一种线性调频连续波雷达多门限联合检测方法
2020-01-07张远安
马 可 张远安 毕 进
(西安电子工程研究所 西安 710100)
0 引言
线性调频连续波(Linear Modulation Continuous Wave,LFMCW)雷达[1]是一种以线性调频连续波作为发射信号的雷达,其具有测速测距精度高、无近距离盲区、发射功率低、结构简单、体积小等特点。近年来,随着技术的发展连续波雷达在很多系统中都有应用,如高度仪,汽车防撞系统、战场场面监视、导弹精密末制导等[2]。
雷达为了得到超低的虚警率和漏警率,可以从信号检测、航迹滤波、目标特性分析等多个方面综合实现[3]。本文针对LFMCW雷达回波特点,从信号检测方面入手,通过实测数据分析,提出了一种多门限联合检测方法,该方法可以在保证目标检测概率的同时降低虚警率。
1 LFMCW雷达回波分析
在本文中,LFMCW雷达采用锯齿调频连续波作为发射信号,其回波经过混频、滤波、放大后进入信号处理器,通过对差拍回波信号的距离维和多普勒维做二维快速傅里叶变换(Fast Fourier Transform,FFT)[4],并进行信号检测和距离速度解耦合,就可以得到目标的距离、速度信息。
连续波雷达发射信号泄漏的相位噪声会影响接收机灵敏度[5]。对于信号检测,其噪声为接收机噪声加发射信号泄漏边带噪声。这会导致接收机输出噪声的统计特性不是平稳的。图1为某发射信号的相位噪声测试结果。可以看出发射信号的相位噪声随频率偏移呈快速下降趋势,偏移到一定频率时呈稳定状态。

图1 相位噪声测试结果
在连续波雷达工程设计时,通常需要在接收链路中增加频率灵敏度控制(Sensitivity frequency control,SFC)[6-7],以扩大接收机动态范围、抑制噪声近频率端起伏。图2为某接收机SFC频率响应曲线。
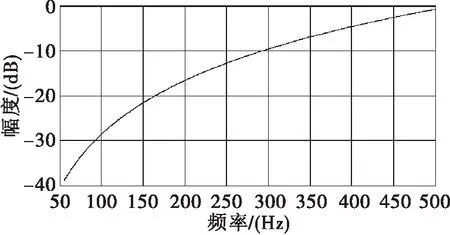
图2 SFC频率响应曲线
对于LFMCW雷达,在信号检测时门限需要适应接收机输出噪声(即接收机本地噪声与发射信号泄漏的边带噪声之和)、无意干扰、以及强地杂波在二维FFT后的副瓣。图3给出了LFMCW雷达在不同环境中信号检测前的实际采集噪声基底。
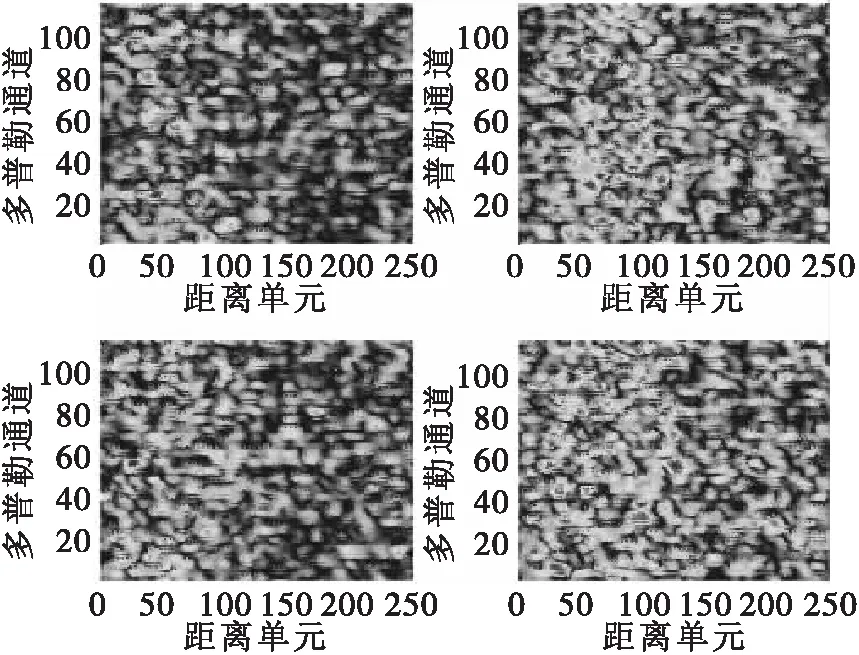
图3 实际采集噪声基底
由图3可以看出,在不同环境下LFMCW雷达的噪声基底不同,但在近距离单元段其噪声整体较强,同时伴随有个别噪声尖峰点。这种噪声尖峰点会导致雷达的虚警率较高。因此,在目标检测时,应该考虑如何在不同噪声基底下降低噪声尖峰点对目标检测的影响。
2 LFMCW雷达多门限设计
通常情况下,雷达中的多门限检测设计思路是先设置较低的第一门限保证检测概率,再根据雷达特点增加其他门限以降低虚警率[8]。针对LFMCW雷达,根据不同的实际数采噪声基底,结合恒虚警门限和固定门限,以实现较低的虚警率和漏警率。
2.1 恒虚警门限设计
恒虚警检测[9-10]的主要目的是以恒定的虚警概率从回波信号中检测出目标信号而不受背景噪声基底变化的影响,并为后续的距离速度解耦合消除噪声。由图3可知,噪声基底中的强杂波点只存在于一定的距离和多普勒通道内,对这些含有强杂波点的噪声基底平均值进行估计时不能在许多次扫描周期内进行,同时由于噪声基底不是均匀的,也不可能在一次距离全频段内进行,而只能在检测点临近单元。因此,在LFMCW连续波雷达中我们采用邻近单元平均选大的方法进行恒虚警检测(Greatest of Constant False Alarm Rate,GOCFAR),其检测原理如图4所示。

图4 GOCFAR原理图
在图4中,测试单元前后邻近的几个单元为保护单元,保护单元的大小取决于目标的尺寸和分辨单元的大小,保护单元是为了防止目标能量泄漏到相邻参考单元中影响背景噪声基底功率估计。保护单元外侧为参考单元,前后参考单元长度相等,噪声基底功率估计由参考单元求平均获得。GOCFAR是选择前后参考单元均值中的较大值作为噪声基底功率估计。门限系数是根据设定的恒虚警概率和恒虚警算法得出,将门限系数与噪声基底功率估计相乘与测试单元比较,进行门限检测判决。
2.2 基于统计的多门限设计
根据不同环境下LFMCW雷达实际采集噪声基底,统计出噪声尖峰幅度值的分布,选取合适的固定门限,以减小噪声尖峰带来的虚警。
通过对不同环境下LFMCW雷达工作时采集800个相参处理周期(Coherent Processing Interval,CPI)内的环境数据进行分析,将800个CPI数据进行平均得到如图5所示的结果,不同场景下噪声基底随着探测距离的变化曲线。
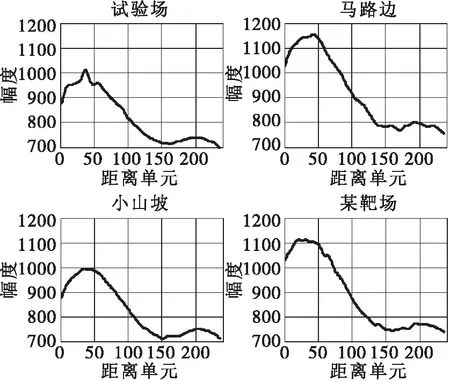
图5 不同环境的平均噪声基底
雷达在不同环境工作时,理想的方法是先通过让雷达自主学习,探测环境回波信号,获得该环境下噪声基底随距离单元变化曲线,将该曲线存入雷达检测模块中,用作检测时的固定门限。但是在工程实践时,这种方法比较困难。这是因为雷达信号处理器常采用FPGA或者DSP来实现,要计算上百个CPI内的噪声基底,从存储资源上,往往难以满足,但从图5可以看到,不同环境下,噪声基底随距离的变化曲线规律很类似,也即可以通过试验场环境来代替其他环境下的噪声基底,前期试验时,通过试验场采集雷达正常工作时的数据进行分析,通过脱机处理获得噪声基底随距离单元的变化曲线,作为固定门限,存入FPGA或者DSP中,这在工程中是很容易实现的。
因此,在LFMCW连续波雷达的信号检测中,我们采用恒虚警门限与基于统计的固定多门限联合检测方法,以期降低虚警率。
3 多门限联合检测实测结果
以某型LFMCW雷达为例,在不同环境下采集模拟目标数据,设置不同的门限,利用MATLAB处理数据,可以得到不同的目标检测结果。
图6为某次模拟目标由远向近运动所采集的数据,选取目标运动中间的140个信号处理周期,仅设置单一恒虚警门限的目标检测结果,其中横轴为信号处理周期,纵轴为距离单元,*点为对应信号处理周期检测出的目标所在距离单元位置。
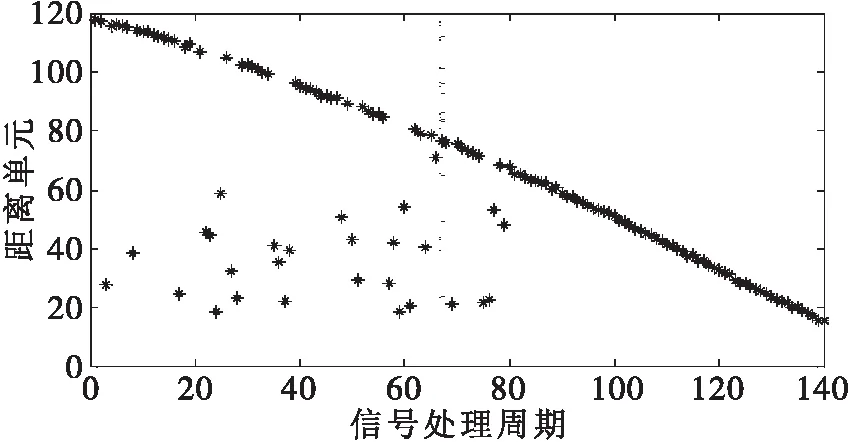
图6 单一恒虚警门限检测结果
在图6中,可以清晰地看出模拟目标随信号处理周期变化的运动轨迹。在目标距离较远时,近距离单元有较多杂波点产生。经过统计,140个周期内,目标检测点111个,杂波点29个。
图7为与图6相同数据,设置上节所述设置多门限后联合检测的结果。

图7 多门限联合检测结果
在图7中,也可以清晰地看出模拟目标随信号处理周期变化的运动轨迹,且近距离单元段经过高固定门限和恒虚警门限的限制后,杂波点仅为2个。这2个杂波点是由某个较高的噪声尖峰产生,如果消除这2个杂波点,将设置更高的门限值,这会导致目标检测概率降低,漏警率较高。经过统计,在140个周期内,目标检测点为107个。
表1统计了在单一恒虚警门限与多门限联合检测情况下,6次模拟目标在不同环境,不同信号处理周期数的目标检测点个数、杂波点个数。
表1 检测点个数对比
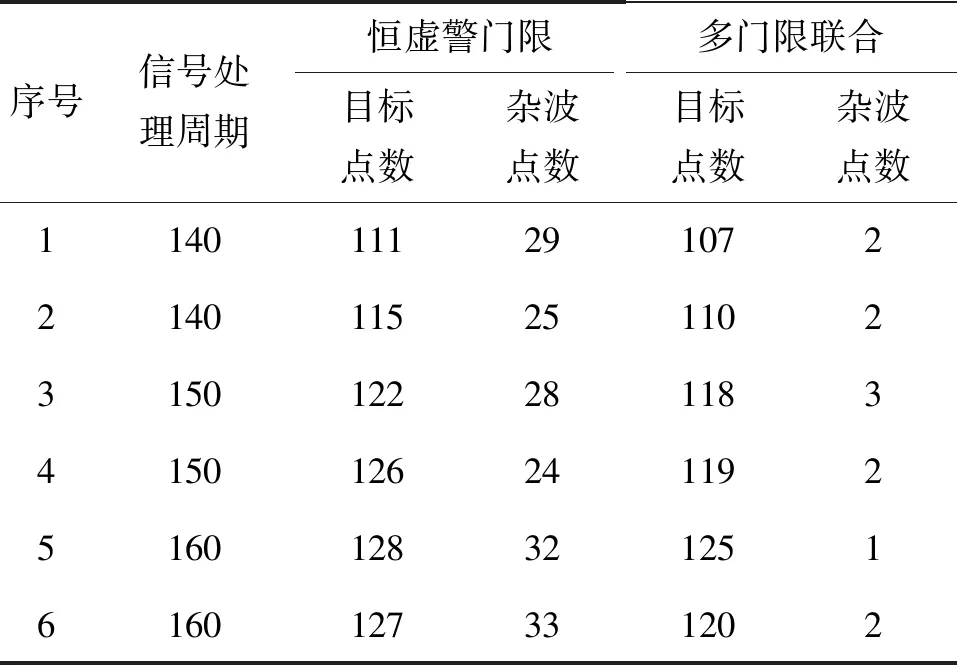
序号信号处理周期恒虚警门限多门限联合目标点数杂波点数目标点数杂波点数114011129107221401152511023150122281183415012624119251601283212516160127331202
通过表1可以看出,LFMCW雷达对于模拟运动目标的检测时,多门限联合检测的检测概率略低于单一恒虚警门限的检测概率,通过后续数据处理航迹滤波可以忽略这种影响。同时多门限联合检测可以大大降低杂波点引起的虚警。杂波点较少对雷达后续的数据处理能够起到积极作用。
4 结束语
LFMCW雷达需要在含有接收机本地噪声、发射信号泄漏的边带噪声、无意干扰、强地杂波副瓣等噪声基底中检测目标,根据实测数据中噪声基底的统计,提出了一种恒虚警与基于统计的固定多门限联合检测的方法。该方法实现简单、并通过实测模拟目标数据验证,在略微牺牲检测概率的情况下可以有效减少噪声尖峰带来的虚警。这种方法已经在某型LFMCW雷达上得到了工程应用。
