基于机器视觉的食品码垛机器人控制系统设计
2020-03-03刘彩霞杨春
刘彩霞,杨春
1. 包头职业技术学院(包头 014030);2. 包头北方创业有限责任公司(包头 014032)
随着计算机技术和自动化控制技术的快速发展,码垛机器人自动控制技术实现飞速发展[1-3]。食品包装码垛机器人便是将规则物品按照一定的形式整齐、自动地码放在固定区域中,以便实现产品的搬运、存储、装卸及运输等物料活动[4-6]。码垛机器人因其具有工作效率高、生产成本低及占用空间小等优点,在食品包装企业中被广泛使用。
在食品生产企业中使用的码垛机器人,只能对规则形状的食品包装箱进行简单的搬运,并不能根据箱体尺寸、形状及不同产品等不同特征的产品做出适当判断完成码垛,其智能化程度较低。中国生产企业正在处于工业化转型、生产线升级换代的关键时期,传统的码垛机器人无法满足竞争日趋激烈的生产企业的实际生产想需求。
机器人视觉技术就是机器人能够通过安装在末端的图像采集传感器,将图像中的信息进行提取,如产品的形状、二维码、条形码等信息进行采集判断,通过控制器中的核心程序控制机器人做出不同的动作[7-9]。
为了提高码垛机器人智能化程度,提高码垛效率,在码垛机器人中引入视觉识别技术,详细介绍视觉图像采集技术。试验结果表明,该控制系统能够100%实现视觉检测,并进行分类识别码放。
1 码垛机器人视觉检测系统
基于机器视觉的食品码垛机器人系统如图1所示。码垛机器人视觉检测系统主要包括四轴码垛机器人、图像采集卡、CCD相机、机械抓手、传送带、运动控制模块等。产品通过传送带传送到机器人末端停放处,机器人末端CCD相机迅速采集图像并将图像传送到图像采集卡中,计算机通过图像滤波、图像分割等一些列图像预处理后,将处理结果传送到控制器中,控制器根据处理结果对机器人发出相应运动指令。码垛机器人通过运动控制模块控制四轴实现同步运动控制,通过机器人外围传感器信号实现末端抓手的码放。
2 视觉检测系统关键技术
2.1 CCD相机标定
CCD相机标定的主要目的是将空间坐标系转化为立体图像坐标系,通过像素变换可以得到像素坐标和世界坐标之间的映射。CCD相机坐标与世界坐标的数学模型为:
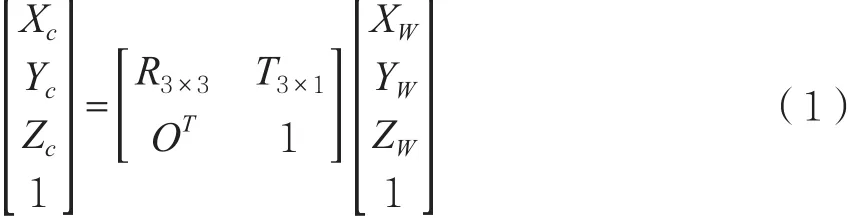
式中:R3×3=(Rx, Ry, Rz)为CCD相机的旋转矩阵,T3×1=(Rx, Ry, Rz)T为CCD相机平移向量,(XW, YW, ZW, 1)为定点在世界坐标系下的向量,(Xc, Yc, Zc, 1)为定点在CCD相机坐标系下的向量CCD相机坐标系坐标(Oc, Xc, Yc,Zc)。
通过映射处理后,可得物理坐标(Xu, Yu)为:

式中:f 为焦距。
2.2 边缘检测
为提高图像分辨效率,通常需要通过边缘检测方式减小图像计算量,去掉不相关信息保留图像中的关键信息。
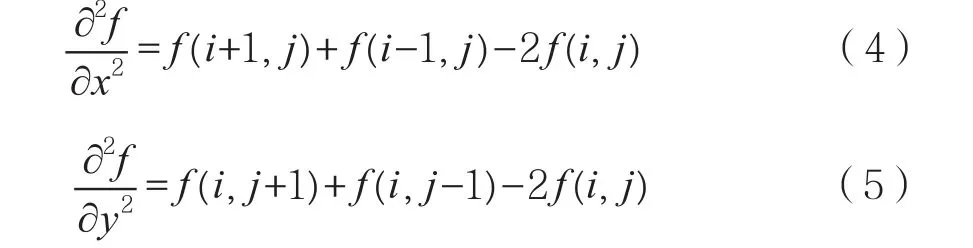
定义函数 f (x, y)的二阶微分为:

那么对于二维离散图像f (i, j),其二阶偏微分可近似表示为:
为解决拉普拉斯算子所存在问题,可先进行高斯低通滤波,然后再使用拉普拉斯算子实现边缘检测,具体可表示为:

式中:f(x, y)为图像;G(x, y)为高斯函数,具体可描述为:

对式(7)进行变换,可得表达式:

对式(8)进行二阶偏导运算,可得:

式(9)就是高斯-拉普拉斯算子,可记作LoG算子。
为提高食品码垛机器人机器视觉系统的高效性,对软件采用模块化设计,整个系统采用程序加载模块、程序初始化模块、中断模块及图像处理算法,机器视觉采集系统的整体流程如图2所示。
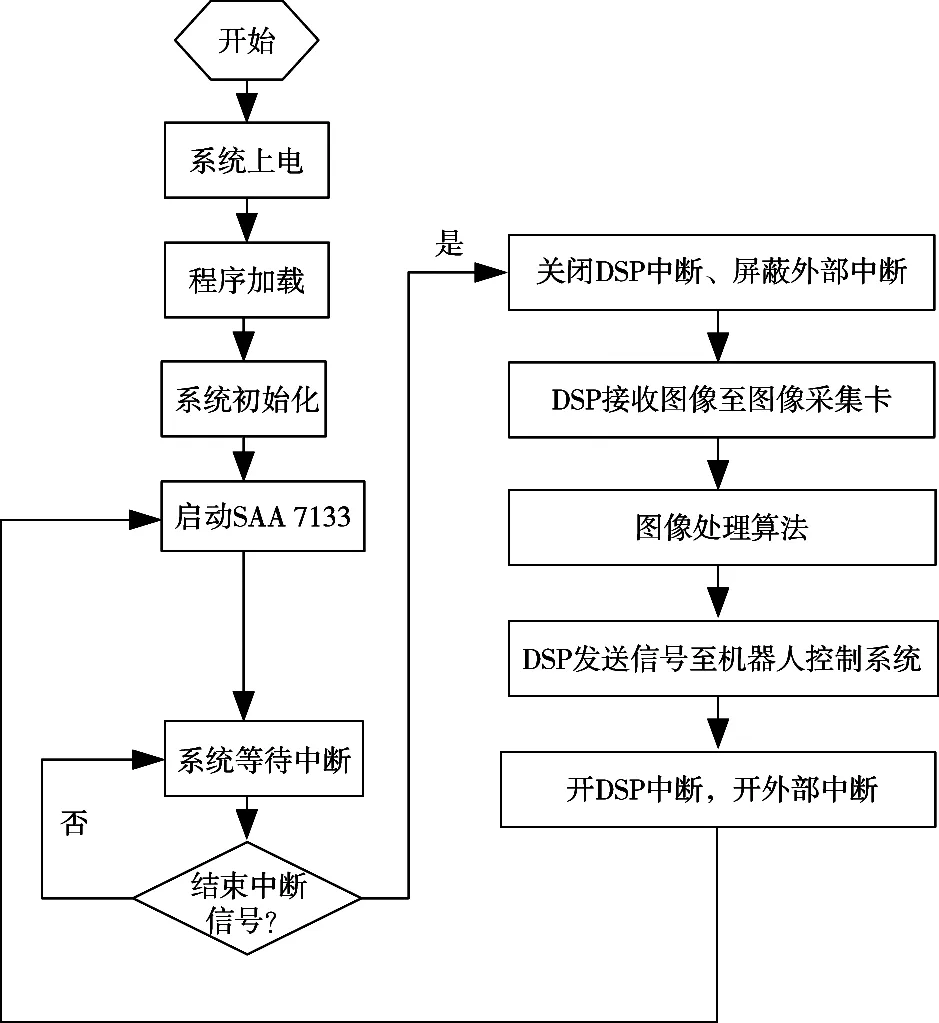
图2 软件流程图
3 试验分析
为了验证设计的机器视觉的食品码垛机器人能够识别不同物品完成相应位置码放,以某型号码垛机器人为研究对象搭建了试验系统,该试验系统主要包括码垛机器人、传送带、CCD相机以及图像采集处理系统等。机器人根据视觉检测系统完成不同物品的码放,码放结果如图3所示。

图3 试验结果
为检测系统效率,对传送带速度通过变频进行速度调节,以验证机器人在不同传送带速度下的码放效率和码放准确性,试验结果如表1所示。试验过程中,传送带速度分别在80,100和150 mm/s速度下进行检验码放准确率,由试验数据可以看出,误抓率为0,漏抓率为小于0.2%。由此结果可以看出,设计的食品码垛机器人能够对不同型号的产品进行分类分拣,其准确率完全能够满足生产要求。

表1 试验结果
4 结语
食品包装物品的分拣和码放作为食品加工生产企业中非常重要的一个环节,传统的码垛机器人不能根据产品外观信息、大小尺寸等进行分类。为解决传统分拣码垛机器人的的局限性,设计一款基于机器视觉的食品码垛机器人控制系统,通过机器人末端CCD摄像机对产品进行图像采集,并介绍相关摄像机标定方法,对采集到的图像进行边缘处理,提升机器人检测准确率和效率。试验数据表明,基于机器视觉的码垛机器人控制系统拥有较高检测效率和准确率,大大提升了企业生产效率。
