基于主被动一体隔振指向平台的柔性航天器高精高稳指向方法
2020-01-02徐广德田蕾邓凯文吴冬梅张柏楠孙国童张永
徐广德 田蕾 邓凯文 吴冬梅 张柏楠 孙国童 张永
(1 中国空间技术研究院载人航天总体部,北京 100094)(2 北京跟踪与通信技术研究所,北京 100094)(3 中国空间技术研究院,北京 100094)
天文卫星、遥感卫星成像分辨率的提高给卫星的系统设计带来越来越大的挑战,在研的美国詹姆斯·韦伯望远镜(JWST)要求指向稳定度达到0.007″[1],在论证中的大型紫外-可见光-红外综合天文望远镜(LUVOIR)[2]更是要求指向稳定度不超过0.000 34″。为满足上述需求,一方面要保证超高低频稳定度;另一方面又要将星上运动机构产生振动引起的高频抖动控制在一定范围内。为提高低频指向稳定度,通常解决方法是在卫星姿态控制基础上,载荷内部引入一套稳像系统,通过快摆镜的两维摆动调节光线保证载荷指向稳定度,如JWST、欧几里得望远镜(Euclid)[3]等天文卫星。为抑制高频振动,通常的解决方法包括振源隔离和载荷隔振,以控制力矩陀螺(CMG)隔振和为相机隔振为例,隔振本质上是在CMG、相机与卫星本体之间引入柔性环节,隔振频率的选取与卫星姿态控制稳定裕度密切关联[4-5],导致指向控制和振动抑制相互制约,对卫星指向控制系统的设计带来新的挑战。
针对上述问题,国外自20世纪90年代开始就研究一种同时具备振动隔离和指向调节功能的Stewart平台,安装在有效载荷和卫星本体之间,可同时解决指向控制和振动抑制难题。随后,国内外针对这种平台开展了大量研究。美国弹道防御组织在1998年验证了红外望远镜的振动隔离抑制系统(VISS)[6],对红外相机进行主被动隔振和微操作。Mclnroy等通过在Stewart平台上安装光学指向敏感器[7-8],实现了对载荷的两轴主动指向控制及支杆失效后的冗余控制,但未对隔振问题进行研究。Thayer等利用一系列传感器[9],包括三轴力传感器,LVDT位移传感器以及有效载荷端和基础端检波器速度传感器,基于零极点配置的结构模型,采用多输入多输出(MIMO)控制方法研究了Stewart平台的主动隔振控制问题,未考虑指向控制问题。Geng和Hayes采用自适应FIR前馈控制方法最小化加速度以此实现Stewart平台的主动振动隔离[10]。在国内,李伟鹏等对国内外天基精密跟瞄Stewart平台进行了梳理[11],总结了一系列关键技术。杨涛等提出了一种Stewart平台的L2控制方法进行主动隔振[12],但不具备指向控制能力。王有懿等研究了超静平台隔振与指向一体化控制方法[13],通过加入模拟的高中低频扰动验证了一体化控制方法,但未考虑实际动力学模型。张科备等研究了Stewart超静卫星载荷和星体平台在姿态控制时存在平动和转动耦合问题[14],采用的动力学为刚体模型,未考虑柔性附件的影响。通过调研可知,虽然采用Stewart平台的隔振或指向控制问题已有不少研究,但具备振动隔离和指向调节能力的主被动一体隔振指向Stewart平台及在柔性航天器中应用少有研究。
本文研究主被动一体隔振指向Stewart平台在柔性航天器高精高稳指向中的应用,首先以简化模型对主被动一体隔振指向Stewart平台的原理进行了分析,随后采用混合坐标法建立了带Stewart平台和柔性附件的航天器动力学模型,分别设计了卫星本体的姿态控制器和载荷的主动隔振控制器、主动指向控制器,并通过数字仿真对带有主被动一体隔振指向Stewart平台柔性航天器的系统传递率进行了分析,对振动抑制性能和指向控制性能进行了仿真验证。
1 主被动一体隔振指向平台原理分析
基于简化模型对主被动一体隔振指向的传递率进行分析,如图1所示,卫星简化为卫星平台和载荷两个质量块,两者通过弹簧和阻尼构成的被动隔振、主动隔振指向(Fa)环节连接,x0为平台位移,x1为载荷位移,u(t)为平台控制器产生的控制力,d(t)为平台受到的扰动力,k和c分别为被动隔振的刚度和阻尼。

图1 简化分析模型
卫星平台动力学方程为
(1)

载荷动力学方程为
(2)
式中:m1为载荷质量;Fa为作用在载荷上的主动控制力。
Fa分为主动隔振控制和主动指向控制两部分:
(3)

式(1)~(3)通过拉氏变换可得不同连接方式下平台位移到载荷位移的传递率如表1所示。

表1 不同连接方式下平台位移到载荷位移的传递率
注:s为复变量。
将表1中传递率绘制成频响曲线如图2所示,从图2中可见,采用被动隔振可以对高频扰动进行抑制,利用主动隔振可以抑制共振峰,进一步采用主动指向控制可实现对低频扰动抑制,故通过主被动一体隔振指向控制可以实现对全频带扰动抑制。
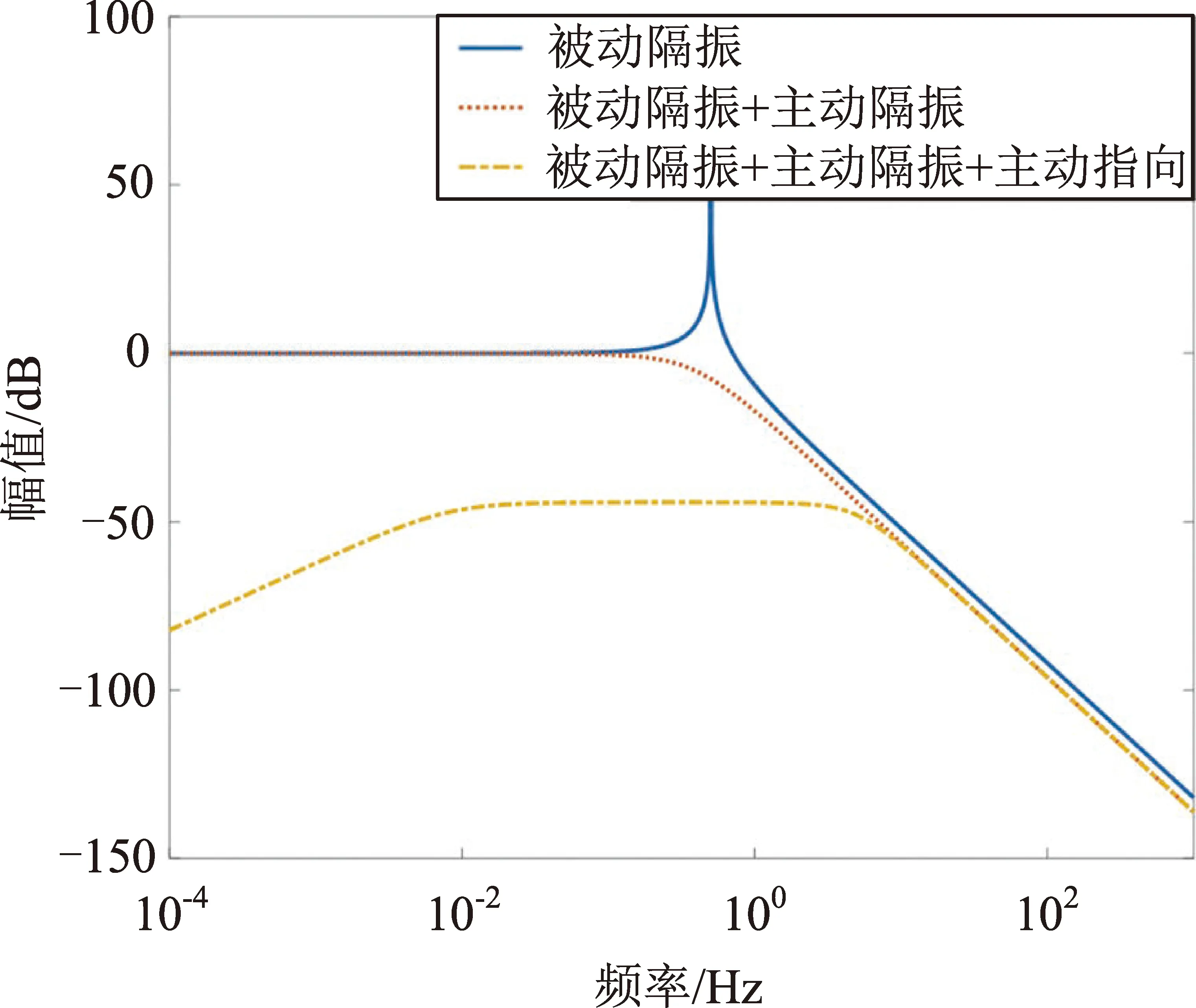
图2 平台位移到载荷位移传递率曲线
2 带Stewart平台的柔性航天器动力学模型
2.1 坐标系与系统构型
定义惯性坐标系,简称U。定义卫星本体坐标系,简称B,固定在卫星本体上,坐标系原点ob为卫星本体质心。定义载荷坐标系,简称P,固定在载荷上,坐标系原点op为载荷质心。
图3给出了带Stewart平台卫星的一般构型,由卫星本体、载荷和Stewart平台(包括6个相同可伸缩的支腿和柔性铰)组成,支腿通过两端的柔性链与卫星本体、载荷连接。其中,Pi(i=1,2,…,6)为6个支腿与载荷的连接铰点,Bi(i=1,2,…,6)为6个支腿与卫星本体的连接铰点。pi为载荷质心指向支腿上端与载荷连接铰点的矢量,bi为星体质心指向支腿下端与卫星平台连接铰点的矢量,ei为支腿下端指向上端的向量,支腿长度为li=‖ei‖,沿支腿方向的单位矢量为ui=ei/‖ei‖。
2.2 系统动力学模型
2.2.1 支腿动力学模型
如图4所示的第i个支腿,质量为mi,弹簧刚度为ki,阻尼系数为ci,作动器输出力为fmi,fpi为载荷对支腿的作用力,对支腿进行受力分析见图4[12]。
在支腿动力学建模过程中,由于柔性铰的存在,考虑载荷作用力fpi近似于支腿轴向方向,可得6个支腿组合而成的动力学模型[8]为
(4)


图3 带Stewart平台卫星构型示意图

图4 第i个支腿的动力学模型
当fm为0时,即作动器不工作,Stewart平台相当于被动隔振平台。当fm为主动隔振控制力时,Stewart平台相当于主被动一体隔振平台。当fm同时包含主动隔振控制力和主动指向控制力时,Stewart平台相当于主被动一体隔振指向平台,同时具备振动抑制和指向调节能力。
2.2.2 有效载荷动力学模型
在柔性铰Stewart平台中,6个支腿作用于载荷质心处的力Plp和力矩Tlp可表示为
(5)

考虑支腿作用在载荷上的力、力矩和载荷受到的干扰力、干扰力矩,采用欧拉法可得载荷的动力学方程为
(6)
式中:mp、Ip为载荷的质量、惯量;vp表示载荷坐标系下质心平动速度向量;ωp表示载荷坐标系下载荷质心角速度向量;Plp、Tlp为支腿作用在载荷质心的力、力矩;Pdp、Tdp为作用在载荷质心的干扰力、干扰力矩。
2.2.3 带柔性附件的卫星平台动力学模型
6个支腿作用于卫星平台质心处的力Plb和力矩Tlb可表示为
(7)

考虑作用在卫星平台的干扰力、力矩,以及卫星平台带有的柔性附件,根据混合坐标法可得星体动力学方程为[14]
(8)

式(4)、(6)、(8)构成了整个组合系统的动力学方程。
3 主被动一体隔振指向控制器设计
本节基于式(4)、(6)、(8)建立的系统动力学模型,开展控制器设计。当同时进行主动隔振控制和载荷指向控制时,系统控制框图如图5所示,包括卫星平台姿态控制回路、载荷指向控制回路及主动隔振控制回路。

图5 复合控制框图
3.1 卫星平台姿态控制器
对于卫星姿态机动控制,欧拉角在90°时存在奇异点,因此采用四元数表示卫星平台姿态为

(9)

四元数与姿态角速度的关系如下:
(10)
式中:q为Q的矢量部分;q4为Q的标量部分;ωb为当前星体惯性角速度。
设卫星平台当前时刻姿态四元数为Qb,卫星平台期望姿态坐标系相对于惯性系的姿态四元数为Qdb。设期望惯性角速度为ωdb,则误差四元数和误差角速度表示为
(11)
式中:⊗表示四元数乘法。
快速变化的卫星期望姿态角和角速度要求闭环控制系统具有足够高的带宽,才能保证闭环系统的跟踪性能。系统闭环控制带宽的选取,受星上挠性附件模态频率限制,同时还要综合考虑测量噪声和执行机构力矩噪声的影响。因此,采用前馈控制器与反馈控制器共同作用来取得较好的控制效果,控制器的表达式[14]为
(12)

3.2 载荷指向控制器
设载荷当前时刻姿态为Qp,载荷期望姿态坐标系相对于惯性系的姿态为Qdp。设当前星体惯性角速度为ωp,期望惯性角速度为ωdp,则载荷误差姿态Qep和误差角速度ωep可表示为
(13)
设计载荷指向控制器[14]为
(14)

由载荷控制力矩指令可解算支腿控制力为
(15)

3.3 主动隔振控制器
通过对每个支腿采用积分力反馈控制[10],实现主动隔振控制。在Stewart平台支腿上安装力传感器,测量支腿与载荷连接处的作用力,提供给主动隔振控制器,通过作动器产生主动控制力实现主动隔振。支腿主动隔振控制力为
(16)
式中:g为积分力反馈增益。
当同时进行主动隔振与指向控制时,需要支腿作动器总输出力为
fm=fmi+fmp
(17)
4 数字仿真
4.1 仿真参数
为验证带有主被动一体隔振指向Stewart平台的柔性航天器的指向性能,按如下参数开始仿真:载荷质量mp为2000 kg;载荷惯量Ip为diag{3000,3000,2000}(kg·m2);星体质量mb为3000 kg;星体惯量Ib为diag{104,104,0.5×104}(kg·m2);支腿的刚度系数K为4000 N/m;阻尼系数C为2.7 N·s/m;卫星本体俯仰轴方向安装两块大型太阳翼,考虑柔性帆板的前6阶模态,频率为0.118 Hz、0.696 Hz、0.711 Hz、0.833 Hz、1.933 Hz和2.421 Hz,阻尼比ζi=0.005;卫星姿态敏感器测量精度为3″(3σ),卫星陀螺测量噪声为10-4(°)/s,卫星执行机构输出力矩噪声为0.1 Nm(3σ);载荷姿态敏感器测量精度为0.3″(3σ),载荷陀螺测量噪声为10-5(°/s),载荷作动器输出力噪声为0.01 N(3σ)。
4.2 传递率分析
根据上述仿真参数,建立带Stewart平台整星动力学模型,开展系统传递率仿真分析,平台姿态到载荷姿态的开环(Open Loop)和闭环(Closed Loop)传递率如图6所示。当Stewart平台支腿不主动输出力时,相当于被动隔振平台,从开环传递率曲线上可见通过被动隔振能抑制高频扰动的影响,但在基频(0.47 Hz、0.86 Hz)附近存在谐振峰。在采用主被动一体隔振指向控制器后,从闭环传递率曲线上可见通过支腿产生的主动控制力抑制谐振峰,同时也可抑制低频扰动的影响,且高频段传递率与被动隔振基本一致,规律与图2原理分析一致。
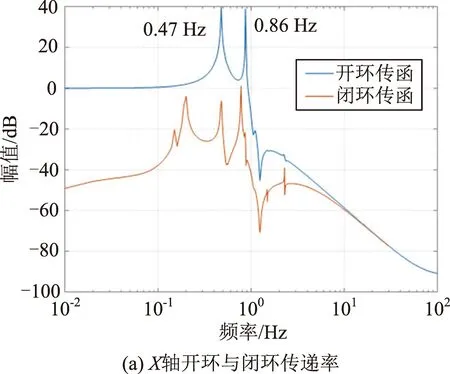

图6 系统开环和闭环传递率曲线
4.3 振动抑制性能仿真验证
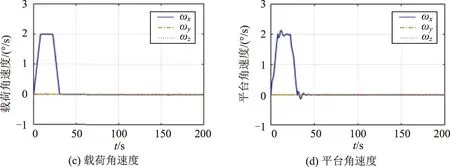
为进一步验证采用主被动一体隔振指向Stewart平台后系统振动抑制性能,在卫星本体上加入CMG扰振力和扰振力矩(见表2),特征频率为100 Hz及对应的0.6倍频和2倍频。开展姿态控制仿真,载荷和平台姿态角速度仿真结果如图7所示。对卫星本体和载荷的的姿态角速度进行频谱分析,结果如图8所示,可见载荷姿态角速度在CMG特征频率处的振动幅值相对于平台都有大幅衰减,说明采用主被动一体隔振指向Stewart平台可以实现对高频振动的抑制。

表2 CMG 扰振特性
注:Fx、Fy、Fz为x、y、z方向的扰振力,Mx、My、Mz为x、y、z方向的扰振力矩。

注:ωx、ωy、ωz为三轴角速度。
图7 平台和载荷角速度随时间变化曲线
Fig.7 Satellite body and payload’s attitude
angular velocity curves over time


图8 载荷与平台X轴角速度功率谱对比
4.4 指向控制性能仿真验证
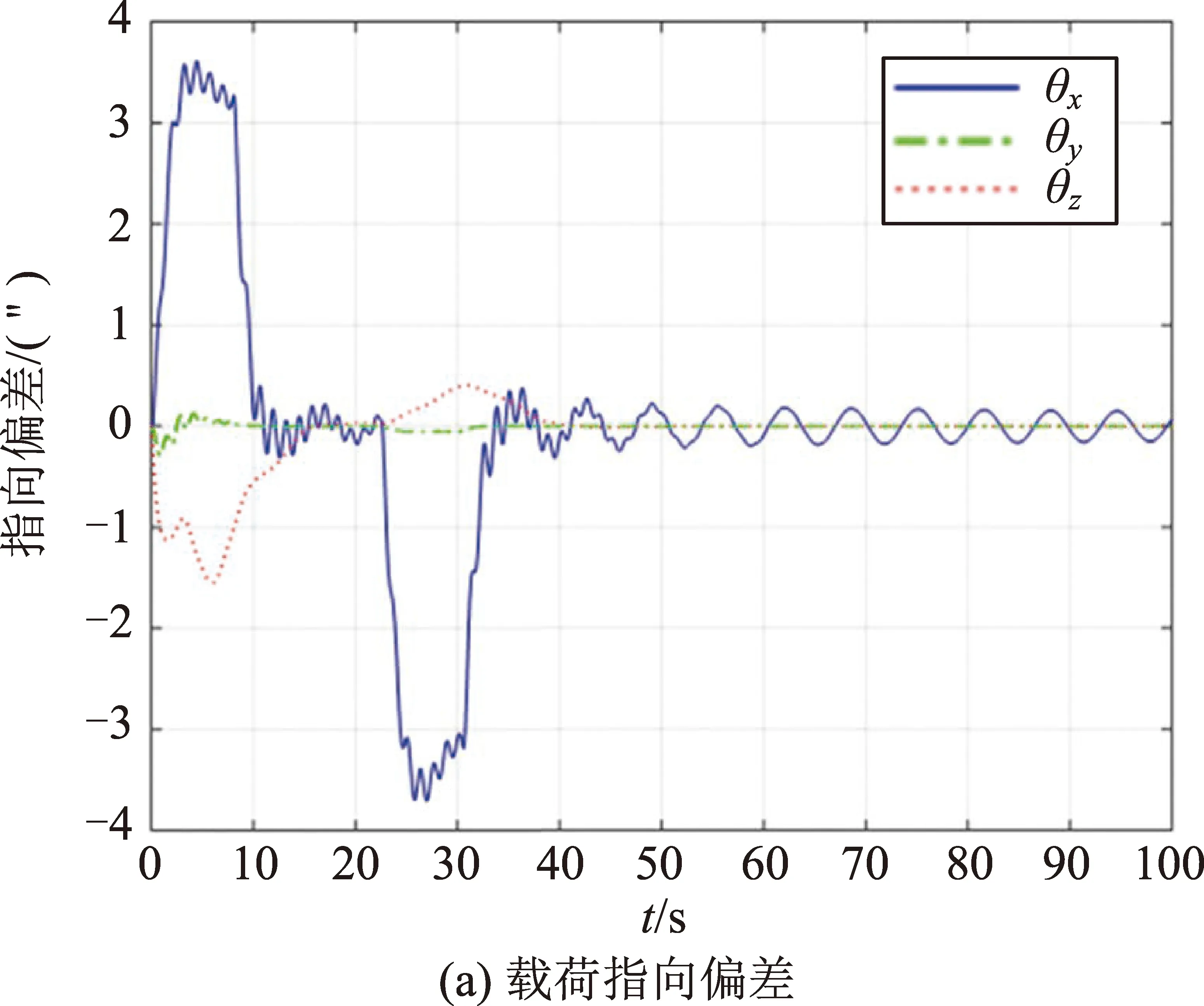
为进一步验证采用主被动一体隔振指向Stewart平台后系统指向控制性能,开展姿态机动控制仿真,绕X轴姿态机动45°,仿真结果如图9到图12所示。由图9和图10可以看出,因为姿态机动激发太阳翼模态振动,卫星平台姿态在机动到位难以进入稳定姿态,受太阳翼模态振动影响姿态和角速度仍存在波动,而在Stewart平台控制下载荷姿态在机动到位后很快进入稳定状态。机动过程中支腿位移变化如图11所示,最大位移小于3.2 mm。
由图12可以看出,姿态机动过程中的载荷最大姿态指向偏差优于3.5″,与卫星平台的最大姿态指向偏差250″相比提升了约两个量级,说明通过Stewart平台主动指向控制提升了载荷的低频指向性能。

图9 太阳翼模态振动

注:θx、θy、θz为三轴姿态角。
图10 姿态机动过程姿态和角速度变化
Fig.10 Attitude and angular velocity during maneuver

图11 支腿位移
5 结束语
以柔性航天器高精高稳指向为背景,本文研究了同时具备振动隔离和指向调节能力的Stewart平台在柔性航天器中的应用。主被动一体隔振指向平台支腿可同时输出主动隔振控制力和主动指向控制力,相对被动隔振平台可以抑制谐振峰,相对主动隔振平台可以抑制低频扰动,故能在宽频域范围抑制低、中、高频扰动的影响。通过在柔性航天器本体与载荷之间引入主被动一体隔振指向平台,将载荷隔振和指向控制相结合,大大简化了系统设计,以较小的代价可获得指向稳定度约两个量级的提升,对高精度航天器发展具有借鉴意义。
