雷达对地成像技术多向演化趋势与规律分析
2020-01-17杨建宇
杨建宇
(电子科技大学 成都 611731)
1 引言
上世纪六十年代前后,人类掌握了微波相位的控制和利用技术,因此,几乎同时产生了相控阵雷达、脉冲多普勒雷达和合成孔径雷达。至今它们依然是雷达的主流技术体制,而且处在持续的完善和演变过程之中,以期获得更高的性能和新的功能,去适应多元化的任务,满足不同应用场景的需求。
自从1951年Carl Wiley提出合成孔径的最初概念后,以合成孔径为代表的雷达对地成像技术得到了很大的发展,并沿着多个方向演化。而且,这种演化仍在持续,整个雷达对地成像技术领域呈现出生机勃勃的多向演化态势。分析、认识和理解这种态势,探究其形成的内部因素、外部动因和相互作用关系,有利于把握雷达对地成像技术的发展脉络,认清发展规律,推演未来发展。
试验设计采用室内盆栽试验,试验设置6个不同处理:未添加化学修复剂(CK)、2%骨炭(A)、2%活性炭(B)、2%磷矿粉(C)、2%土壤修复剂Ⅰ(D)和2%土壤修复剂Ⅱ(E)。每个处理4次重复。土壤培养容器为1 500mL塑料盆,每盆置入1 000g自制混合土样,按照试验设计的比例称取相应的化学修复剂(各20g)加到土壤中,并混合均匀,恒温恒湿(20℃-22℃,湿度65%)。在每个塑料盆中分别种植已筛选出的富集乡土植物油菜、马铃薯、狼尾草、小麦、刺儿菜、巴天酸模,在户外栽培100d,测定土壤中重金属含量,评价试验用的修复剂对重金属污染土壤的修复效果。
对于雷达对地成像技术发展的态势,可以从不同的观察视角进行分析,从而得到不同侧面的认识和结论,以服务于不同的目的。这方面已经有一些很有价值的文献[1-4]可供参考和借鉴。如果立足于信息获取的方式、系统构成的形态、回波处理的方法、成像结果表征的方式和实际应用中的功效等方面,从地表及附着物信息的采录、归位、表征和提取全链条的宏观视角,去分析和梳理雷达对地成像技术的发展态势,并结合它与视觉感知的相似性去理解,还可以得出一些新的认识,并从中有所感悟,进而发现技术演化走向的规律性和必然性,利于承前启后,促进技术创新。
摘 要:新时期新常态背景下,我国社会经济逐步进入转型升级阶段,在此过程中遇到的各种问题对社会经济的进一步发展有一定程度的阻碍作用。而供给侧结构性改革是解决这些问题的重要策略,在这个视角下的高等教育改革也显得迫在眉睫。对供给侧结构性改革视角下高等教育改革中存在的问题进行分析,并在此基础上提出供给侧结构性改革视角下高等教育改革的有效策略,可以供相关人员参考。
本文将从8个主要的侧面去分析雷达对地成像技术的发展态势,探究发展过程中内外因素的相互作用,归纳总结发展演进的规律,并据此推演未来发展方向。
校企合作“双主体”办学,使得教师进企业没有了门槛,师资“双师”建设补充成为长效机制。以培养师资在行业应用前沿技术领域的能力为中心,同时让学生能够接收到一线企业工程师的宝贵工作经验,建立校企互聘互兼、互培共育机制,采取专职与兼职并举的方式让企业工程师走进课堂,让教师走进一线生产工作岗位。通过参与项目研发、课题研究、技术服务、指导技能竞赛,以及访学、培训、研修、学术研讨、引进等途径,建立一支由专业带头人、骨干教师、兼职教师组成的工程实践能力强、梯队合理的“双师型”优秀教学团队。
2 雷达对地成像技术的发展趋势
总之,加强护生在校法律知识教育,增强法律与临床实际的结合,使护生做到学法、守法、用法,自觉防范护理差错及医疗事故发生,促进护理法律教学整体质量的提高,让实习生成功走上临床护理工作岗位,优化护理质量。
(1)成像结果表征由单色向彩色、由平面向立体、由静态向动态演化,将进一步向兼具彩色、立体和动态表征能力的方向演进。
合成孔径雷达(Synthetic Aperture Radar,SAR)图像通常以单色灰度图像形式出现,它对应着单一工作频段、单一极化组合、特定观测视角和单次观测航过。多波段或多极化SAR[5-8]利用共平台安装的多个频段或多个极化通道,共视观测同一地域,感知地物对不同波段、不同极化的散射特性差异,从而获得彩色1严格意义上属于伪彩色,文中为表述方便,简称为彩色。图像,其中的颜色用于表征地物除散射强度以外的其它信息。与人眼用色彩感来表征物体对不同波长光波的散射强度类似,相比于单色图像,彩色图像能够更有效地呈现地物特征的差异,凸显出单色图像无法表达的信息,利于地物分类与识别。例如,2016年发射升空的我国GF-3遥感卫星,搭载了中国科学院电子学研究所牵头研制的我国首部星载全极化SAR[9,10],所获得的彩色图像用不同颜色表征地物的不同极化属性[11,12],使不同类型的地表能够更容易辨识和区分,如图1所示。
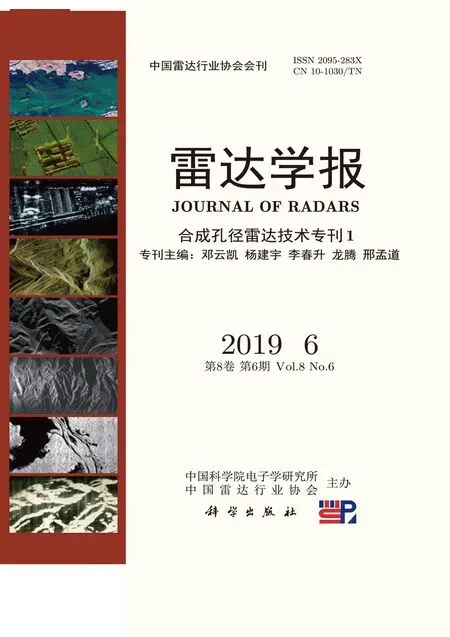
单波段和单极化SAR利用多视角或多时相的方式观测同一区域,能够感知地物散射的方向性和时变性,也可以获得彩色图像。例如,利用欧空局ERS-1/2遥感卫星获取的苏州地区SAR数据,中国科学院遥感应用研究所通过差分干涉处理得到的彩色图像,可直观地反映两年间该地区不同地域的沉降情况差异[13],如图2所示;中国科学院电子学研究所利用不同观测方向的SAR图像进行融合,得到的彩色图像,可以直观地反映地物散射的方向性特征,如图3所示[14]。
立体图像可提供平面图像缺失的目标高程信息,更加准确地反映地表及附着物的形貌,利于提升地物的辨识度。获取地表立体图像的基本途径是采用切航迹多通道SAR技术,以构成切航迹干涉效应或形成切航迹孔径。例如,干涉合成孔径雷达(Interferometric Synthetic Aperture Radar,InSAR)[15]在切航迹方向安装有两个以上有一定间距的接收通道,可以感知通道间的回波相位差,并利用通道间相位差与地表高程的定量关系,反演出地表高程信息,如图4所示[16]。

图1 GF-3星载全极化SAR图像[11]Fig.1 GF-3 spaceborne fully polarized SAR image[11]
但是,InSAR只能够获得各距离-方位分辨单元的高程信息,对同一分辨单元中不同高程的多个散射体并没有分辨能力。因此,InSAR所获取的立体图像并不是真三维的,所以,有时也通俗地称为“二维半”。而且,在InSAR中,地表的高程突变会造成相位解缠出现错误,从而造成地表高程测量值出现差错。此外,InSAR采用下斜视观测方式,容易受到遮挡和阴影的影响,对地表起伏的适应性存在明显的局限性。所以,InSAR并不适用于高起伏和陡变地表的立体成像。
极化干涉SAR(Polarized Interferometic SAR,Pol-InSAR)是一种相近原理的立体成像技术,它可以利用树冠和地表的极化特性差异,在所获得的立体图像中,反映出平坦和起伏地表上植被的错落生长形态,如图5所示[17]。
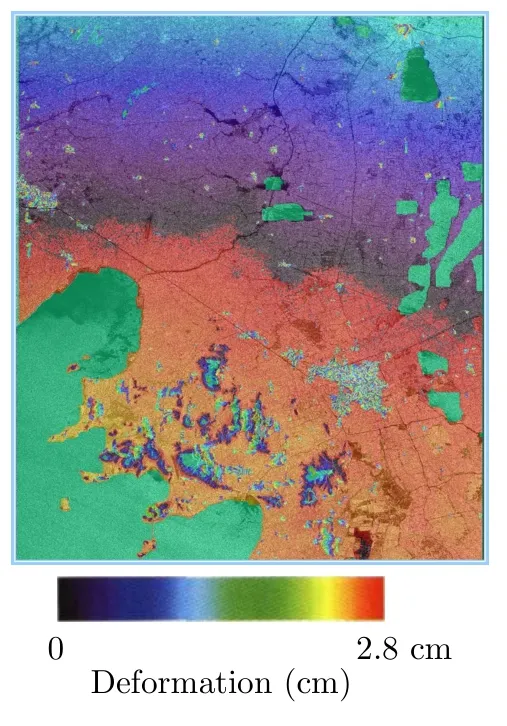
图2 用色彩表征视向形变量的SAR图像[13]Fig.2 SAR image with color representation of line-of-sight deformation[13]
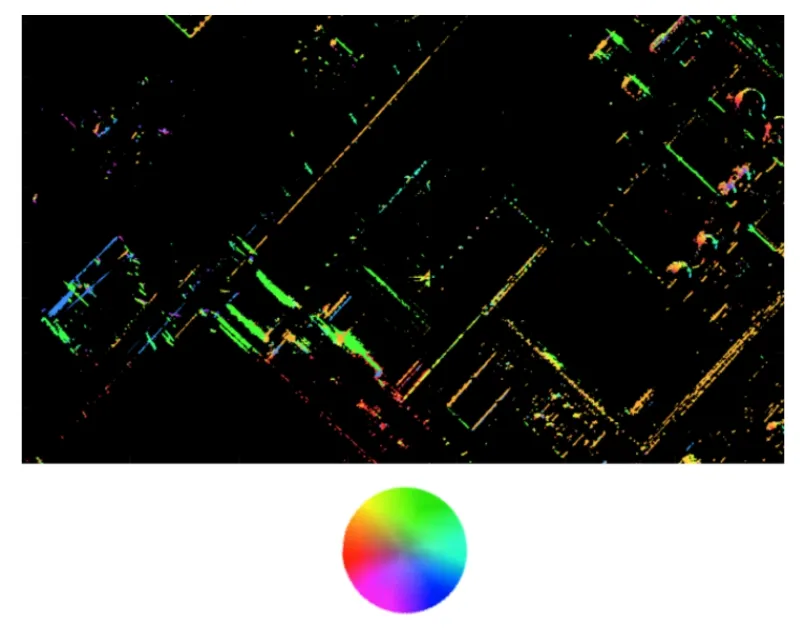
图3 用颜色表征地物散射方向性的SAR图像[14]Fig.3 SAR image with color representation of ground scattering directivity[14]
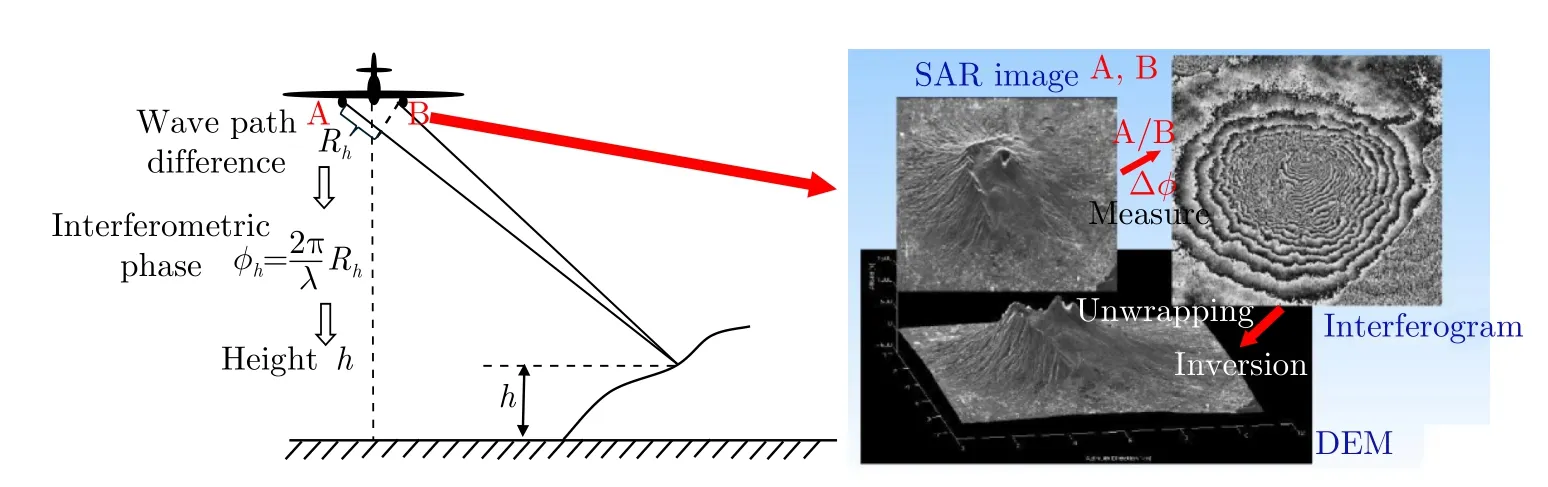
图4 干涉SAR成像原理及维苏威火山成像结果[16]Fig.4 InSAR imaging principle and imaging result of Vesuvius volcano[16]

图5 极化干涉SAR原理与地物三维成像结果[17]Fig.5 Principle of Pol-InSAR and three-dimensional imaging result
在毫米波和太赫兹等高频段,或雷达平台相对于目标高转角率运动时,只需要较短的合成孔径时间,即可实现对地成像,因此,可形成高帧率(例如5帧/秒)的SAR图像序列,连续播放时可以形成类似视频的动态效果,能够表现地表及附着物的短时变化动态,所以也称为视频SAR[18]。它是当今合成孔径雷达技术领域最引人注目的发展方向之一,也是合成孔径这只微波眼完全可预见的必然演化走向。国内外有不少单位在从事相关研究工作[18-20]。例如,美国圣地亚国家实验室(Sandia National Laboratories)获得的视频SAR成像结果[19],如图6所示。可以观察到,在若干间隔帧的图像之间,路面上汽车阴影出现明显的位置(图6中箭头所指)移动。视频SAR的这种特性使它可用于对地面目标运动情况的实时监控。
其实,如果淡化波动性的影响,且从定性和通俗的角度来讲,合成孔径雷达成像技术,好比给我们头顶上配个微波矿灯(发射微波的天线),在一片黑暗中,去照向我们要看的地域,还合成一只微波眼睛来。用这只另类的眼睛来观察世界,看到的是一个由无数尺寸和朝向不同的小镜面组成的起起伏伏的破碎大镜面,如图7(a)、图7(b)所示。这些不那么平整的小镜面,间或反射出我们头顶那盏矿灯的影像(亮点)。这些亮点能否勾勒出地物的形貌,就要看这只微波眼所处的频段了,还要看这些小镜面的朝向比例和组合关系了。在较低的频段,世界和万物并不是那么破碎,有更多较大尺度的小镜面,如图7(a)所示,我们只能星星点点地看到头顶上那盏矿灯的影像,很难勾勒出地物的轮廓形貌,即便我们的微波眼有足够大的孔径和足够高的清晰度,也很难辨识出地物来,如图7(c)所示。
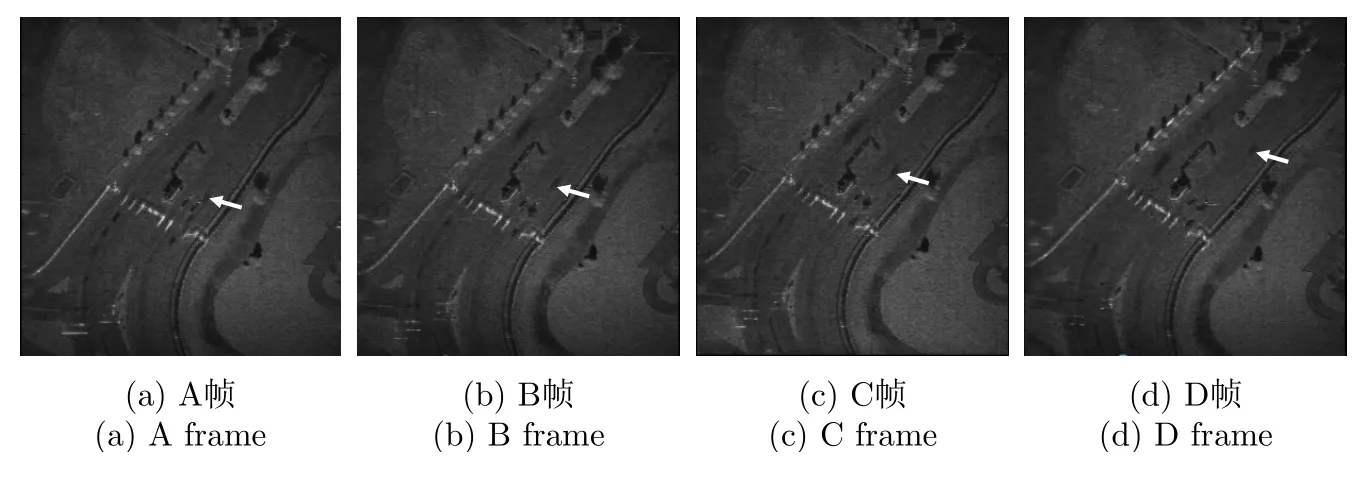
图6 圣地亚国家实验室的视频SAR成像结果[19]Fig.6 Video SAR imaging results of Sandia national laboratories[19]
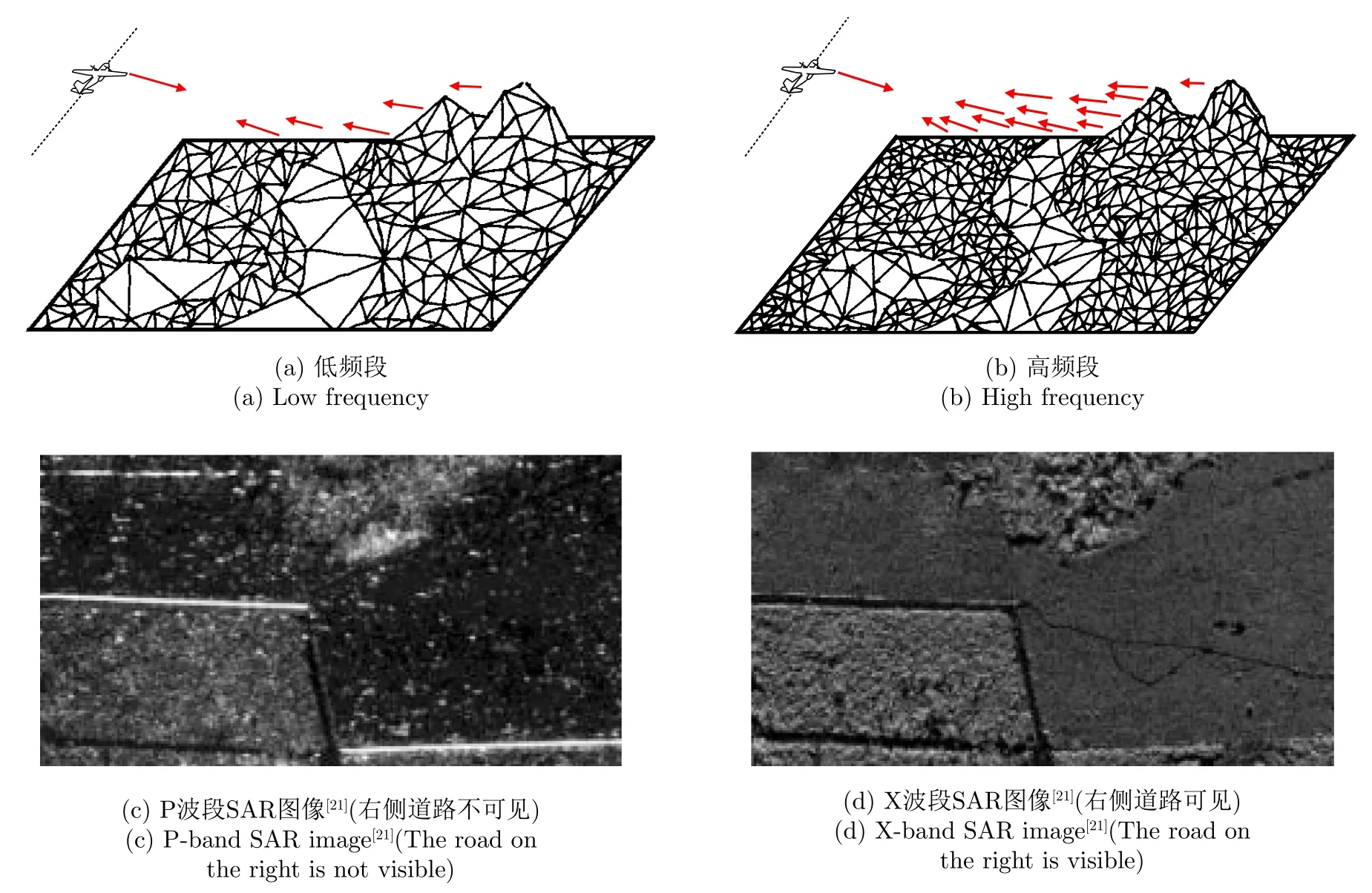
图7 不同频段地物SAR图像差异的直观理解Fig.7 Intuitive understanding of the differences between the SAR images of the ground objects in different frequency bands
双基前视SAR具有重要的应用价值,是合成孔径雷达领域最重要的前沿课题之一,有不少研究单位已开展相应的研究工作[55-58]。例如,电子科技大学在理论、方法和技术研究[53,54,59,60]的基础上,于2012年获得了国际上首幅机载双基前视SAR图像[61],如图24所示,随后还进行了多次双机飞行试验,改进了成像质量[62]。
实际上,如果知道合成孔径雷达技术是在制造微波眼,那么由单色、平面和静态到彩色、立体和动态的演化就是必然的了。而且,在较长时间段内对起伏地表形变及植被生长变化的持续观测中,全极化干涉SAR已经同时具备了彩色、立体和(长时)动态的表征能力,而即将出现的太赫兹全极化干涉SAR也将同时具备彩色、立体和(短时)动态的表征能力。
(2)孔径流形由直线状演化出曲线状和面状,并向多曲线交织的立体状演进。
孔径流形是指雷达收发通道在平台运动过程中所形成的轨迹形态,合成孔径雷达技术发展到现在,已演化出多种不同的孔径流形,这种演化趋势还将持续,如图8所示,其中红色圆点代表承载平台上所有发射通道,蓝色圆点则对应所有接收通道。
不同的孔径流形会明显地改变雷达获取信息的方式,从而使回波规律和成像处理产生大的变化。相对于最初的直线状孔径流形,曲线状孔径流形需要适应平台的机动飞行,却能够形成更大的或二维的观测视角变化,还能够从不同的方向观测地物,从而获得更加丰富的地物信息,例如,曲线SAR和圆周SAR。而面状孔径流形的主要作用是能够获得对地立体成像能力,如层析SAR。而接收通道与发射通道分离运动形成的流形,却可以获得地物的双基散射信息,而不是传统的后向散射信息,例如双基SAR和多基SAR。
圆周SAR通过其环形孔径获得多视角观测能力和高程信息获取能力,后者又有利于起伏地表上地物的回波聚焦,从而改善图像质量。例如,中国科学院电子学研究所获得的圆周SAR图像[23],如图9所示,比条带SAR图像和较小转角的SAR图像包含有更丰富的地物信息,使地物形貌更加完整,如图9(d)所示;甚至能明显观察到条带SAR图像中不易查觉的输电线,如图9(b)中箭头所指。
圆周SAR利于在等照射强度的条件下获得大的观测视角变化,不仅能够获得更高分辨率的SAR图像,还能够将不同观测视角所得图像进行融合,增强地物的可辨识性。例如,国防科技大学获得的圆周SAR多视角融合图像中[24],十字路口四角各类地物的可见性、清晰度和轮廓完整性,都明显优于普通条带SAR,如图10所示。
曲线SAR的目的,是要实现平台机动时的对地成像。复杂的机动飞行方式能够获取地物的多视角图像,从而增强雷达对地物的辨识能力,甚至可以使运动的雷达形成类似蝙蝠机动飞行时的环境三维实时感知能力,如图11所示。这是因为,从成像的物理学原理上看,只要在机动过程中能够产生足够的观测视角变化,就能够获得相应的分辨能力。当然,要在实际应用中做到这一点,还需要有强大的飞行控制能力、足够的测姿定位系统(Position and Orientation System,POS)设备精度、敏捷精准的波束指向控制能力、与飞行方式相适应的空间采样技术和高精度的实时处理能力作为支撑。

图8 孔径流形的演变3图8中的层析SAR是指多航过层析SAR。Fig.8 Evolution of the aperture manifold

图9 圆周SAR与条带SAR成像结果对比[23]Fig.9 Comparison of imaging results of circular SAR and stripmap SAR[23]

图10 圆周SAR试验情况[24]Fig.10 Experiment of circular SAR[24]
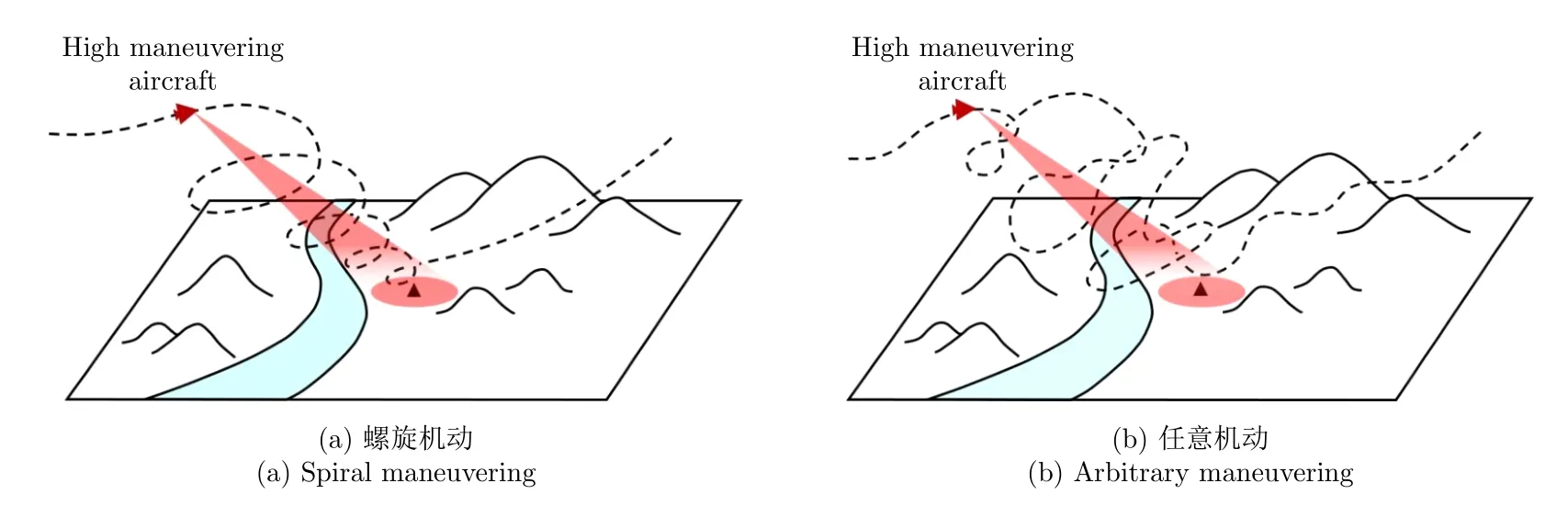
图11 复杂机动轨迹SAR的示意图Fig.11 Schematic diagrams of complex maneuvering SAR
多航过层析SAR属于面状孔径流形,如图8(e)所示。它利用多次飞行所得的复图像进行相干处理,能够形成高程方向的分辨能力,从而获得目标场景的立体图像。例如,德国DLR利用层析SAR原理,实现了建筑群的三维成像[25],如图12所示。其中的高程分辨采用了压缩感知处理方法,来解决层析向多航迹稀疏性对高程分辨的不利影响。
不同的孔径流形可以引入更大和更多样的观测视角变化,从而获得更高维度的信息,或新的成像能力,可以用于解决不同应用场景的特殊问题。因此,对新的孔径流形的探索从未停止,未来很可能向复杂多轨迹交织的立体时变流形演进,以期获得更灵活和更强的对地成像能力,如图8(h)所示。
(3)信号通道从最初的单通道向多通道演化,通道构型由线状向交叉线状和曲面状拓展。
广义的多通道雷达成像技术,也包含利用多路T/R组件来构建电扫天线的技术,例如,数字阵列SAR[26,27]和MIMO-SAR[28]等。这类技术可用来增强成像雷达天线的波束主副瓣赋形能力[29],或波束指向稳定和精准控制能力,从而使成像雷达具备多任务、多功能、低截获和抗干扰等能力。
2015年,中国科学院电子学研究所利用构建的阵列SAR系统,采用下斜视工作方式,利用水平阵列的切视向投影孔径和超分辨技术,实现连续地表稀疏折线约束下的高程超分辨,获得了地面建筑群的立体图像[25],如图15所示。这种立体成像方式,也可以认为是单航过层析SAR,其关键是采用高程超分辨技术,来解决水平阵列尺寸受限和切视线投影较短造成的实孔径阵列高程分辨率不足的问题,同时也克服了干涉SAR相位解缠在陡变地形出错的问题,所以有时也被称为阵列干涉SAR[44]。
多通道SAR近些年来被应用于对地真三维立体成像[34]。其中,阵列SAR以线阵运动来合成面状孔径,而直接利用回波时延来测量地表高程,并利用信号带宽来实现高程分辨,如图13(c)所示,不需要像InSAR那样进行相位解缠。而且,由于采用下视工作模式,正下方附近区域,也不存在阴影问题。因此,可适用于平台低高度飞行时雷达对陡壁深谷等高起伏地表和城市建筑等陡变地表的立体成像。1996年美国阿拉巴马大学首先提出了这种方案[35]。2004年和2005年,法国航空航天研究院(ONEAR)和德国应用科学研究院(FGAN-FHR)也采用了这种方案[36]。国内,电子科技大学[37-39]、国防科技大学[40-42]和中国科学院电子学研究所[25,43,44]等单位也在阵列SAR方面开展了研究和验证工作。其中,电子科技大学于2009年获得了立体分布地物的真三维成像[38],如图14所示。
狭义的多通道雷达成像技术是指,能够利用多个发射或接收通道,来获取同一个地域的回波信号,从而获取更加丰富的地表散射信息。多通道的重要作用和价值在于,由于新增通道向着沿航迹、垂直切航迹和水平切航迹方向延伸,对地成像雷达由最初的单通道SAR分别演化出了合成孔径雷达-地面动目标指示(Synthetic Aperture Radar-Ground Moving Target Indication,SARGMTI)[30]、干涉SAR[15]和阵列SAR[31],从而获得了前所未有的成像动目标检测、起伏地表立体成像和地表及上方立体成像能力,如图13所示。此外,沿航迹多通道技术也可用于解决高分宽幅成像时,重频约束造成的沿航迹空间欠采样等问题[32,33]。

图12 多航过层析SARFig.12 Multi-pass tomographic SAR

图13 单平台多通道SAR示意图Fig.13 Diagrams of single platform multi-channel SAR
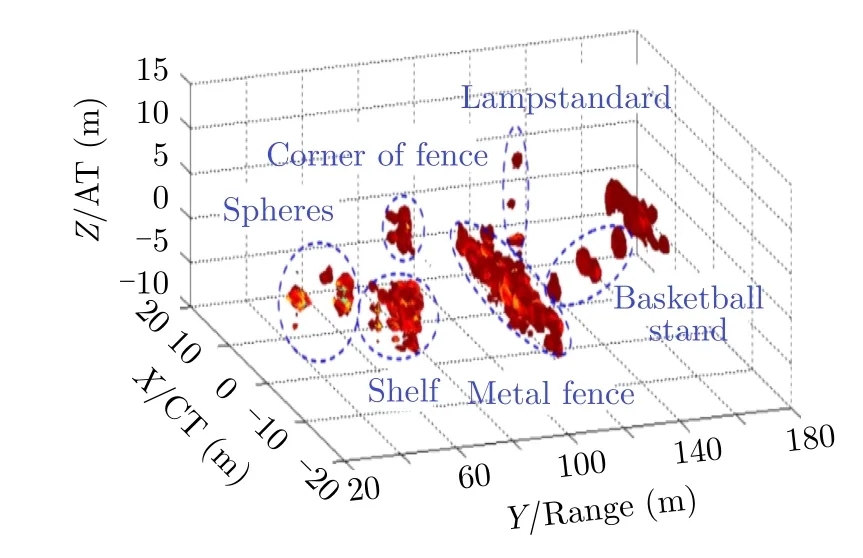
图14 立体分布地物的三维成像[38]Fig.14 Three-dimensional imaging of stereo distributed ground objects[38]

图15 建筑群的三维成像[25]Fig.15 Three-dimensional imaging of buildings
从事物由低级向高级发展的普遍规律来看,可以预期,随着机会阵及传感器飞机等技术的发展和应用需求的牵引,多通道SAR的通道构型,还有可能向类似如图16所示的“钉形”(Nail-like)和“共形”(Conformal)构型等方向发展,从而获得同时多向观测、地表立体成像和动目标检测成像能力。
合成孔径雷达成像过程中的特殊空时关系和散射机理,不仅会造成物虚影实、树浊影清、影好像差、镜面效应和墙角反射(角反射器效应)等现象,而且还会造成明显的近距压缩、高塔近倒(或称顶底倒置或叠掩)、阴影远伸、塔顶散焦等特殊现象[22]。这是熟悉SAR图像的人们习以为常而见惯不惊的事。但一些研究者,却令人意想不到地正在利用这些特殊现象与成像过程的定量空间关系,构建方法和软件,将平面图像中跌倒的地物搀扶起来,形成立体图像,从而在一定程度上恢复陡变地表的三维形貌,并称其为“微波视觉技术”[25]。
开发商成本:开发商建设被动房额外支付的成本为A3。下面是使用MATLAB仿真得出的图4,图像的纵轴是开发商建设普通房的概率,横轴是推广时间,因此曲线反映了概率水平随着推广过程进行产生的变化。
雷达对地成像技术虽然已经历了六十多年的发展,但受到新的需求牵引和相关技术进步的推动,在它的实现机理、系统形态、技术体制、处理方法、成像效果乃至信息提取等方面,依然在发生着深刻的变化,呈现出生机勃勃和纷繁复杂的演化态势。只有立足于信息获取与表征的宏观视角,才能够分析归纳出其发展脉络和勾勒出清晰的演化图景。以下将从8个方面剖析雷达对地成像技术的不同演化形态,并推演和预测未来发展方向。
(4)系统形态由最初的收发同站的单基形态,演化出了收发分置的双多基形态,还将向复杂多点柔性结构的群多基形态演进。
单基SAR具有收发同站的单点状系统形态,如图8(a)-图8(e)所示。而双多基SAR却具有收发分置的多点状系统形态,如图8(f)-图8(h)及图17所示,所以,允许接收站利用其它平台的辐射源作为发射站,来实现对地成像。这些辐射源可以是合作的,也可以是非合作的,而且,一个辐射源的地物散射可以被多个接收站利用,如图17(a)所示。
在双多基SAR中,必须采取收发通信联络和共享航姿信息等技术措施,以便解决好时、频、空同步问题,达到时基统一、收发相参、同景共视的要求[22,45,46],才能够使发射站和接收站能够步调一致、协同工作,达到虽分犹合、浑然一体的效能[22]。也需要针对不同空间构型特有的回波规律,构建保精度高效成像算法,还需要解决好双平台分离运动所致复杂运动误差补偿难题,才能够实现双基SAR对地实时成像。
从表5中可以发现,第一,被解释变量滞后项的系数rho反映了地理因素对农业绿色发展的影响,其取值为0.3768,且在1%的显著性水平下通过了检验,这表明我国农业绿色发展存在空间溢出效应与空间依赖性,地理因素对我国农业绿色发展有着显著的正向作用,即相邻区域农业绿色发展变动会引起本区域农业绿色发展相应变动。事实上,相邻区域有着相似的农业环境,有利于各区域农业绿色发展的相互借鉴学习,最终形成相邻区域农业绿色发展的趋同。
2.1 气候因素 1998年至今,几乎每年梨树花期都会遭受倒春寒影响,其中1999—2005年连续7年梨园减产八成以上。虽然积极采取了在梨园迎风面设挡风墙、堆集柴草熏烟、放置烟雾发生器、梨树喷布防冻液、主干涂白、梨园浇水等措施,但面对大幅度降温天气功效甚微,梨园收益大幅下降甚至入不敷出,极大挫伤了广大梨农的积极性。
双多基SAR的实现难度明显大于单基SAR,但双多基SAR的优点也是明显的。收发分置的空间关系,利于获得不同于单基SAR的地物散射信息[47],如图18所示。在双基SAR中,角反射器不再是强反射体,而那些较强的反射,主要来自于法线指向收发等效相位中心[22]的平面状地物,即图7中的“小镜面”。而且,如图17(b)所示,多基SAR融合图像将有利于描绘多面体人造目标的形貌特征,弥补单基SAR在这方面的致命短板。此外,双多基SAR还可以利用已有辐射源作为发射站,要么让接收站省减发射机,以减少接收站的资源开销,要么让接收站关闭发射机,在保持无线电静默的同时实现对地成像。因此,双多基SAR的接收站可以具备成本较低、适装性强、安全性高、隐蔽性强和干扰难度大等优点。

图16 多通道SAR演进图4图16中层析SAR指单航过层析SAR,例如图15所对应的成像方式。Fig.16 Multi-channel SAR evolution map
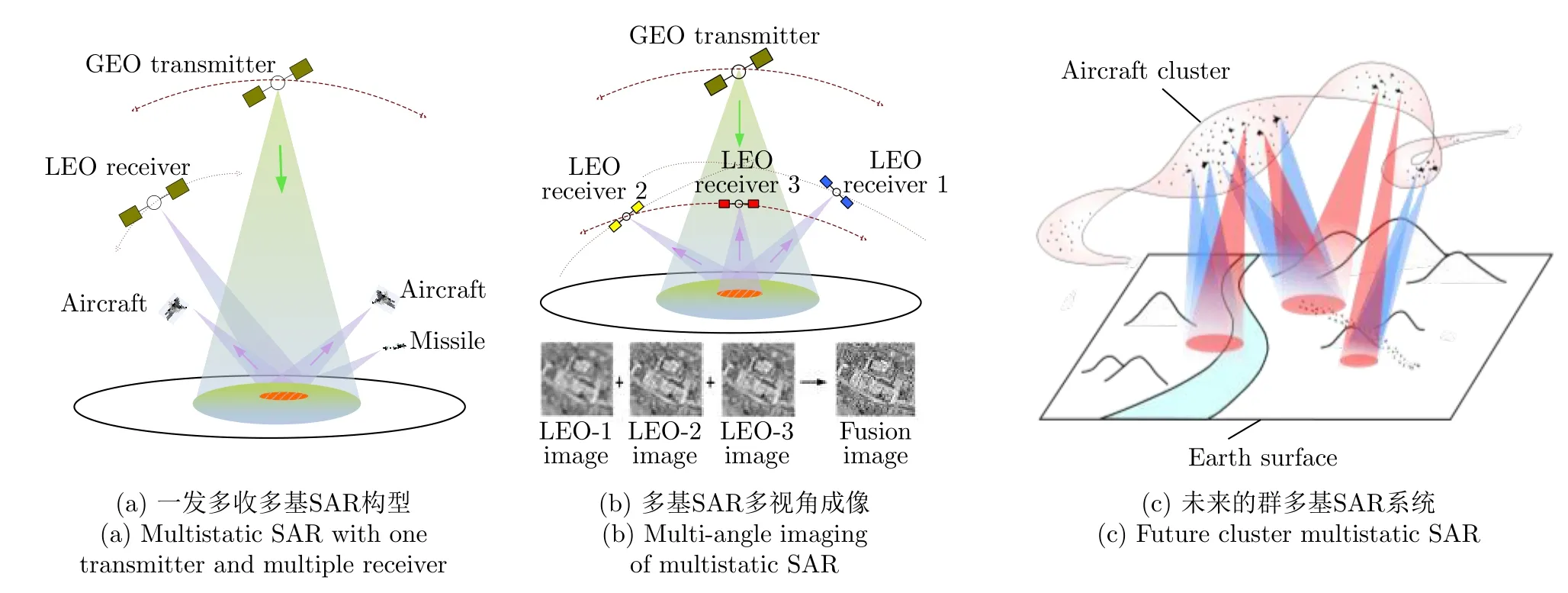
图17 双多基地SAR系统形态Fig.17 Morphology of Bistatic/Multistatic SAR

图18 单双基SAR图像明暗关系差异[47]Fig.18 Difference in light-dark relationship between monostatic and bistatic SAR images[47]
从成像机理上看,无论是单基SAR,还是双基SAR,除了观测区相对于收发站所处的方向和位置因素外,它们的时延地距分辨率主要取决于发射信号带宽,而多普勒地距分辨率主要取决于工作波长及收发站相对于目标的视角变化之和。不同之处在于,双基SAR的空间构型关系及其时变性对成像分辨率有着重要的影响,而空间构型设计的基本原则之一就是,站在目标的视角看,发射站或接收站必须是在移动的,并产生足够的视角变化。
已有多个国家的研究机构成功地完成了双基SAR的试验验证。例如,2002年9月,英国QinetiQ公司进行的机载聚束式双基SAR试验[48],验证了收发站间的时、频、空同步技术,如图19所示。
2003年11月,德国应用科学研究院(FGAN-FHR)进行了非时变构型的机载双基SAR飞行试验[49],并结合运动补偿,用距离多普勒(Range Doppler,RD)和后向投影(Back Projection,BP)算法验证了双基侧视SAR成像的可行性,如图20所示。2007年12月,德国宇航中心(DLR)采用F-SAR作为机载接收站,TerraSAR-X卫星作为发射平台,完成了载机顺轨飞行时的星机侧视SAR成像试验,如图21所示[50]。
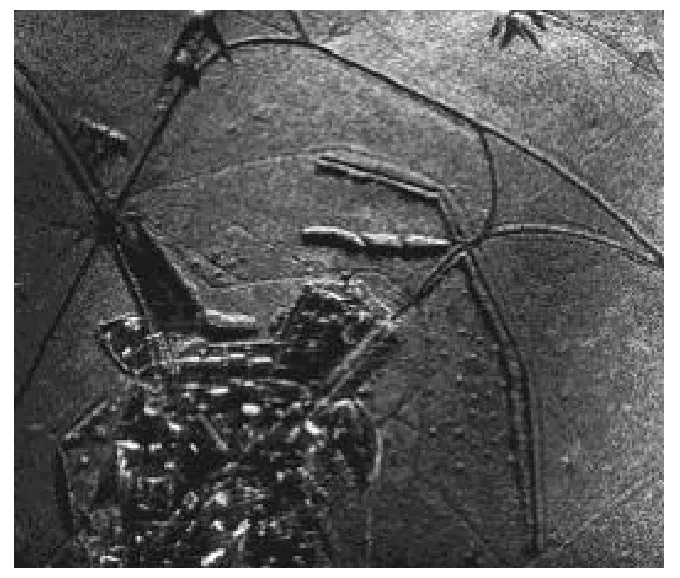
图19 聚束式双基SAR试验[48]Fig.19 Experiment of spotlight bistatic SAR[48]
2004年起,电子科技大学开始了机载双基SAR的理论、方法和实现技术研究,以及试验样机的研制工作,并于2007年12月进行了时变和非时变构型的机载双基SAR飞行成像试验,获得了国内第一幅双基侧视SAR图像[51],如图22所示,并验证了时、频、空同步及时频非同步条件下机载双基侧视SAR成像的可行性。
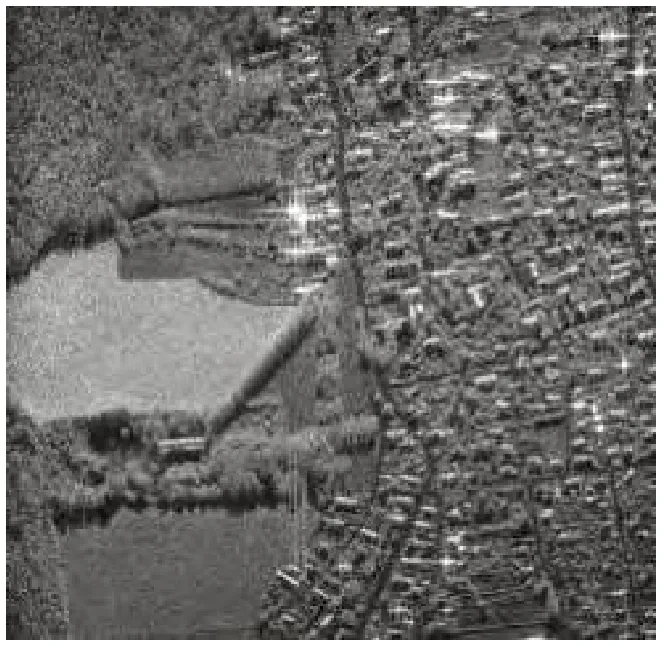
图20 机载双基侧视SAR试验[49]Fig.20 Experiment of airborne bistatic side-looking SAR[49]
进一步来说,入射波空变强度分布其实就是一种观测调制。所以,调控入射波空变强度分布的实质就是变换观测调制。因此,合成孔径技术就是利用运动所致观测视角变化,来实现时变的观测调制,而实孔径超分辨技术则是利用电磁辐射操控,来实现时变的观测调制。所以,视线横向分辨机理更深层次的物理本质,是时变空变的入射波强度分布,即时变的观测调制。
随着飞行器、测姿定位、算力算法、智能机群等相关技术的进步,未来对地成像雷达的可能演化形态之一,是多点柔性结构形态、互联互通、分布式相参和任务环境自适应的群多基形态,以便形成更强的多维度信息获取能力,如图17(c)所示。
分别基于林承璋和刘世平提出的英语构词法体系和任学良提出的汉语构词法体系,本研究对选取的英汉新词的构词模式进行了分析和总结(详见表1和表2)。
(5)成像观测方向由传统的侧视、斜视向前视、后视、下视拓展。

图21 星机双基侧视SAR试验[50]Fig.21 Experiment of spaceborne/airborne bistatic side-looking SAR[50]

图22 国内首幅机载双基侧视SAR图像[51]Fig.22 The first airborne bistatic side-looking SAR image in China[51]

图23 外辐射源双基SAR试验[52]Fig.23 Experiment of passive bistatic SAR[52]
单基SAR的发射和接收位于同一个运动平台,导致时延等值线与多普勒等值线在前视区形成接近平行的交越关系,不具备二维分辨能力,因此不能实现前视成像。而双基SAR的发射和接收分置在两个运动平台上,因此,可以通过空间构型关系控制特定观测区内的时延和多普勒等值线的分布及交越关系,从而构成二维分辨能力。所以,双基SAR不仅可以实现接收平台的侧视成像,而且可以实现接收平台的前视、下视和后视成像[22]。
当然,要在实际应用中实现前视、下视或后视成像,还必须解决一些新的问题。例如,在双基前视SAR成像中,回波规律会呈现出显著不同于单基或双基侧视SAR的特点,如距离大徙动、参数强空变和时频紧耦合等[53],导致构建频域成像算法时面临更大的困难;运动误差的来源、影响和补偿也会出现新的特点和问题[54];而且,在接收站的前视区,时延地距分辨与多普勒地距分辨的方向通常是斜交的,所以,分辨率的度量方法将更为复杂[22]。
在更高的频段,会有更多较小尺度的小镜面,如图7(b)所示,即使分辨率与低频段相同,微波眼看到的情形也会得到改善,更加接近光学眼看到的景象,地物也更易辨识,如图7(d)所示。而且,在较低的频段,路上汽车的影子不像图6中那么可见,因为这时候路面是大块的镜面,斜看时并不会反射出那盏矿灯的影像,道路与影子是一样的黑色,没什么差异,自然显不出影子来;而高频段就不一样了,路面成了破碎粗糙的镜面,即使斜看,也可见到那盏矿灯无数克隆的影像,密密麻麻地分布在粗粒铺装的高速公路上[19],也不算稀疏地分布在细粒铺装的高速公路上,所以,路亮影黑,在微波眼特别是太赫兹眼里的物虚影实[22]效应中,就成了追影检测的基础。
潜在生态危害指数法重在评价土壤中重金属对当地土壤潜在的生态危害影响。该方法除考虑当地环境背景值外,更注重某种重金属元素的生物毒性指标,可以定量单一评价某种重金属的潜在危害效应,也可以综合多种重金属来对当地的生态环境效应做综合的定量评价[11-13]。该方法的公式为:
对不同色调和粒径的磷灰石X射线粉晶分析结果见表3,P2O5含量见表4。从表4可以看出仅荧色调不同,但X射线粉晶分析及P2O5含量相近。
德国FGAN-FHR于2009年开展了载机交轨飞行的星机双基后视SAR成像试验[63],采用Terra SAR-X卫星作为发射平台,安装在C-160飞机上的PAMIR雷达为接收站,获得了接收载机的后视SAR图像,如图25所示。
此外,还有一类被称为实孔径超分辨成像的技术,可用于运动平台的前视成像,将在后面介绍和分析。
目前临床多建议应用胺碘酮抗室性心率失常,本研究对照组在常规治疗的基础上加用该药物,4周后已有70.73%能够维持窦性心律,且随着治疗时间的延长,该比例呈上升趋势。有研究提示,胺碘酮对慢性心力衰竭伴心律失常患者有一定应用价值[6-7],但有部分患者疗效仍不理想,提示仍需探寻更可靠的治疗方案。
(6)成像处理方法正由匹配滤波向压缩感知拓展,时域算法的应用范围将会更加广泛。
目前SAR目标识别所采用的监督学习方法:大多依赖于足够多的目标数据和先验信息。虽然,这些年来SAR图像数据资源逐渐丰富,但可移动目标的图像样本却被淹没在海量的图像数据之中,难以被用在SAR目标识别系统知识库中,并起到提高识别能力的积极作用。同时,这类目标的高质量SAR图像样本及其真值就更为稀缺。因此,“大”数据与“小”样本甚至“无”样本的矛盾,是目前SAR目标自动识别技术所面临的最大挑战。这时候,一方面需要采取得力的措施,去提取这些图像样本或针对性地录取这类目标的图像样本,并应用于SAR目标自动识别系统中;另一方面,也必须利用基于光学图像和电磁散射机理的目标图像样本生成方法[104-106],来增加目标图像的仿真样本,作为真实样本的重要补充或填补目标图像样本的空白。只有这样,才能够丰富SAR目标自动识别系统的数据库,充分训练和完善其机制和策略,改善其识别能力。
一般来说,成像算法可以分为两大类:即时域算法和频域算法。
时域算法的典型代表是BP算法[64],首先进行距离压缩处理,然后针对SAR图像中的每个像素点对应的回波进行沿距离徙动轨迹的相干积分,从而实现散射点回波多普勒能量的归位聚焦,算法结构简单,且适用于任意几何构型和扫描模式。虽然,BP算法也发展出不同的变体,但总的来说,逐像素点计算的结构导致它们的运算量仍然太大,不利于在目前工程应用中主流的非并行处理架构的计算设备中去实现实时成像处理。所以,频域算法目前仍然是工程应用中采用的主流算法。

图24 机载双基前视SAR图像[61]Fig.24 Airborne bistatic forward-looking SAR image[61]
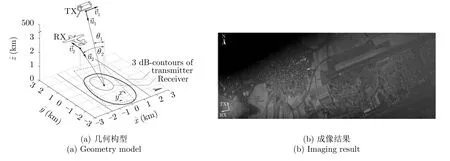
图25 星机双基地后视SAR试验[63]Fig.25 Experiment of spaceborne/airborne bistatic backward-looking SAR[63]
RD,ω-k和调频变标(Chirp Scaling,CS)等频域算法,针对不同的情况,采用了不同的思路,得到了不同的计算流程。不同的频域算法,虽然从形式上看有很大的差异,但从本质上却是一致的。它们都是根据回波模型反映的回波规律,通过对回波数据的异域变换和同域转换等数学处理,实现去空变归集和解耦合降维,并同步补偿处理残差,以便在保精度的条件下,将低效率的二维相关运算过程转化为两类正交和串行的一维正逆傅里叶变换过程,并嵌套使用快速傅里叶变换(Fast Fourier Transform,FFT)和逆快速傅里叶变换(Inverse Fast Fourier Transform,IFFT),实现成批快算,从而达到显著提高计算效率的目的。同时,频域算法的另外一个优点是,可以方便地借用已完成的异域变换操作,嵌入参数估计和运动补偿,而不会增加太多额外的计算资源开销。频域算法的这些特点,使它很适合应用于测姿定位设备精度不足且采用非并行计算设备的合成孔径雷达系统中,去实现实时处理。
虽然BP等时域算法的串行计算效率远低于频域算法,但其逐像素点处理的计算结构特点,却使它很适合在图形处理器(Graphics Processing Unit,GPU)等具有多线程并行处理架构的计算设备中实现实时处理。时域算法需要利用精确的平台运动测量数据,所以,它主要用在具有高精度测姿定位设备和波束指向稳定措施的平台上。由于时域算法具有几何失真小、保相性能好、计算精度高、构型适应能力强等优点,随着波束指向稳定技术、POS等测姿定位技术及GPU等多线程并行计算技术的发展和普及,时域算法或将得到更为广泛的应用,并成为未来工程应用中的主流成像算法。
同时,随着计算设备算力的提升,以及曲面多通道和群多基SAR等技术的发展和牵引,时域算法将由基于平面模型的计算结构最终向基于双向立体模型的逐像素聚焦计算结构方向拓展,以适应多平台相参和起伏陡变地表的立体成像。
容易被忽略的是,二维匹配滤波处理方法从来就没有被证明过是唯一和最佳的成像处理方法。正是基于这一认识,最近若干年发展出了一类新的成像处理方法[65,66],称为压缩感知成像处理方法。其基本思路就是基于数学中的最优化方法,在高信噪比条件下以场景稀疏性等先验信息为约束,通过迭代寻优的计算过程,得到相应场景的雷达图像。甚至在有些情况下,还可以获得优于匹配滤波的分辨率、旁瓣电平或信杂比[67],或降低空间采样率、抑制成像模糊性等[68]。当然,迭代寻优过程运算量较大,为保证成像处理的时效性,也发展出了相应的保精度快速计算方法,例如快速迭代阈值收缩算法(Fast Iterative Shrinkage-Thresholding Algorithm,FISTA)[69]和近似信息传递算法(Approximate Message Passing Algorithms,AMPA)[70]等。压缩感知成像处理方法的有效性已经在研究和试验中,得到国内外多家单位的证实,例如中国科学院电子学研究所2013年的机载飞行试验[71]。目前,压缩感知成像处理方法已用于星载SAR[72]、层析SAR[73]、阵列SAR[74]、ISAR[75,76]的成像处理中。
(7)实现机理由原有的基于观测视角变化的运动平台合成孔径成像向基于观测调制变化的不依赖运动的超分辨成像方向拓展。
合成孔径雷达成像技术,通过真实的较小孔径的天线波束照射观测区,并通过一段时间的平台运动,来合成出虚拟的更大孔径的天线,从而获得超越真实孔径的方位向分辨能力。所以,这种成像机理被称为合成孔径,其实,称它为超分辨成像技术,也未尝不可,只是历史并未这样选择,况且,超分辨这个名词后来又被附加了别的含义。
从物理实质上看,合成孔径成像实现视线横向分辨5这里采用视线横向分辨和视线纵向分辨的表述方式,而未采用方位分辨和距离分辨的表述方式,是为了便于从透镜成像的角度来类比合成孔径成像的原理。的原理,与我们眼睛采用的透镜成像原理是类似的。只不过因为微波的波长远大于可见光,实现视线横向高分辨所需的透镜孔径过大,现有飞行平台难以承载。只好通过平台运动来记录这个并不真实存在的大孔径透镜面上的衍射图,然后通过计算的方式,来实现这个虚拟的大孔径透镜的归位聚焦功能,从而实现视线横向高分辨。同时再结合类似蝙蝠回声测距分辨的原理,以大带宽信号回波脉冲压缩处理完成的往返时延分辨,来实现视线纵向的归位聚焦和高分辨,从而达到二维成像的目的。
通常我们更习惯于单基侧视合成孔径雷达D/2的方位分辨率表述,如图26所示。因为飞行、记录和计算合成了比真实孔径D更大孔径的天线,所以,获得了合成或锐化后D/2r的双程波束宽度和对应的角分辨率,显著超越了真实孔径波束宽度λ/D对应的角分辨率。这种解释更贴近工程师的思维模式,也很容易用他昨天才做好的天线孔径D的一半,来判定雷达成像的方位分辨能力。但物理系的博士,会着急地提醒工程师,方位分辨率取决于这只合成的微波眼对被观测点所形成的张角θ,因为它在物理学上正比于空间谱宽,而方位分辨率等于半个波长λ/2与张角θ之比,更贴近成像的物理本质。这样的解释,让人更容易理解SAR和ISAR为什么会有相同的方位分辨率公式;也更容易明白,一个在你眼里看起来根本没动的运动平台,是不可能用单基合成孔径原理来拍摄你的雷达照的;还更容易理解斜视SAR[77]、大斜视SAR[78,79]和多普勒波束锐化(Doppler Beam Sharpening,DBS)[80]为什么会消耗更多的时间资源和只能获得更低的独立帧率,而高波段SAR或高转角速率运动的平台为什么能够获得更高的独立帧率。
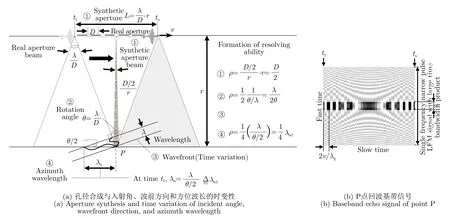
图26 合成孔径原理的4种不同解释6为绘图标识方便,显著放大了波长和转角。例如,3 cm波长,0.3 m分辨,转角仅2.86°;θ在10°以内,sin θ/2≈θ/2,误差小于0.13%。Fig.26 Four different interpretations of synthetic aperture principle
当然,物理系的教授,并不满意这些表面的解释,他们会郑重地申明,在孔径合成的过程中,入射角变化导致的入射电磁波波前方向变化,才是合成孔径能够获得超越真实孔径分辨能力的真正原因。不过,物理系的资深教授,在与同事们聊天的时候,却更愿意提到,入射波会在方位向形成空变的强度分布,其空变周期就是方位波长[81]λa,而正是由于入射角变化导致的入射波方位波长的时变性,或入射波空变强度分布的时变性,才是能够实现方位分辨的深层次物理本质:在合成孔径雷达成像中,方位分辨率其实就取决于初始时刻t1时的方位波长λa1的1/4,也就是说,电磁波就是一把用1/4波长作刻度的尺子,测不测得好,分不分得开,既要看这把尺子刻度的粗细,还要看使用这把尺子的水平,也就是端不端得平;而且,更紧要的是,在这个层次,合成孔径成像技术与实孔径超分辨成像技术的成像机理,分明是简单而统一的。
所谓实孔径超分辨成像技术,是指扫描波束锐化[82]、微波关联成像[83,84]等不依赖于运动和观测视角变化的雷达成像技术。它们通过时变的辐射方向图,来形成时变的入射波空变强度分布,同时记录回波,然后,利用最优化方法,通过迭代寻优的计算过程,综合出虚拟的大孔径天线,从而,获得超越实孔径的角分辨能力,而且还可以用于实现运动平台的前视成像。所以,一个在你眼里看起来根本没动的运动平台,很可能正在利用这类超分辨成像技术拍摄你的雷达照。
扫描波束锐化技术利用天线波束扫描来形成入射波空变强度分布的时变性,与采用机扫和电扫的现有雷达兼容性甚好,是很有实际应用价值的成像技术,且已逐渐成熟并走向应用。例如,电子科技大学对扫描波束锐化进行了多年的理论方法[85-87]和实现技术[88]研究,并用类卷积反演方法,在机载雷达上实现了高倍数的角度超分辨[82],如图27所示,能够将波束宽度内两只交汇的船明显区分开来。而且,在用于扫描测图时,图像的清晰度也得到了明显改善,如图28所示。
电磁涡旋成像技术[89-91]也归属于实孔径超分辨成像技术,但看起来与前两项超分辨成像技术有些不同。它通过发射涡旋电磁波,在观测区形成时变的入射波波前方向和入射波空变强度分布,同时记录回波,并通过目标重构计算来实现成像。近年来,国防科技大学将电磁涡旋应用于雷达成像中[92],研究了电磁涡旋产生与方向图优化[93-95]、电磁涡旋目标散射特性以及目标重构方法[96,97],并通过实验验证了电磁涡旋成像的可行性,如图29所示。
如前文所述,对于合成孔径雷达成像来说,观测区不同时刻的入射波波前方向是变化的,从这个角度看,它与电磁涡旋成像的机理又具有相通性,只不过前者通过平台运动来形成时变的波前方向,而后者通过控制辐射的电磁波来形成时变的波前方向,但它们都会在被观测区形成时变的入射波空变强度分布。
学习动机是教育心理学和学习心理学研究的重要课题之一。在我国,学习动机问题也受到了较多关注,随着校园生活的多样化,大学生学习动机也呈现出多样化发展趋势,其学习状态令人担忧,学习动机缺乏已成为不争的事实。高校奖学金是为鼓励优秀学生而设立的奖励资金,是高校教育管理工作中一项激励学生的重要措施。本课题以石河子大学本科生为研究对象,结合石河子大学奖学金制度以及大学生学习动机设计调查问卷和访谈提纲,组织开展问卷调查及访谈,对调查结果进行统计分析,旨在使奖学金发挥出更大激励作用。
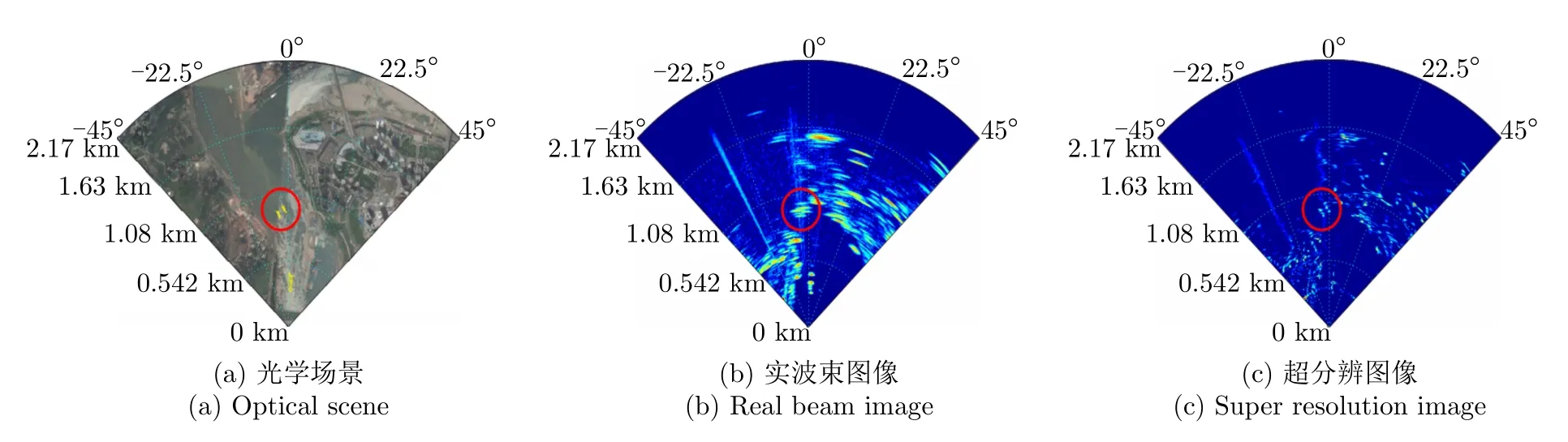
图27 扫描波束锐化技术的交汇船只分辨试验[82]Fig.27 Resolving ships experiment of scanning beam sharpening[82]
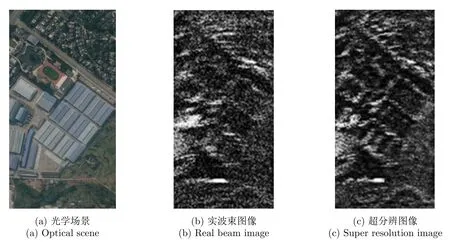
图28 扫描波束锐化技术的面目标成像试验[82]Fig.28 Surface target imaging experiment of scanning beam sharpening[82]

图29 电磁涡旋成像的可行性验证[96]Fig.29 Feasibility verification of electromagnetic vortex imaging[96]
综合看来,合成孔径成像技术,利用平台与目标的相对运动或观测视角变化来对观测区形成时变的入射波空变强度分布,而实孔径超分辨成像技术,利用天线波束的扫描或对辐射电磁场的控制来对观测区形成时变的入射波空变强度分布。所以,这两类成像技术的物理本质是一致的,只不过采用了看起来明显不同的方式来实现。实际上,它们的宏观共性也是明显的:这两者都需要以信息采录的时间为代价,来形成虚拟的大孔径,从而获取超越实孔径的分辨能力。
外辐射源双基SAR是双多基SAR的一种独特的实现方式。2013年10月和11月,瑞典开展了两次VHF波段非合作外辐射源双基SAR成像试验[52],实验对比结果如图23所示。
当然,这两类成像技术的实现方式差异,也导致了它们的诸多不同,包括但不限于先验信息利用、观测矩阵特性、分辨能力改善、误差噪声适应、杂波抑制效果、副瓣抑制需求、算力资源消耗、快速精准计算和电磁辐射操控。
(8)在SAR目标自动识别方面,将会更多地遵循人类视觉认知的规律、机制、方法和策略。
雷达对地成像只是获得了地物的图像,但要理解所获得的图像,实现由“感”到“知”的跨越,还得依靠图像自动解译和识别技术,这相当于需要发展出类似人眼背后的视觉神经系统。SAR图像的地物化学物理参数反演技术已得到很好的发展和应用,但可移动目标的自动识别技术,却依然需要有一个较长的研究和验证过程,才能更好地服务于各类应用。
SAR图像可移动目标的自动识别问题,与人类视觉认知识别有相通之处,也有明显的差异。自然进化和社会实践,成就了人类卓越的视觉认知识别能力,它所形成的规律、机制、方法和策略,是SAR图像目标自动识别所必须遵循的。近几年发展起来的有价值的SAR图像目标自动识别技术大多属于这个范畴。但是,从研究活动的整体来看,对识别各环节的具体方法研究较多,而对规律、机制和策略的研究却较少,这种情形或许应该尽快改变。例如,支撑目标识别能力的特征提取[98,99]、库更新[100]、它源辅助、监控评估、识别判决等机制,如图30所示,更需要努力在SAR图像目标自动识别应用系统中去构建。换言之,在构建针对特定任务需求的SAR目标自动识别系统时,需要植入更加贴近人类视觉认知的规律、机制和策略,使系统能够在使用过程中具备知识积累、经验积累和策略优化[101]的成长识别能力,才能够更好地服务于实际应用。
识别能力的资源关联性问题,也需要得到高度的重视和认真地加以研究,因为我们的雷达和我们提供的知识,可能并没有提供足够的维度和信息,来支撑我们所要求的识别能力。
另一方面,SAR图像目标自动识别与人类视觉认知识别的根本差异,主要表现在成像传感器的高分辨多维度信息获取能力、识别处理依赖的计算结构和能力差异以及对知识的积累掌握和利用能力这三个方面。这些差异,也是制约SAR图像目标自动识别技术进步的障碍和瓶颈。
第一个问题的解决,主要取决于成像雷达在给定平台及成本约束下对频段、极化、视角[102]及时相等资源的集成能力;第二个问题的解决,则高度依赖于计算设备的运算和推理能力[103];第三个问题的解决,除了需要采用类似人类视觉认知识别的机制和策略外,知识的获取和积累是其关键难点。

图30 支撑成长识别能力的主要机制Fig.30 The main mechanisms that support growth recognition
目前合成孔径雷达的主流成像处理方法是二维匹配滤波处理方法,其本质是对噪声中孤立散射点回波的最佳检测和估计。直接进行二维匹配滤波运算,是一个逐像素二维计算过程,计算效率低、资源消耗大,难以满足实际应用的时效性要求。所以,必须研究这种成像处理方法的保精度高效率计算方法,通常称之为成像算法[22]。
万物生长。一切都还给了自然,柳树、柿树、竹林、杉树茂密,树间爬满了藤蔓,有成群的麻雀飞过,还有几只羽色艳丽的小太平鸟在高枝亮着嗓子,一只雄鸟明显在求爱,正舒展开漂亮大尾和凤冠在枝头来回跳舞。
3 雷达对地成像技术发展的内外因素与基本规律
从宏观的视角和大的时间尺度来看,目标、环境和任务等外因与方式、能力和资源等内因这6个主要因素的相互作用,是雷达对地成像技术发展的根本动因[4]。
(1)目标、环境和任务,是促成雷达对地成像技术发展的三个主要外部因素。
应用需求是推动技术发展演化的动力。在众多而复杂的各种因素中,可以清晰地看到,目标、环境和任务,是促成对地成像雷达系统形态、体制、频段和技术不断发展演变的三个主要外部因素,如图31所示。其中,对成像雷达技术发展推动作用最大的是任务多元化,其次是环境复杂化和目标多样化。
任务多元化是指对地成像雷达的使命任务出现多向分化和范围扩展的趋势,以满足多种不同的应用需求。例如,除了需要获取平坦地表的单色、平面和静态图像以外,还需要获取陡变地表的彩色、立体和动态图像;除了需要实现侧视和斜视成像以外,还需要实现前视、下视和后视成像。这些新的任务对成像的维度、粒度、时效、精度和效用甚至雷达的形态都会提出不同的或更高的要求。
目标多样化是指对地成像雷达需要关注的地物种类属性、尺度大小、运动特性、散射特性、极化特性、频谱特性等呈现逐渐多样化的趋势。例如,地物的种类由最初的地面静止场景和目标扩展为运动目标,而目标的特征由常规扩展为隐形、隐蔽、遮蔽、变体和时敏。而对不同类型目标的成像又对观测的频段、极化、视角、时相甚至雷达形态提出了不同的要求。
环境复杂化是指对地成像雷达的工作环境、生存环境和电磁环境,以及目标的周边环境变得更加复杂和恶劣。例如,除了需要承载于平直运动的平台上,还需要承载于曲线机动的运动平台上,除了对平坦无遮挡地表上的目标进行成像外,还需要对山川、建筑、树林环境中的目标进行成像;除了能够工作于清洁的电磁环境,还需要能够适应复杂的电磁干扰环境。
(2)方式、能力和资源是雷达对地成像技术发展演变的三个主要内部动因。
仔细地梳理雷达对地成像技术的多种内在因素之后,可以看到,方式、能力和资源是雷达形态、体制、频段、理论和技术不断发展和演变的三个主要内部因素,如图32所示。其中,对雷达成像技术创新最具推动作用的是方式,其次是能力和资源。
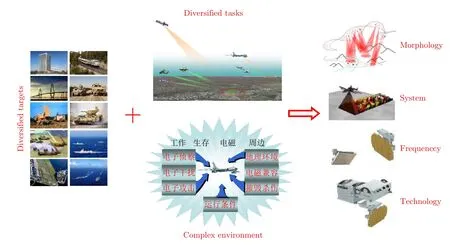
图31 雷达对地成像技术发展的外部因素Fig.31 External influencing factors for the development of radar ground imaging technology
方式是指对地成像雷达获取信息的方式。信息获取方式的变化,使得成像的机理、系统的形态、处理的方法、系统的构成、运动的方式等诸多方面产生变化,从而使对地成像雷达具备更高的性能和前所未有的能力。例如,获取信息的方式由依赖视角变化的方式向不依赖视角变化的方式转变,催生出了扫描波束锐化和电磁涡旋成像等新的技术体制。而孔径合成方式由直线流形向曲线流形、平面流形甚至立体流形拓展,也会使合成孔径雷达的诸多方面产生明显的变化。
能力是指相关技术进步对雷达得以实现所提供的支撑能力,是对地成像雷达实现新的功能和更高性能的物质基础。例如,承载平台的数量和分布形态,运动的范围、速度和机动能力,雷达系统硬软件的配置和协同能力,信号产生、发射、接收、记录和处理的能力,平台测姿定位精度以及波束指向稳定控制能力,甚至雷达系统数字化、软件化和智能化方面的能力。
资源是指对地成像雷达对平台、波形、频带、极化和先验信息等资源的利用程度。增加资源的种类或数量,可以增强对地成像雷达的多维度成像能力。可以预期,随着相关技术的进步和资源利用成本的降低,将出现更多的新体制和新形态的对地成像雷达。
(3)雷达对地成像技术发展的基本规律
根据以上对雷达对地成像技术主要演化方向和内外动因的分析,可以初步归纳出雷达对地成像技术发展演变的基本规律。
雷达对地成像技术的发展也同其它雷达技术的发展演变一样,遵循着由简单到复杂、由低级到高级的普遍规律[4]。总的来说,其发展规律是沿形态构型、观测调制和归位表征3个主要方向,实现由低维度向高维度的阶梯式演进。
所谓“形态构型”,是指系统形态和通道构型的“维”和“度”,“维”是指单平台上信号通道走向的空间维数和多平台散布的空间维数,而“度”是指各维的延伸范围。“观测调制”是指孔径流形、辐射控制和视线方向所形成的观测调制可实现分辨的“维”和“度”,“维”是指除辐射分辨以外可实现分辨的空间正交方向数目,而“度”是指可实现的各维分辨能力的大小。“归位表征”是指成像处理能够涵盖的“维”和“度”,以及所获得的图像能够表征的“维”和“度”,“维”是指强度、距离、方位、高程、频段、极化、时相、视向的总数目,而“度”是指各维的覆盖范围。

图32 雷达对地成像技术发展的内部因素Fig.32 Internal influencing factors for the development of radar ground imaging technology
其实,要是用定性和通俗的话来讲,所谓“形态构型”就是说的信号通道散布的空间关系和它们构成的空间形状和大小,更直白地说,就是“长啥样”。而且,这还是在一个特定的时刻去观察的情况,是静态的,它是决定地表(翻动过的田地,流淌的河水和耸立的高山等)及附着物(自然生长的植被、人造的建筑桥梁、地上跑动的汽车等)信息采录方式的静态要素。而“观测调制”实际上就是指采录这些信息的动态要素,它要做的事,就是要与静态要素一起,捕获地物的短时变化信息,并对三维时变地表做个网格(分辨单元)划分,画个平面的网格,或者画个立体的网格,还有就是要画多大(分辨率)的网格。而这些网格的划分,其实就是通过“怎么飞”(孔径流形)、“怎么闪”(辐射控制)和“照哪儿”(视线方向)来实现的。至于“归位表征”里面的“归位”,就是要把形态构型和观测调制采录到的已经混在了一起而来源于不同网格中的地物散射信息,重新归集或汇聚到它们出发的网格中去(即归位聚焦或成像),而这“归位”正是成像处理的拿手好戏。至于“表征”,其实就是表现、体现和展示出每个网格对应的地物散射信息。当然,这些信息的表现方式,可以是反映明暗的亮度,也可以是反映色彩的色调和饱和度,这些东西又对应着网格中地物的散射信息,对应着地物散射对频率、极化、方向和时间等要素的敏感性信息;此外,这里还有一个能够展示多长、多宽、多高、多强的问题。
从演变的规律趋势和现实的技术状况来看,雷达对地成像技术目前仍处于其发展历程的中级阶段的初期,并以单平台合成孔径成像技术的演变完善、双多基地合成孔径成像技术的诞生发展、实孔径超分辨成像技术的萌芽兴起为主要标志。而高级阶段将以实孔径超分辨成像技术的演变完善以及群集多基合成孔径成像技术的诞生发展和演变完善为主要特征。雷达对地成像技术发展的节奏取决于应用需求与综合能力的契合,相关技术的革命是雷达对地成像技术阶跃式发展的推动力,新概念和基础理论的突破是对地成像雷达新能力形成的先导,基础技术的变革为对地成像雷达能力提升带来新的机遇[4]。
4 结束语
本文从宏观的视角和大的时间尺度,分析了雷达对地成像技术的8个演变、6个因素、3个方向和1个维度,也提到了破碎起伏镜面反射的亮光、物理系师生各自的理解,还有视觉认知识别的机制。可以这样说,我们所从事的雷达对地成像技术,从最初简单朴素的概念到后来复杂多样的系统,发展和演进,浩浩汤汤,纷繁复杂,却又脉络清晰,井然有序。这其中,从匹配滤波到压缩感知,从倒置叠掩到微波视觉,从实体检测到阴影追踪,从样本训练到成长识别,从灰暗难分到色彩斑斓,从平面图像到立体视频,从平直飞行到曲线机动,从孤点收发到曲面阵列,从独自位移到体状流动,从侧视观测到前视成像,从合成孔径到孔径超分,对于我们终日追逐的信息,无论是提取它的办法还是采录它的方式,都可以让我们察觉到内外因素的互动,感受到规律的作用和走向的必然,体会到创新的渴望、无畏的探索、果敢的开拓、节奏的把控和智慧的光芒,领悟到需要从埋头拉车中去抬头看路,在脚踏实地时去仰望星空,在低头做事之间去登高俯瞰。只有这样,创新才来得更加必然,发展才来得更快更好。
致谢
文中的内容及观点,思索和试笔多年,或受教于同行,或苦思于不眠。只因雷达成像技术发展态势纷繁复杂,演化走向交织而新技术层出不穷,从中理清头绪,着实不易,不免挂一漏万、举三错一,谬失在所难免。而从宏观的层面和大的时间尺度,去审视技术发展的态势,认识纷乱现象背后的本质,理解不同成像技术的内在关联性,理清发展的脉络和节奏,对于帮助新人和推进创新,又是必须和值得去尝试的。若此文能对一些读者有所裨益,或者起到激发思考的稍许作用,也不失构思和撰写之初衷。
特别感谢给予作者帮助的家人、学生、同事、同行、审者和编辑。