星载蓝绿激光用于水下导航定位的方法探讨
2020-01-02徐文霞左莉华张爽娜魏婵娟
徐文霞 左莉华 张爽娜 魏婵娟
(1 国防科技大学,长沙 410073)(2 中国空间技术研究院,北京 100094)(3 航天东方红卫星有限公司,北京 100094)(4 航天恒星科技有限公司,北京 100094)
随着科技的发展,水下航行器在国民经济的各个领域均得到广泛应用,根据任务需求,一般需要其具有较长时间的潜航和水下待命能力,因此,对水下导航定位精度提出了较高的要求。当前水下导航的主要方法可分为4类: 航位推算导航、惯性导航、声学导航和地球物理属性导航。航位推算导航以及惯性导航的定位精度存在推测误差,随着航行距离及时间的增加,误差逐渐增大,即使目前精度最高的激光陀螺,一个月累积误差也将达到1~2海里(1.8~3.6 km),需要使用绝对位置进行校准。目前水下航行器获取绝对位置的方式主要依赖水声导航或全球导航卫星系统(GNSS),水声导航需要布置水下基站或浮标基站,灵活性差且维修回收困难,在未预设海域无法完成绝对位置校准,上浮至海面获取GNSS信号可以获取精确的位置和时间信息,但需要浮出水面。地球物理属性导航需要事先获取地球物理属性数据,形成数据库,待水下航行器到达相应海域后进行匹配处理,可使用的导航海域及导航精度受到数据库的限制,在缺少数据的海域无法进行匹配定位[1-2]。上述传统导航定位手段由于各自的局限性,均无法满足现有航行器的长时间持续水下任务的高精度定位需求,蓝绿激光应用于水下导航技术应运而生,其水下定位精度较传统方式有了实质性提高。
蓝绿激光优良的透水性能被用于水下航行器通信,其可行性已通过陆基、空基与水下通信试验得到了充分的验证。实验数据显示:不同波长的光波在海水中的传输特性各不相同,光波在海水中传播时蓝光、绿光具有明显的窗口。在浅水区的浑浊地带,采用绿光进行水下探测,每米透光度可达82%;在水质较好的洋流深处,采用蓝光探测,每米透光度可期达95%以上[3]。本文针对星载蓝绿激光用于水下导航定位的方法、影响定位精度的因素和精度进行探讨。
1 星载蓝绿激光用于水下导航定位方法
1.1 定位原理及伪距测量方法
通常采用多颗中低轨卫星发射蓝绿激光覆盖水下航行器所在海域,可实现特定海域水下航行器无源导航定位,导航定位系统如图1所示[4]。
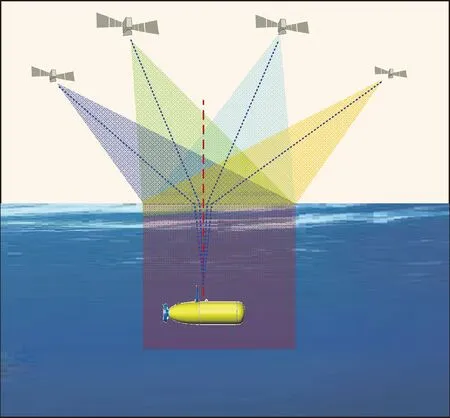
图1 中低轨卫星蓝绿激光导航定位系统示意
卫星在轨通过接收GNSS信号实现自身位置及时间的精确测量,并将自身的位置及时间信息调制至星载激光信号中向水下航行器发射,水下航行器通过同时测量与3颗卫星之间的伪距,计算当前自身位置和钟差。
已知:
(1)
式中:上角标j=1,2,3是卫星编号;ρ是对卫星的伪距测量值;∂tu为接收机钟差,u为用户天顶方向位移变化;∂t为卫星钟差;I,T分别为电离层和对流层延迟;R,M分别为水面折射和水下多径造成的测距误差;ερ伪距为测量误差;r是与卫星间的几何距离。
r(j)=‖X(j)-X‖=
(2)
式中:X=[xyz]T为未知的接收机位置坐标向量,X(j)=[x(j)y(j)z(j)]T为卫星j的位置坐标向量。
式(1)中的∂t(1),I,T,R,M均可通过模型求得,定义校正后的伪距测量值ρc为
ρc=ρ+c×∂t-I-T-R-M
(3)
不同卫星的伪距测量值为:
(4)
式中:接收机位置(x,y,z)和接收机钟差∂tu是所要求解的未知量。水下导航测量,水下平台移动速度很慢且高程方向有水深计参与测量,用户天顶方向位移变化很小,则
Δu=0
(5)
结合站心坐标系与WGS84坐标系的变换式
(6)
求解4个未知数[ΔxΔyΔz∂tu]T,迭代更新求出接收机的位置(x,y,z)即水下航行器的位置。
1.2 调制及复用方式分析
因海水对相位的影响太大,水下激光通信不宜采用相位调制,脉冲位置调制(PPM)典型的PPM信号如图2所示。
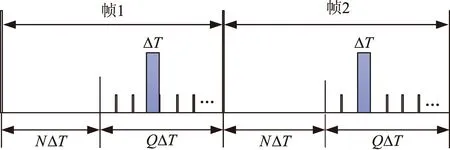
图2 典型PPM信号
一组完整的脉冲位置调制信号由若干帧组成,每帧信号由一个信息段和保护段共同组成。如果在通信时段的Q个时隙中存在一个发射脉冲,脉冲宽度为ΔT,光脉冲的个数为N,则可以将一帧周期看作一个光脉冲周期,帧频率取激光器的重复频率。保护段和激光器的自身特性相关,它是激光器重两次出光脉冲的最小时间间隔,用N个光脉冲的长度N×ΔT表示。可调制信息位数k由信息段时隙个数Q决定,k和Q满足以下的等量关系。
k=lbQ
(7)
在多脉冲调制过程中,激光脉冲和被传输的信息位置一一对应,通过对脉冲位置的识别可以解算出被传输的信息数据。
由图2可以看出,脉冲位置调制采用信息段中Q个时隙中的一个激光脉冲来传输信息,激光脉冲的周期为(Q+N)ΔT,其平均速率为
(8)
如果要进一步提高数据传输速率,可以在激光器的可调节范围内,增加信息时隙或减少保护时隙。
图3表示一个完整的脉冲位置调制序列。接收系统的起始以同步帧为标准脉冲,同步正确接收后续数据。同步帧的脉冲采用等时间间隔,可以需要通过软硬件修正收发双方之间由于时钟标准不同造成的时钟误差[4]。
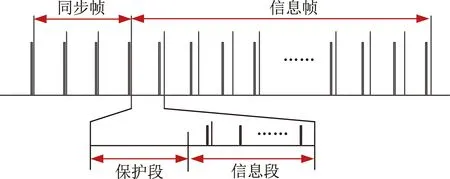
图3 完整的PPM通信脉冲序列
水下接收机同时接收多颗卫星的信号,为避免各个卫星信号之间互相干扰,一般采用码分、波分或者时分的方式实现多址播发,在PPM调制方式下,对可采用的复用方式进行分析[5]。
1)时分多址
各个卫星发射的激光脉冲信号相互之间在时间上分离,以保证接收端分时接收各个卫星的信号,不出现同时接收多颗卫星脉冲信号的情况,避免干扰。但是由于各个卫星与接收端的距离不定,采用时分多址需要各个卫星信号留出足够长的空余时段,通信速率会严重降低。
2)波分多址
各个卫星播发不同波段的激光信号,彼此采用不同的激光波长以避免互相干扰,接收机也需要能够同时接收处理不同波长的激光信号。各卫星激光器尽量选择相近的波段,以保证水下传播特性不存在较大差异,以及减小接收机带宽,避免影响定位精度及接收机灵敏度。
3)码分多址
采用PPM调制,在数据帧中填入每个卫星地址码,然后再调制激光脉冲的方式,无法起到多址的作用,只要接收机同时收到同频点的脉冲信号就会造成互相干扰,无法区分是来自于哪颗卫星的信号。
通过以上分析可见,多激光束水下导航定位信号宜采用PPM调制加波分多址。
2 水下航行器定位精度分析
2.1 伪距测量误差分析
卫星发射的蓝绿激光信号经过传播路径到达水下航行器,由水下航行器激光接收机接收处理,从而进行伪距测量计算,伪距测量精度的影响因素主要包括与卫星有关的误差、与信号传播有关的路径误差以及与接收端有关的接收误差等。卫星端主要包括卫星位置误差、卫星时钟误差;传播路径主要包括电离层延时修正误差、对流层延时修正误差、云层延时修正误差、水面折射;接收端主要包括水下多径、接收机噪声。
卫星与水下激光信号传输链路与空间信号传输链路最大的不同是激光信号通过空气与水面界面时,会发生折射,从而带来伪距测量误差,以下重点对水面折射引起的伪距测量误差进行分析。
由于折射作用,入水后的蓝绿激光传播方向靠近法向。入射角度与折射角之间的关系如图4所示;水面折射引起实际距离R0与测量伪距ρ′之间几何误差示如图5所示[6]。
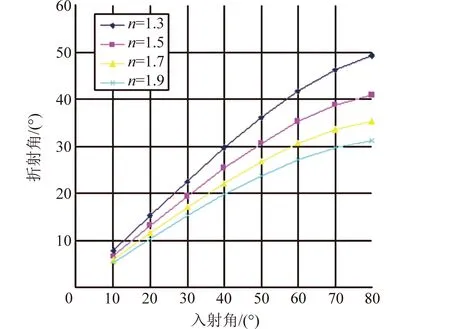
图4 大气/水界面激光入射角与折射角关系图
按照卫星高度H=820 km、水下航行器深度h=100 m,折射率n=1.34,估算不同入射角度α下水面折射引起的测距几何误差为
ΔR=ρ′-R0
(9)

根据式(9)分析得出入射角与测距几何误差关系如图6所示,随着入射角度的增大,水面折射引起的测距误差会增大,在入射角度不大于60°范围内,水面折射引起的误差小于7.7 m。
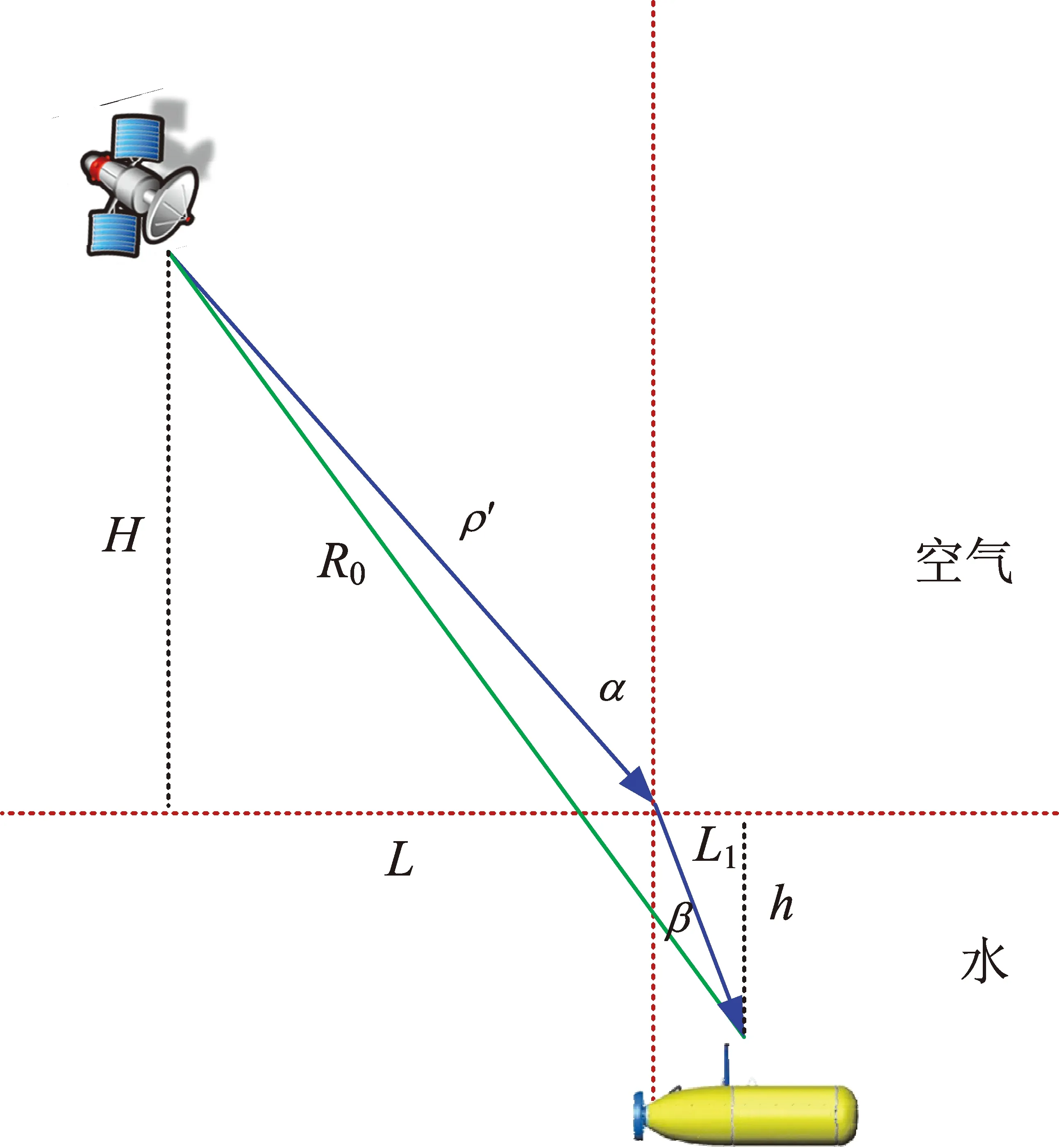
图5 水面折射示意图
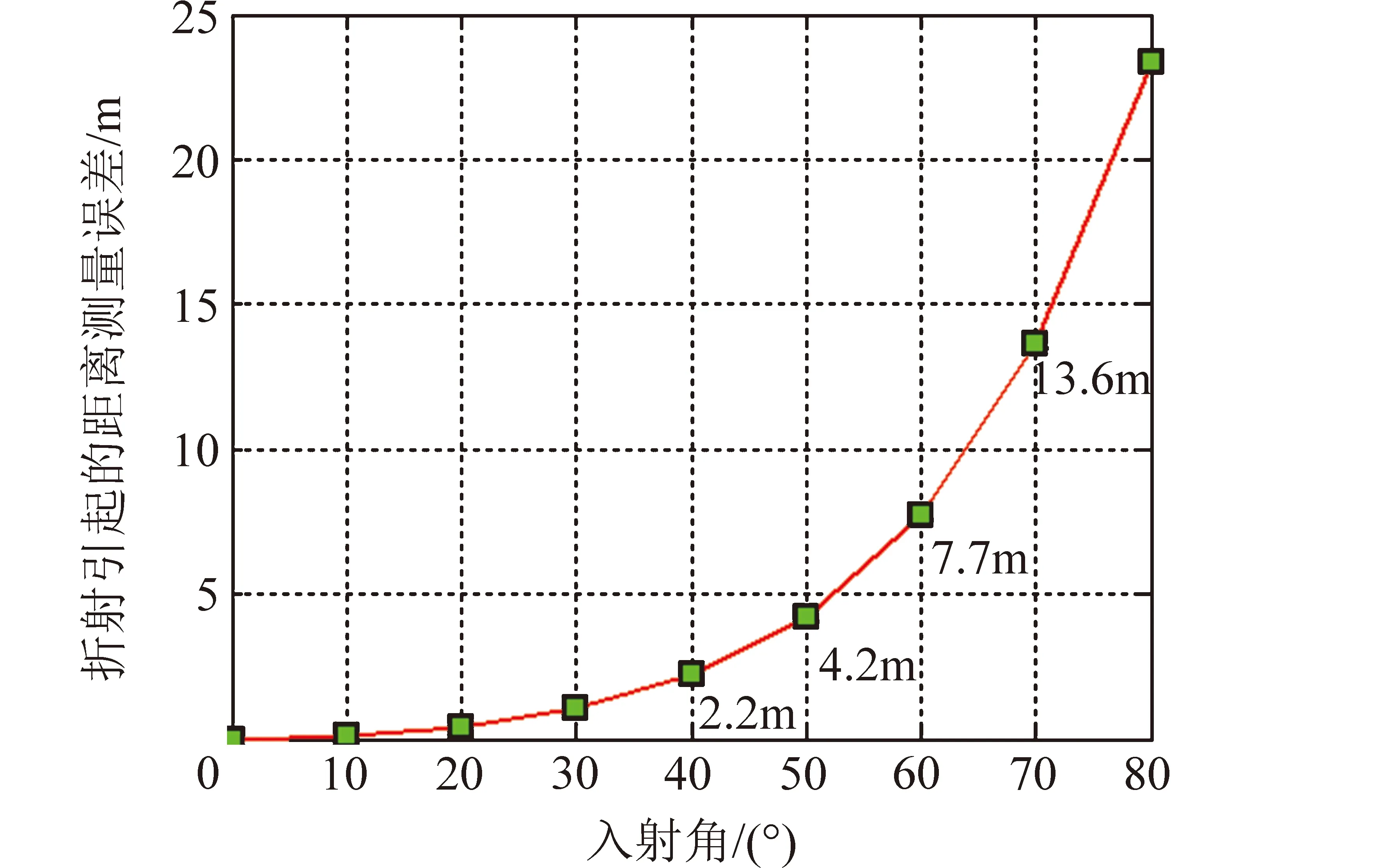
图6 入射角与水面折射测距几何误差关系图
结合目前正常天气情况下激光通信试验数据及部分卫星在轨验证数据,影响星载蓝绿激光水下导航伪距测量的各类误差如表1所示。根据误差性质的不同,上述误差又分为系统误差和偶然误差。系统误差无论从误差大小和对定位精度的影响都要大于偶然误差,在这些误差源中,有些可以用一定的方法来消除和减弱,有些则需要大量数据拟合修正。偶然误差主要是人为观测条件造成的,主要是观测条件不同等引起的多路径误差等,偶然误差具有随机性,可以通过观测改善观测条件来降低其影响[7]。
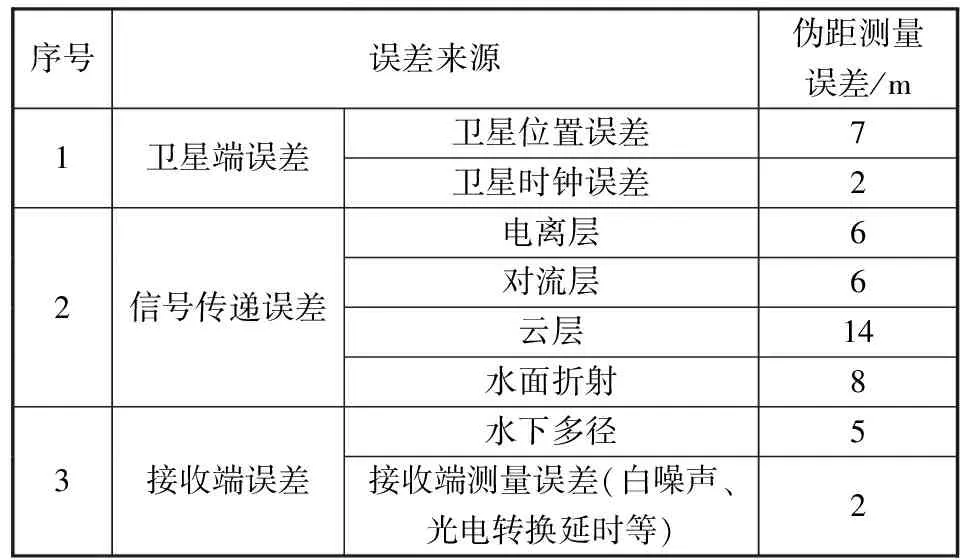
表1 误差对伪距测量的影响估算
2.2 卫星星座几何构型对定位精度的影响分析
卫星星座的几何构型直接影响定位精度,用位置精度强弱度ΕPDOP来表征卫星空间分布的几何强度,ΕPDOP为纬度、经度和高程误差平方和的开根号,其数值一般为0.5~99.9,数值越小表明其定位精度越高。
考虑利用最少数量的卫星对指定区域进行导航服务,仿真计算ΕPDOP值以及定位服务时长,以便评估导航定位精度以及实际应用的可行性。设计一个由3颗卫星组成的卫星星座,3颗卫星采用三角形编队飞行,卫星轨道为高度为820 km的太阳同步晨昏轨道,回归周期为5天。运行15天,3颗卫星发射的激光波束同时覆盖某水下指定区域的仿真计算,3颗卫星对指定区域进行导航定位服务的ΕPDOP值规律如图7所示(从协调世界时2017年12月7日计时),由仿真分析结果可以看出ΕPDOP值均小于4.7。

图7 三颗卫星对指定区域进行导航定位服务的ΕPDOP
每个回归周期内,3颗卫星同时可服务指定区域6次,其中有一次正过顶,持续时间最长为220 s,如图 8所示(从协调世界时2017年12月8日9:55计时)。对于每次过顶,ΕPDOP值呈中间低两头高的变化规律,过顶时段中心点对应的导航定位精度最高。
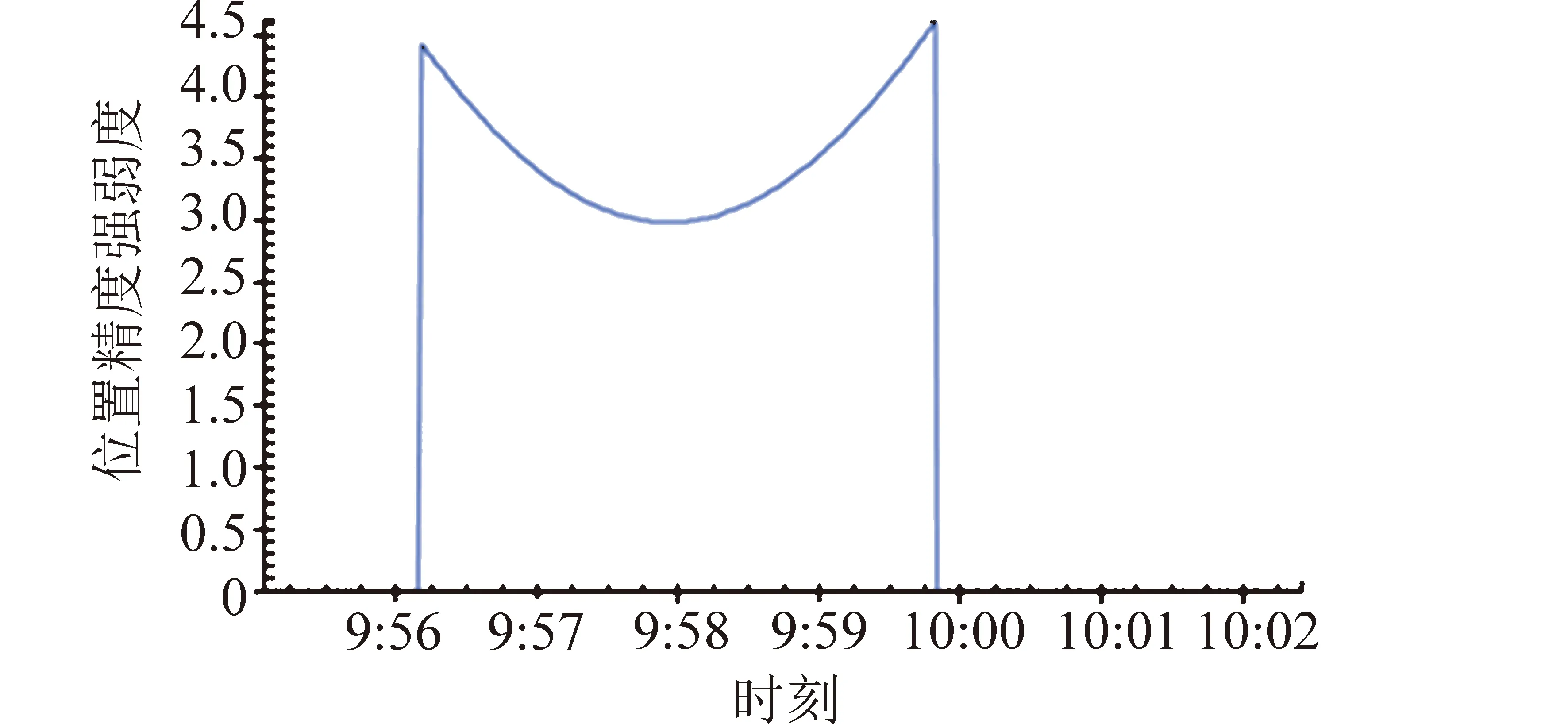
图8 3颗卫星同时服务指定区域时长(正过顶)及ΕPDOP
2.3 定位精度估算
综上所述,水下航行器的三维定位精度约为
σP=σ×ΕPDOP=95.4 m
(10)
3 结束语
本文提出了基于低轨卫星星座的蓝绿激光水下航行器导航定位方法,并对定位原理与方法、信号调制与复用体制等关键环节进行了研究,对定位精度影响因素进行了分解。研究结果表明:水下航行器与星座协同工作,采用PPM调制以及波分多址,可以避免不同卫星蓝绿激光信号之间的干扰,实现同时接收解调多星信号;通过伪距测量,可以在特定条件下获取其自身三维位置坐标。仿真计算结果表明:在3颗低轨卫星组成的三角形编队星座工况下,每个回归周期内,3颗卫星同时可服务指定区域6次,从而实现水下航行器三维定位精度优于百米,较传统千米级定位精度有了大幅提高。
本文仅探讨了3颗卫星组成的星座工况,水下航行器导航定位覆盖率较低,若要提高水下航行器的导航定位覆盖率,后续需设计较多卫星组成的星座开展更深入的研究。