用于机械手稳定抓取的磁致伸缩触觉传感器设计与研究*
2020-03-10张子超王博文靳少卫
张子超,王博文,靳少卫
(河北工业大学 省部共建电工装备可靠性与智能化国家重点实验室,天津 300130)
0 引 言
智能机械手在抓取物体时既要保证物体稳定无滑动,同时要保证物体不会受到损伤。触觉传感器提供的滑动信号对稳定无损伤抓取物体,同时防止在抓取物体过程中出现滑动至关重要[1]。
国内外研究者对于触觉传感器设计与特性测试做了诸多研究工作。例如瑞士Zurich大学的DAMIAN等[2]采用压阻材料设计了一种触觉传感器;COTTON等[3]利用压电陶瓷材料设计了一种高灵敏度压电式触觉传感器;HASEGAWA等[4]研制的触觉传感器则以压导橡胶作为敏感材料。目前,关于触觉传感器的研究主要集中在压阻式和压电式的触觉传感器研究,而对于压磁式触觉传感器的理论和实验研究较少。相比于压阻式和压电式传感器,压磁式触觉传感器具有精度高、信号处理电路简单、受温度影响小等优点[5]。因此设计新型的压磁式触觉传感器、研究压磁式触觉传感器输出特性规律具有重要理论与实际意义。
本文基于Galfenol材料的逆磁致伸缩特性,参考悬臂梁结构[6],设计一种新型的磁致伸缩触觉传感器;利用该传感器进行滑动检测,对滑动输出电压信号进行一阶离散小波变换,通过得到的DWT细节系数确定一个阈值,对机械手抓取物体进行控制,以实现稳定抓取。
1 触觉传感器的结构和理论分析
1.1 触觉传感器的结构
本研究设计的磁致伸缩触觉传感器结构如图1所示。
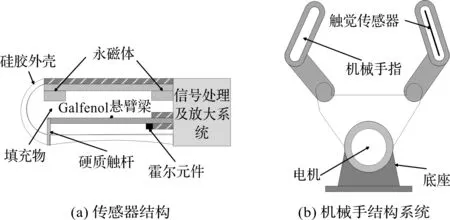
图1 磁致伸缩触觉传感器结构图
图1(a)传感器由硬质触杆、Galfenol悬臂梁、永磁体、霍尔元件、填充物、硅胶外壳和信号处理及放大电路等组成。悬臂梁为Galfenol材料的单层结构,其长度、宽度和高度分别为l、w和h,梁的自由端和固定端上方放置两块极性相反的永磁铁,为Galfenol悬臂梁提供沿长度方向的偏置磁场H;硬质触杆为圆柱状结构,和铁镓片固定在一起,作为力的传递元件引起悬臂梁发生形变;霍尔元件为信号的采集单元,放置在靠近悬臂梁固定端的外表面;填充物采用刚度系数较小的有机弹性材料,使悬臂梁变形后恢复原位;传感器放在机械手指内部,如图1(b)所示。触觉传感器的工作原理为:当机械手抓取物体时,物体会发生滑动,产生切向摩擦力,通过硬质触杆引起悬臂梁发生形变,在逆磁致伸缩效应下,Galfenol材料的磁感应强度B在受到力的作用时会发生变化,从而影响霍尔元件的输出电压的改变[7]。
1.2 触觉传感器理论模型
Galfenol材料在一定偏置磁场下,受到力的作用,材料内部磁畴发生运动,导致内部磁化强度M发生变化。当触觉传感器受到硬质滑杆传递的滑动摩擦力时,磁感应强度发生变化,再由霍尔元件检测Galfenol材料的磁感应强度变化,从而输出电压信号。
根据霍尔元件的磁电转换特性,输出电压UH与霍尔元件检测的磁感应强度BH的关系:
UH=KH×BH
(1)
式中:KH—等效霍尔参数。
由图1的结构图可知,霍尔元件检测Galfenol材料外部的磁感应强度,材料表面磁感应强度的变化与材料内部变化成近似线性关系,可以表示为:
BH=KS×B
(2)
式中:KS—Galfenol材料内外磁感应强度传递系数。
由磁感应强度公式可知,Galfenol材料内部磁感应强度B为可表示为:
B=μ0(H+M)
(3)
式中:H—外加偏置磁场;M—材料的磁化强度。
由铁磁材料磁化强度的磁滞模型分析外加磁场H与材料内部磁化强度的关系,在不考虑材料磁滞时,材料的磁化强度M等于无磁滞磁化强度Man,具体如下:
(4)
(5)
(6)
式中:H—外加偏置磁场;αM—材料磁畴间相互作用产生的磁场;Hσ—在应力的作用下产生的磁场;α—畴壁相互作用系数;Man—无磁滞磁化强度;a—无磁滞磁化强度形状系数;λs—饱和磁致伸缩系数;σ—应力;μ0—真空磁导率;Ms—饱和磁化强度。
由式(5)得:
(7)
用泰勒公式将式(7)展开得式(8);式(8)中当n=2时并忽略高次项得式(9);将式(4)代入式(9)得式(10);由式(10)得式(11);将式(6)代入式(11)得式(12);将式(12)代入式(3)得式(13);应力σ是由于Galfenol悬臂梁在硬质滑杆传递的滑动摩擦力下产生的。
(8)
(9)
(10)
(11)
(12)
(13)
在图1中的触觉传感器中,设梁的长度方向为x轴,梁的垂直纸面的厚度方向为z轴,x轴取在梁的中性面层,梁的固定端x=0。
由欧拉-伯努利梁结构动力学理论可知悬臂梁挠度和受到滑动摩擦力的关系:
(14)
式中:x—梁到固定端的距离;Ff—在梁自由端硬质滑杆给的滑动摩擦力;E—Galfenol材料刚度系数;I—悬臂梁矩形截面的转矩;w—梁的宽度;h—梁的厚度;l—梁的长度。
在偏置磁场H保持不变的情况下,根据材料力学可以得出悬臂梁受到滑动摩擦力Ff发生弯曲变形时,在厚度为z处的x轴向应变与曲率的关系为:
(15)
根据胡克定理,固体材料受力之后,材料中的应力与应变(单位变形量)之间成线性关系,结合材料力学中为了便于计算分析而得到的一个悬臂梁机构模型可得,霍尔元件处检测的梁的平均应力为:
(16)
将式(16)代入式(13)得下式:
(17)
将式(17,2)代入式(1)得下式:
(18)
为了使传感器输出的电压呈增加趋势可以由式(18)改为式(19):
U=Vref-UH=
(19)
式中:Vref—基准参考电压。
由上式可以清楚地看出滑觉传感器尺寸确定后,参数KS、KH、μ0、h、λs、aMs、l、α为定值,输出电压只与偏置磁场和滑动摩擦力有关,因此只要偏置磁场确定时就可以通过输出电压的变化检测滑动变化,为机械手稳定抓取提供判断依据。
2 触觉传感器实验研究
在进行理论计算时需要确定Galfenol材料的一些参数,计算参数如表1所示[8]。

表1 磁致伸缩传感器输出电压模型中参数取值
2.1 理论计算和静态力实验
实验测试系统由静态施力装置、磁场调节装置、传感器和示波器等组成。本研究用施力装置给硬质滑杆一个静态的力,通过示波器测量传感器的输出电压随静态力变化而变化的情况,对每一个数据进行3次测量然后取平均值。
实验测得不同偏置磁场下传感器输出电压与施加力F关系如图2所示。
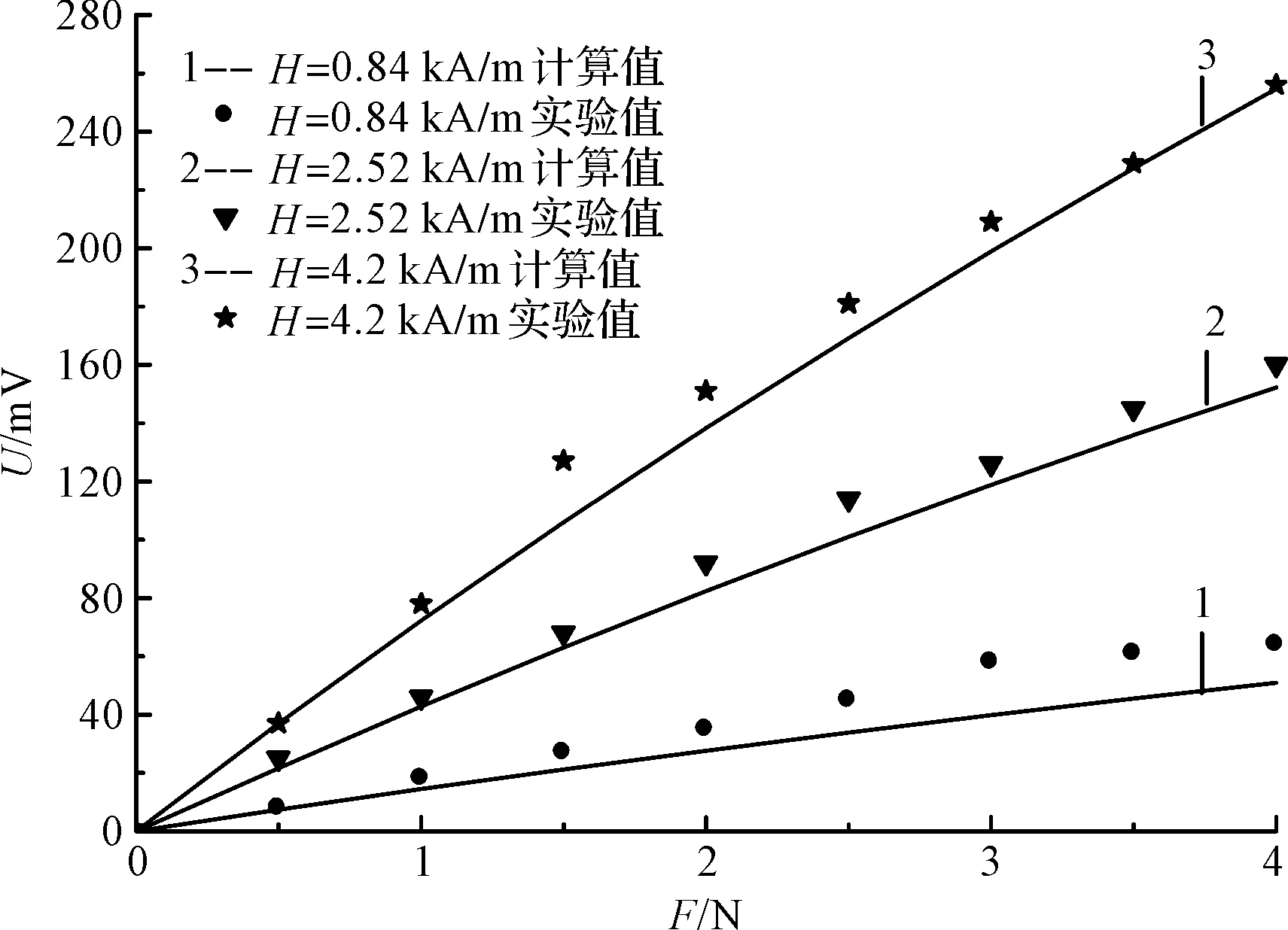
图2 不同偏置磁场时计算值和实验值
图2还示出了应用式(19)的计算结果。
由图2可见,输出电压随施加力的增加而增加,实验结果与计算结果基本一致,验证了式(19)的正确性。
2.2 偏置磁场的确定
在不同偏置磁场下,研究输出电压与静态力的关系,实验数据如图3所示。
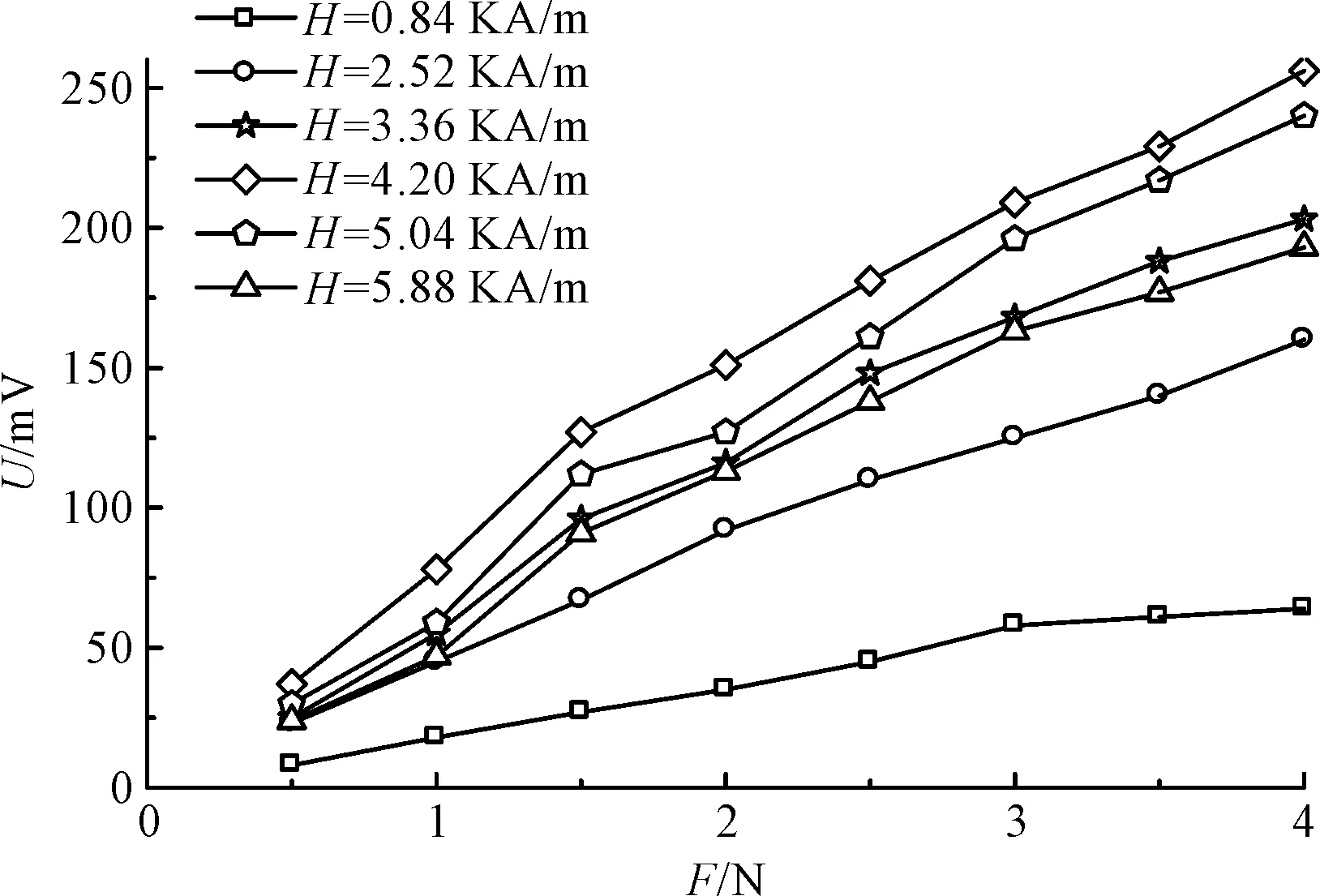
图3 不同偏置磁场时输出电压U与静态力F的关系
在不同静态力下,研究输出电压和偏置磁场的关系,实验数据如图4所示。
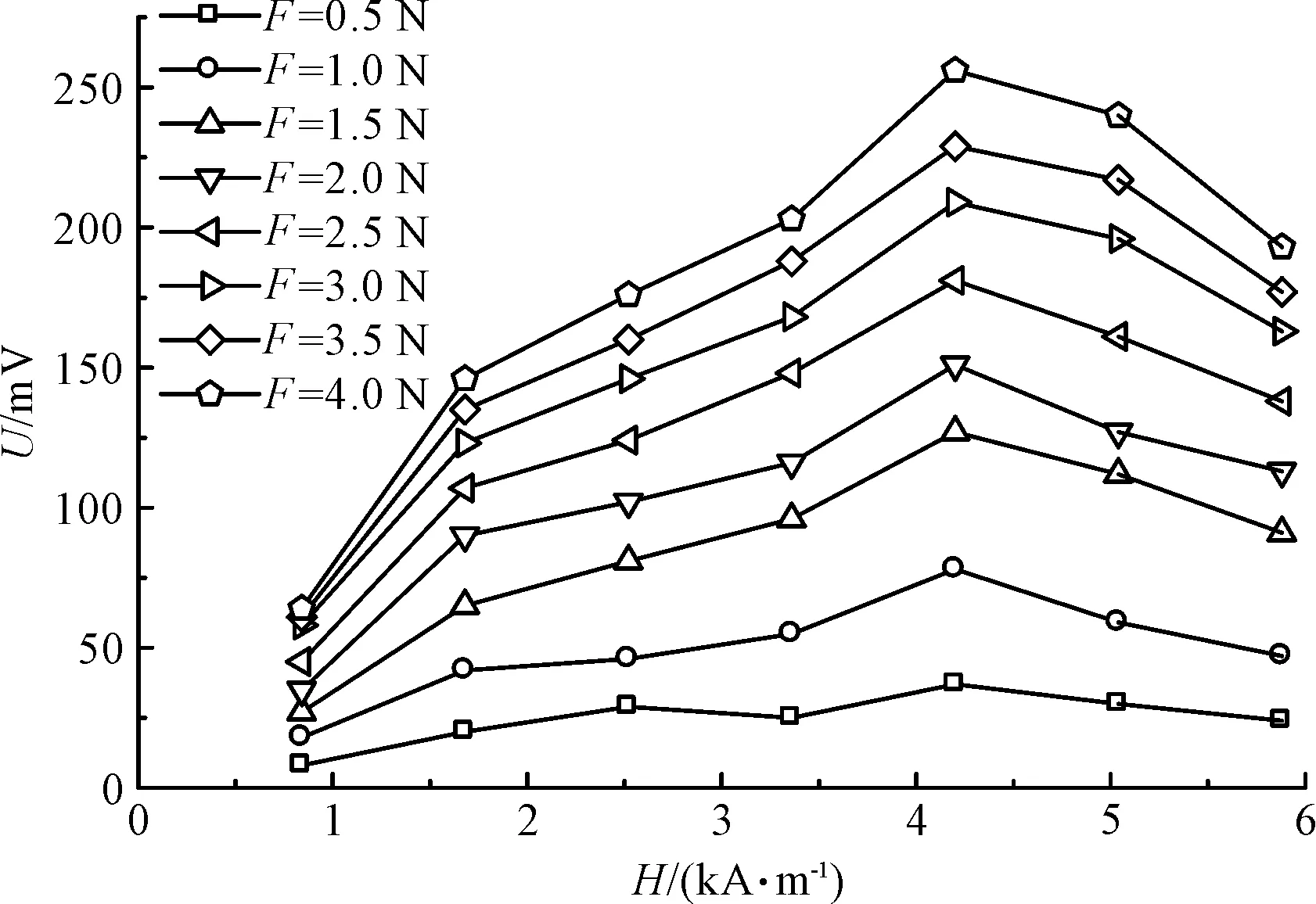
图4 不同力时输出电压U与偏置磁场H的关系
从图(3,4)可以看出:当偏置磁场小于4.2 kA/m时,输出电压随偏置磁场增加而增加;当偏置磁场大于4.2 kA/m时,输出电压随偏置磁场增加而减小;当偏置磁场为4.2 kA/m时,输出电压最大。且当施加的力为4 N时,输出电压达到256 mV,灵敏度达到64 mV/N。结合图(3-4),得出触觉传感器在偏置磁场为4.2 kA/m时,施加的静态力0~4 N在范围内,传感器的线性度好、灵敏度高,所以确定触觉传感器工作时的最佳偏置磁场为4.2 kA/m。
3 实验及结果分析
本研究将触觉传感器安装在二指机械手手指上,并调节偏置磁场为4.2 kA/m,在该偏置磁场下进行实验。手动控制机械手以施加不同抓取力,进行滑动检测实验。
3.1 滑动检测
在不同抓取力下,本研究检测硬质木板的滑动,接触下抓取力分别为:0 N、2 N、5 N。
传感器输出的电压波形由示波器采集,如图5所示。
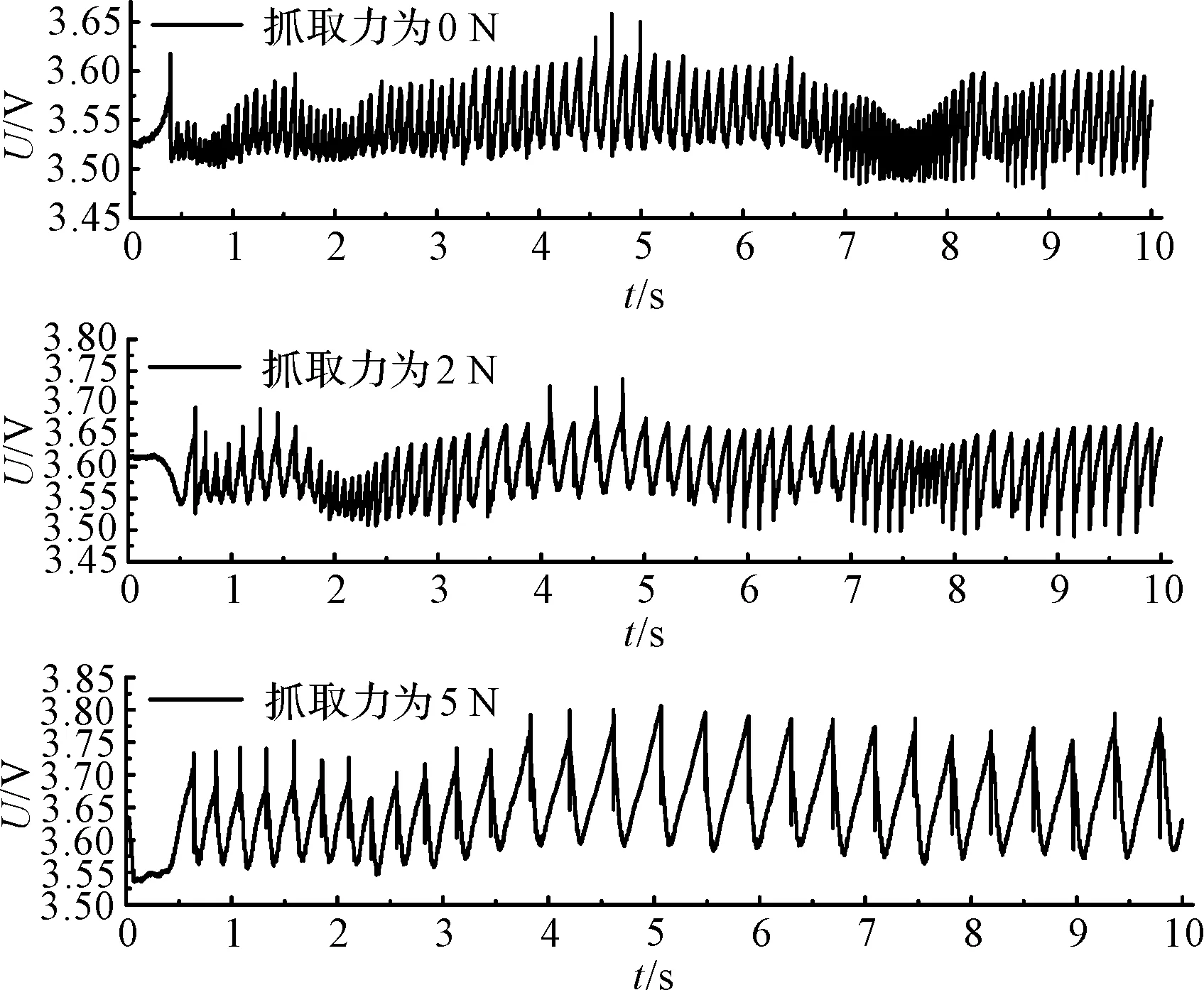
图5 抓取力为0N、2 N、5 N时,检测滑动的输出电压
图5中,由于输出波形仅为信号波形,无法体现具体特征来为机械手提供滑动信号,本研究采用离散小波变换[9]对图5进行分析。
3.2 小波变换分析
小波变换是一种新的变换分析方法,其继承和发展了短时傅里叶变换局部化的思想,同时又克服了窗口大小不随频率变化等缺点,能够提供一个随频率改变的“时间-频率”窗口,能自动适应时频信号分析的要求,进行多尺度细化,是进行信号时频分析和处理的理想工具。
本研究利用Haar小波函数对图5输出电压信号进行一阶离散小波变换,如图6所示。

图6 抓取力为0 N、2 N、5 N时,输出电压的小波变换
图6中,横坐标表示滑动时间,纵坐标表示小波系数。对得到的DWT结果进行分析[10],抓取力为0 N、2 N、5 N对应的细节系数绝对值最大值,分别为0.062、0.085 5、0.11。当抓取力为0 N时机械手并没有抓取物体,其产生的滑动信号为机械手电机等振动产生。所以参考抓取力为0 N时细节系数的最大值,将机械手抓取物体时细节系数的阈值绝对值设置为0.05,认为当DWT细节系数大于阈值时有滑动信号产生,当DWT细节系数小于阈值时没有滑动信号产生,进而对机械手抓取物体进行控制。
3.3 抓取控制
本研究将机械手抓取物体时的阈值设置为0.05,对上述硬质木板进行抓取,得到机械手的抓取状态变化如图7所示。
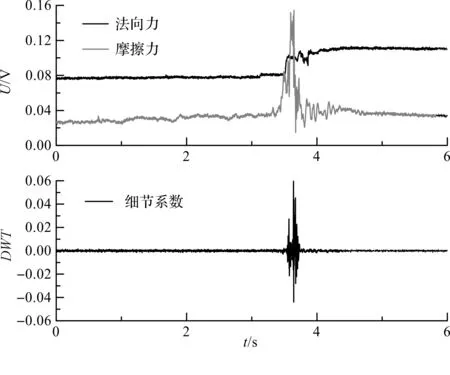
图7 机械手抓取硬质木板时的输出电压及其小波变换
图7中,曲线1代表法向力输出电压,曲线2代表切向力输出电压,曲线3为切向力输出电压小波变换分析。分析图7,当机械手抓紧硬质木板没有发生滑动时,法向力输出电压为78 mV,切向力输出电压25 mV,切向力输出电压小波变换细节系数远小于0.05,所以机械手控制系统认为物体没有滑动,法向力不再改变,而一直保持抓紧状态。当人为拉动硬质木板致其滑动时,切向力会增大,切向力输出电压小波变换细节系数大于0.05,机械手控制系统得到物体滑动的信号,会增大法向力直至再次抓紧物体。
4 结束语
本研究利用Galfenol材料的逆磁致伸缩效应,参考悬臂梁结构设计了一种新型的触觉传感器,建立了传感器输出特性的数学模型。确定了传感器的最优偏置磁场H=4.2 kA/m,在该偏置磁场下,传感器工作0~4 N滑动摩擦力下,其线性度好,灵敏度高,灵敏度为64 mV/N。用离散小波变换对不同抓取力下输出电压波形进行处理和分析,设置了机械手抓取物体时的阈值为0.05。当细节系数的绝对值大于0.05时认为物体与机械手之间出现滑动,反之,认为机械手抓取物体稳定。该研究成果为机械手实现稳定自适应抓取物体提供了稳定的判据。
