微型合成孔径雷达成像信号处理技术
2020-01-17朱岱寅毛新华张劲东
朱岱寅 张 营 俞 翔 毛新华 张劲东 李 勇
①(南京航空航天大学电子信息工程学院雷达成像与微波光子技术教育部重点实验室 南京 211106)
②(南京工程学院计算机工程学院 南京 211167)
1 引言
感兴趣区域(Region of Interest,ROI)的高分辨成像与观测始终是微波遥感技术的关键和研究热点。合成孔径雷达(Synthetic Aperture Radar,SAR)凭借其全天时、全天候和穿透能力强等优势[1,2],能够获取米级至亚米级分辨率的ROI 2维散射图像,广泛应用于超视距探测、定位测量、目标检测与解译等领域。
随着国内外轻小型飞机、无人飞行器的迅猛发展,搭载于这些小型平台上的微型合成孔径雷达(Miniature Synthetic Aperture Radar,MiniSAR)引起了广泛关注。MiniSAR系统通常采用调频连续波体制,其发射信号的峰值功率因而能够显著降低,并结合固态电子器件设计,以便于实现体积与重量的轻小型化。因此,MiniSAR作为一种机动灵活的成像系统[3],同样具备大带宽和高分辨能力,而且易于实现聚束、条带和圆迹等观测模式。在一定意义上,MiniSAR突破了传统大型机载雷达在时间与空间方面的严格限制,应对自然灾害突发、紧急救援、实时战场侦查等方面突显优势。
为此,MiniSAR成像系统成为了一种提高ROI响应速度与侦查灵活性的可靠手段。尽管如此,MiniSAR成像信号处理依然面临若干技术难题:(1)低慢速小型平台及其复杂航迹难以实现较长相干积累时间的聚焦成像;(2)ROI非合作动目标成像常常伴随着多普勒频移与距离模糊,可引起不同程度的散焦效应;(3)轻小型平台约束下的GPS/IMU精度无法满足高分辨需求,需要与运动补偿技术相结合;(4)综合考虑算法复杂性、硬件资源和实时性等因素,与之相关联的并行处理架构的设计任务同样重要。文献[4]设计了一种W波段的无人机载SAR系统,采用了基于锁相技术的线性调频源设计,并对毫米波介质集成波导天线、3维集成、运动补偿方法等关键技术进行了研究,系统可实现7.5 cm的成像分辨率。考虑到MiniSAR复杂航迹,文献[5]通过结合快速分解后向投影(Fast Factorized Back-Projection,FFBP)算法与数据驱动运动补偿技术,并依据准极坐标网格的解析频谱推导了相位误差的空间不变性,从而保证了时域成像时自聚焦技术的嵌入与合并。在此基础上,为了进一步克服MiniSAR运动误差的影响,残留相位误差校正一般通过自聚焦技术实现[6],最显著的方法有相位梯度自聚焦(Phase Gradient Autofocus,PGA)和对比度优化自聚焦(Contrast Optimization Autofocus,COA)。文献[7]解析了散射体在距离多普勒域的固有稀疏特性,并构建了一种多任务学习稀疏贝叶斯框架实现稀疏散射系数与相位误差的估计。该方法优势在于通过适当引入估计的非确定性信息来改善聚焦精度,同时增强了在低信噪比和高欠采样比条件下的适用性。此外,MiniSAR图像的动目标散焦效应同样不可忽视,文献[8]以数据驱动运动补偿为切入点,具体涵盖了损失函数梯度距离对准、时间窗优化、COA自聚焦、时频信息重构和横向定标等一系列算法,有效解决了目标非均匀旋转引起的空变模糊。此类基于优化策略的数据驱动形式对于同时改善成像效率与聚焦深度开辟了新途径,也为观测系统处理效率的提高与实时性设计提供了可能。
综上所述,针对机动平台MiniSAR高分辨成像信号处理技术,需要研究兼具高精度的聚焦算法和高效率的硬件架构设计。据此,本文提出了一套完整的成像信号处理方法及其对应的并行处理硬件架构。所提信号处理方案涵盖了极坐标格式算法(Polar Format Algorithm,PFA)粗聚焦、ROI动目标重聚焦和多子孔径PGA精聚焦算法;同时,该方案可映射至现场可编程门阵列(Field Programmable Gate Array,FPGA)技术,从而实现MiniSAR数据的高速并行处理与实时成像。最后,基于多组X波段MiniSAR实测数据处理结果,验证了所提成像信号处理技术的有效性和可靠性。
2 PFA粗聚焦成像
MiniSAR成像算法是信号处理技术的核心。在高分辨条件下,算法需具备:(1)非常高的成像精度;(2)鉴于微小型无人机飞行的复杂工况,算法需具备自动补偿雷达平台非共面运动的能力;(3)回波数据量非常大,算法需简洁高效并易于硬件实现。传统的近似成像算法(如距离-多普勒算法)显然已不能满足成像精度需求。距离徙动算法(Range Migration Algorithm,RMA)和线频调变标算法(Chirp ScAling,CSA)作为常用频域算法,具有良好的计算效率,但这两种算法都要求雷达平台匀速直线飞行,同时RMA算法不适合嵌入运动补偿,CSA算法仍然存在近似误差,因此也不能很好地满足机动平台高分辨率MiniSAR成像需求。基于时域处理的BP算法能够在载机非理想飞行和非均匀采样条件下使用,但其主要缺点在于计算量太大,需要分布式计算处理,由此导致的成像实现硬件代价较大。相比之下,PFA算法同样在时域进行信号调整和补偿,易于校正平台非理想航迹,非常适合在大机动条件下的成像,而且算法同样简洁高效。此外,依据极坐标格式转换的两维尺度变换特性,基于尺度变换原理的PFA算法对成像效率与聚焦精度进行了新的解释[9],避免了直接插值操作,因而也避免了由于插值核长度有限而带来的相位误差。同时,算法映射至并行硬件处理器件,更可显示其高效性。因此,MiniSAR粗聚焦处理可依据PFA成像算法。
雷达位置由瞬时方位与俯仰角为θ和φ决定,与之对应的参考方位角为固定值θref=π/2,参考俯仰角φref为孔径中心时刻角度。Rc为航迹到ROI中心点的最短距离。MiniSAR系统采用dechirp形式处理,其回波信号形式为

式中,c表示光速,t和τ分别为慢时间和快时间,Tr为脉冲宽度,k为调频斜率,fc为系统载频,r为雷达到目标的瞬时距离。对于条带模式参考距离Rref=Rc,且RΔ=r-Rc。需要说明的是,针对聚束和条带式统一化处理,均可按照聚束模式进行处理。此时,转为聚束模式处理时参考距离并非Rc,而是天线相位中心(Antenna Phase Center,APC)与ROI中心的距离Ra,且多旋翼无人机录取回波数据时RΔ=r-Ra。
PFA首先对每一距离向脉冲进行相位补偿

并依据尺度变换原理对信号距离向数据乘以二次相位函数


式中,fτ为距离向采样频率。此时,所得数据经逆向傅里叶变换(Inverse Fast Fourier Transform,IFFT)后,再乘以二次相位函数:
此外,方位向处理采用keystone变换,具体形式为

至此,所得2维重采样数据通过FFT操作即可成像,从而实现MiniSAR图像的粗聚焦。
一般而言,ROI动目标成像常常伴随着多普勒频移与距离模糊,从而导致了MiniSAR图像中不同程度的散焦效应。为此,MiniSAR非合作动目标成像与重聚焦可借鉴逆合成孔径雷达(Inverse Synthetic Aperture Radar,ISAR)相关信号处理技术[10]。ROI动目标散焦数据可生成等效的ISAR回波,即可将MiniSAR非合作动目标重聚焦问题转化为ISAR相关技术。
3 ROI动目标重聚焦
MiniSAR由于飞行工况复杂,对地面运动目标成像难度显著增加。借鉴以往机载SAR对地面运动目标成像处理的经验,本文提出对ROI动目标数据采用ISAR距离对准算法实现重聚焦成像的技术方案。该方案依据预设全局准则,迭代并优化性能指标,能够有效抑制突跳和漂移误差。其中,全局最小熵算法表现出较好的鲁棒性,但对准精度和收敛速度通常局限于一个距离单元和信号相关性[11,12]。因而,本文拟采用一种改进型全局最小熵距离对准算法,以提高对准精度和动目标的重聚焦质量。该方法依据平均距离像(Average Range Profile,ARP)熵值,同时ARP可由M个距离像列向量pi(r+Δri)的和包络计算获得。

式中,Δri为脉冲包络偏移量。从而ARP熵值为

距离对准需求解式(8)极小值实现,并获得估值

ARP熵值可以通过搜索策略获取pi(r)和pave(r)相关峰值及其对应的Δri值。然而,当E(Δr)终止迭代时,对准精度只能达到一个距离单元。为了进一步改善距离对准精度,算法考虑了时域亚距离单元移位问题。此处,将式(9)的卷积部分表示为R(Ω),并进行以下傅氏变换和离散化操作。
式中,pi(fr)和pave(fr)分别对应于pi(r)和pave(r)的傅氏变换。依据信号序列性质,式(10)可简化为
因而,式(11)可作为目标函数,并结合黄金分割法估计相关峰位置及其对应的亚距离单元偏移量。
除此之外,复杂信号的回波相关性通常呈现一定的下降趋势,同样对包络对齐的精度造成影响。此时,式(8)同样可离散化并除去其中无关的常数因子后可得

令内积Λ=〈pi(r),pave(r)〉,依据施瓦茨不等式,当且仅当两者线性相关时获得最大值。因此,式(7)转化为其线性组合关系使得

显然,pi(r)之间的相关性影响着ARP熵值E′(r)的最小值位置,且距离像之间的相关性与算法收敛速度成正相关。因而,该方法以分块形式提高动目标重聚焦精度和效率。
尽管改进型ISAR距离对准算法的有效性作者已在参考文献[11,12]中进行了检验,然而由于飞行空域的限制,本MiniSAR系统到目前为止尚未对包含动目标的场景进行成像,因此上述方法在MiniSAR系统中的实施效果仍有待进一步检验。本文将在后续试验过程中设法进一步采集包含合作和非合作动目标的数据进行验证。
4 PGA-MD精聚焦
高分辨情况下MiniSAR运动测量单元提供的位置信息精度可能无法满足相干性需求,且因传播介质不均匀而导致的回波延迟误差效应同样不可忽视。微型运动平台更容易受到气流扰动的影响而具有更大的轨迹偏离,严重影响聚焦质量。因此,本文针对MiniSAR图像精聚焦技术,采用多子孔径PGA-MD自聚焦,能够显著改善高分辨情况下的聚焦深度[13]。
假设子孔径脉冲数目和间隔分别为Na和m0,m为方位坐标,此时对应的子孔径数目为P=[(M-Na)/m0]+1,相邻子孔径重叠脉冲数目为Na-m0。相位误差采用Q阶多项式模型为多项式系数,则第p个子孔径相位误差(Subaperture Phase Error,SPE)可描述为

不同距离单元的多普勒频率通过PGA循环移位操作消除,然而常常伴随着未知线性相位的引入。此时,SPE梯度由式(15)组成

此时,第i和j个子孔径对应于相位历史域的线性相位误差计算为

式中,方位相对偏移量δi,j通过利用MD算法对P(P -1)/2个子图像进行互相关获得。此时,两者关系方程组为


方程组式(17)有唯一的最小均方解
最后,SPE梯度的拼接操作可由式(19)实现。

此处需要说明的是,针对高分辨MiniSAR图像精聚焦处理,算法选择相邻子图像实现相位误差估计:(1)MiniSAR相邻子孔径信号相关性最优,对应相关峰值估计精度高;(2)子图像的减少能够显著降低H的维数和计算量,以提高相位补偿效率。
综上所述,本文所提MiniSAR成像信号处理方案可以归结为一幅流程图,涵盖了PFA粗聚焦、ROI动目标重聚焦和PGA-MD精聚焦,如图1所示。
5 实时处理系统设计与实现
微型化、实时成像处理是系统设计和实现的关键。相较于大型机载SAR系统,MiniSAR系统的微型化设计,要在保证系统参数指标的前提下,尽量简化系统的设计结构。调频连续波SAR系统保留了传统脉冲SAR系统高分辨率的优点,又具有调频连续波雷达体积小、功率低、成本低的特点,使其适用于在无人机上进行低空成像。雷达接收机采用dechirp形式,结构相对简单,降低了AD器件的采样频率与设计成本,从而在保证系统分辨率的情况下,能够显著减小处理数据量,有利于后续高分辨率成像算法的实时处理。
MiniSAR成像信号处理技术复杂度较高、数据吞吐量大,如何实时高效地处理数据具有实际工程价值。一般而言,GPU和FPGA作为常用的并行处理技术,均能可靠地应用于SAR相关信号处理[14]。然而,GPU较为适用于非相关性单指令多数据流的运算,面临大量不规则内存访问和同步扩展时,其运算容易导致低效率和高功耗。而FPGA适用于比特流操作,对系统实现细节具有较高级别的控制。依赖于丰富的查找表和寄存器等资源,并行方式FPGA芯片具备高吞吐量,低功耗,强抗干扰能力等优势。因此,FPGA并行架构具备灵活的处理资源配置和优化能力,可以较好适应MiniSAR成像信号处理技术需求。
本文设计了一种基于FPGA架构的成像处理系统(暂未考虑动目标重聚焦技术),并如图2所示,具体涉及了3个核心子模块:数据传输子模块,通过以太网实现FPGA开发板与上位机的数据传输;算法处理子模块,对数据进行PFA成像、自聚焦与几何失真校正处理;DDR3 SDRAM读写子模块,实现2维数据的转置与连续地址的高速读写。
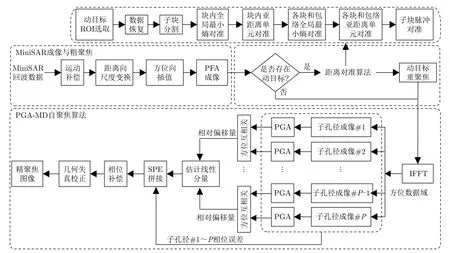
图1 所提MiniSAR成像信号处理流程图Fig.1 Proposed flow diagram of MiniSAR imaging signal processing
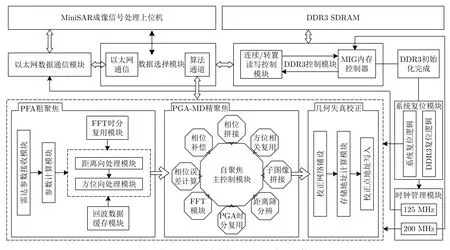
图2 基于FPGA设计架构的MiniSAR成像处理系统Fig.2 MiniSAR imaging processing system based on FPGA design architecture
(1)数据传输模块:系统采用以太网实现主机与板卡之间的通信,并在网络层和传输层的协议控制上选择UDP/IP协议来实现。FPGA实现UDP/IP设计相对简单,资源利用较少。实测数据处理初始化阶段,上位机负责把MiniSAR参数和回波数据通过以太网传输到FPGA模块,数据写入DDR3 SDRAM。同时,也可将最终成像处理结果发送回上位机显示。
(2)成像处理算法模块:PFA粗聚焦模块主要由参数计算模块、距离向PCS模块、FFT模块、方位向插值模块组成;自聚焦模块主要由距离降分辨模块、方位相关复用模块、FFT模块、PGA时分复用模块、相位误差计算模块、相位拼接模块、相位补偿模块和子图像拼接模块组成;几何失真校正模块主要由校正网络铺设模块、存储地址计算模块和校正点地址写入模块组成。
具体实现方式:PFA粗聚焦模块首先将MiniSAR回波数据写入到DDR3内存,同时传输其基本参数至参数计算模块。采用64位高精度浮点计算分别获得距离向、方位向与自聚焦处理所需的具体参数,对回波数据进行距离向PCS处理并以转置形式写入DDR。此外,参考距离补偿同样针对每一个脉冲,且可与距离向重采样一并处理,从而简化操作和节省反复读写DDR3的时间,提高了系统处理速度。最后转置读取每一个距离门数据通过Sinc插值核实现方位向重采样处理。图3为距离与方位实现的具体模块图,距离向处理过程中需要2次FFT(或IFFT)操作,虽然同时例化若干FFT的IP核能简化代码设计,但是极大地占用FPGA片上资源。而本系统中FFT模块和IFFT模块采用时分复用同一个FFT模块的方式,只需要例化一个FFT的IP核,可以保证运算速度的同时大大减少FPGA板内资源消耗。而方位向插值模块主要包含:待插值点判断模块和Sinc卷积模块。插值过程先根据待插点坐标寻找出相邻8个点的坐标位置,将坐标系数与输入的雷达回波数据对应相乘得到插值结果。针对处于样本边界外或不存在相邻8个点的待插值点,本设计中采用标识信号进行判断,使特殊点和正常点处理一体化,从而模块设计更简单、稳定。
自聚焦模块以PFA极坐标格式转换后的数据开始,在DDR3中按方位向连续存储。第1步进行距离向降分辨率成像,并选取部分距离单元(设为2048)进行方位向到距离向的转置,同时设置FFT模块对距离向数据作2048点的FFT成像,以数据转置形式按方位向连续存放,以便于提高读写速率;第2步利用PGA-MD估计全孔径相位误差。本文设计的PGA模块结构如图4所示,并设置PGA模块的聚焦相关参数,启动PGA模块,直到每个子孔径数据全部处理完毕,并将估计的定点格式的相位梯度值传递给相位拼接模块。然后对聚焦后的相邻子孔径图像对进行方位互相关获得相对偏移量,并传递给相位拼接模块完成子孔径相位梯度拼接及积分得到全孔径相位误差。第3步设置分块PGA的相关参数,再次启动PGA模块,直到每个子图像处理完毕。同时利用方位互相关模块估计PGA聚焦前后的偏移量并完成子图像的拼接。

图3 PFA 2维处理模块Fig.3 2-D processing modules of PFA

图4 相位梯度自聚焦模块结构图Fig.4 Structure diagram of phase gradient autofocus module
几何失真校正模块以逐距离向脉冲形式处理,计算第一条距离向校正点对应的PFA图像坐标,然后依据待处理数据在DDR3中的存储方式,将图像坐标转换为DDR3存储地址,再次逐距离向采样点数进行DDR3数据读取操作,完成该条脉冲的几何失真校正并顺序写入DDR3,重复上述操作直至所有脉冲全部处理完毕,即可获得最终成像结果。
(3)DDR3读写转置模块:用以存储MiniSAR回波数据和算法处理结果,内置的读写控制模块可实现数据处理时所需的连续、转置读写操作,单通道内存为4 G,开启双通道后可实现8 G存储,满足实时处理的海量数据需求。本系统利用一片DDR3内存条,矩阵转置采用的是直接式分段存储方法。具体存储过程如图5所示。同时采用一种读写速率平衡的转置方式,其本质是在SDRAM的同一行中存放相同分量的列数据和行数据,在略微增加写操作换行次数的同时大大减少读操作换行次数,从而提高转置效率。

图5 直接式分段存储Fig.5 Directly segmented storage

表1 资源利用率Tab.1 Resource utilization
所提FPGA成像系统已在Xilinx公司的Virtex7-XC7VX6907开发平台上进行了验证。当系统工作频率为200 MHz,处理8192(方位向)×4096(距离向)像素点的32位单精度浮点数据时,系统处理时间为3.58 s,此时FPGA处理时间低于对应的脉冲积累时间,表明其成像效率可满足实时性处理的需求。此外,表1给出了系统的FPGA资源利用情况。系统利用片内DSP48E1资源来提高乘加模块,FFT模块的处理速度。使用最多的资源为LUT资源,占用率达到63%,表明了本设计较高的算法控制能力。其中Block RAM与DSP资源均占用30%左右,使用合理。浮点计算能力尚有冗余,完全可以处理较大数据量的数据或者增加其余算法处理模块,有利于系统后续的扩展使用。Block资源主要用于通过存储换取较高的算法处理效率,可以看出本系统的硬件框架通过较少的Block资源得到了较高的算法处理效率并且本系统还有较高的处理效率提升空间,也可采用多脉冲并行处理架构进一步提高处理速度,满足实时性设计需求。
6 实测数据处理与分析
为了验证本文所提高分辨MiniSAR成像信号处理方案的有效性,依据图2给出的FPGA系统架构,对X波段MiniSAR实测数据进行了成像处理。MiniSAR系统的关键参数如表2所示,该系统采用调频连续波体制,搭载八旋翼无人机进行试验的场景如图6所示。
MiniSAR系统距离分辨率为0.1 m,并以聚束和条带模式完成了多组ROI回波数据采集。ROI#1的粗聚焦与精聚焦成像结果如图7所示,所提方法能够校正大机动微型平台引起的相位误差,并获得良好的聚焦效果。图8给出了ROI#2和ROI#3聚束成像与光学影像对比图,场景地物清晰,细节丰富,且对比度和信噪比较高,聚焦质量良好,反映了MiniSAR系统的高分辨成像能力。此外,图9和图10分别给出了ROI#4和ROI#5的条带模式成像结果,实现了大测绘场景的成像与观测,从而进一步验证了所研制的高分辨率MiniSAR成像信号处理系统的有效性和可靠性。

表2 主要的系统参数Tab.2 Main system parameters

图6 MiniSAR试验系统Fig.6 MiniSAR experimental system
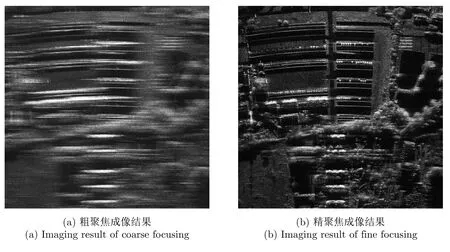
图7 ROI#1成像处理与聚焦对比Fig.7 Imaging processing and focusing comparison for ROI#1
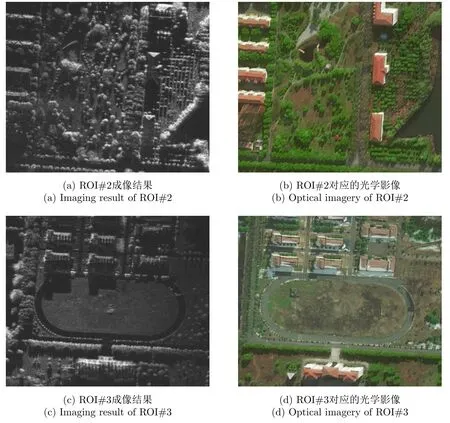
图8 聚束式实测数据ROI#2和ROI#3处理结果Fig.8 Measured data processing results for spotlight ROI#2 and ROI#3
7 结束语
针对机动平台MiniSAR高分辨成像系统,本文提出了一套完整的信号处理方法及其对应的硬件设计架构。
(1)高精度MiniSAR成像信号处理方案涵盖了PFA粗聚焦、动目标重聚焦、PGA-MD精聚焦和几何失真校正算法;
(2)基于FPGA硬件设计的高速并行成像处理系统,契合了遥感监视系统的快速响应需求;

图9 条带式实测数据ROI#4处理结果Fig.9 Measured data processing result for stripmap ROI#4

图10 条带式实测数据ROI#5处理结果Fig.10 Measured data processing result for stripmap ROI#5
(3)多组X波段MiniSAR系统实测ROI处理结果验证了本文方法的有效性和可靠性。