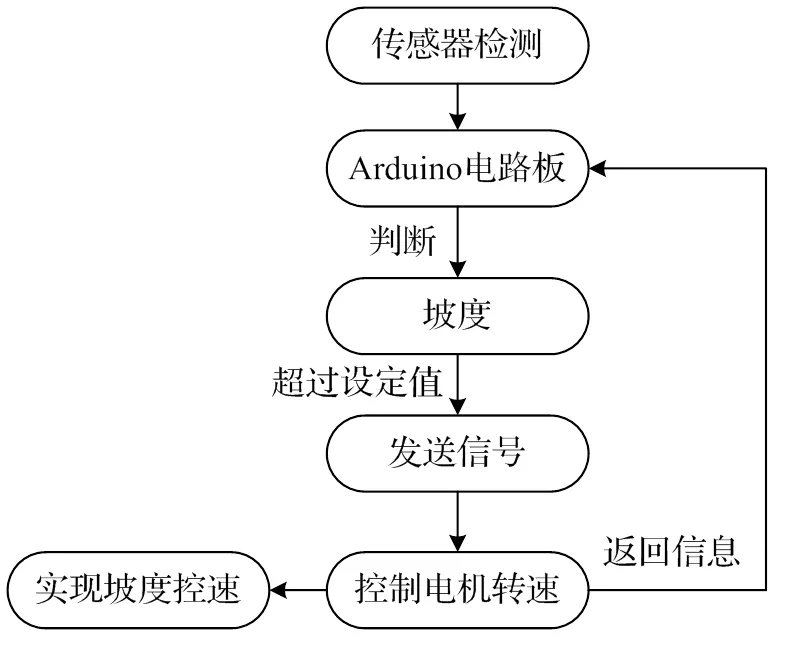
图6 智能轮椅控制原理图
3.1 多传感器融合
本轮椅有多个雷达传感器、倾角传感器、速度传感器,实现对周围障碍物、座椅倾斜角度、行驶速度的实时测量和监控,供轮椅运动控制等需要。
采用雷达传感器发射雷达波来判断前方出现的物体大小、距离和移动速度,与轮椅制动系统进行配合,避免轮椅与前方物体相撞。
倾角传感器用于测量行驶时轮椅的俯仰角度,与轮椅制动系统进行配合,当轮椅的俯仰角度超出设定值,提前预警。
速度传感器用来检测轮椅速度,将采集到的信号反馈至Python开发板处进行处理。
3.2 自动检测与智能控制
由电磁刹车、Python开发板、传感器等部分组成,通过自动检测与智能控制,可自动分析路况、轮椅速度,速度到达临界值或者加速度超过限制值时,通过传感器检测并且反馈,基于Python开发板开发的控制模块控制刹车,实现自主对轮椅实现减速,有效制动,提高轮椅的安全性。
4 结束语
基于Python开发的智能控制轮椅,结合当前智能控制技术,打破传统轮椅功能单一、结构简单的特点,将智能控制、座椅手动剪叉式升降、腿部加热、传感器检测、刹车缓冲装置与轮椅结合,使轮椅功能多样化,使用更加人性化,出行更加安全,使残障人士及老人等行动不便的群体生活更加平等和自由。
[1]吴玉韶,党俊武,刘芳,等. 中国老龄产业发展报告(2014)[M]. 北京:社会科学文献出版社,2014.
[2]中健联盟产业研究中心. 中国健康养老产业发展报告(2016)[R]. 中国生态养老发展高峰论坛,2016.
[3]于晓萍,夏海山. 老年友好城市建设中城市交通设施改善的国际经验借鉴[J]. 城市建筑,2018(4):47-50.
[4]鲁涛,原魁,朱海兵. 智能轮椅研究现状及发展趋势[J]. 机器人技术与应用,2008(3):1-5.
[5]陈世超,林光春,黄亚太,等. 一种可折叠电动轮椅的设计[J]. 机械,2019(8):62-70.
[6]上海互邦医疗器械有限公司. 轮椅发展的历程和趋势[J]. 中国残疾人,2012(2):68.
[7]黄建军,李宥谋,刘婧,等. 基于Python语言的自动化测试系统的设计与实现[J]. 现代电子技术,2017(2):39-43.
[8]王宏臣,盛定高,黄银花. 新型多功能电动轮椅的研制[J]. 机械,2008(9):72-74.
[9]任怡,张峻霞,薛强,等. 可站立式电动轮椅机构设计及运动学仿真[J]. 机械设计,2009(3):43-45.
[10]陈建枫,周丹,董祖阳. 多功能助残专用轮椅的设计与有限元分析[J]. 机械研究与应用,2018(6):71-73.
[11]王淑坤,陈辉,黄玉德,等. 一种多功能智能轮椅结构设计与仿真分析[J]. 机械传动,2019(1):40-43.
Research and Design of Intelligent Control Wheelchair Based on Python
ZHONG Xiaoyou1,MAO Yufei1,DANG Xucong2,WANG Tingjun1,ZHAO Zhongyang1,ZHU Jingchen1
( 1.Shanghai Dianji University, Shanghai 201306, China; 2.Shanghai Satellite Equipment Research Institute, Shanghai 200240, China )
Ordinary electric wheelchair has a single function. This uses Python control and multiple sensors to realize intelligent control of electric wheelchair. The Python development board controls the drive motor and transmission mechanism to realize wheelchair walking and chair lifting. Tilt sensor, speed sensor, acceleration sensor, ultrasonic sensor real-time measure and monitor walking speed, acceleration, seat tilt Angle, obstacles, so that the system automatically judge and control wheelchair speed and brake. Especially downhill, when the speed exceeds the set limit, it will automatically brake and slow down to the appropriate speed. The multi-function wheelchair is equipped with solar energy auxiliary power supply, manual fork chair lifting, leg heating, voice hint, brake and other multi-function modules, which improves the comfort, safety and versatility of the wheelchair.
intelligent control wheelchair;Python;manual scissor type lift seat;angle sensor;speed sensor;comfort;security
TH69
A
10.3969/j.issn.1006-0316.2020.03.014
1006-0316 (2020) 03-0077-04
2019-10-08
2019年上海市大学生创新创业训练计划项目
钟小游(1998-),男,江西瑞金人,本科,主要研究方向为机械设计制造。
