高分辨率星载SAR成像与图像质量提升方法综述
2020-01-17李春升
李春升 于 泽 陈 杰
(北京航空航天大学电子信息工程学院 北京 100191)
1 引言
星载合成孔径雷达(Synthetic Aperture Radar,SAR)作用距离远,覆盖范围广,能够实现对全球海洋和陆地的全天候、全天时监视与监测,获取反映地物后向散射特性的高分辨率图像,是一种重要的空间遥感信息获取工具[1-3]。
美国于1978年6月发射了世界上首颗SAR卫星-“SEASAT-1”卫星[4]。之后四十余年,欧盟、加拿大、日本、德国、中国、以色列等国家都相继发射了各自的SAR卫星。目前在轨的SAR卫星,突破了精密轨道控制、天线2维扫描、高精度成像处理和定标等一系列平台、载荷和地面关键技术,可服务于海洋、减灾、水利及气象等多个行业及业务部门,是实施海洋开发、陆地环境资源监测和防灾减灾的重要技术支撑。随着科学技术的不断进步,星载SAR向着高分辨率宽测绘、多方位信息获取、高时相对地观测、3维地形测绘等方向发展,将能够提供更为广阔、更为丰富、更为细致的目标信息[5]。对于任何星载SAR系统和工作模式,获取高质量的图像始终都是提升SAR应用效能的前提。
星载SAR图像的生产涉及到数据获取、成像处理和图像后处理等多个环节。在地面处理系统中,首先由成像处理算法对原始回波进行精确的2维匹配滤波,生成单视复图像;然后,进行辐射和几何校正等操作,生成更为高级的产品。对单视复图像进行评估,可以获得反映星载SAR系统和成像处理算法性能的成像质量指标;对后续的高级图像产品进行评估,可以进一步得到影响SAR应用效能的图像质量指标。虽然成像质量指标(包括空间分辨率、旁瓣比、等效噪声系数、模糊度、定位精度等)一般是利用专门的定标场或在地物环境完全已知的条件下进行测量,但是其具有普遍性意义,所代表的系统性能在其它环境和条件下也成立。而图像质量指标(动态范围、均值、方差、等效视数、辐射分辨率等)反映的仅仅是一幅SAR图像的质量好坏。
目前,主要有3种方式提升星载SAR的成像质量和图像质量:(1)采用先进的平台和载荷技术,提升卫星轨道和平台姿态的控制及测量精度,改善有效载荷特性,减小信号在发射、传输和接收过程中所引入的系统误差[6];(2)提出新的工作模式,消除传统工作模式所存在的弊端,例如:用TOPSAR模式替代ScanSAR模式,从而弱化雷达图像中所存在的“扇贝效应”[7];(3)开发地面处理技术,通过成像处理和图像处理,对方位模糊、斑点噪声、旁瓣等进行处理,减小各种干扰因素对图像质量的影响。
本文将基于“观测在天,成像在地”的理念,首先阐述星载SAR对地观测系统的成像机理。然后从天地一体化的角度,探讨如何从卫星轨道、平台姿态、有效载荷、地面处理等环节提升星载SAR成像质量。最后,对星载SAR图像后处理方法进行总结和对比,给出高分辨星载SAR图像相干斑去除、方位模糊抑制等处理结果。
2 星载SAR对地观测系统成像机理
如图1所示,星载SAR对地观测系统具备“观测在天、成像在地”的特点,其组成分为天、地两部分,即有效载荷和地面处理系统。其中,有效载荷发射相干信号,接收来自地面的回波信号,量化成数字信号,与卫星星历等辅助数据组成数据流,在星上存储,并适时下传至地面;地面处理系统对下传数据进行解码、成像处理、几何校正和辐射校正等操作,生成各级图像产品。
2.1 星载SAR有效载荷
图2给出了星载SAR有效载荷的基本结构,主要包括中央电子设备和天线子系统[8]。
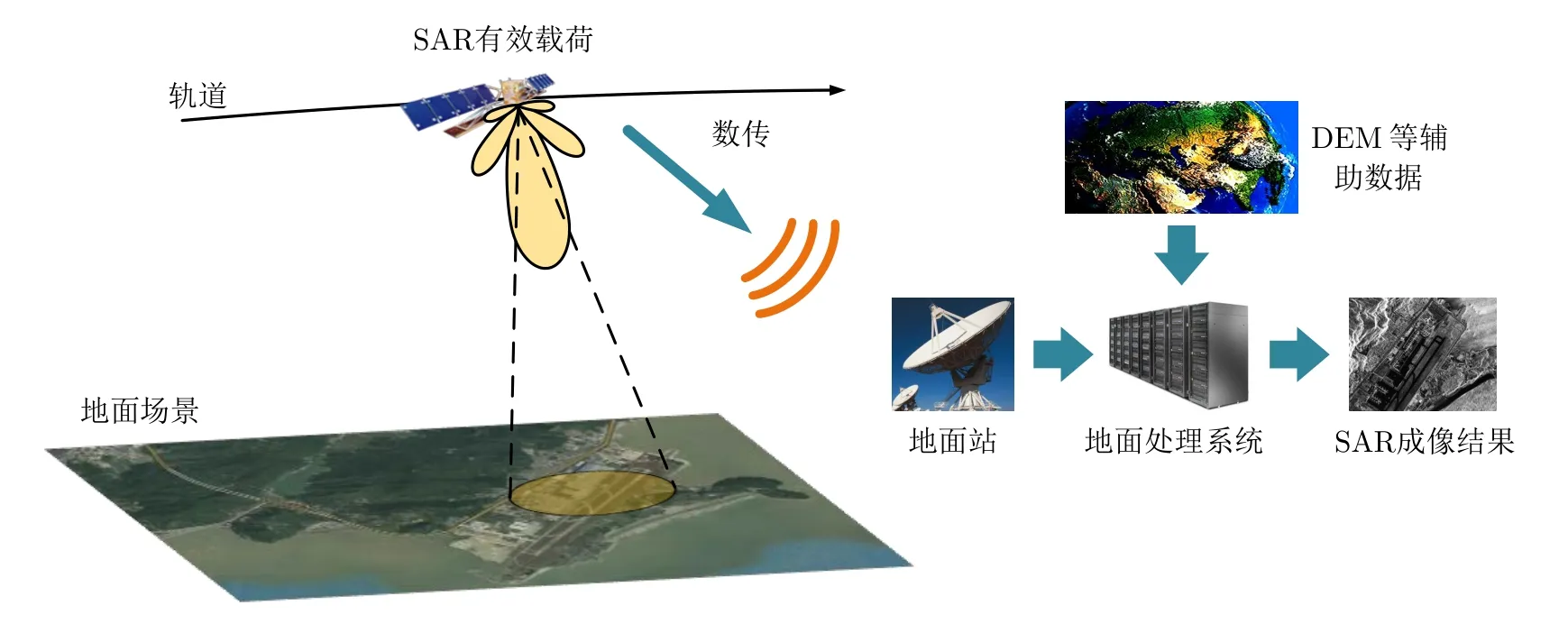
图1 星载SAR对地观测示意图Fig.1 Observation geometry of spaceborne SAR

图2 星载SAR有效载荷基本结构示意图Fig.2 Diagram of the basic structure of the spaceborne SAR payload
中央电子设备子系统根据地面遥控指令,选择星载SAR工作模式,控制和监测各分机的状态。作为有效载荷的核心子系统,其组成包括射频单元、数据形成器、内定标单元、雷达配电器、以及软件(含雷达控制监测软件、FPGA软件)等,具体功能如下:
(1)射频单元由基准频率源、线性调频源、接收通道等组成。基准频率源为各分系统和单机提供高度相干的基准信号,包括射频信号、中频信号、采样频率信号和定时频率信号。线性调频源根据控制指令产生符合指标要求的线性调频信号,经D/A转换后调制到射频上,然后放大至天线子系统所需的功率电平,作为发射信号输送给天线子系统。接收通道对回波信号进行低噪声放大、下变频和滤波,得到中频信号;再由可控增益中频放大链路进行中频信号放大,以适应雷达接收动态输出要求;最后,通过滤波、正交解调和视频放大完成视频信号的输出。
(2)数据形成器主要由ADC信号采集、高速数据缓存、数据压缩、增益控制、数据格式化打包等模块组成。数据形成器接收来自监控定时器的指令和外部辅助数据,根据指令要求完成接收机正交I/Q视频回波信号的模数转换,对窄带视频信号进行数字滤波,并对采样数据进行压缩,与外部辅助数据及其它辅助数据打包传送给数传分系统。
(3)雷达计算机完成对SAR有效载荷各模块的控制和监测。它一方面通过总线接收星务计算机发出的遥控指令和卫星辅助数据;另一方面执行遥控指令,对各模块进行控制,同时把各模块的监测参数送给星务计算机。雷达计算机还与天线子系统的波控分机通过串行数据总线进行通讯,对天线阵面进行波位设置,接收天线子系统的遥测参数。
(4)内定标单元主要完成系统幅相性能的标定,以保证系统性能及辐射精度。通过分析和处理定标数据,可以得到SAR系统(除天线波导子阵之外的发射通路和接收通路)总增益的相对变化量、收发通道幅相的变化。同时,定标数据还复制了SAR系统的线性调频发射信号,可以为成像处理提供参考,用于系统误差的校正。
(5)雷达配电器完成整个中央电子设备的配电工作。
天线子系统具有两维波束扫描能力,方位和距离向波束宽度与副瓣电平可以按波位设计要求进行展宽和赋形,满足聚束、条带及扫描等成像模式的使用;能够放大发射信号并向指定空域辐射电磁能量,并对回波信号进行接收与低噪声放大。SAR天线类型有抛物面和平面相控阵两种。它们的区别主要在于辐射波束形成和角度扫描的方式。抛物面天线主要包括反射面和馈源系统。平面相控阵天线则是由天线阵、馈电网络和波控器等组成(如图2所示)。各个部分的具体功能如下:
(1)天线阵由阵面辐射单元与发射/接收(T/R)组件组成。阵面辐射单元把馈送来的激励信号高效率地转化为微波信号,并辐射到自由空间,同时收集来自自由空间的微波信号,并将其转化为电信号。T/R组件既可以工作在发射状态,也可以工作在接收状态。当T/R组件工作在发射状态时,经馈电网络送来的低功率信号,经过移相器移相后,送到功率放大器,放大后的大功率信号通过环流器后经辐射单元向外辐射。当T/R组件工作在接收状态时,辐射单元接收的回波信号,经环流器、隔离器、限幅器、低噪声放大器、数字衰减器、开关和移相器,送到接收馈电网络中。
(2)馈电网络向辐射单元馈送需要的激励信号,同时接收辐射单元送来的信号,合成接收信号。
(3)波控器实现波束扫描以及对天线系统的监测和幅相校正。
2.2 星载SAR地面处理系统
不同于天基光学对地观测成像,星载SAR的回波数据类似于随机噪声,必须对其进行处理才能获得图像。早期的地面处理系统采用光学器件来实现SAR聚焦成像。但由于成像精度差、难以做到自动化处理,逐渐被淘汰。自SEASAT卫星之后,数字信号处理逐渐成为SAR成像的主流技术。
经过解调,孤立点目标的回波信号s0(τ,η)可以表示为[9]
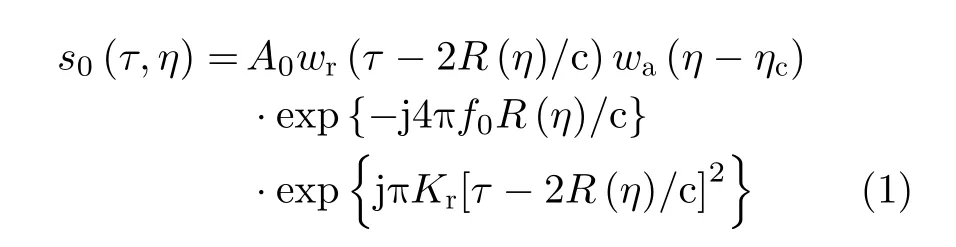
其中,A0为复常数,τ为距离向时间,η为方位向时间,ηc为波束中心穿越时刻,c为光速,f0为雷达载频,Kr为发射脉冲调频率,2R(η)为不同方位向时刻接收信号的双程斜距,wr(·)和wa(·)分别为距离向和方位向天线方向图。
如式(1)所示,回波信号的形成是卫星平台、有效载荷、空间传播等多个环节共同作用的结果。各个环节中不可避免地存在误差因素。其中空间段影响因素主要包括卫星定轨、平台姿态、中央电子设备和天线;传输段影响主要指对流层延迟等大气效应。这些因素共同影响了式(1)中发射信号的形式、瞬时斜距R(η)的精度、天线方向图wr(·)和wa(·)的幅相特性,使得实际回波数据和理论模型无法吻合,进而降低算法的有效性、影响成像质量。具体影响情况如下:
(1)卫星定轨是指获取卫星位置信息的过程。定轨误差主要影响瞬时斜距R(η)的精度。R(η)是构造方位向匹配滤波器的重要参数。它的偏差会使方位向匹配滤波失配,导致分辨率损失和旁瓣抬升。同时,R(η)也是利用距离-多普勒方程和地球模型方程计算目标位置的重要先验信息。因此,定轨误差也会影响目标的定位精度。
(2)卫星平台的姿态抖动会使得天线波束指向随之抖动,通过天线方向图wr(·)和wa(·)对回波信号产生附加调制,在成像结果中产生成对回波。当成对回波位于主瓣或离主瓣较近的旁瓣之间时,分辨率、峰值旁瓣比和积分旁瓣比等指标存在退化的情况。
(3)中央电子设备通常由3个回路构成:发射回路、接收回路和内定标回路。SAR系统发射信号通常被认为是理想的Chirp信号,回波信号则是经过延时和幅度调制的多个Chirp信号之和。成像处理算法往往也是基于这一假设进行设计的。然而,中央电子设备的发射和接收通道存在幅相误差,使得发射信号和接收回波无法与理想情况完全一致。此外,接收通道视频段会发生非线性饱和失真,对回波信号进行限幅,最终在SAR图像中产生寄生旁瓣,掩盖弱小目标。
(4)天线的误差因素主要来自于电性能和结构性能两方面。电性能方面,高分辨率星载SAR宽带发射信号的应用使得色散效应难以避免,波束指向和波束宽度会发生波动;结构性能方面,阵元位置发生偏移后,将破坏阵面的平整度和天线辐射场的方向性。这些因素都会经由非理想天线方向图对发射信号和回波信号进行幅相调制,最终影响成像质量。
(5)电磁波在经过大气对流层时会发生折射,有别于回波信号模型中假设的直线传播。虽然两者之间的差异对瞬时斜距R(η)造成的影响非常微小,但是仍旧会对亚米级高分辨率星载SAR的成像分辨能力产生影响。
SAR成像处理的核心思想是:在解除方位-距离耦合的基础上对回波数据进行精确的匹配滤波,获取高质量的高分辨图像。成像处理算法在设计2维匹配滤波器时,通常会对式(1)所示的回波模型作3点假设[10]:星载SAR停走假设、瞬时斜距的双曲函数形式、电磁波直线传播。对于高分辨率星载SAR而言,这3点假设与实际情况产生的差异足以引起成像质量的退化。
以上分析表明,可以采用两种技术途径来提升星载SAR成像质量:(1)在空间段,提高卫星平台的定轨精度和姿态测量精度,控制有效载荷产生的幅相误差等非理想因素;(2)在地面段,改进成像处理算法,通过模型修正、误差补偿提升成像质量。
此外,即使卫星平台、有效载荷以及地面处理系统的性能指标都满足要求,成像结果中依然会存在强点旁瓣、斑点噪声、方位模糊等星载SAR所特有的现象。需要开发相应的图像后处理模块,采用先进滤波技术对旁瓣、模糊等进行抑制,进一步提升图像质量。
3 星载SAR成像质量提升方法
本节将从高精度数据获取和高分辨成像处理两个方面阐述星载SAR成像质量提升方法。
3.1 星载SAR高精度数据获取技术
高精度原始回波数据的获取是星载SAR成像质量的重要保障。若要获得0.2 m分辨率星载SAR图像,定轨位置误差需要控制在亚米级,测速误差优于0.001 m/s,姿态测量误差优于0.005°。
(1)SAR卫星轨道高精度测定技术
高精度定轨技术可以获取精准的SAR卫星位置和速度信息。从70年代开始,卫星精密跟踪技术得到全面迅速的发展。从传统观测技术的改进到新技术的发明,以及相应观测网的建立,使得卫星轨道的跟踪观测精度和定轨精度都得到了大幅度地提高。目前,用于高精密定轨的跟踪手段有4种[11,12],包括卫星激光测距技术(Satellite Laser Ranging,SLR)、多普勒定轨和无线电定位集成技术(Doppler Orbitography and Radiolocation Integrated Satellite,DORIS)、精密测距和测速技术(Precise Range And Rangerate Equipment,PRARE)、全球定位技术(Global Positioning System,GPS)。其中,利用星载GPS对低轨卫星进行定轨具有诸多优点[13]:(1)不受气候条件影响,可以全天候观测;(2)观测精度高,数据密集,对低轨卫星实现全弧段覆盖;(3)与SLR,DORIS等其它主流观测手段相比,设备简单,故障率低,费用较低。
大量全球覆盖的GPS观测信息促使定轨方法得到了充分发展。国内外低轨卫星的GPS定轨方法主要归结为以下4种:(1)仅仅考虑卫星位置的运动学精密定轨;(2)在运动学基础上,采用了先验力模型的简化运动学定轨;(3)以卫星受力为主,其它观测技术为辅的动力学精密定轨;(4)考虑了经验力模型参数的简化动力学精密定轨。在实际应用中,上述方法可用于实时定轨和事后定轨。两者的差异主要在于输入数据类型、数据时效性和定轨精度,如表1所示。

表1 实时定轨和事后定轨比较Tab.1 Comparison between real-time and precise orbit determination
(2)SAR卫星平台姿态高精度测量技术
SAR卫星采用星敏感器计算卫星姿态来保证姿态的指向精度。除了星敏感器自身的测量误差外,星敏感器光学测量基准与整星控制基准之间的安装偏差、有效载荷与整星基准之间的安装偏差以及星敏感器与基准之间的慢变热变形引起的姿态偏差,都会影响到计算的精度。为此在进行姿态测量时,要尽可能地修正上述误差源。
目前,主流的姿态测量方法是星敏感器和陀螺组合法[14]。通过两个星敏感器的双矢量定姿提高光轴测量方向的星敏感器测量精度,再利用扩展卡尔曼滤波方法进行姿态确定,修正陀螺的漂移并抑制星敏感器的高频噪声,输出惯性系下的高精度姿态信息。引入轨道递推误差模型,最终得到轨道系下的卫星高精度姿态信息。
(3)中央电子设备发收通道幅相补偿与动态调整技术
利用无线延迟试验或者内定标技术,可以获得反映发收通道特性的测试数据或者内定标数据,并构建发收通道的幅频和相频特性模型。基于所构建的模型,设计距离向匹配滤波器,对回波信号进行通道幅相补偿,提升成像处理的聚焦性能。某SAR系统的信号带宽为600 MHz,脉冲宽度为12 µs,采样率为700 MHz。表2给出了对该SAR系统回波数据未补偿和补偿后的结果。经过幅相补偿,分辨率、峰值旁瓣比、积分旁瓣比等指标均有显著的提升。
对于接收通道,当信号动态范围与系统动态范围不匹配时,往往会发生饱和失真。接收机高频段和视频段饱和均会造成对信号包络部分的限幅,在成像结果中产生寄生旁瓣,导致场景内不同目标的相对强度关系发生变化。此外,视频段饱和失真还会造成与真实目标频谱相混叠的高次谐波,影响真实目标的成像质量[15]。在实际SAR系统中,高频段动态范围远远大于视频段动态范围,信号在高频段发生饱和的概率较小。因此,视频段饱和更值得关注。
造成视频段饱和的主要因素是接收机增益(MGC)设置不当。目前主要有两类方法构建星载SAR系统全球MGC库。一种方法是通过大量的在轨观测,获取全球典型观测场景和地物目标的后向散射数据,进一步根据雷达方程反演MGC值;另一种方法是基于回波数据的统计特性,以最大量化失真比为准则,从饱和信号中反演接收机MGC,调整A/D量化输入信号的动态范围,使得A/D量化达到最佳状态,提升星载SAR成像质量。
图3给出了上述第2种方法对MGC反演后的仿真成像结果。该结果对应的仿真场景是一个点面混合场景,包含了口字形面目标区域和中心的正方形点阵目标。图3(a)是饱和SAR回波数据的成像结果,中心区域的正方形点阵目标几乎被面目标的寄生旁瓣淹没;图3(b)是MGC反演后的成像结果,正方形点阵目标更为清晰,表明接收机增益的调整有效地消弱了饱和效应产生的寄生旁瓣。
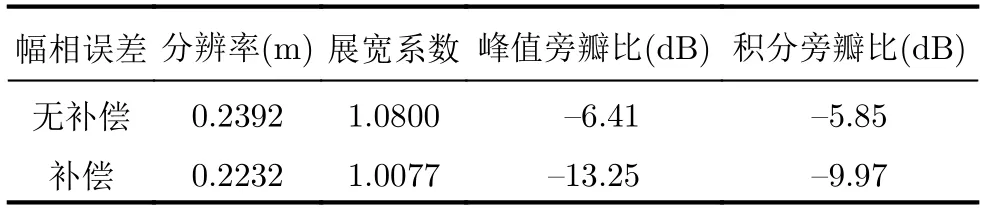
表2 通道误差补偿前后脉冲压缩性能Tab.2 Performance of pulse compression before and after compensating for channel error
(4)星载SAR天线系统优化与方向图预估技术
在SAR成像和图像处理中,天线方向图是重要的先验信息。虽然可以通过对在轨SAR卫星进行实测,获得精确的天线方向图,但是,高分辨率SAR卫星工作模式复杂,波位数量成百上千,使得天线方向图全波位测试变得困难。因此,采用高精度模型预估天线方向图,是更为可行的方法。这种方法可以用于SAR有效载荷总体性能的有效评估,也缩短了产品的研制周期,是目前国际星载SAR工程领域中较为推崇的一种方法。
在天线方向图模型的构建过程中,基于理想方向图模型,考虑工程实现中的两类关键误差因素:(1)幅相误差,主要指由于器件、内部电路或装配等原因造成的天线单机实测性能指标与理论指标存在的幅相误差;(2)机电耦合误差,包括天线机构的展开精度、安装面平面度、热变形等因素引起的方向图误差。利用地面近场测试系统在不同阶段通过原理样机、电讯星和正样实物来获取基础实测数据,分析实测数据与模型仿真结果的差异,不断调整模型参数,改善天线方向图模型的精度。
在预估天线方向图的基础上,建立SAR成像质量指标(脉冲响应特性、模糊性能、等效噪声系数等)与方向图性能指标(波束指向精度、副瓣电平、波束宽度、栅瓣电平等)的映射关系,对星载SAR天线系统的布局、方向图性能等进行优化设计。具体措施包括:(1)调整天线布局,优化天线扫描栅瓣;(2)合理分解单机指标,控制系统的幅相误差;(3)控制展开精度和装配精度,保证天线指向误差控制在合理范围;(4)利用天线热控措施来保证天线阵面温度的稳定性和均匀性,进而控制天线阵面温度引起的幅相误差。

图3 MGC反演前后的成像结果Fig.3 Imaging results before and after MGC inversion
综上所述,图4给出了天线系统优化和方向图预估的总体技术路线,包括:(1)提取影响星载SAR成像质量的天线方向图指标因素,如天线增益、波束指向、噪声系数等;(2)建立影响方向图技术指标的各单机模型,分解各单机的技术指标到单机模型中,对天线系统进行优化;(3)建立影响成像质量的重点因素模型,如热变形、安装误差等模型,同时考虑T/R组件的失效模式;(4)将模块、初样电讯星、正样测试数据与天线方向模型进行对比,来验证模型的正确性和精度;(5)通过迭代设计完善高分辨星载SAR天线方向图模型。
3.2 星载SAR高分辨成像处理技术
(1)基于改进运动模型的星载SAR成像补偿技术
SAR通过对回波数据进行相位校正和同相叠加来获得高分辨率图像。成像质量的好坏主要取决于两点:成像参数的精度和成像算法的近似程度。其中,前者主要由各种测量器件的性能决定,后者则主要取决于算法中所采用的运动模型的精度。经典的成像算法,例如距离-多普勒算法[16]、Chirp Scaling算法[17]等,都是在对平台运动做了两个基本假设的前提条件下得到的。这两个假设分别是:停走假设和直线运动假设。
在低分辨率条件下,这两个假设引入的误差可以忽略不计。但在高分辨率条件下,SAR卫星合成孔径时间长,停走假设和直线运动假设将会在成像处理中引入较大的残余相位,使得成像质量衰退,无法满足性能指标要求。以0.3 m分辨率X波段星载SAR为例,二次和高阶残余相位可达300°,分辨率损失约4%。
John C.Curlander等人[9]分析了停走假设引入的斜距误差,指出分辨率低于2 m的星载SAR系统可以采用停走假设。为了获得X波段0.21 m分辨率图像,Pau Prats-Iraola等人[10]指出在地面处理系统中必须对轨道曲率和发收期间卫星运动引入的残余相位进行补偿。
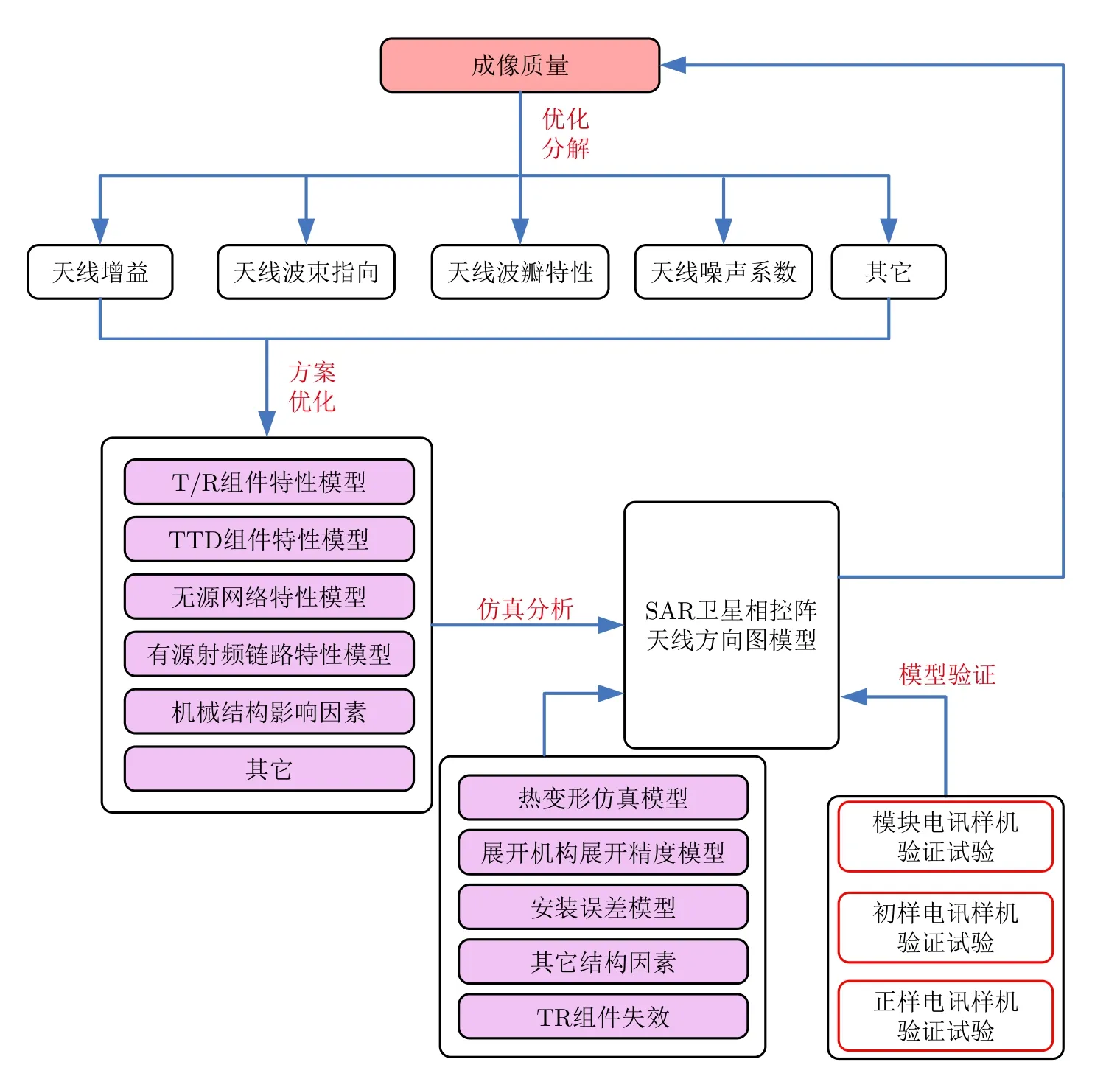
图4 星载SAR天线系统优化和方向图预估技术示意图Fig.4 Diagram of optimization and pattern estimation technology for spaceborne SAR antenna system
为了能够实现大场景、高分辨率成像,改进SAR卫星运动模型,并在此基础上开发新的算法,是有效的技术路线之一。刘燕等人[18]对运动模型进行了修正,在直线假设的基础上考虑了卫星在信号发收过程中的位移,改进了成像算法,可以获取0.2 m分辨率、8 km(距离向)×4 km(方位向)幅宽的图像;Yuan Wu等人[19]提出了等效加速度距离模型;于泽等人[20]基于连续直线运动模型,考虑了轨道弯曲因素,提出了连续切线运动模型,将每个发收期间的星载SAR运动轨迹用轨道切线来近似,并假设SAR沿近似轨道连续运动。基于连续切线运动模型,对回波数据进行补偿,能够获得更好的成像质量。针对高分辨率星载SAR,参数如表3所示。图5给出了35°视角下的点目标仿真实验结果。该点目标沿方位向偏离场景中心7.5 km。表4的指标评价结果表明,补偿后距离向和方位向分辨率提升均优于7%,点目标响应特性也恢复为标准的sinc函数。虽然补偿前的距离向峰值旁瓣比和积分旁瓣较好,但这是以分辨率的损失为代价的。仿真结果表明,该补偿算法在全场景内的成像一致性较好,未发生明显的辐射质量不均匀和几何畸变现象,能够满足高分辨率星载SAR系统的成像要求。
(2)对流层传播效应补偿技术
由于大气密度的变化,电磁波在经过大气对流层时会发生折射,造成对流层延迟,使得卫星与目标之间的视在距离和真实距离存在偏差,在回波相位中引入附加相位,进而影响方位向成像质量[21]。对于0.3 m分辨率SAR卫星,在标准大气参数下,对流层延迟可以使主瓣展宽1.39%~10.97%,峰值旁瓣比下降1.0~5.5 dB,积分旁瓣比下降范围1.0~4.5 dB。为了补偿对流层效应对高分辨率星载SAR成像质量的影响,可以采用指数与余弦函数相结合的模型[10],也可以通过IGS(International GNSS Services)实测数据优选适合高分辨率星载SAR的对流层天顶延迟模型和映射模型,估算不同视角下的对流层延迟量。
在对流层天顶延迟模型方面[22],虽然EGNOS模型的输入参数简单,只包括观测纬度、观测日期和高程信息,但其引入的天顶延迟误差至少有90%的几率在-9~11 cm之间,可以满足对地观测的需求。在映射函数方面,国际公认的模型有:CFa2.2,MTT,NMF与Ifadis。在15°~55°视角下,4个映射函数模型引起的对流层总延迟误差相互之间不超过4 mm。考虑到NMF输入参数简单,推荐使用NMF映射函数。

表3 仿真参数Tab.3 Simulation parameters
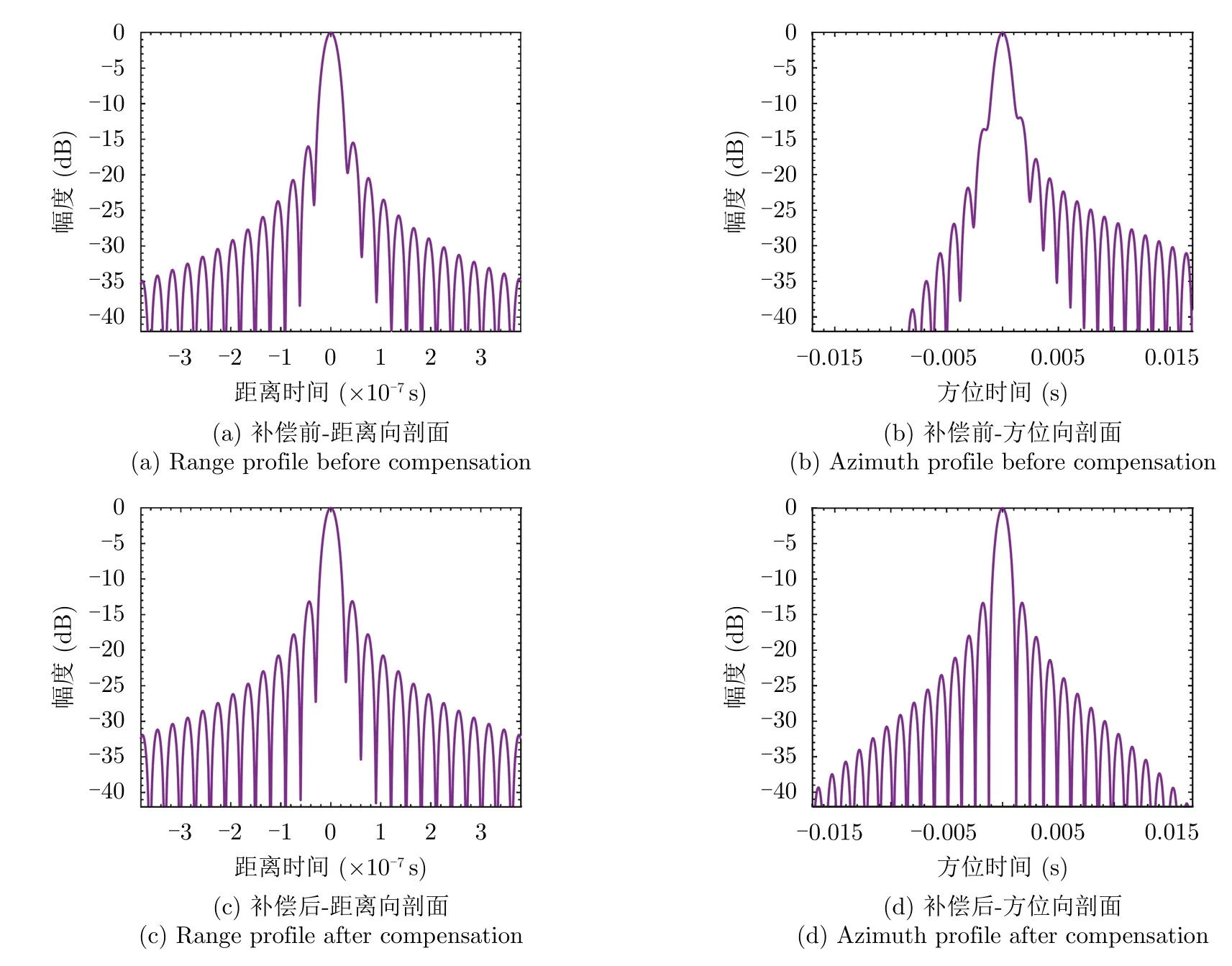
图5 停走误差补偿前后成像结果对比图Fig.5 Comparison of imaging results before and after the compensation of stop-go phase error
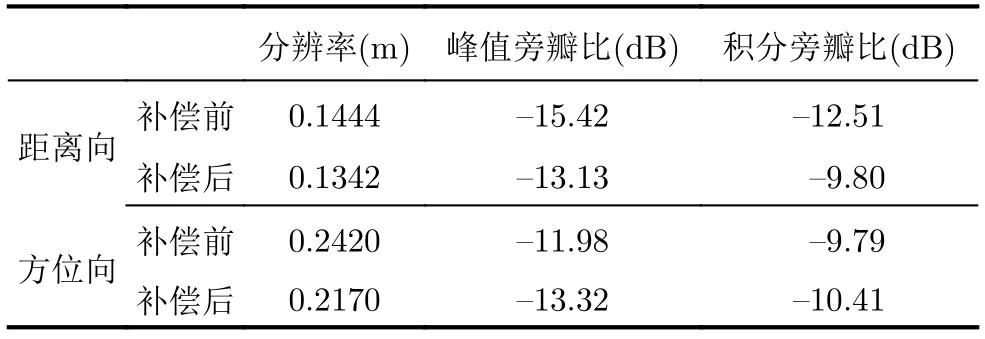
表4 停走误差补偿前后成像质量评估结果Tab.4 Imaging quality evaluation of point target before and after compensating for stop-go error
基于观测场景的纬度、高度角、高程数据和观测日期等参数,通过EGNOS模型获取对流层天顶延迟量,利用NMF映射函数拟合得到本次观测的对流层影响因子,进一步计算距离向补偿因子与方位向补偿因子,并分别在成像处理的前段和末段进行距离向和方位向补偿因子的校正,可以得到对流层延迟效应补偿后的成像结果。表5给出了视角为15°,35°和55°时对流层延迟补偿前后的对比结果。可以看出,高分辨率星载SAR对流层延迟补偿方法可以有效地改善大视角范围内全场景的成像质量。
4 星载SAR图像质量提升方法
(1)SAR图像相干斑抑制技术
不同于光学图像处理当中所遇到的高斯噪声、椒盐噪声等,SAR图像中的相干斑噪声是真实的电磁测量结果,是所有相干成像系统固有的原理性噪声。这种乘性噪声降低了图像的辐射精度,造成了目标识别率和图像分割精度的下降[23]。
早期的相干斑抑制方法是以牺牲分辨率为代价的多视处理。此后,4类非多视处理的方法被提出。
第1类,是局部空域滤波方法[24]。其中的代表算法包括Kuan滤波和最大后验滤波等。这类方法基于贝叶斯准则和斑点噪声模型,对图像进行空域滤波,在抑制噪声的前提下保留了空间分辨性能。但是,由于斑点噪声模型不适用于对边缘强点和纹理细节的滤波操作,导致了边缘细节等难以保持。
第2类,是变换域方法,例如小波域上的线性最小均方误差滤波[25]。由于变换域能够较好地区分边缘纹理区域和均匀区域,该类方法能够有效地保持纹理细节。但是,这类方法依然是基于图像的局部特性,容易产生伪吉布斯效应。
第3类方法主要根据图像中各个像素的特性来进行自适应滤波[26],包括基于偏微分方程(Partial Differential Equation,PDE)的同向异性滤波方法、非局部方法等。PDE方法是一种边缘敏感的去噪方法,其核心在于求解偏微分方程。在反复迭代过程中,它能够逐步消除图像中的斑点噪声,但也会损失纹理细节。而非局部方法利用图像中相似像素或者相似像素块进行联合滤波,能够在抑制噪声的同时,保留边缘和细节。PPB(Probabilistic Patch-Based)算法由Deledalle等人[27]于2009年提出,是非局部方法的代表作,也是目前最有效的斑噪抑制方法之一。PPB算法根据像素点和参考点的相似度去选取像素,赋予不同的权重,利用相似像素和它们对应的权重对参考点进行滤波操作。SARBM3D(SAR Block-Matching 3D)算法也是非局部方法的代表之一[28]。与PPB算法不同的是,它根据像素块与参考块的相似度去选取像素块,将相似的像素块堆叠为一个3维的矩阵,然后进行小波域上的最小均方误差滤波。
第4类,是基于深度学习的相干斑抑制算法[29-31]。这些算法大都沿用了光学图像去噪网络,仅改动了训练和标签数据。其中,文献[29]提出了基于DnCNN(Denoising Convolutional Neural Network)的ID-CNN(Image Despeckling Convolutional Neural Network),采用Conv-BN-Relu(Convolutional layer -Batch Normalization layer -Rectified linear unit)级联方式;文献[30]提出了基于膨胀卷积的SARDRN(Dilated Residual Network)。此外,还有采用生成对抗网络进行SAR图像相干斑抑制的ID-GAN(Image Despeckling Generative AdversarialNetwork)[31]。由于缺乏无噪的真实SAR图像作为标签数据,目前大都采用向光学图像添加斑点噪声的方式生成训练数据集,将对应的光学图像作为标签。然而,训练和测试数据统计特性的差异,制约了深度学习方法的相干斑抑制性能。总的来说,基于深度学习的相干斑抑制算法仍处于研究初期,还有很大的提升空间。

表5 不同视角下目标对流层延迟补偿前后对比Tab.5 Evaluation results before and after tropospheric delay compensation with different looking angles
图6给出了基于改进PPB算法[32]的相干斑抑制结果。其中第1列为原始SAR图像,第2列为滤波后的图像。表6给出了定量化评价指标。对图6中的匀质区域1,等效视数(ENL)由原始的0.9996和1.0420分别提升至36.3338和67.2727。同时,边缘保持因子(EPI)也得到了较好地保持,两幅图的边缘保持因子分别为0.9484和0.9480。可以看出,该算法无论是对于均匀区域的去噪还是纹理信息的保持都有较好的效果。
(2)SAR方位模糊抑制方法
方位模糊本质上源于天线方位向主瓣和副瓣回波在频域发生混叠。在星载SAR系统设计过程中,提升脉冲重复频率可以减少方位模糊能量对成像质量的影响。但是,受限于观测幅宽和距离模糊度的指标要求,脉冲重复频率不能无限制提高,方位模糊总会存在于图像中。对于动态范围较大的观测场景(譬如近岸区域),方位模糊现象尤为明显。由于混叠的模糊能量在SAR成像过程中也得到了部分聚焦,方位模糊会在SAR图像中产生虚假目标,影响目标检测与图像解译[33]。
目前,主要有4种方位模糊抑制方法。其一是Moreira等[34]提出的“同相相消法”。该方法利用星载SAR系统的先验信息构建一对理想滤波器,通过对消滤波结果的方法估计并抑制方位模糊。该方法仅适用于由孤立强散射点产生的方位模糊。为了能够有效地抑制由分布式目标产生的方位模糊,陈杰等人[35]提出了一种“图像修补法”。该方法通过模糊地图找到干扰严重的局部区域,并利用样例修补技术进行重建,即寻找待处理区域周围最类似的像素块予以替换。不过,该方法仅仅完成了纹理合成,难以保证重建内容的准确性。Guarnieri等人[36]提出了一类普适性更强的“频域滤波法”。该方法的核心思想是:通过天线方向图求得局部方位模糊度,构建带通滤波器来抑制方位模糊。虽然该方法能抑制方位模糊近15 dB,但存在方位向分辨率损失。此外,上述3种方法都有一个共同的假设,即观测场景中任意两个不同位置处的目标所受的天线方位向方向图加权是一致的。由于该假设仅对条带模式有效,这些方法的适用范围受到了限制。

图6 原始SAR图像和斑点噪声抑制后的结果Fig.6 Results of speckle suppression
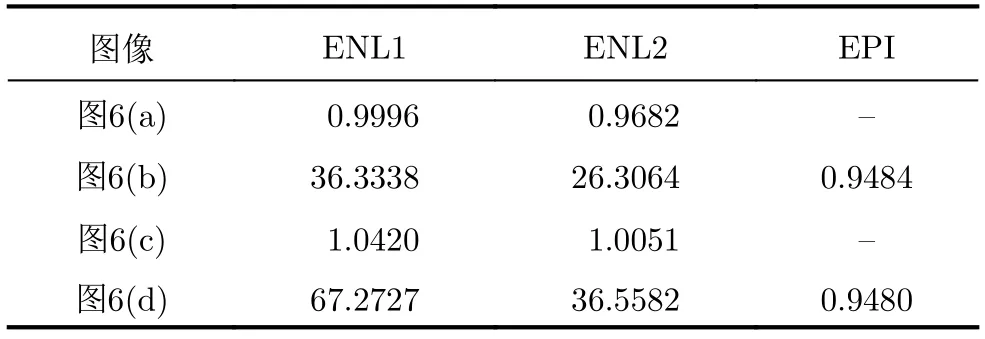
表6 斑点噪声抑制指标Tab.6 Speckle noise suppression performance
为了能够在星载SAR所有工作模式下对方位模糊进行抑制,吴有明等人[37]提出了一种基于自适应谱截断和外推的方法。该方法通过准确估计方位模糊比函数,选取受方位模糊能量影响较少的频谱,并对其进行外推,获得完整的频谱。图7(a)给出了原始的聚束模式星载SAR图像。其中,红色矩形框选区域受方位模糊干扰较强;图7(b)是采用自适应谱截断和外推方法后的方位模糊抑制结果。定量评估结果表明,对红色矩形框选区域中的方位模糊能量抑制达到了22.95 dB。同时,图像的空间分辨率得到了较好地保持。
(3)星载SAR旁瓣抑制技术
从谱域成像的角度,SAR成像就是要获取目标空间频谱的支撑区分布,而后通过傅里叶变换来重建观测场景的图像。支撑区的范围与成像分辨率直接相关,其形状与成像冲激响应的旁瓣幅度和走向有着对应关系。SAR图像中强目标旁瓣会掩盖附近的弱目标,使得弱目标无法检测出,降低了相邻目标之间的可区分性。
谱加权方法是传统的SAR旁瓣抑制方法之一,通过在频域对成像结果进行加权来弱化频谱边缘处的不连续性,降低主瓣能量的泄漏。该方法以损失分辨率为代价来压低旁瓣[38]。
谱变形技术基于旁瓣走向与空间频谱支撑区形状的映射关系,常以最大化旁瓣走向差异度为条件,通过不断改变谱变形方式来搜索出最优的联合谱变形准则。使用该准则对空间频谱支撑区进行变形,可以得到2维/多维旁瓣走向同时发生改变的SAR图像。在抑制旁瓣的同时,该方法通过主旁瓣分离来保持主瓣宽度,即分辨率。
基于稀疏重建理论[39],能够获得优异的旁瓣抑制性能,尤其是对孤立点目标。同时,分辨率和相位也都得到了较好地保持。但是,重建性能易受噪声影响。因此,该方法不太适用于城区等复杂场景的旁瓣抑制问题。
改变信号形式,也可以达到旁瓣抑制的效果[40,41]。非线性调频信号的调频率由脉冲两端向中心处逐渐减小,其频谱呈现为锥削状。非线性调频信号经过匹配滤波后,旁瓣得到抑制,但是主瓣有所展宽。
空变切趾滤波算法(Spatially Variant Apodization,SVA)是一种非线性的自适应加权算法[42]。对于图像中的每个像素,它从一组升余弦类加权窗函数的处理结果中找到幅度最小值,在不改变主瓣的基础上抑制旁瓣。鉴于SVA的鲁棒性,该方法及其改进方法在工程实际中大量应用,取得了较好的结果。图8(a)所示的单视复图像经SVA算法处理后,得到图8(b),峰值旁瓣比、积分旁瓣比平均改善约23.34 dB和22.15 dB,并且主瓣宽度基本保持不变。

图7 方位模糊抑制效果Fig.7 Azimuth ambiguity suppression result
上述基于改进PPB的相干斑抑制方法、基于自适应谱截断和外推的方位模糊抑制方法、SVA旁瓣抑制方法适用于所有的SAR工作模式,所能达到的性能指标与待处理图像的具体特征有关。SAR图像质量提升方法总结如图9所示。
5 结束语
本文对以高精度数据获取、高分辨率成像处理、图像后处理为代表的星载SAR成像和图像质量提升技术进行了总结,给出了实验结果。目前,星载SAR都是在空间段获取数据、在地面段进行高精度成像和图像处理。随着星上实时处理和大斜视成像技术的发展,星载SAR智能对地观测机制也是提升星载SAR成像和图像质量的技术途径之一。可以通过星上大斜视粗成像获取初步的图像结果,结合遥感应用需求动态调整有效载荷参数,使得数据获取、数据处理、遥感应用形成闭环,不仅能够获取高质量图像,而且可以进一步改善星载SAR的应用效能。
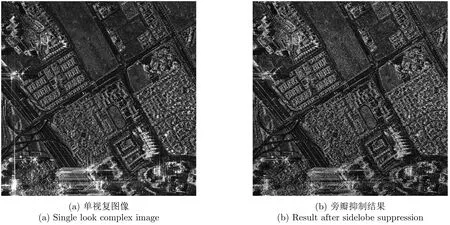
图8 SVA处理结果Fig.8 SVA result
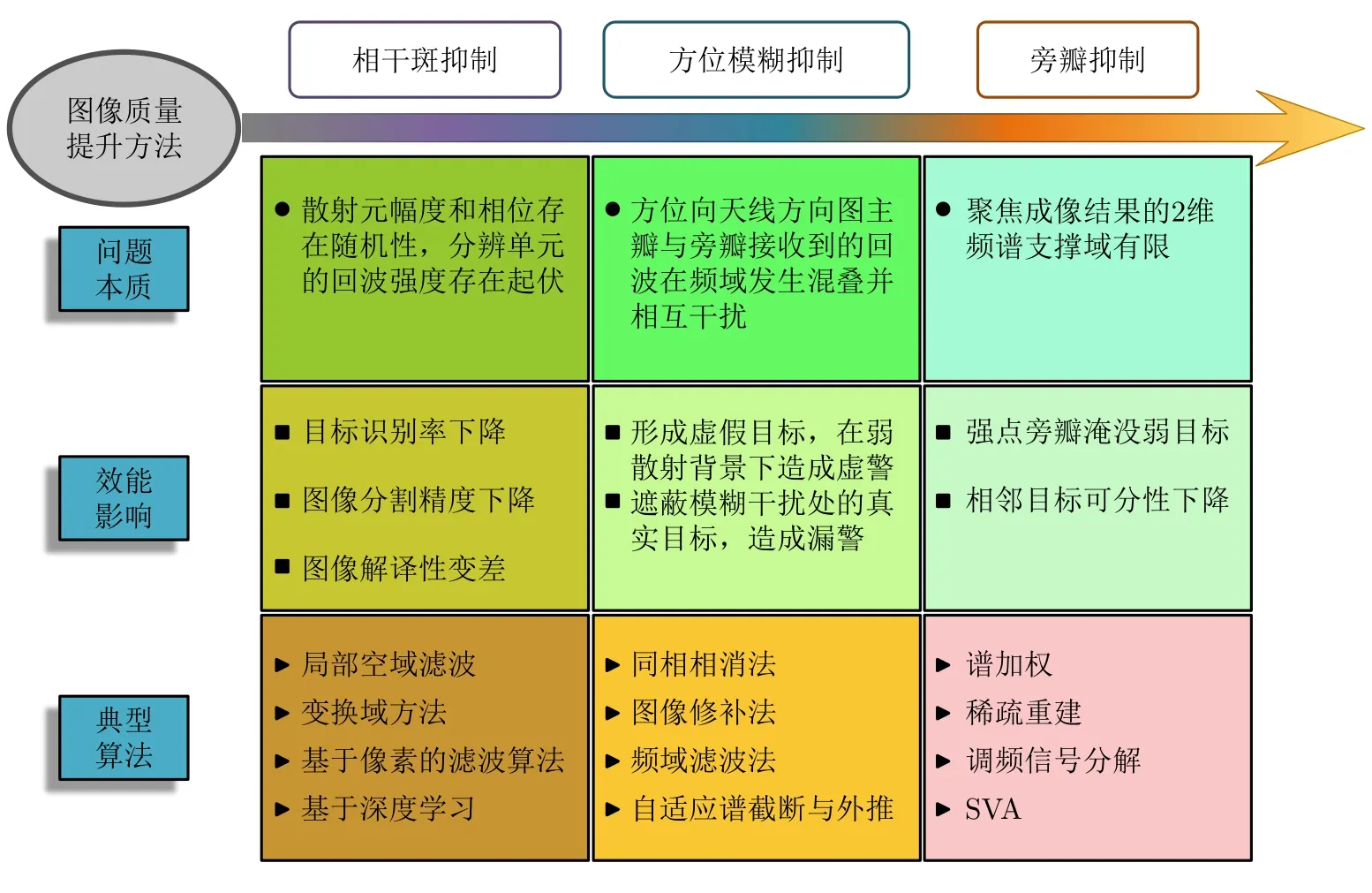
图9 SAR图像质量提升方法总结Fig.9 Summary of SAR image quality improvement methods