合成孔径雷达三维成像
——从层析、阵列到微波视觉
2020-01-17丁赤飚仇晓兰梁兴东焦泽坤张福博
丁赤飚 仇晓兰 徐 丰 梁兴东 焦泽坤 张福博
①(中国科学院空天信息创新研究院 北京 100190)
②(微波成像技术国家级重点实验室 北京 100190)
③(中国科学院空间信息与应用系统重点实验室 北京 100190)
④(中国科学院大学 北京 100049)
⑤(复旦大学 上海 200433)
1 引言
以合成孔径雷达(Synthetic Aperture Radar,SAR)为代表的微波成像技术是高分辨率对地观测的重要技术手段,在军事侦查、地形测绘、环境监测、地质勘探和灾情调查等方面具有重大应用价值。然而,由于SAR与光学成像机理显著不同,SAR目标识别与图像解译难度极大,已成为制约当前星载和机载SAR装备应用效能有效发挥的关键瓶颈。其中的重要原因是传统SAR只能获取2维影像,在地形变化陡峭和环境复杂的区域,3维目标在2维图像上会产生严重混叠,导致大量目标看不清、辨不明、难以理解。SAR 3维成像可以直接获得目标的3维电磁散射结构,消除SAR图像中由于成像机理导致的收缩、叠掩、顶底倒置等现象,对3维环境构建、目标精细化解译、城市测绘以及灾害评估等应用具有重大意义。
在此背景下,SAR 3维成像技术受到了各国的重视,不断发展进步。以是否具备3维分辨能力为区分,SAR成像从2维到3维的发展过程大致可以划分为两个阶段。第1个阶段从上世纪60年代起,发展出干涉合成孔径雷达[1](Interferometric SAR,InSAR)和SAR立体像对技术[2,3](StereoSAR),以获得场景3维信息。然而,InSAR和StereoSAR技术本质上均是利用不同角度观测对配准后的像素进行3维位置的解算,对于同一像素中叠掩多个散射点的情况,只能求解合成散射中心的位置,因此仅能够获得3维表面信息,不具备3维分辨能力。第2阶段则从上世纪九十年代起,1995年美国海军研究实验室的K.K.Knaell和G.P.Cardillo[4]首次提出了3维SAR的概念,并提出了利用高度维的合成孔径实现3维成像的技术思路。在此之后,美国、欧洲、中国等均开展了大量SAR 3维成像的研究工作[5-11],目前主要形成了两种3维成像技术,分别是合成孔径雷达层析成像技术(SAR Tomography,TomoSAR)和阵列干涉SAR 3维成像技术(Array InSAR)。上述两种SAR 3维成像技术通过多次航过或多个天线的多角度观测,形成高度维的合成孔径,获得第3维分辨能力。然而上述技术需要大量的多角度观测,导致成像周期长或系统高度复杂,推广应用存在较大的难度。
综观SAR 3维成像技术发展,从早期的干涉SAR技术到现阶段的TomoSAR 3维成像技术,本质上讲均为利用精确的雷达成像几何物理模型,结合多角度观测进行目标3维位置解算。而实际上,在单幅SAR图像中,蕴含了场景与目标的结构、纹理、遮挡关系等3维空间线索,这些有效信息在目前的成像体制中尚未得到充分的挖掘与利用。本文提出了一种新的SAR 3维成像技术,称之为“合成孔径雷达微波视觉3维成像”技术,通过对微波散射机制和图像视觉语义的深入挖掘,提取雷达回波和2维图像中蕴含的3维线索,结合传统的SAR成像理论,实现高效3维成像,大幅减少所需观测的数目。
本文首先深入分析了当前合成孔径雷达3维成像技术的基本原理、技术特点和局限性。在此基础上,提出了合成孔径雷达微波视觉3维成像技术,详细介绍了SAR微波视觉3维成像技术的概念、内涵和关键科学问题,并给出了初步的技术途径,最后对未来的发展进行了展望。
2 TomoSAR 3维成像技术
2.1 TomoSAR 3维成像原理
针对大量存在叠掩现象的城区等复杂场景3维重建的目的,国内外研究机构开展了大量研究,借鉴医学CT(Computed Tomography)成像技术,提出了层析SAR(SAR Tomography,TomoSAR)3维成像技术。层析SAR 3维成像原理如图1所示。
图1展示了TomoSAR技术3维分辨能力的来源。与传统2维SAR成像相同,距离向通过发射大带宽信号结合脉冲压缩技术获得距离分辨率,方位向通过合成孔径获取分辨能力。为了获得高程向分辨能力,利用航迹精确控制、满足奈奎斯特定律的多次观测构建高程向的等效阵列,实现高度维的合成孔径,获得高程向分辨能力。TomoSAR 3维成像几何模型如图2所示[7],利用较小视角差异的多幅SAR图像,经图像配准后,逐像素进行解算。
TomoSAR成像数学模型如下,第n次观测得到SAR图像像素表达式如式(1)[6]

针对同一像素,多次观测得到的像素值构成观测向量y,将高程向离散化可以得到观测方程为

图1 TomoSAR 3维成像原理图Fig.1 Diagrammatic sketch of TomoSAR 3D imaging

图2 TomoSAR 3维成像几何原理图Fig.2 TomoSAR imaging geometry

其中,Φi,j=exp(-j4π/λ·Δbisj/R0)。根据式(2)即可求解得到目标散射系数沿高程向分布γ。
2.2 TomoSAR 3维成像研究现状
层析SAR 3维成像技术研究始于上世纪九十年代中期,其技术发展经过了实验室研究、机载层析成像以及星载层析成像3个阶段。1995年,欧洲微波信号实验室(European Microwave Signature Laboratory,EMSL)的Pasquali等人[8]首次证明了利用多次观测在高程向合成孔径实现高度维分辨是可行的,该实验室设计了具有8条基线的Ku波段雷达系统,对隐藏在介质中的两层金属球实现了高度维分辨,实现了层析SAR 3维成像技术从理论到实验的跨越。1998年,德国宇航局(Deutsches Zentrum für Luft-und Raumfahrt,DLR)的Reigber等人[9]开展了机载层析SAR成像技术的研究,利用L波段的机载SAR实测数据实现了对建筑和植被3维结构的重建,是世界上首个机载层析SAR 3维成像结果。2005年,意大利那不勒斯大学的Fornaro等人[10]利用欧洲遥感卫星(European Remote Sensing Satellite,ERS)在1992年至1998年间获取的意大利Naples地区30景SAR图像,首次实现了星载层析SAR 3维成像。2007年,德国TerraSAR-X(TSX)卫星发射,该卫星具有良好的控轨能力和极高的相位测量精度,聚束模式SAR图像分辨率可达1 m,进一步促进了TomoSAR技术的发展。2010年,德宇航的朱晓香等人[12]利用TerraSAR-X数据,首次获得了复杂城市场景(如LasVegas)的层析3维成像结果,见图3。在此之后,该团队又利用该卫星数据开展了丰富的星载TomoSAR研究,在层析SAR 3维成像算法方面取得了丰富的成果[13-18]。

图3 2010年,德宇航首个城区TomoSAR 3维成像[12]Fig.3 TomoSAR 3D imaging result of urban areas by DLR in 2010[12]
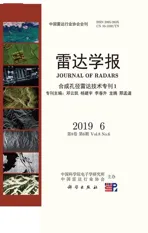
伴随着更多全极化星载与机载SAR系统的投入使用,极化层析SAR(Polarimetric TomoSAR,PolTomoSAR)技术应运而生,在森林生物量反演等应用中发挥重大作用[19]。此外,由于普通的TomoSAR成像从一个角度进行观测,SAR图像阴影区域无法实现层析成像,因此德国开展了机载圆迹层析(SAR Holography,HoloSAR)成像技术研究,实现了360度观测的3维成像[20]。图4展示了极化层析及HoloSAR 3维成像的部分结果。国内也纷纷开展TomoSAR技术的研究,中国科学院电子学研究所、武汉大学、电子科技大学等单位[21-24]均在TomoSAR成像算法方面取得了丰富的成果。
2.3 TomoSAR技术特点
TomoSAR 3维成像技术在城区等复杂地区3维成像中取得了巨大成功,然而在实际应用中面临两大主要困难。第一,利用传统信号处理方法(如匹配滤波、谱估计等),需要数十次甚至上百次飞行,周期长、成本高,不利于时效性要求较高的应用。第二,为了保证TomoSAR重轨观测SAR图像之间的相干性,需要实现航迹的精确控制,增加了实施的难度。
由于层析SAR 3维成像理论针对每一个距离方位单元进行处理,地物目标在高程向稀疏分布,因此压缩感知理论的提出为第1个问题提供了解决思路。2006年由Donoho等人[25]提出的压缩感知(Compressed Sensing,CS)理论,突破了奈奎斯特定律的限制,在满足稀疏性假设的前提下,能够利用少数观测以较高概率重建原始信号。2007年,Baraniuk等人[26,27]提出将压缩感知理论应用到雷达成像中。2009年,意大利的Alessandra Budillion等人[28,29]基于压缩感知理论进行了层析SAR仿真实验,指出压缩感知理论可以减少目标3维重构所需重轨观测次数,之后又将该技术应用于ERS卫星数据,成功实现了建筑物的3维成像。同年,DLR的朱晓香团队[16]将压缩感知理论应用于TerraSARX的高分辨率数据,获取了TerraSAR实测数据层析成像结果。2011年,该团队提出了SLIMMER算法并系统分析了算法性能。近年来,国内外学者针对结合压缩感知理论的层析成像开展了大量研究,在稀疏成像算法等方面成果丰硕[17,18,30-32]。图5展示了观测稀疏化前后层析成像结果的对比,利用7景图像实现了TomoSAR 3维成像,相比64景图像重建结果分辨率差异较小,证实了航迹稀疏化的可行性。
为了保证TomoSAR重复观测图像之间相干性,需要层析SAR重轨观测基线较短,避免空间去相关,对于重复观测的轨道控制精度提出了较高要求。随着卫星控轨技术的进步,诸如TerraSAR-X等卫星控轨精度已较高,如TerraSAR-X多次重复观测,相对于参考航迹轨道控制精度优于500 m,所有重轨观测航迹控制在以参考航迹为轴心250 m为半径的“管道”内(如图6所示),尤其在径向,重复轨道控制精度优于100 m[33],轨道测量精度则优于10 cm。目前,如TerraSAR-X,Cosmo-Skymed等高分辨率星载SAR系统均具有较高的轨道控制与测量精度[33-37],星载SAR的轨道控制精度已经能够满足TomoSAR的处理需求,但是机载系统由于受到气流等的影响,获得有效的TomoSAR数据非常困难。
总之,目前TomoSAR 3维成像处理仍然需要十余次严格控轨的重复观测,时间跨度较长,难以满足时效性要求较高的应用场景。
3 阵列干涉SAR 3维成像技术
3.1 下视阵列3维成像研究
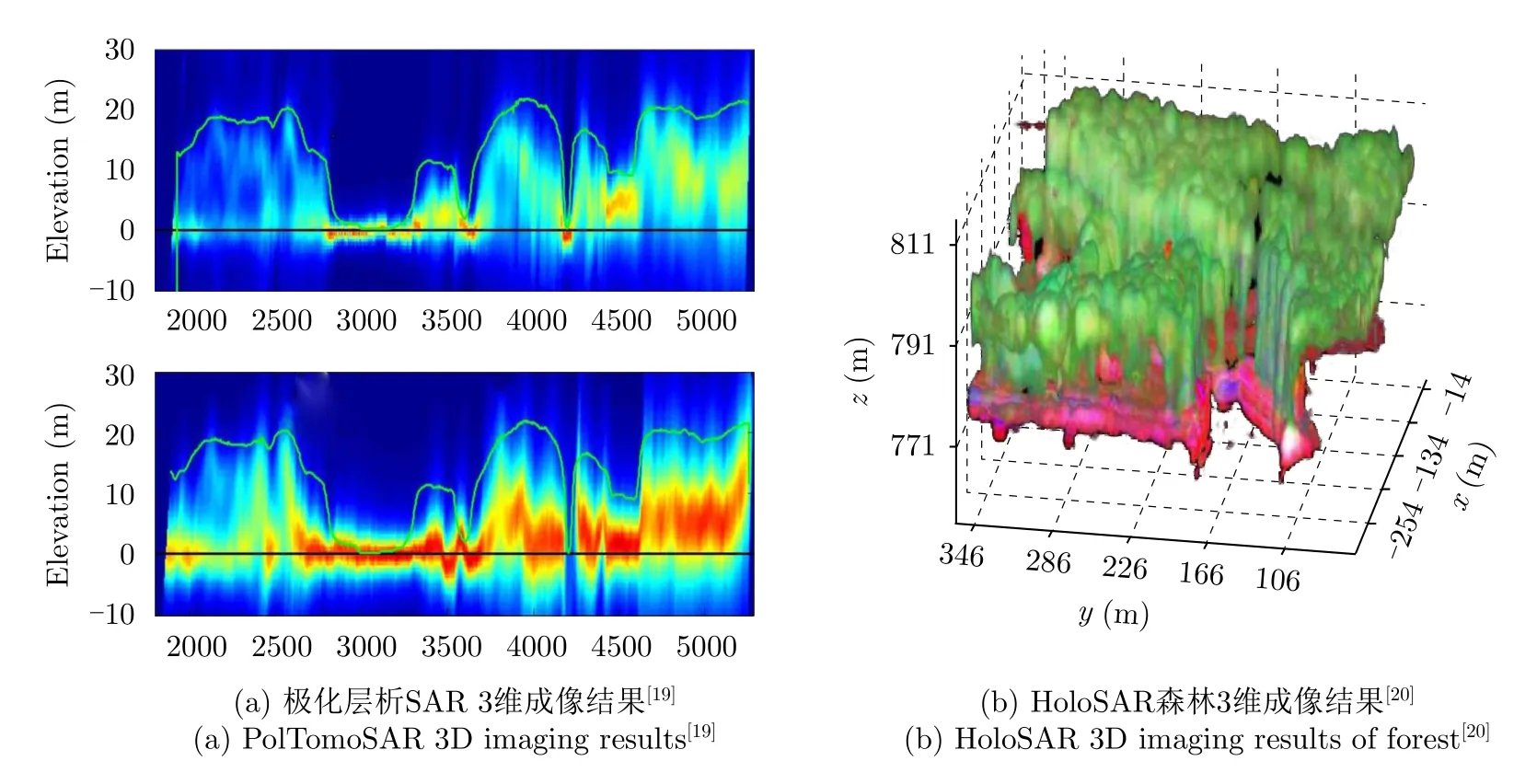
图4 极化层析SAR与HoloSAR 3维成像Fig.4 Three-dimensional imaging results of PolTomoSAR and HoloSAR

图5 德国联邦铁路公司总部层析成像结果[32]Fig.5 TomoSAR imaging results of DB Headquarters in Munich[32]
图6 TerraSAR-X卫星轨道控制精度示意图[33]Fig.6 Diagrammatic sketch of TSX orbit control performance[33]
下视阵列合成孔径雷达3维成像技术是一种基于阵列天线的SAR 3维成像技术,通过在跨航向安装阵列天线,以期对载机平台正下方场景实现3维成像。下视阵列3维成像技术工作示意图见图7。
下视阵列3维成像技术向飞机正下方发射宽带信号,结合脉冲压缩技术实现高程向分辨;在方位向借助平台运动获得航迹向多普勒信息,形成合成孔径,实现方位向分辨;在跨航向借助阵列天线实现跨航向合成孔径,进而实现跨航向分辨。

图7 下视阵列3维成像技术示意图Fig.7 Diagrammatic sketch of downward looking array 3D imaging
1999年,DLR首次提出了下视2维成像雷达的概念[38]。2004年,法国ONERA的Giret等人[39]提出了下视阵列3维成像技术,将阵列技术和合成孔径雷达相结合,能够获得跨航向、方位向和高程向的分辨能力。之后,其开始研制相应下视阵列3维成像系统DRIVE,该系统具有下视3维和正侧视2维两种工作模式,试验载机是翼展23 m重约900 kg的滑翔机[40]。2006年至2010年间,Nouvel等人[41]利用DRIVE系统开展了下视阵列成像试验,并公开了方位向长度1 km的方位-高程2维成像结果(见图8),其中跨航向测绘带宽度为42 m。德国FGAN-FHR的Klare等人[42,43]从2005年开始研制无人机下视阵列3维SAR系统ARTINO,载机翼展4 m、重量25 kg。2010年,针对定标点开展了飞行试验,但没有公布3维成像结果[44]。国内中国科学院电子学研究所、电子科技大学等单位[45,46]针对下视阵列3维成像开展研究,在成像算法以及试验装置研究等方面取得了丰富成果。
然而,下视阵列SAR受限于成像体制,存在以下问题:首先,下视阵列SAR测绘带宽一般较窄,例如DRIVE系统跨航向测绘带宽仅42 m,工作效率低下;其次,由于阵列下视SAR在跨航向采用实孔径进行分辨,为解决分辨率和测绘带宽之间的矛盾,需要系统具有很多的通道数量,使得系统具有较高的复杂度,成本较高;最后,由于采用下视模式,且阵列天线长度受限,其跨航向分辨率较低,3维重建点云密度较低,3维成像性能较差。截至目前,国内外尚未见下视阵列3维SAR的3维场景成像结果公开发表。
3.2 阵列干涉SAR 3维成像系统
针对下视阵列SAR 3维成像技术存在的问题,中科院电子所提出了阵列干涉SAR(Array InSAR)技术进行3维成像。阵列干涉SAR进行侧视成像,利用跨航向的阵列天线,基于多输入多输出技术(Multi-Input Multi-Output,MIMO)虚拟多个天线等效相位中心,通过接收地物回波获取多通道相干SAR图像,一次飞行即可得到多角度观测数据,可以实现单次航过3维成像,相干性好、时效性强。相比下视阵列3维成像技术,阵列干涉SAR 3维成像采用侧视工作模式,测绘带更宽;等效相位中心数量远小于下视阵列系统,系统复杂度较低,具有更高的稳定性和易实现性;距离向分辨率更佳,重建点云密度高,3维成像性能相对优秀。阵列干涉SAR 3维成像原理如图9所示。

图8 全球阵列SAR 3维成像系统Fig.8 Global array 3D imaging systems

图9 阵列干涉SAR 3维成像示意图Fig.9 Diagrammatic sketch of Array InSAR 3D imaging
中科院电子所[47,48]2005年开始研制阵列干涉SAR系统,采用长2 m重150 kg的刚性天线阵来保证基线的稳定性,通过毫米级的基线高精度定标、以及基于阵列图像匹配干涉和逐像素3维解算的3维成像处理方法,于2015年获得了国际首幅3维场景成像结果。该系统融合了多通道的分辨能力和相干测量的高精度两项优势,可以实现叠掩等复杂场景的3维重建,弥补了常规InSAR技术的缺陷,拓展了SAR测绘技术的应用范围。
3.3 阵列干涉SAR技术特点
阵列干涉SAR技术利用阵列天线单次航过实现3维成像,解决了层析SAR观测周期长、下视阵列测绘效率低等问题,但是也面临3个核心技术难题。第一,阵列干涉SAR高程向分辨能力源自角度分辨,根据雷达分辨理论,分辨率与天线尺寸成反比,分辨率越高,天线尺寸越长,要实现1 m的3维成像分辨率,需要约20~50 m的机载雷达天线,工程上难以实现,成为制约高分辨率3维成像的核心难题;第二,阵列干涉SAR系统基于MIMO原理,为了增加等效通道数量,多个通道同时发射同时接收信号,多路信号之间会产生严重的干扰和混叠,传统正交编码方法无法有效抑制此干扰,也是制约阵列干涉SAR性能的瓶颈问题;第三,阵列干涉SAR 3维成像对相位精度要求高,需要阵列天线相对形变小于1 mm,而在航空条件下,受到飞机震颤以及侧风等影响,分布式阵列天线柔性形变量达到厘米量级,导致多通道信号之间的相参性被破坏,无法实现高精度3维成像。
为了解决上述问题,中科院电子所研究团队提出了系列解决方案。
针对阵列天线长度有限导致高程向分辨率低的问题,提出了阵列干涉3维超分辨成像方法。对叠掩问题进行了详细分析,根据连续地形叠掩场景的特点发明了一种基于曲线模型约束的超分辨方法。将连续自然地形表述为分段曲线模型,将传统基于相关匹配滤波的目标分辨成像问题,转化为曲线模型参数的最优估计问题[47]。利用分段曲线参数满足稀疏化条件,可实现超分辨参数估计的特点,通过求解阵列雷达观测方程,实现小尺寸天线条件下的3维超分辨成像。阵列干涉SAR 3维超分辨成像方法原理见图10。
具体实现上,首先提出了自适应分段曲线划分方法,根据雷达回波2维空间谱确定的地物分辨率,进行最优的分段曲线划分。进一步,由于叠掩地形曲线可以表示为距离r关于斜高s的函数,且曲线上的点有3个信息即散射系数幅度、相位以及坐标,提出了基于地形2阶导数最小化约束的阵列雷达观测模型,首次在观测模型中引入了连续地形空间相关性约束,优化目标函数为
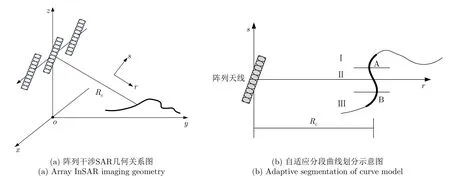
图10 阵列干涉SAR 3维超分辨成像算法原理示意图Fig.10 Diagrammatic sketch of Array InSAR super-resolution imaging algorithm
式(3)包含两层含义,一是求解的空间谱尽量接近测量值,二是使曲线尽量满足先验知识,即曲线尽量平滑,算法详细说明见文献[47]。通过在阵列干涉SAR观测模型中引入的连续地形空间相关性约束,结合最优化求解方法可以大幅提升3维分辨性能,相比传统方法,高程分辨率理论上可提高50倍,工程上提高了10~20倍。即采用2 m的天线,可获得20~40 m天线的分辨率。利用传统谱估计方法和阵列超分辨成像算法得到的3维成像结果对比见图11,从图11(b)和图11(c)的对比中可知,由于阵列天线尺寸受限,传统成像方法高程向分辨率低,阵列干涉超分辨算法则有效解决了这个问题,有效提升了3维成像质量。

图11 传统成像算法与阵列超分辨算法原理及效果对比Fig.11 Comparison of principles and performances between traditional methods and Array InSAR imaging method
针对阵列天线多通道信号之间干扰的问题,文献[49-52]提出了MIMO阵列雷达正交信号编码方法,在时频2维编码的基础上,利用阵列天线运动形成的空间维度,增加了空间相位编码,采用多维滤波模型,在空时频3维空间实现了多个混叠回波的解调分离(见图12),将混叠抑制比从-10 dB提高到-38 dB,图像质量显著提高(如图13)。针对分布式阵列天线随飞机震颤产生弹性形变的问题,文献[53]发明了一种刚柔组合的柔性基线测量和补偿方法,原理见图14。首先用惯性测量系统实现1 cm精度的天线基线刚性段测量,据此反演出3维地形初值,并利用地面控制点计算出与实际高程的偏差,精密反演出惯性测量系统的内置误差,进一步利用多基线干涉模型精确反演出每个阵列节点的柔性形变量,最终能够实现优于1 mm的天线形变测量和补偿。
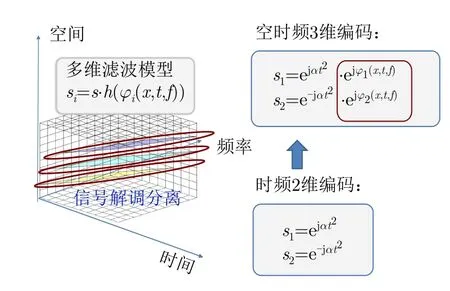
图12 空时频多维信号波形编码方案原理示意图Fig.12 Diagrammatic sketch of multidimensional waveform coding
2015年,中科院电子所研制成功国际上第1部阵列干涉3维SAR系统,见图15。该机载雷达系统采用侧视工作模式,共10个阵元2发8收,跨航向形成16个通道,等效相位中心均匀分布。系统工作于Ku波段,采用调频连续波体制,发射信号带宽500 MHz,测绘带宽度达到34 km。同年,在山西地区开展了大量飞行试验,国际上首次实现了基于机载阵列的大面积复杂城市3维成像。图16展示了针对独栋建筑的阵列干涉SAR 3维重建结果。如图16所示,原始SAR图像中叠掩现象严重,地面、建筑侧面与顶面3个部分难以分辨,利用阵列干涉SAR 3维成像方法能够将叠掩的3部分进行区分,最终得到了基于建筑物3维模型约束的SAR 3维成像结果。从该图中可以看到楼前地面的散射信息,楼前台阶、水泥路面,楼体侧面的纹理信息,窗户、玻璃幕墙和雨罩等结构,以及建筑的二面角反射等特征。图17则展示了整个小区的SAR图像以及阵列干涉SAR 3维成像结果,可以看出,小区3维结构清晰,证实了阵列干涉SAR的高精度城市3维成像能力。

图13 多维信号波形正交编码成像结果对比图Fig.13 Comparison between traditional and multidimensional orthogonal waveform imaging results

图14 刚柔组合的柔性基线测量和补偿方法原理示意图Fig.14 Diagrammatic sketch of flexible baseline measurement and compensation algorithm
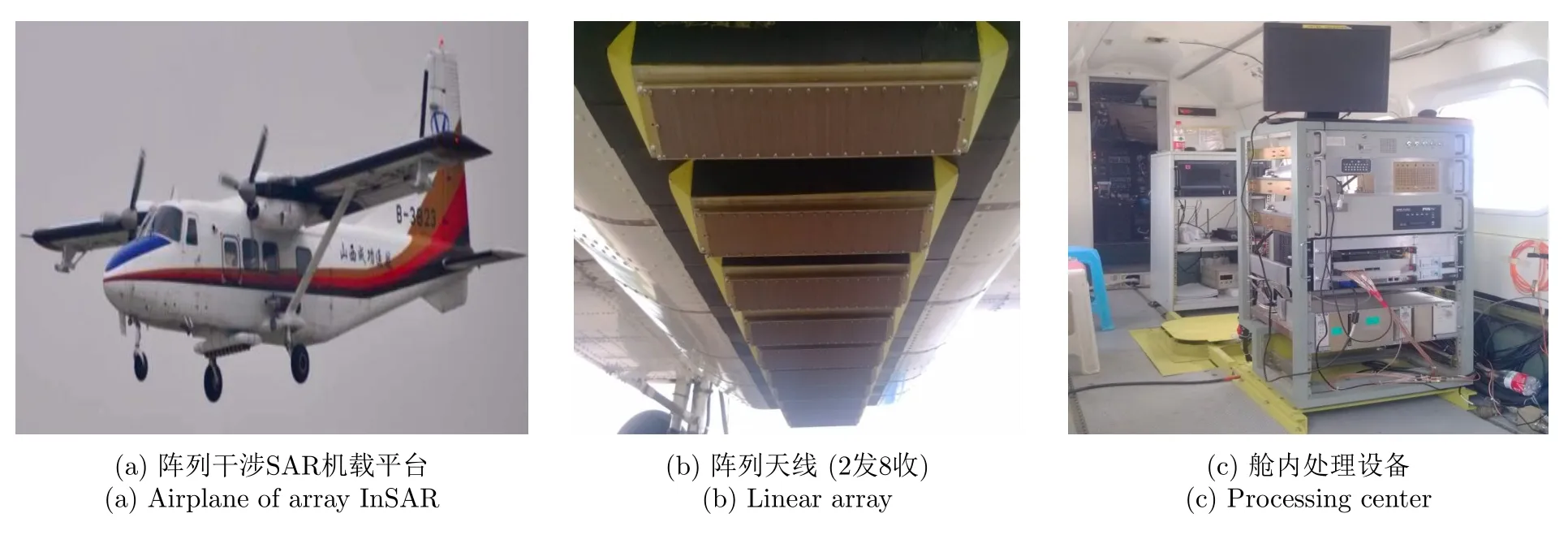
图15 中科院电子所阵列干涉SAR 3维成像系统Fig.15 Array InSAR 3D imaging system by IECAS
4 SAR微波视觉3维成像技术
由上可见,目前国内外提出的TomoSAR以及阵列干涉SAR 3维成像技术体制,由于需要在高程向构建等效阵列,至少需要十余个飞行架次或天线阵列,导致在实际应用中,在轨卫星实现难、推广应用难、小型化难。因此,如何降低TomoSAR和阵列干涉SAR 3维成像所需阵列或重轨观测的数量,成为SAR 3维成像领域的核心难题。
为了解决上述问题,需要挖掘新的信息来源。实际上SAR 2维图像中蕴藏着3维信息,经过一定训练的SAR图像判读人员观察SAR图像能够很强烈的感知其中的3维信息,尤其对于SAR图像中建筑、桥梁等先验知识比较丰富的3维目标。此外,SAR回波散射机制中也蕴藏着3维信息,通过散射机制的提取和参数反演,具备对散射中心结构一定的判断能力。因此,本文提出能否将SAR 2维图像和回波信号中的信息充分挖掘提取,成为新的信息来源,与合成孔径雷达成像机理相结合,实现3维成像,同时降低对阵列通道数和重轨观测次数的需求。这便是本文提出的合成孔径雷达微波视觉3维成像的基本思路。

图16 独栋建筑阵列干涉SAR 3维成像结果Fig.16 Array InSAR 3D imaging results of a single building

图17 阵列干涉SAR小区场景3维重建结果Fig.17 3D imaging results by array InSAR of the observed scene
4.1 SAR微波视觉3维成像的概念
SAR微波视觉3维成像,是指将雷达回波和2维图像中隐含的3维线索,通过微波散射机制(微波)和图像视觉语义(视觉)挖掘的方法加以提取,并引入到传统的SAR成像方法中,从而降低所需多角度观测的数量,实现高效的3维成像技术。SAR微波视觉3维成像,融合了计算电磁学、计算机视觉以及雷达信号处理相关理论,是一种新的SAR 3维成像技术路线。
SAR微波视觉3维成像,相较传统3维成像方法,主要有以下特点。第一,SAR微波视觉3维成像方法从回波出发,建立目标部件3维结构和回波之间的3维散射映射关系,并构建目标3维散射机制的结构化参数表征,增加目标3维重建信息量。第二,现有SAR 3维成像方法逐像素孤立解算,而SAR微波视觉3维成像则结合计算机视觉方法提取图像中的语义信息对第3维重建增加约束,减少所需观测数。
SAR微波视觉3维成像技术与传统成像技术在信息来源、分辨机理等方面均有所不同,具体对比如表1所示。SAR的距离维分辨,分辨机理是时间分辨,信息来源是频率扩展,处理方法是脉冲压缩;方位维分辨机理是角度分辨,信息来源是空间扩展,处理方法是合成孔径;现有技术的高度维分辨,其机理也是角度分辨,信息来源是空间扩展,处理方法从根本上讲依然是合成孔径。本技术SAR微波视觉3维成像,信息来源引入了散射机制和视觉语义,处理方法是SAR微波视觉3维成像这一新手段。可见,该技术与现有技术有实质的不同,是一种全新的技术思路。
4.2 SAR微波视觉3维成像的核心科学问题
为了实现SAR微波视觉3维成像的目的,需要挖掘SAR回波及2维图像中所蕴藏的3维信息。针对上述目的,虽已有一些研究基础,包括基于SAR图像内容提取目标3维信息的方法[54-56]和基于SAR信号散射机制提取的目标3维信息反演方法[57-59]等,但上述方法仍有较大的局限性,难以满足复杂场景SAR微波视觉3维成像的需求。总结而言,作为一种全新的3维成像方法,SAR微波视觉3维成像需进行理论与方法的探索性研究,主要包括3个核心科学问题,分别是:微波3维散射机制及其逆问题,SAR图像视觉3维认知理论与方法,以及基于微波视觉的3维成像理论与方法。
(1)微波3维散射机制及其逆问题
微波3维散射机制及其逆问题是要解决如何从SAR回波数据中识别出微波散射机制,从一定程度上重构目标3维认知参数的问题。根据散射机制反演目标结构是一个电磁散射的逆问题,如图18,由于实际目标的电磁散射机制复杂,目标散射特性及其在SAR图像的成像特性与其几何物理参数(外形、材质等)、波形参数(频率、极化等)、观测条件(角度、模式等)等多个因素相关,因此,电磁散射逆问题存在多解性、收敛性、鲁棒性等问题。3维散射机制是目标微波视觉的重要信息,3维散射机制的识别是实现SAR微波视觉3维成像的核心科学问题之一,需要解决散射机制的检测识别、目标3维认知参数的反演与估计等理论方法问题[60,61]。

表1 SAR微波视觉3维成像与传统成像技术的对比Tab.1 Comparison between SAR microwave vision 3D imaging and traditional 3D imaging techniques

图18 电磁散射求逆问题示意图Fig.18 Diagrammatic sketch of inverse problem of electromagnetic scattering
(2)SAR图像视觉3维认知理论与方法
SAR图像视觉3维认知理论与方法是解决如何理解SAR图像中的视觉语义并提取出典型目标的3维结构,挖掘出3维线索的问题。
针对光学图像,基于计算机视觉的图像理解和目标3维重建的研究已经比较成熟,已有研究可通过单幅光学影像进行3维重建[62]。但SAR与光学成像机理存在显著不同,如图19。首先SAR与光学的成像几何不同,光学是角度投影,有遮挡无叠掩、有角度信息无深度信息;而SAR是距离投影,有遮挡同时又有叠掩、无角度信息而有深度信息。第二,SAR与光学的电磁散射机理不同,光学是非相干成像,图像符合人眼视觉习惯,图像平滑、对观测角度不敏感,容易获取大量学习样本;而SAR是相干成像,图像相干斑噪声严重、随观测角度变化剧烈,很难获取大量学习样本,导致现有光学图像解译的方法应用于SAR图像视觉语义理解时,鲁棒性弱、泛化能力差等问题非常突出。因此,目前主要针对光学图像的计算机视觉理论方法无法直接照搬应用于SAR图像视觉理解,需要创新性地发展SAR图像3维特征挖掘、目标表征和识别等理论方法,建立SAR微波视觉3维成像的视觉认知基础。
(3)基于微波视觉的3维成像理论与方法
基于微波视觉的3维成像理论与方法是要解决如何根据3维线索信息,高效精确地进行3维成像的问题,即:如何将微波散射机制和视觉语义与传统的SAR信号处理方法相结合,实现复杂环境和目标的3维成像,如图20。

图19 SAR成像与光学成像的区别Fig.19 Differences between SAR and optical images
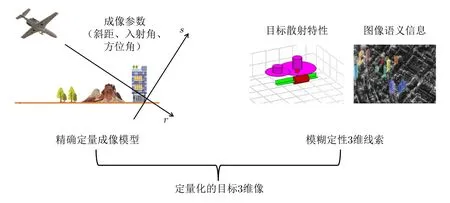
图20 基于微波视觉的3维成像概念Fig.20 SAR microwave vision 3D imaging
通过“微波视觉”[63]一般获得的是异构、模糊、定性的3维线索,如何将异构定性的3维线索与定量化的SAR成像方法相结合,实现精确定量的3维成像,是必须解决的一个理论问题。现有SAR 3维成像技术需要大量多角度观测,核心原因是SAR图像方程中的高度维参数的解空间巨大,少数观测无法获得参数的唯一精确解。如果加入微波散射机制和图像视觉语义信息等约束条件,可有效缩小解空间范围,从而精确确定高度方向的各项参数,实现3维成像[64]。因此,需要创新构建SAR微波视觉3维成像理论框架,解决图像语义与微波散射机制的约束模型构建、异构非线性SAR 3维成像方程最优化求解等难题,发展基于微波视觉的3维成像理论与方法。
初步技术思路如下。根据SAR成像方程,如式(4)

该等式为某次观测下SAR图像方程中复数据表达式,其中Rj是斜距,ηj对应方位向慢时间,λ是雷达工作波长,σi对应等距圆弧上第i个散射中心对应的散射系数,ϕi为该散射系数的相位,hi为该散射中心的高度,N为该等距圆弧上叠掩的散射中心的个数,如图21所示。

图21 SAR图像中某叠掩像素的信号表达式Fig.21 Signal model of the overlapping pixel
在现有的稀疏3维成像算法中,对σi有稀疏性假设,但对σi和高程hi没有约束条件,解空间很大,在少量观测下无法满足求解条件,故对多角度观测的数量有较高要求。本技术思路在综合考虑目标散射特性与SAR图像语义信息的情况下,引入视觉语义和散射机制的约束,缩小求解空间,如式(5)所示,

其中,hi ∈f(h,x)表示根据微波视觉推断得到散射中心位于某条曲线上,N ∈{K}表示叠掩的散射中心数量具有先验知识,(|σi|,ϕi)∈{|σK|,ϕK}表示散射中心的取值具有一定先验知识,通过联立上述方程组实现求解。此外,如微波视觉获得的约束无上述显式表达,还可基于散射机制和视觉语义中挖掘的目标几何基元对应像素间的连续性约束、待求参数符合一定先验分布等建立约束模型,采用多约束压缩感知以及深度神经网络来实现复杂多约束下逆问题的优化求解。
5 结束语
合成孔径雷达3维成像技术可以直接获得目标的3维电磁散射结构,在城市测绘和灾害评估等领域发挥了重大作用。本文回顾了合成孔径雷达3维成像技术的发展,详细介绍了TomoSAR以及阵列干涉SAR的技术体制和特点,指出现有3维成像技术受限于理论制约,系统复杂度高或成像周期长,限制了其大规模推广应用。
针对上述问题,本文提出了SAR微波视觉3维成像理论方法,针对现有3维成像方法中并未利用的微波散射机制、图像视觉语义等含有的3维信息,利用计算电磁学、计算机视觉等相关理论方法加以提取,并将其表达成对SAR信号处理的约束条件,实现3维信息的馈入,大大降低3维成像对空间扩展观测数量的依赖,最终实现少量观测下的SAR 3维成像,为SAR 3维成像技术发展开辟了新的方向。目前,SAR微波视觉3维成像的研究尚处于理论探索阶段,需要进一步开展相关研究,推进SAR 3维成像技术的发展。