多平台合成孔径雷达成像算法综述
2020-01-17邢孟道陈溅来孙光才严棒棒
邢孟道 林 浩 陈溅来 孙光才 严棒棒
①(西安电子科技大学雷达信号处理国家重点实验室 西安 710071)
②(中南大学航空航天学院 长沙 410083)
1 引言
随着合成孔径雷达(Synthetic Aperture Radar,SAR)技术[1,2]的快速发展,SAR搭载平台不再仅仅局限于单一的机载平台[3],逐渐出现了星载SAR[4-6]和弹载SAR[7,8]等不同应用平台,满足了更多的需求。
机载SAR平台凭借强灵活性、高重访频率等优势应用于多个领域,然而机载SAR运行高度较低,受大气湍流以及其它气象因素的影响较大,航线会偏离理想直线轨迹飞行造成运动误差,破坏SAR回波信号的相干性,导致SAR成像出现散焦。因此,基于飞机姿态等测量数据的运动补偿技术以及基于雷达回波数据的自聚焦技术是其研究的核心问题[9-11],运动补偿算法和自聚焦算法的精度决定着其最后成像质量。相比于机载SAR,以星载为平台的SAR系统运行轨道高且运动平台平稳,运动误差可忽略。需要指出的是,受地球曲率影响[12],长时间观测和高轨道的运行造成运行轨迹具有明显的非线性特性,使得传统的斜距模型以及频域算法精度降低甚至失效,给星载SAR成像带来了难度。因此,非线性轨迹的斜距建模与频域/时域成像算法是其研究的核心问题,斜距模型的精度以及算法的先进性是影响成像质量的首要因素。与前两者比较,以导弹为载体的弹载SAR系统具有大机动、提前观测、实时成像等优势。由于其轨道的大机动和大斜视等情况,现有的大部分SAR成像算法难以满足高精度和高实时性的需求,所以针对该平台运动特性以及实际需求,归纳总结其成像主要存在斜距建模、大斜视成像、曲线轨迹成像、几何形变校正等几个关键难点问题。如何根据其运动特性建立高精度斜距模型并以此研究相应的成像算法是其核心研究方向。
综上所述,多种平台具有各自的运动特性,其成像算法面临的核心问题有所差异。因此,本文针对多平台SAR成像算法,首先简要介绍了雷达回波模型的建立,然后根据“机载、星载、弹载”3种SAR平台的不同特点以及优势,对其各自的成像算法研究进展进行了重点性地阐述,总结了各自算法目前面临的主要难点,最后对未来成像算法发展趋势进行了展望。
2 合成孔径雷达回波模型
2.1 斜距模型
最初的合成孔径雷达搭载在飞机上,且飞机的运动被规划为理想的匀速直线轨迹,即线性轨迹。随着技术与需求的发展,SAR的载体平台延伸到了导弹平台和卫星平台等,即为弹载SAR和星载SAR等。当雷达工作或近似工作于线性轨迹,采用传统的频域成像算法即可实现精确的成像处理,比如距离多普勒域算法(Range-Doppler Algorithms,RDAs)、线频调变标算法(Chirp Scaling Algorithms,CSAs)、距离徙动算法(Range Migration Algorithms,RMA)和频率变标算法(Frequency Scaling Algorithms,FSAs)等。但在很多情形下,雷达平台不可能完全工作在理想的线性轨迹,即非线性轨迹,原因包括非主动因素和主动因素[13]。
图1为典型线性轨迹几何模型,其中雷达沿着X方向以速度v飞行,r为场景中心距离,φ为斜视角,波束指向中心的运动参数为vtm,xn为目标点p横向分布位置。该模型将3维斜距模型投影成了2维模型,更简易直观。

图1 典型线性轨迹几何模型Fig.1 Geometric model of typical linear trajectory
理想情况下的机载SAR以及低轨道短时间观测的星载SAR系统的飞行轨迹是线性轨迹,可用典型的双曲线函数精确描述其斜距模型,如式(1)所示

实际情况中机载/星载SAR的飞行轨迹可能是非线性的。针对机载SAR的非线性轨迹的特性,建立带有误差的斜距模型[13]

其中,Δr(tm)为非线性轨迹导致的误差项。实际运动情况复杂,Δr(tm)一般没有具体的表达式,不利于SAR多普勒运动参数和误差的估计。为了解决问题,文献[14,15]通过分析误差几何模型与多普勒参数的对应关系提出了一种“非空变运动误差补偿模型”,该模型只考虑了非空变误差,没有考虑空变相位误差以及剩余空变包络误差,只能在小测绘带和低分辨下实现对非线性轨迹的精确补偿。随着分辨率和测绘带的提高,Δr(tm)引入的剩余空变包络误差对成像影响越来越大,对此文献[16]提出了一种“距离空变的运动误差补偿模型”,可通过空变误差的校正实现大测绘带高分辨非线性轨迹补偿。然而在超高分辨情形下,Δr(tm)形式会变得更复杂,存在严重的2维耦合空变,此时上述的1维空变斜距误差模型不再适用,对应的运动补偿或自聚焦精度会降低。文献[17]研究一种新的2维空变误差补偿模型,同时考虑非空变运动误差,距离空变运动误差,耦合运动误差以及方位空变运动误差,可实现更高分辨的成像。
针对星载非线性轨迹成像,为了应对实际情况中“停-走-停”模型的失效,文献[18]建立了原始双程斜距模型,该模型理论上绝对准确,但其属于双基构型且不具备显式的数学表达式,不利于后续多普勒参数分析和成像方法的研究。文献[18,19]更进一步地提出了一种中心时间等效的斜距模型,将双基构型等效为严格单基构型,方便了后续的多普勒参数分析,但依然不具备显式表达式,不利于成像方法的研究。为了满足显式数学表达式的需求,文献[20-23]提出了高阶多项式斜距模型,阶数越高,精度越高,为后续成像方法研究奠定了基础,然而相应地也会增加成像处理的难度。上述3个斜距模型均从非线性轨迹的固有特性出发对斜距进行精确建模,对成像几何关系依赖性很大。为了应对未来灵活轨迹情况,文献[24]提出一种基于运动补偿原理的斜距模型,从运动补偿的角度出发,将斜距模型分为线性轨迹情形下的双曲线斜距历程和轨迹偏移引入的误差斜距历程,补偿掉误差斜距历程实现线性轨迹校正。
考虑斜视情况,文献[25]提出一种改进的斜视距离模型(Advanced Hyperbolic RangE model,AHRE),能够更好地描述星载SAR星地相对运动几何,更适合长合成孔径中高轨道SAR信号建模和成像算法。针对任意波段,分辨率和轨道高度的中高轨道SAR信号建模,文献[26]又提出了一种多项式逼近距离模型,其精度更高,普适性更强。对于宽带信号成像时,“走-停-走”模型不再适用,因此针对宽带信号文献[27]提出了一种新的针对宽带的轨迹模型,其对应斜距历程为

其中,xn为点目标横向位置,r为场景中心距离,t和tm分别为快时间和慢时间,φ为斜视角。
针对弹载非线性轨迹,其平台平飞阶段是带大斜视的线性轨迹,文献[28-30]提出了适用平飞阶段的斜视斜距模型以及一种无近似的斜距模型。其俯冲阶段是复杂非线性轨迹,为了后续更深入的研究,文献[31]提出了一种4阶斜距模型,验证了复杂斜距历程展开得到4阶的精确性,但是复杂的斜距表达式限制了高分辨成像算法的应用,如波数域成像算法等。为了简化复杂的斜距模型,文献[32]基于AHRE模型提出了改进的双曲线斜距方程(Modified AHRE,MAHRE),进一步提高了模型的精度。文献[33]提出了一种等效斜视斜距模型(Modified Equivalent Squint Range Model,MESRM)。尽管这些等效模型的应用存在一些适用条件,但是它们的建立为后续高分辨成像算法的应用提供一定的研究基础。
多平台SAR轨迹的非线性使得雷达回波的时域/频域形式变得复杂,不再统一,难以在时域/频域进行相干积累,必须依赖精确的多项式斜距模型,对回波参数进行等效、重构、补偿,将其等效为传统线性轨迹,然后进行后续处理,实现成像。
2.2 成像模式
随着SAR天线技术方面的快速发展,特别是有源相控阵天线技术的进步,SAR系统对天线波束指向的控制已从机械控制方式转变为电控制方式,波束指向越来越灵活,实现了多种不同的工作模式。其中较常见的有早期的条带(Stripmap)模式、聚束(Spotlight)模式、扫描(Scan)模式(如图2所示)以及后续的滑动聚束模式(Sliding spotlight)和循序扫描地形观测模式(Terrain Observation by Progressive Scans SAR,TOPS SAR)。
条带SAR可以对地面的一个条带区域进行成像,条带长度取决于雷达移动距离,方位向分辨率由天线方位孔径长度决定;聚束SAR可以对地面某一固定感兴趣区域进行长时间观测,增加了合成孔径时间,从而突破方位向分辨率受天线孔径尺寸约束的限制,实现对场景的高分辨成像,但是其成像场景较小;Scan SAR通过控制天线波束在距离向周期性地扫描,可对大测绘带场景成像,成像幅宽较大,但是宽测绘带的获取是以牺牲方位向分辨率为代价的。

图2 Stripmap,Spotlight和Scan SAR工作几何Fig.2 Working geometry of Stripmap,Spotlight and Scan SAR

图3 滑动聚束及TOPS SAR工作几何Fig.3 Working geometry of Sliding Spotlight and TOPS SAR
滑动聚束SAR和TOPS SAR的观测几何如图3所示。类似于聚束模式,滑动聚束SAR的天线波束也随平台运动而反向转动,但其波束射线并不指向场景中心的固定点,而是指向场景远处的某一点,使波束较慢地扫过所需的成像区域,从而在增加对单点目标观测时间的同时,也增加了观测场景的宽度。滑动聚束SAR的方位向分辨率要高于相同尺寸天线的条带SAR的分辨率,而观测场景又比聚束式SAR大,这种模式是条带SAR和聚束SAR之间的折中。TOPS SAR可以说是Scan SAR的改进模式,它在数据录取过程中,通过天线波束主动地从后往前扫描,使地面上的每一个点目标均被完整的天线方向图照射,因此,TOPS SAR在保持Scan SAR宽测绘带成像能力的同时,有效缓解了Scan SAR模式下图像的扇贝效应以及方位模糊比和输出信噪比不一致的问题。
上述模式都已发展成较为成熟的成像模式,近年来为了满足高分宽幅需求,3种新体制成像模式被提出:(1)多通道SAR模式[34]包括距离向多波束(Multiple Elevation Beam,MEB)和方位向多波束(Multiple Azimuth Beam,MAB);(2)马赛克(Mosaic)SAR[35],其实质是一种扫描模式的聚束方式,结合了Scan模式和聚束模式的特点[36],可实现高分宽幅的目的;(3)可变PRF SAR,利用DBF[37]技术在距离向增加接收通道的方法增大观测范围,利用变PRF的方法来消除成像区域内的盲区,达到高分宽幅目的。
3 机载合成孔径雷达成像
机载合成孔径雷达将雷达搭载在飞机上,飞行高度通常在数百米到数千米之间,位于大气层的对流层,大气湍流现象较为明显。因此,机载SAR成像主要面临的问题是大气湍流对成像精度的影响,即运动误差对成像精度的影响。目前针对机载合成孔径雷达成像算法的研究,主要集中在以下几个研究热点和方向。
3.1 运动补偿算法
前文提到,大气扰动等影响会使得飞机的运动偏离理想的直线轨迹,导致雷达回波存在运动误差。利用惯性导航系统(Inertial Navigation System,INS)或全球定位系统(Global Position System,GPS)实时记录的平台位置和运动信息,理论上能够计算出飞机的运动误差并实现精确的运动补偿。然而在大部分情形下,无人机只能搭载小体积轻便的低精度INS,甚至无法搭载INS,将无法满足高精度运动补偿的需求。基于雷达回波数据的运动补偿方法无需INS和GPS数据,通过从雷达回波中估计运动误差并完成运动补偿[9,14],由于通过从雷达回波数据中估计误差,该类运动补偿方法通常被称为自聚焦方法。综上所述,无论是基于惯导数据的运动补偿方法,还是基于雷达回波数据的自聚焦方法,如何获得运动误差是机载高分辨成像的核心问题。图4为运动补偿前后的成像结果,结果表明运动补偿能够大幅度提升机载SAR的成像质量。
下面将集中讨论基于雷达回波数据的运动误差估计以及运动补偿方法。根据对运动误差的建模是否具有解析形式,运动误差估计方法一般分为参数化和非参数化两类方法[9,38]。参数化方法采用多项式相位模型将运动误差建模成高阶多项式的形式,比如对比度最优自聚焦(Contrast Optimization Algorithm,COA)[39],图像偏移算法(Map Drift Algorithm,MDA)[9]等。非参数化方法无需对运动误差进行解析建模,主要包括相位梯度自聚焦(Phase Gradient Autofocus,PGA)[11,40]和最小熵自聚焦(Minimum Entropy Autofocus,MEA)[41]等方法。MDA和PGA分别为上述两类方法中应用最为广泛的算法,并基于它们衍生出了大量的改进算法。其中,MDA的基本原理是将方位全孔径数据划分为多个子孔径数据,并根据子图像之间的偏移估计相位误差。PGA的基本原理是采用各类估计器比如最大似然(Maximum Likelihood,ML)来估计相位误差,并通过迭代估计与补偿的策略逐步地减少相位误差。应当指出的是,MDA通过多项式建模一般只能估计低阶相位误差,在实际的数据处理过程中可能无法满足精度要求。另外,虽然PGA在理论上能够精确估计相位误差,然而在低信杂比(Signal-to-Clutter Ratio,SCR)情形下的精度较低。因此,PGA通常能够成功应用于具有强散射点雷达回波的运动误差估计。综上所述,PGA相比于MDA的误差估计精度更高,然而在低信杂比情形下的误差估计精度可能会大幅下降[42]。

图4 X波段1 m分辨率机载运动补偿前后成像结果图Fig.4 1 m resolution imaging results of airborne SAR before and after motion compensation in X band
在低分辨小测绘带情况下,2维耦合空变运动误差可以近似建模成1维非空变的数学形式[11,40],即对雷达照射场景中的每一个目标而言,它们的运动误差形式完全一致,采用统一的误差补偿函数即可实现对整个场景的运动补偿。
随着分辨率的提高以及测绘带的扩大等,运动误差的距离空变特性将会变得更为明显,运动误差的非空变近似建模不再成立。文献[9]提出了一种基于多普勒调频率估计(采用MDA)的自聚焦方法,该方法将距离全孔径划分为多个距离子块,通过估计距离空变的多普勒调频率来估计距离空变的运动误差。由于该方法沿用了MDA进行运动误差估计的思路,无法精确估计载机的高频运动误差,且为实现较高的精度需要进行多次迭代估计与补偿。因此,文献[14]提出了一种基于PGA的无人机载SAR自聚焦方法,该方法对RCMC后的全孔径数据在距离向进行分块处理,利用PGA对每个距离块进行相位误差估计,最后采用局部最大似然(Local Maximum-Likelihood,LML)估计提高距离空变误差估计的精度和稳健性。文献[17,43]推导了超高分辨情况下运动误差的2维空变复杂形式,并重点分析了其对方位散焦、剩余距离徙动(Residual Range Cell Migration,RRCM)、距离散焦的影响。其中文献[43]指出了高精度的徙动校正算法(如RMA和PFA)会破坏方位相位误差(Azimuth Phase Error,APE)和剩余距离徙动线性关系,并进一步推导了APE和剩余RCM之间的映射关系,根据估计得到的APE计算出剩余RCM,完成对APE和剩余RCM的精确补偿。文献[17]更深入的考虑了距离散焦对成像的影响,该方法在方位频域估计1维APE并根据先验信息计算得到波束域的2维相位误差,最后在波束域补偿2维相位误差,有效克服了距离散焦对成像的影响。
进一步,随着雷达方位波束宽度的增大,不仅需要考虑运动误差的距离空变特性,还需要考虑运动误差在宽波束下的方位空变特性。若该方位空变特性不被消除,SAR图像中位于方位边缘的目标会出现散焦现象,严重降低了SAR图像质量。目前主要有3类算法能够较好地补偿方位空变的运动误差[44],包括精确地形和孔径依赖算法(Precise Topography-and Aperture-dependent,PTA)、子孔径地形和孔径依赖算法(SubAperture Topographyand Aperture-dependent,SATA)和多普勒频谱分割法(Frequency Division,FD)。第1类算法是最接近理想情况的一种算法,能够实现精确的误差补偿,但是计算量较大。第2类算法能够较好地兼顾计算效率和补偿精度,适用范围广。第3类算法在补偿精度要求较高的情形下,计算量较大。文献[45]在SATA的基础上提出了一种改进的子孔径方位空变误差补偿方法,进一步提高了方位空变误差补偿的精度。该方法对子孔径内的运动误差进行线性近似逼近,相比于SATA的常数近似逼近而言,其精度更高。需要指出的是,以上宽波束运动补偿方法均需要INS/GPS提供高精度的测量数据,目前的研究文献还没有公开报道过关于从雷达回波中估计方位空变运动误差的方法。另外,以上算法均基于正侧视工作模式这一假设,在斜视或者大斜视工作模式下都将失效,根本原因在于其中的RCMC算法将无法对斜视或大斜视数据进行精确的距离徙动校正。
一般而言,RCMC是运动误差估计的前提,而上述算法中的RCMC通常采用的是频域算法,即上述算法中的RCMC通常在距离-多普勒域或2维频域完成。除此之外,结合时域RCMC的运动误差估计与补偿也是另外一个切实可行的解决途径。时域算法中的后向投影(Back Projection,BP)算法[46]被认为是实现RCMC最理想的算法。然而传统的自聚焦方法与BP是不兼容的,对此众多学者对结合BP的自聚焦技术展开了研究,文献[47]提出了一种新的自聚焦方法,将PGA嵌入到BP算法中。Ponce等人对圆周SAR提出了一种结合BP成像的自动对焦技术对残余相位误差进行补偿[48]。文献[49]提出了一种基于最大图像清晰度准则的自聚焦方法,利用图像清晰度准则即最大图像锐度来估计相位误差。除此之外,计算效率低也是BP面临的主要问题之一,因此,目前通常结合快速分级后向投影(Fast Factorized BP,FFBP)算法实现对机载SAR的运动误差估计与补偿[50-53],其运算复杂度基本接近频域算法。
3.2 超高分辨率成像算法
SAR分辨率优于0.1 m一般被认为是超高分辨率SAR,其发射信号的带宽通常需要达到3~4 GHz,而据目前公开的文献报道,单个子带能发射的最大带宽为1.5 GHz且对硬件水平的要求较高。因此,目前的超高分辨率SAR通常采用步进频的工作模式,通过发射多个具有不同中心频率的窄带子脉冲信号,并对多个窄带回波信号进行带宽合成,得到宽带信号[54]。图5给出了带宽合成前后的成像图,对比可以看出带宽合成后的图像的局部细节更为丰富,带宽合成前无法通过肉眼看到铁路电线,而带宽合成后的图像可以肉眼清晰地看到铁路电线。步进频信号的发射方式一般分为同步收发和异步收发两种模式,其中同步收发模式利用多个通道在同一时刻发射多个子带信号,而异步收发模式是通过一个通道在一个脉冲重复周期内分时发射多个子带信号[55]。另外,根据相邻子带的频谱是否存在重叠可分为频谱重叠[56]和频谱不重叠两种模式[57],实际发射的多子带信号之间通常会存在着幅度和相位的差异。若直接对多子带信号进行频带拼接,可能会严重降低频带合成的质量,主要表现为距离剖面的主瓣展宽和旁瓣拉升。文献[56,57]将相邻子带之间的相位差异归结为由两类误差组成,第1类误差为子带内的高阶相位误差,而第2类误差为相邻子带间的低阶相位误差。文献[56]采用基于图像对比度最优的方法分别估计出了子带内的高阶相位误差以及子带间的低阶相位误差。文献[57]同样采用图像对比度最优的方法估计子带内的高阶相位误差,而子带间的低阶相位误差通过旁瓣均衡模型(SideLobe Balanced Model,SLBM)估计得到。

图5 带宽合成前后的铁路周围成像图Fig.5 Imaging results around the railway before and after band combination
相比于机载SAR高分辨率成像,超高分辨率成像需要更大的距离发射带宽以及更长的合成孔径时间,使得运动误差对成像的影响会变得更为严重[54],主要表现为首先,运动误差的距离空变特性变得更为严重,不仅相位误差的距离空变特性会进一步恶化,甚至包络误差也会表现为随距离严重空变。其次,即使在窄波束情形下,长合成孔径时间也可能会引入不可忽略的方位空变的相位误差。文献[54]提出了一种超高分辨率2维空变的运动补偿方法,该方法重点论述和证明了当分辨率提升到一定程度时,必须要考虑运动误差带来的距离空变的包络误差,并采用Chirp-Z变换有效校正了距离空变的包络误差,提高了成像分辨率或距离测绘带。图6为采用Two-step运动补偿后[14]的RCMC结果,图6(a)对应的带宽为1.2 GHz,图6(b)对应的带宽为3.6 GHz,对比图中的包络线可以看出,当分辨率不是特别高时比如带宽小于1.2 GHz,距离空变的包络误差可以忽略不计,然而随着分辨率的提升比如带宽达到为3.6 GHz,则必须要考虑距离空变的包络误差对成像的影响。图7为采用文献[54]所提方法进行运动补偿后3.6 GHz带宽的RCMC结果。文献[58]提出了一种联合子带误差估计与宽带误差估计的超高分辨率运动补偿方法,采用单个子带信号对运动误差进行粗估计,利用多子带带宽合成后的宽带信号对运动误差进行精估计。文献[42]通过两步处理提升了超高分辨率和宽测绘带下运动误差估计的精度,该方法的第1步是估计并补偿了RMA额外引入的距离空变的包络误差,提升了PGA的估计精度,第2步是自动判别和剔除PGA估计错误的相位误差,提升了基于最小二乘(Least Square,LS)或加权最小二乘(Weighted LS,WLS)准则的距离空变相位误差的反演精度。图8和图9都为3.6 GHz带宽的超高分辨成像结果,其中图9为局部细节图,可以看出高压电塔的细节轮廓很清晰。应当指出的是,由于文献[42]所提方法没有考虑距离散焦对运动误差估计的影响,因此,在较大斜视角模式或者运动误差较大的情形下,该方法对运动误差估计的精度会有所下降甚至失效。

图6 采用Two-step进行运动补偿后的RCMC结果Fig.6 The results of RCMC after motion compensation by Two-step algorithm

图7 采用文献[54]所提方法进行运动补偿后的RCMC结果Fig.7 The results of RCMC after motion compensation by the algorithm in Ref.[54]
3.3 大斜视成像算法
为了实现对区域外的场景进行监视和快速重访,显著提高SAR的灵活性,扩大其应用范围,SAR工作于斜视模式。基于这一特殊构型导致其回波数据存在距离向与方位向的一次耦合即距离走动,距离单元徙动RCM变得异常明显,使得RCMC的实现变得更为复杂,对应的成像算法也变得更复杂。文献[59,60]提出了非线性变标(Nonlinear Chirp Scaling,NCS)算法,考虑了二次距离脉压项(Secondary Range Compression,SRC)的空变性,但未考虑高次项的空变性,能够实现小斜视情况下的RCMC;RMA[61]可以无近似条件实现目标点的精准RCMC,但其波数支撑区受斜视角限制,无法实现大斜视全分辨率;为了应对大斜视情况,文献[62]提出了一种扩展的非线性变标(Extended NCS,ENCS)算法,其采用级数反演方法(Method of Series Reversion,MSR)[63]引入了空变的高阶项,提高了大斜视情况下的图像2维聚焦深度;同时文献[64]提出了改进的RMA算法,通过“旋转频谱”的预处理,增大了波数支撑区的有效范围,可实现大斜视高分辨率成像;上述算法都基于“倾斜2维频谱”,无法避免实现过程中补零操作带来的额外运算负担,同时无法有效的解决更大斜视时带来的频谱折叠问题。图10为采用文献[64]所提的改进RMA算法实现的X波段0.1 m分辨率成像。
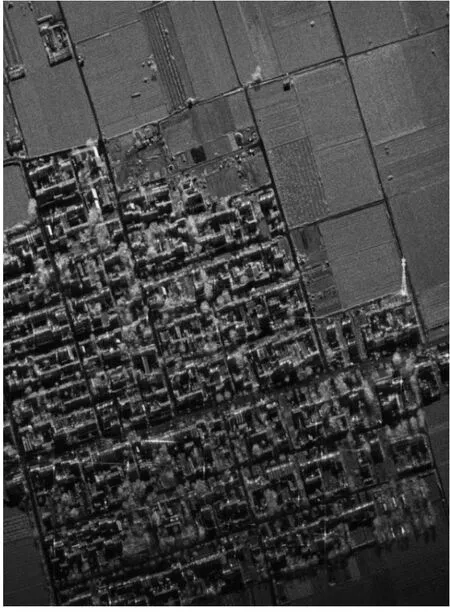
图8 0.04 m超高分辨成像结果Fig.8 Imaging results with 0.04 m ultrahigh resolution
为了有效地解决更大斜视角引入的频谱折叠问题,通常采用基于走动校正的“正交谱”处理算法。然而线性走动校正会引入方位空变问题:(1)徙动的方位空变:位于同一个距离单元内的点目标,它们的二次距离单元徙动(Quadratic Range Cell Migration,QRCM)各自不同;(2)相位的方位空变:同一距离单元信号的方位调频率各自不同。文献[65]提出了一种基于“正交谱”的斜视RD算法,忽略了方位空变性,仅可以处理低分辨率的小场景数据。为了提高方位聚焦深度,文献[28,66]提出了一种方位NCS算法,引入了方位向扰动函数,校正了方位调频率的方位空变性。随着分辨率提高以及测绘带扩大,QRCM方位空变现象越来越明显,上述的徙动校正算法会使边沿点目标存在严重的剩余RCM,导致图像散焦。对此,文献[29]提出了改进的NCS算法,同时考虑相位和QRCM方位空变性,其在距离脉压及QRCM校正之前对信号进行距离NCS处理校正RCM,然而其算法推导过程中存在多处近似且处理过程比较复杂,不利于实时成像。文献[67]提出了方位FNCS算法也可实现大斜视成像。上述算法都是基于理想情况或者高精度惯导下,并没有考虑到运动误差。

图9 0.04 m超高分辨局部成像结果Fig.9 Local imaging results with 0.04 m ultrahigh resolution
非理想或者惯导精度不足情况下,SAR平台的运动误差会给徙动校正带来很大的影响,导致成像算法精度变低甚至失效。随着斜视角的增大,运动误差的2维耦合性越强,形式更为复杂,如何有效的将徙动校正算法和运动误差补偿算法结合起来是个难点。文献[15]提出了一种基于RMA的斜视相位梯度自聚焦(Squint Phase Gradient Autofocus,SPGA)算法,推导并分析了RMA处理后误差的形式,但并未考虑剩余误差包络的空变性,处理测绘带宽带以及斜视情况有限;为了解决该问题,文献[16]提出了一种基于RMA的改进鲁棒性自聚焦算法,分析了“误差模型”先验信息,利用局部最大似然加权SPGA(Local Maximum Likelihood-Weighted SPGA,LML-WSPGA)估计并反演出距离空变误差,最后分两步去实现了误差的精确补偿,提高了成像质量。文献[68]提出了一种结合极坐标格式算法(Polar Format Algorithm,PFA)和对比度(Phase Adjustment by Contrast Enhancement,PACE)的自聚焦算法,也考虑了误差的空变性。上述补偿算法都是基于RMA或PFA实现的,无法解决前面提到的频谱折叠问题。对此,文献[69]提出了一种基于方位重采样的运动补偿算法,走动校正有效的解决了频谱折叠问题,通过方位重采样解决了方位空变问题,并分析方位重采样前后误差变化反演重采样后新的误差形式,最后结合常规的运动补偿算法实现高精度运动补偿。如图11所示,其为50°大斜视情况下,结合方位重采样的实测数据处理结果。
4 弹载合成孔径雷达成像
由于具有高的飞行速度以及大机动的特点,弹载SAR平台又称为高速机动平台,可实现提前观测的需求。根据导弹的飞行阶段以及运动特性,弹载SAR通常分为平飞段大斜视成像和俯冲段曲线轨迹大斜视成像。另外,前视成像相比于大斜视成像能够更早的提前观测到目标,因此也受到了国内外研究人员的广泛关注。为了提高后续SAR图像的匹配概率,弹载SAR工作在环扫模式[70],因此环扫成像算法的研究对后续的匹配制导工作具有积极的意义。

图10 X波段0.1 m大斜视成像结果Fig.10 0.1 m resolution imaging results in squint mode and X band

图11 X波段0.8 m分辨率大斜视50°方位重采样成像结果Fig.11 0.8 m resolution imaging results by azimuth resampling with squint angle of 50° and X band
4.1 平飞段大斜视成像算法
弹载平飞段大斜视成像面临的问题主要是由高速运动和大斜视观测的特点所引起的。传统成像算法的提出通常基于“停-走-停”的假设,即认为雷达收发同一个脉冲的位置相同,而平台的高速运动特点导致雷达平台收发同一脉冲的位置分离,导致传统的“停-走-停”模型不再成立。大斜视观测一方面会导致方位频谱出现折叠的现象,导致传统频域成像算法无法直接处理大斜视数据,另外大斜视观测模式下的距离与方位耦合更为严重,增加了成像处理的难度。因此,大斜视成像一般采用时域走动校正的方法将大斜视频谱校正为正侧视频谱,一方面可以避免方位频谱折叠的问题,另一方面能够大幅度消除距离与方位之间的耦合,但因此也会引入多普勒参数方位空变的问题,导致传统基于“方位平移不变”假设的成像方法失效。弹载SAR实时处理的需求一般要求采用子孔径的处理方法,全孔径方法比如NLCS[67]虽然能够校正多普勒参数空变的问题,但无法将全孔径算法直接用于子孔径。文献[71]详细分析了子孔径成像的优势并提出了相应的成像算法,但没有考虑多普勒参数空变的问题。文献[72]详细分析了正侧视模式下高速运动平台下采用“停-走-停”模型带来的近似误差,建立了精确的回波模型,并基于该回波模型提出了一种适用于聚束SAR的成像算法。文献[73,74]采用时域线性走动校正的方法来消除大斜视成像中距离方位的耦合,但也会因此引入严重的方位空变。因此,文献[73]提出了一种结合SPECAN处理的子孔径高阶相位校正方法(High-order Phase Correction Approach,HPCA),校正了多普勒调频率的1阶和2阶方位空变。而文献[74]对子孔径数据采用频率非线性变标(Frequency-Nonlinear-Chirp-Scaling,FNCS)的方法对多普勒参数(多普勒中心和多普勒调频率)的方位空变特性进行校正。文献[75]提出了一种适用于子孔径成像的ω-k算法,采用方位重采样的方法[69]消除多普勒调频率的方位空变特性,并采用SPECAN处理将子孔径数据聚焦在多普勒域,克服了子孔径时域聚焦需要大量补零的问题。文献[76]详细分析了大斜视宽幅成像下多普勒中心2维空变对成像的影响,并提出了一种带有多普勒中心空变校正的方位向处理新方法,提高了方位聚焦质量。如图12,比较其多普勒中心空变校正前后成像结果,可以看到结果得到很大的改善。
4.2 俯冲段曲线轨迹大斜视成像算法

图12 Ku波段1.36 m分辨率65°大斜视成像结果Fig.12 1.36 m resolution imaging results in 65° of squint mode in Ku band
前面提到对于平飞段大斜视成像,时域线性走动校正会引入方位空变。然而对于俯冲曲线轨迹大斜视成像,俯冲曲线轨迹的运动特点使得雷达回波存在固有的方位空变。通常为了解决大斜视成像带来的问题,首先需要采用时域线性走动的方法对雷达回波进行处理,但因此也会改变雷达回波固有的方位空变特性(改善或恶化)。目前,针对俯冲曲线轨迹大斜视的成像方法可以分为全孔径方法和子孔径方法,理论上,全孔径算法的处理精度会更高,但子孔径算法更有利于实时处理。文献[77,78]提出了一种特定加速度情形下的近似斜距模型,能够避免采用级数反演的方法获得2维频谱,2维频谱表达式更为简洁,并基于该新的斜距模型以及2维频谱给出了曲线轨迹下的全孔径成像算法,但没有考虑大机动和大场景等可能带来的多普勒参数方位空变的问题。文献[79]提出了一种改进的子孔径机动平台大斜视成像方法,该方法在方位频域进行分块处理以校正方位空变的RCM,并采用方位NCS校正多普勒参数的方位空变,然而存在着子孔径分块相位不连续的问题,文献[80]提出了一种基于级联两步NCS的子孔径频域成像方法,第1步是采用NCS抑制方位空变的RCM,无需在方位频域进行分块处理,避免了方位相位不连续的问题。第2步是采用NCS消除多普勒参数的方位空变,实现了方位统一聚焦。图13为Ku波段1.5 m分辨率大斜视俯冲段处理结果。文献[81]提出了一种基于局部直角坐标和子区域处理的机动大斜视频域成像算法,采用子区域处理方法校正方位空变的包络和相位,避免了频域子孔径方法[79]存在方位相位不连续的问题。
为了满足多模式观测的需求,文献[82,83]提出了适用于俯冲曲线轨迹平台的多模式统一成像算法。与直线轨迹平台的多模式统一成像不同,俯冲曲线轨迹平台多模式的频谱混叠不仅与波束控制有关,而且与雷达平台的加速度直接相关。文献[82]通过分析表明了在某些情形下加速度对频谱混叠的影响会更大,并提出了一种将加速度考虑进来的改进的“Two-step”方法,消除了方位频谱混叠对成像的影响。在此基础上,文献[83]采用方位NCS进一步校正了多普勒参数的方位空变,提升了方位聚焦的性能。应当指出的是,俯冲曲线轨迹的雷达回波存在固有的方位空变,而为了克服大斜视成像面临的问题,通常需要引入时域线性走动的方法,但因此也会改变雷达回波固有的方位空变特性,甚至会进一步恶化方位空变。然而上述针对俯冲曲线轨迹大斜视成像的算法未考虑时域线性走动校正对方位空变的调制机理,可能会增加后续方位空变校正的难度或降低现有算法对方位空变校正的性能。
除此之外,文献[84]提出了一种适用任何已知轨迹的SAR的BP成像算法,无需对斜距模型进行任何近似,可以实现高分辨成像。但在投影过程中,需要对所有像素点的斜距历程逐次进行计算,需要消耗较多处理时间。为了提高效率,又提出了快速后向投影(Fast Back Projection,FBP)[85]和FFBP[86]算法,虽然FFBP算法具有更高的运算效率,但其多级运算形式不利于并行运算,在条件允许下,一般采用更适合并行运算的FBP算法。文献[87]从斜距历程形式出发,提出一种基于场景划分的快速后投影成像算法,在FBP算法的基础上进行改进,将全场景分为若干个子场景,对同一块子场景中的像素点通过平面波假设进行距离徙动近似,解决了FBP算法成像需要逐点计算斜距的问题,进一步提升了成像效率。
4.3 前视成像算法
传统的单基SAR高分辨成像理论是利用雷达平台与目标的相对运动形成大的多普勒带宽,从而实现方位高分辨率成像。而单基前视成像受雷达平台与目标之间的相对运动几何的限制不能在方位形成多普勒带宽,因此传统的单基SAR成像理论不具备前视高分辨成像的能力。目前,国内外提出了一些新的体制和技术以改善单基SAR前视成像的分辨率:(1)从信号处理上提高雷达成像分辨率,超分辨成像的方法对实波束雷达数据进行处理能够提高实波束成像的分辨率,主要方法包括基于正则化的超分辨方法[88],基于统计优化的超分辨方法[89],量子关联成像技术[90]和带宽外推方法[91]等,这类方法对孤立的单目标或多目标具有很好的超分辨成像效果,但对于场景中复杂的面目标无法实现超分辨成像,甚至有可能放大噪声而降低图像质量;(2)可以从雷达体制上提高雷达成像分辨率,采用大阵列天线的前视成像通过多个通道发射信号同时多个通道接收回波信号,能够有效增加等效孔径长度,提升了雷达成像的分辨率能力,但该类方法需要较大的阵列天线[92-94]。双基地前视SAR成像新体制通过收发平台分置使得雷达平台对目标形成了大多普勒带宽效应,提高了雷达前视成像的分辨能力。西安电子科技大学的邢孟道团队[95]在机动平台双基前视成像这一方向做了大量的工作,详细分析了该构型下的系统特性,提出了相应的弹道设计方法[96]、回波模拟方法[97]和成像方法[98,99]等。

图13 Ku波段1.5 m大斜视俯冲段处理结果Fig.13 Ku band imaging results of 1.5 m resolution in the case of dive trajectory and squint mode
4.4 环扫成像算法
为了提高景象匹配准确度,需要获取更为丰富的地物特征信息的SAR图像。然而传统条带模式的弹载SAR斜视角固定,只能对平台一侧的带状区域成像,测绘带有限,不利于雷达获取全方位的场景图像,因此采取波束扫描[100]方式进行大范围观测。由于波束扫描的作用,测绘区域随扫描角度变化而变化,使得接收回波形式更为复杂,具体表现为更为严重的距离方位耦合性以及对应多普勒运动参数变化。为满足弹载实时成像需求,需要建立合适精确的数学模型简化算法复杂度,在合理近似条件下推导信号的精确表达式,并提出先进的成像算法。环视扫描SAR普遍存在空变问题,具体表现为多普勒中心空变以及线性走动空变。传统的RD算法并未考虑线性距离走动和多普勒中心的空变,只能处理小测绘带短时间低分辨场景。为此,文献[70]提出了一种改进的子孔径RD成像算法,通过距离分块校正线性走动空变,并依赖数学模型精确推导多普勒中心空变形式,然后进行补偿校正,提高宽测绘带成像能力。
5 星载合成孔径雷达成像
星载SAR飞行轨迹平稳,覆盖范围广、可以远程监视运动目标、且具有强的抗摧毁能力,因此其在海洋观测、全球地理测绘、军事观测等方面得到了广泛的应用。为了能够看得更清晰看得更远,高分辨率大测绘带成像算法一直是星载SAR的研究热点。另外,多模式统一成像处理算法的提出也为星载SAR带来很大的便捷。
5.1 星载SAR高分宽幅成像算法
高分辨宽测绘带(High-Resolution and Wide-Swath,HRWS)模式的多通道合成孔径雷达(Multi-Channel SAR,MC-SAR)成像系统是星载SAR系统一个重要发展趋势[101],其利用空域维度信息进行高分辨成像处理,特别是分布式卫星SAR系统,其可以有效地突破传统单通道SAR系统面临的最小天线面积限制,这里主要论述多通道体制下的高分宽幅成像算法。
传统的单通道星载SAR为获得方位高分辨率,系统通常需要较大的脉冲重复频率(Pulse Repetition Frequency,PRF),而星载SAR宽测绘带的需求则要求PRF不能过大。因此,单通道星载SAR中的方位高分辨率和宽测绘带是一对矛盾,而多通道SAR体制则可以有效地解决这一矛盾从而实现高分辨宽测绘带对地观测。由于星载SAR多通道[102]成像需要对多个通道的回波信号进行联合处理,其对通道之间的一致性要求非常高,但通道之间通常会存在幅度和相位的差异。因此,多通道SAR成像首要解决的问题是如何对通道之间的误差进行精确估计和补偿。另外,每个通道接收的雷达回波都表现为方位欠采样(多普勒谱模糊),需要对多个通道的数据进行无模糊多普勒谱重构。因此,无模糊多普勒重构也是多通道SAR成像过程中得一个关键步骤。
早期的多通道误差校正主要考虑恒定的幅度和相位误差,其中两种比较经典的方法是基于子空间和基于相邻通道互相关的校正方法[103-105]。文献[34,106]进一步考虑了距离采样时间误差、距离空变相位误差和基线测量误差对多通道方位重构的影响。文献[34]提出了一种基于两步校正的通道误差校正算法,其中的通道粗校正是用于校正距离采样时间误差、恒定的幅度和相位误差以及天线位置误差,而通道精校正是用于补偿残余的常数相位误差、基线测量误差和距离空变的相位误差,但该方法要求系统具有冗余的自由度。在系统不存在冗余的自由度情形下,文献[106]提出了一种基于加权最小熵(Weighted Minimum Entropy,WME)和局部最大似然(Local ML,LML)的距离空变的通道误差校正方法,该方法采用WME对距离分块后的数据进行相位误差估计,并根据每个距离块的相位误差采用LML估计距离空变的相位误差。应当指出的是,以上基于子空间的误差校正方法通常没有考虑模糊分量随基带频率变化的情况,在子空间划分时可能会降低噪声子空间和信号子空间的正交性。针对该问题,文献[107]提出了一种改进的基于子空间的通道误差校正方法,该方法通过空间谱估计技术能估计出不同基带频率下模糊分量的准确信息,提高了通道误差估计的精度。
在完成通道误差估计与补偿后,由于每个通道的回波信号都存在多普勒谱模糊,需要对多个通道的回波信号进行方位信号重构获得多普勒无模糊信号。目前主要有两种经典的多通道方位信号重构方法:传递函数法(Transfer function algorithm)[108]和空时自适应处理(Space-Time Adaptive Processing,STAP)算法[109],后者相比于前者对阵列流型精度的要求更低,稳健性更高,但STAP方法在模糊分量方向形成的凹口深度有限,无法对强散射点形成足够好的模糊抑制效果。文献[34]在STAP方法的基础上提出了一种基于多个多普勒方向约束的解模糊方法,能够对场景中的强散射点形成更好的模糊抑制效果。文献[110]在进一步考虑地面高程下提出了一种改进的多普勒模糊抑制算法。需要指出的是,以上基于STAP的方法通常要求模糊分量的个数满足一定的条件(认为模糊个数随基带频率恒定不变),具有一定的局限性。文献[111]提出了一种基于多普勒谱估计的多通道SAR方位信号重构方法,该方法通过空间谱估计方法估计出不同基带频率的Capon谱,能够更好地保持不同基带频率下多普勒谱的完整性,提高了多通道方位重构的图像质量。图14为多通道成像流程图,其主要步骤如图所示,通道误差校正是其核心。
对于多通道SAR系统,动目标成像聚焦越来越受到人们的关注。对动目标的斜距速度估计是动目标重定位和成像处理的关键步骤。已有不少文献[112-114]等对动目标斜距速度估计进行了研究和讨论。当动目标的多普勒谱偏移超过半个PRF时,动目标将产生速度模糊现象。为了解决这个问题,文献[115,116]等分别提出多种方法,如提高系统PRF,采用非统一的PRF,采用多频天线阵列等。同时,文献[117,118]提出了一些其它动目标参数估计及斜距模糊速度求解方式。由于低PRF和单个通道回波存在多普勒谱模糊,这些算法并不适合对基于沿方位多个接收孔径的高分辨宽测绘带多通道SAR系统进行动目标斜距速度估计。对于低PRF情况,文献[119]提出了一种基于压缩感知(Compressed Sensing,CS)的动目标运动参数估计算法。该算法适用当SAR系统的PRF低于方位多普勒谱带宽的情况。

图14 多通道成像流程图Fig.14 The flowchart of multi-channel imaging
除此之外,成像聚焦处理也是非常重要的。对于传统SAR系统,文献[120-122]等已经分别对动目标聚焦成像处理算法进行研究和讨论。由于每个通道回波都存在多普勒频谱模糊,这些已有算法将不适用于基于沿方位多个接收孔径的高分辨宽测绘带多通道SAR系统。文献[123]针对多通道SAR系统提出了一种动目标聚焦算法,其对动目标的信号特点进行详细讨论。
总得而言,为了实现星载SAR宽测绘带的高分辨成像,很多新体制成像模式随之出现,最常见的便是多通道模式,除此之外还有Mosaic模式[124],以及可变PRF模式[125]等。
5.2 星载多模式统一成像算法
星载雷达成像模式主要由条带、聚束、滑动聚束、TOPS SAR和扫描SAR组成。针对不同的成像模式,成像算法也不尽相同,条带模式下具有代表性的成像算法有RDA和CSA;聚束模式下具有代表性的成像算法:基于子孔径处理的频率变标算法(Frequency Scaling Algorithm,FSA)[126]、全孔径处理的Two-step算法[127]、宽场景极坐标格式算法(WPFA)[128]、Stolt极坐标算法(SPA)和微分多普勒算法(DDA)[129];针对滑动聚束模式,目前具有代表性的成像算法主要有基于子孔径的扩展CS(Extended Chirp Scaling,ECS)[130]、聚束的两步处理算法(Two-step)[131]和基于子孔径的方位基带变标算法(Baseband Azimuth Scaling,BAS)[132],此处的“Two-step”与前文运动补偿里的“Twostep”原理不同。针对TOPS SAR模式的成像算法主要有频移Chirp-Z变换算法(Chirp Z-Transform,CZT)算法[133]、基于子孔径的BAS算法以及结合“Two-step”和“BAS”的组合算法[134]。此外,扫描SAR模式下的代表性成像算法为SPECAN[135]算法和ECS算法。
这些算法错综复杂,通常针对一种模式就要研制一个相应的处理器,硬件的研制成本很高,因此统一化处理成为近年来的热点问题。德国DLR研究人员在TerraSAR-X系统中设计了多模式通用成像算法[136],主要以CSA为核心模块,能够对条带和扫描模式统一成像,但无法处理大斜视角下的成像问题,文献[137]对上述算法进行了改进,引入模型参数变换使之适用于处理较大多普勒中心的数据,但是没有提出针对性的运动补偿算法。多模式统一成像的难点集中体现在寻找表征不同模式的影响因素上,国内西安电子科技大学的邢孟道团队在研究表征不同模式的特性方面做了很多贡献。文献[138]提出了一种针对TOPS和滑动聚束的基于方位Deramp预处理的变标算法,利用Deramp操作等一系列实现解模糊和2维频谱重构,以及方位变标去斜操作可实现两种模式全孔径统一成像,此时信号聚焦在频域;为了提高算法高效性,文献[139]提出了一种广义的PFA算法(Generalized PFA,GPFA),该算法结合了传统PFA算法对信号处理的高效性和“Two-step”方法中解模糊的有效性。考虑到算法更广的通用性,文献[140]提出了一种基于分数阶傅里叶变换(FrFT)的统一处理算法(Unified Focusing Algorithm,UFA),该算法可实现条带、聚束、滑动聚束和TOPS SAR统一处理,极大的降低了硬件和软件的研发成本。为了实现高分宽幅多模式统一成像,文献[141]提出了一种统一的全孔径多通道波束指向SAR(Beam Steering SAR,BS-SAR)方位预处理算法,基于波束压缩和带宽压缩的技术,在不改变信号角度-多普勒或空时平面特性情况下有效地降低BS-SAR信号混叠程度,使得空时频解模糊的方法可以得到应用,最后与UFA算法进行结合,实现多通道BS-SAR的统一成像算法处理。图15-图17分别为星载SAR条带,TOPS,聚束模式下的成像结果。其中图15为GF-3号录取的1.5 m分辨率结果,图16为Ku波段3.5 m分辨率结果,图17为C波段1 m分辨率结果。
综上所述,目前的多模式统一成像算法中只有UFA可以满足统一处理4种模式的要求。UFA是总结了4种成像模式中共有的表征因素:天线波束指向。然而,UFA只考虑了天线波束的指向变化会导致方位回波信号的多普勒中心随方位时间近似线性变化,并没有考虑出现非线性变化的情况。实际上,各模式通过长时间照射相干积累提高方位分辨率的本质是相同的,因此对各模式进行统一建模,再总结各模式在这些性能上的异同,进而研究统一的成像方法也是一种可行的思路。
5.3 低轨道超高分辨率成像算法

图15 GF-3号1.5 m条带SAR图像Fig.15 1.5 m resolution SAR imaging results in GF-3

图16 Ku波段3.5 m TOPS SAR数据聚焦结果Fig.16 3.5 m resolution TOPS SAR imaging results in Ku band
相比于星载高分辨率成像,星载超高分辨率对目标的观测时间更长,通常需要采用聚束或者滑动聚束的工作模式。由于滑动聚束相比于聚束模式能够实现更强的覆盖能力,超高分辨率滑动聚束成像问题受到了更多的关注。随着分辨率的提升,雷达回波信号的方位频谱模糊会变得更为严重,但同样可以和高分辨率滑动聚束模式成像处理一样,采用Two-step方法或基于子孔径BAS的方法对雷达回波信号进行方位预处理,获得方位频谱无模糊信号。另外,星载弧线轨道随着分辨率的提升会变得更为明显,不能采用基于“方位平移不变”假设的传统频域算法来进行精确成像处理,还需进一步考虑信号的方位空变特性对成像的影响。文献[142]提出了一种星载超高分辨率滑动聚束SAR成像方法,该方法将卫星整个运动轨道进行分段处理,对每一段的雷达回波数据采用标准的成像算法进行成像处理,并指出该方法的关键之处在于如何对每段处理后的数据进行精确拼接(同一目标在不同分段的聚焦位置不一样),该方法类似于成像处理中常采用的子孔径成像方法。文献[143]提出了一种适用于超高分辨率的高阶成像算法,考虑了曲线轨迹给成像带来的影响,但没有考虑卫星等效速度的方位空变特性。文献[24]对超高分辨率的星载SAR数据进行了处理,将超高分辨率情况下的弯曲轨道与直线轨道之间的偏差当作误差加以补偿,类似于载机SAR数据处理当中的运动补偿过程,图18为文献[24]给出的TerraSAR 0.16 m分辨率处理结果。文献[144]提出了一种基于速度变标的超高分辨率滑动聚束成像算法,该方法通过类似于方位重采样的操作对等效速度的方位空变特性进行校正,将曲线轨道等效为直线轨道,进一步提高了方位聚焦性能。在此基础上,文献[145]进一步对斜距模型和成像算法进行了相应的修正,使得其能够对斜视数据进行精确的成像处理,提出了一种全孔径超高分辨率斜视滑动聚束成像算法。与文献[144]采用的子孔径成像不同,文献[145]采用的是全孔径成像策略。
5.4 中/高轨道长合成孔径时间成像算法
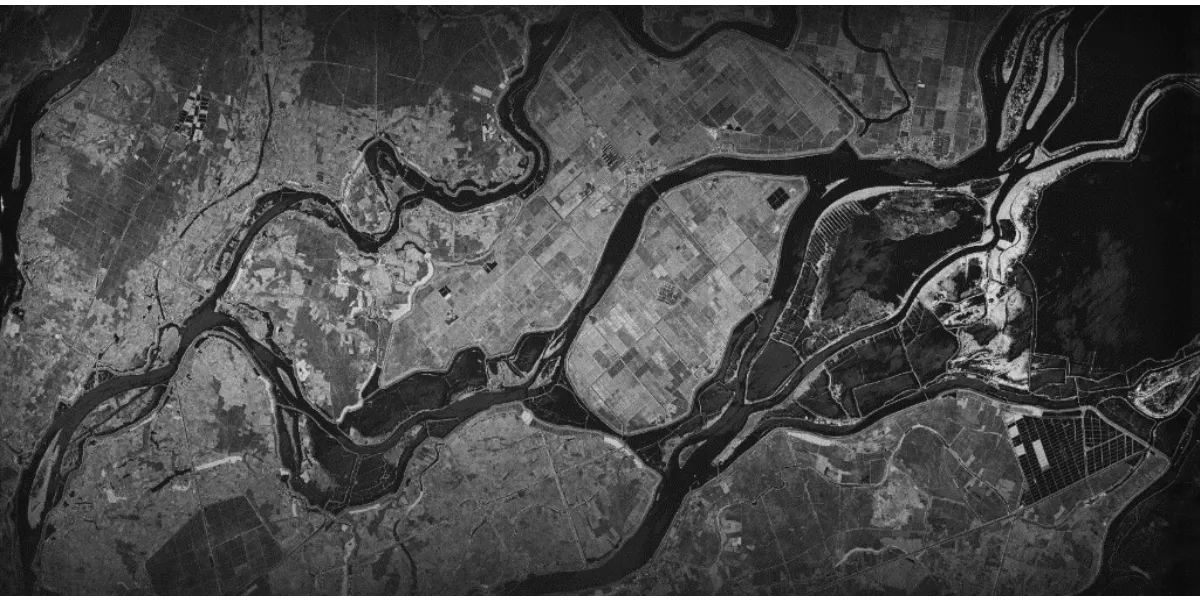
图17 C波段1 m聚束成像结果Fig.17 1 m resolution Spotlight SAR imaging results in C band

图18 TerraSAR-X 0.16 m分辨率SAR图像[24]Fig.18 0.16 m resolution SAR imaging of TerraSAR-X[24]
中/高轨道卫星的轨道高度通常在几千公里以上甚至到几万公里,相比于低轨道卫星,雷达平台相对于目标的运动速度将会小的多,因此雷达对场景的观测时间需大幅增长才能满足预期分辨率的要求。目前而言,中/高轨道卫星的合成孔径时间通常在数十秒到数千秒之间,如此长的合成孔径时间导致卫星的曲线轨道非常明显,雷达回波信号的距离空变和方位空变特性都非常严重。另外,中/高轨道卫星的轨道高,雷达发射和接收同一信号的位置分离导致传统基于“走-停-走”假设的成像模型不再成立。文献[20,32]较早地推导出了基于四次多项式精确的2维频谱以及基于该频谱提出了一种CS算法。文献[25]提出了一种适用于中轨道宽测绘带SAR的NCS算法,进一步扩大距离测绘带。文献[21,146,147]分析了停走误差和曲线轨迹对成像的影响,并提出了相应的频域成像算法。为了进一步考虑长合成孔径时间下严重的方位空变特性,文献[148]将非线性变标(NCS)的思想从距离维扩展到方位维,提高了方位聚焦性能。西安电子科技大学的邢孟道团队针对中/高轨道卫星SAR做了大量的理论研究工作,文献[149]对高轨道卫星SAR的成像分辨能力进行了详细的理论分析和评估。文献[22]针对方位空变特性,采用方位频域分子带的方法消除方位空变对方位聚焦的影响,但子带拼接不可避免地会出现栅瓣现象,降低了图像质量。为了进一步提高以上算法地聚焦性能,文献[23]提出了一种基于串联奇异值分解(Singular Value Decomposition,SVD)的方位空变校正方法,该算法引入对2维频谱的方位空变特性进行分析,2维频谱经过SVD后需由两个特征量精确表示,所提算法先后使用两次SVD依次补偿这两个特征分量,有效校正了信号的方位空变。文献[150]中的成像方法在2维空变校正之前,引入最优的线性走动校正因子尽可能地减少了方位空变,提升了现有成像算法的性能。另外,该方法将SVD的处理流程从方位维扩展到距离维,方位向处理仍然采用文献[23]中串联的SVD方法,而距离向处理则采用距离分块的策略克服SVD多个特征分量的问题。需要指出的是,针对方位向SVD分解后存在3个及以上的特征分量的情形,以上基于SVD成像方法的精度会有所下降,若采用多次SVD的处理流程,则会导致成像处理流程变得更为复杂。
需要指出的是,上述成像算法仅适用于场景中静止目标成像。由于中/高轨道卫星与目标的距离较远(约36000 km),导致雷达回波信号的信噪比较低。因此为了提高中/高轨道卫星SAR对动目标的检测和成像性能,通常需要采用长合成孔径时间观测的模式。针对长合成孔径时间下运动目标特别是舰船目标的成像主要面临两个严峻的挑战:(1)运动目标在长合成孔径时间下的平动特性异常复杂,严重影响了动目标长时间相参积累的性能,降低了动目标检测的性能;(2)针对舰船目标成像,舰船目标在海面风浪的长时间影响下存在复杂的3维摇摆运动,使得舰船上各个散射点在方位向聚焦上存在严重的空变特性,给舰船目标长时间统一相参积累带来了很大困难。目前针对复杂平动补偿的动目标成像方法包括参数估计方法[151,152]和非参数估计方法[153],需要指出的是,参数化估计方法通常采用高维度匹配滤波的思想对动目标的运动参数进行估计,其精度较高但存在高维度搜索的问题。针对复杂3维摇摆的舰船目标成像方法主要包括基于非平稳信号的ISAR成像方法;基于超分辨率算法的短孔径成像方法;参数化模型成像方法等[154]。需要指出的是,上述成像算法的提出主要针对较短合成孔径时间,在中/高轨道长合成孔径时间下的精度较差甚至失效。因此,目前针对中/高轨道长合成孔径时间下的动目标特别是舰船目标成像,对平动的补偿应在提高效率的同时满足精度要求,对3维摇摆的补偿首先应重点提高其估计和补偿精度。
6 结束语
多平台合成孔径雷达成像算法是雷达探测领域的主要研究方向之一,其研究进展有助于开拓雷达回波信息的可用维度,其研究基础为进一步提升雷达探测与识别能力提供了有力的保障。近年来,随着合成孔径雷达技术的发展和硬件水平的提高,SAR系统朝着“搭载平台多样化、模式全面化、体制先进化”趋势发展,“多源、多维度、多融合”的雷达数据对多平台合成孔径成像算法的要求变得更加严格。然而多平台合成孔径成像算法研究毕竟是一个集多平台,多模式,多维度的SAR信号处理技术研究,还存在着很多有待解决的问题,从现有的研究状况分析,可以预计未来将在以下方面展开深入地研究:
(1)新体制超高分辨成像:近年来随着子带宽合成与微波光子等雷达波形成技术的成熟发展与应用,尤其是微波光子技术方面,国内邢孟道团队在微波光子SAR/ISAR成像算法领域投入了大量工作,实现了带宽超过10 GHz的目标成像[155,156],解决了传统SAR在超大带宽线性不佳的问题,SAR逐渐朝着超分辨发展。未来超高分辨成像算法主要面临两个问题,一是超高分辨使得雷达信号的距离徙动特性更为严重,二是2维耦合运动误差的空变特性对成像的影响更大。因此,未来对超高分辨成像算法的研究应重点集中在如何提升目前理想成像算法的距离徙动校正精度以及误差估计与补偿的精度。
(2)面向大遥感数据的高效时域成像:传统的频域成像算法形式复杂,比较依赖构建的斜距模型,通用性不强,随着未来多平台SAR的发展,运动轨迹多变复杂时便会失效。而时域成像算法(比如BP算法)原理简单、适用性强,必然是未来成像算法的主要研究方向。目前BP算法有两大难点,一是大运算量和大数据冗余量使得数据处理效率低,二是目前的BP算法还不能有效地结合自聚焦算法。FBP和FFBP算法的提出对于运算效率的提高有着显著的作用,然而面对未来TB级数据甚至PB级数据的发展,运算效率仍然是个问题,同时如何有效结合运动补偿/自聚焦算法以提高成像质量依然是一个待解决的问题。因此,未来对时域成像算法的研究应重点集中在如何提高其效率以及运动补偿成像精度。
(3)成像与识别一体化:随着多平台SAR发展趋势看,目前的雷达体制仍然面临着实现目标探测、成像与识别一体化的难题,尤其对于未来复杂的战场环境。需要沿着雷达成像的灵活化、立体化、可视化的研究思路,重点研究:(a)面向对象的成像理论,包括以观测场景为输出坐标系的成像方法,以动目标为对象的SAR成像方法,以及面向场景的SAR图像质量评估体系;(b)高分辨立体化成像,包括基于立体视角观测的2维成像方法,解算目标3维信息的立体成像方法;(c)目标电磁特征可视化重构识别,包括目标电磁特征和可视化图像获取方法,结合深度学习网络的目标类别判断方法,以期实现多平台SAR对目标的成像与识别一体化。