以竞赛为导向的机器人技术课程教学改革研究
2020-03-30高文英
高文英
(沈阳职业技术学院,辽宁 沈阳 110045)
机械的自动化是当今不可避免的一大趋势。智能机器人代替人类工作能够解决安全性、效率、可靠性等一系列问题,并能够在小空间内代替人类无法触及的领域去完成工作。振兴东北老工业基地,要在做强装备制造业的同时加快培育机器人等战略性新兴产业的发展,实现由“中国制造”转变为“中国智造”。作为东北老工业基地的辽宁沈阳,正在大力发展智能制造、智能服务和智能生产,加快向智能化转型[1-6]。
一、高职院校机器人技术课程教学存在的问题
机器人技术课程为高职机械设计与制造专业的专业必修课,课程主要讲授机器人概述、分类、结构、技术参数、运动学基础、机械结构、传感器、控制技术、编程技术等[7-10]。本课程在教学过程中存在的主要问题如下。
(一)课程难度大,需要的前续知识储备量大
高职机器人技术课程要求学生掌握机械原理、机械设计、控制工程、电子与电工技术、传感器与测试技术及其它一些机与电的专业知识,而大部分高职学生缺乏扎实的机械和控制的理论基础,或者说机械和控制二者得此失彼,是机器人技术课程遇到的最大障碍,学生难以对本门课进行整体的把控。
(二)课程教学过程与生产实践相脱离
本课程为高职机械设计与制造专业第四学期的专业基础课,共48学时,其中理论基础40学时,实践环节8学时。实践环节多以参观为主,理论教学枯燥,多是一些理论计算、分析,从而使学生从一开始就对本门课产生厌恶感。讲授过程中主要以书本为主,并基本采用理论讲述,效果欠佳。
(三)课程考核形式单一
课程多以笔试考核形式来结束课程学习。主要通过考查理论计算、概念等知识,学生只需通过期末复习即可通过考试,导致学生缺课率提高,而无法考查学生的实际动手及理解能力,与企业实际需求脱钩。
二、课程改革目标
高职机器人技术课程主要基于当今应用型人才培养的需求,使学生在掌握机器人理论基础的同时,通过组织竞赛、任务分解、在课堂上对任务进行学习、实践操作,从而真正地达到对课程的理解、掌握等目的。
三、以竞赛为导向的课程改革建设实例
以辽宁省机器人竞赛为原型,题目为“智能捡球机器人”,要求机器人能够按照给定轨迹行进,能够自主识别路边的圆球,并通过车载拾球装置将球拾起,行进至终点后能够自主将收集的圆球倒入收球箱内。
(一)课程学时设置
为了满足教学效果,达到课程改革要求,实现应用技能型人才培养,提高学生实践能力,特将本门课程设置为总64学时,其中32为理论教学,32为实践训练。
1.理论教学课时安排
理论教学以竞赛为导向开设学习内容,针对机器人制作过程中所需知识,来设计教学体系,以此提高教学效率。开设的教学内容、目标及学时如表1所示。
2.理论教学考核方式
考核方式是一门课程如何结束的重要部分,也是了解学生掌握程度的一项重要措施。根据教学改革目标,将本次课程考核方式确定为任务式分阶段教学得分的方式,以此达到提高学生实践能力、掌握主要知识点的目的。

表1 理论教学课时安排
将班级按照人数分为4组(每组8人),按照每2~3周一个项目进行任务分配,达到每人有项目,每人有分数。并进行PPT幻灯片汇报,共6次汇报,每次10~20分不等,满分100分。以此使整个评分贯穿于整个教学过程,从而消除逃课、半路放弃或者期末突击考试等情形,真正达到人人听课、人人参与、人人实践和人人达标的要求。
3.实践环节考核
实践环节的设计条件:实践环节与理论教学一一对应,在完成理论教学的基础上,展开机器人的制作训练,训练目的和题目与理论教学一致。
实践环节的设计任务:a.设计一款能够按给定轨迹行进的移动平台;b.设计一款能够安装在移动平台上的机械手臂;c.设计控制程序流程图,编写相关程序;d.制作实物,调试程序。
实践环节的设计要求:a.完成小车的建模,打印整套图纸做出实物;b.完成机械手的建模,打印整套图纸,做出实物;c.完成整机装配调试
4.实践环节的评分设置
实践环节的分值设置如表2所示。
(二)课改教学成果
1.创新点
一是根据机器人技术的课程特点,制定了由“32(理论)+32(实践)”的学时分布特色,实现了理实一体化教学安排。
二是通过过程考核,控制了学生出勤率,实现了人人参与、步步得分的课堂环境,打破了常规的试卷模式。
三是确保了学生学习的主观能动性,增加了实践动手能力。

表2 实践环节的分值设置
2.教学成果展示
(1)小车造型
学生自己动手,通过实际的加工,遇到困难自己寻求解决问题所需知识,打破了传统的教学模式。加工完成的小车如图1所示。

图1 机器人小车三维总体设计
小车采用2轮履带式进行避障行进,采用3自由度机械手臂结构,并用自制1自由度机械爪夹持机构以及丝杠倒球机构等共同组成机器人的整体结构。学生在设计过程中,结合了机械原理、机械设计及机械制造等专业知识理论,效果良好。
(2)行走装置
本机器人采用12V传动比为1:100的直流减速电机作为驱动,采用履带式行进方式,来提供动力,从而稳定前进(如图2所示)。

图2 机器人行走装置设计
(3)抓取装置
抓取机构采用机械爪抓球实现捡球。设计采用舵机提供动力,齿轮啮合,从而能更精确的抓取,从美观的角度来讲,也做到了机械爪之美(如图3所示)。

图3 机器人抓取装置设计图
(4)运球装置
运球装置采用以12V直流电机作为驱动丝杠,使丝杠旋转,从而使运球装置翻转,达到运球的目的(如图4所示)。

图4 机器人运球存球装置设计
(三)电控部分设计
1.电机选择
根据模型预先布置好了轨迹以及工作时间要求,要求规定机器人需要行走的直线距离有两段,一段为1 800 mm,另一段为600 mm。机器人需要行走的曲线距离也有两段,一段是半径为600 mm的1/4圆弧,另一段是半径为600 mm的1/2圆弧。经过整合与分析之后,计算出整个赛道机器人需要行进的中心距离大约为5 235 mm,结合预留给机械手抓取圆球的时间总成估算为1分钟,这样留给行走的时间应控制在两分钟以内。
由于履带底盘的驱动轮直径为4.8 mm,即履带轮的周长大约在151mm左右,用路程比上轮子周长做出电机最终输出的转速为17转/分钟。考虑到弯道会损耗速度按比例计算实际电机需要达到的转速应该是22转/分钟,车体部分采用了钢板角铁等金属结构,这样可能导致车体本身偏重,所以电机需要一定的扭矩。在负载的影响下电机是不可能达到额定转数的,为了控制速度,电机的额定转数应控制在26转/分钟至30转/分钟之内。经过查阅相关电机参数最终选择了一款额定转数为27转/分钟、额定电压为12 V、传动比为1:290的直流减速电机作为主驱动电机。
2.舵机选择
由于所捡圆球质量为60 g,外加机械臂的长度,故选用的舵机为MG996的舵机作为机械臂以及机械爪的关节部分,从而能够支持机械爪以及球的重量。考虑到整个机械臂及机械爪的重量选用MG996远远不够支持其总质量,故选LD-1501数字舵机1个,作为机械臂最底部的支撑,从而达到理想的状态。
3.传感器选择
本机器人采用的传感器是用3个红外避障传感器、2个红外检测球的传感器组成。
4.电源选择
因为本机器人整体质量较大,选用电机扭矩较大,故采用12V锂电池作为电机驱动。另外,因为机械臂连接各驱动板,所以采用7.4V锂电池来驱动机械臂以保证它动作稳定。为了更易于识别待检测物体需电压稳定,故采用7.4V电源单独给各传感器供电。
5.产品造价
(1)机械结构产品报价
机械结构产品报价如表3所示。

表3 机械结构产品报价
(2)机械电控产品报价
机械电控产品报价如表4所示。
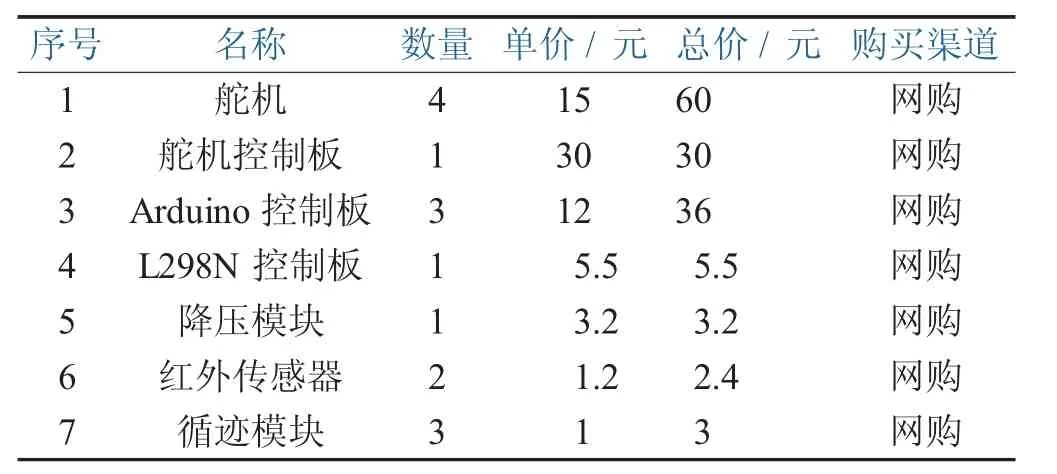
表4 机械电控产品报价
通过此次教学改革,达到了理实一体化的目的,提高了学生的学习热情,提高了出勤率,更加深了前期知识机械原理、机械设计等知识掌握,对学生的专业提高起到了一定的促进作用,改革效果良好。在今后会继续加大教改力度,真正实现应用型人才的培养,提高学生的实践能力。