基于智能优化规则的并联混合动力汽车能量管理策略
2020-01-01朱晓璐焦晓红
李 萍,朱晓璐,焦晓红
(燕山大学 电气工程学院,河北 秦皇岛 066004)
0 引言
随着我国经济不断发展,人民生活水平不断提高,汽车逐渐成为人们生活的必需品。汽车保有量的急剧增长,使得汽车尾气导致的环境污染问题和传统汽车对能源的大量消耗引起的能源短缺问题成为了当今社会急需解决的难题。面对传统汽车带来的能源安全和环境污染问题,新能源车的开发和应用就成了世界范围内的新课题和大趋势。在诸多新能源汽车的解决方案中,目前成功实现产业化的只有混合动力汽车。混合动力汽车(Hybrid Electric Vehicle,HEV)是配备了两种或两种以上动力源[1]的汽车,其不仅具有低油耗、低排放等优点,而且行驶里程不受限制,价格适中,被认为是目前最有希望替代传统汽车的方案。因此,对HEV的研究具有非常重要的现实意义。
混合动力汽车能量控制策略的研究方向主要有基于规则的控制策略和基于优化的控制策略两大类[2]。基于规则的控制策略又可分为基于确定规则的控制策略和基于模糊逻辑的控制策略。基于确定规则的控制策略主要依据设计人员的工程经验,让发动机工作在比较高效的工作区间,同时保证电池的荷电状态(State Of Charge,SOC)维持在一个比较好的区间内。这样的控制策略具有较大的随意性,控制策略的效果往往与设计人员的经验有很大的关系,无法使燃油经济性达到最优[3]。而基于模糊逻辑的控制策略是基于确定规则的一种优化,通过加入模糊决策因素,使得整个控制策略更加符合人的判断逻辑[4],以此来达到更好的控制效果。后来随着智能算法和预测理论的发展[5],人们更加关注预测理论与基于规则的控制策略相结合去改善HEV的燃油经济性。
基于优化的控制策略分为基于全局优化和基于瞬时优化两种控制策略。基于全局优化的DP控制可以实现真正意义上的最优[6-7]。但是其计算量大,控制规则复杂且汽车运行的工况必须已知,使得目前全局最优的控制策略无法推广应用。基于瞬时优化控制策略可以实现实时最优,但由于其计算量较大,且功率计算难以准确,目前也还处于研究阶段无法真正应用。因此,基于规则的控制由于其简单易实现的特性,得到了广泛应用。
本文考虑了发动机最优工作区和电池SOC,设计了一种基于确定规则的能量管理策略,并结合粒子群算法对规则控制中不确定的阈值进行优化,提出了一种基于智能优化规则的能量管理策略,在多种工况下的仿真对比,表明已提出的控制策略具有较好的燃油经济性。
1 混合动力汽车系统特性与建模
1.1 并联混合动力汽车系统特性
本文研究对象为某款并联式混合动力汽车,其系统能量流传递示意如图1所示。其中电机可以作为电动机或发电机使用,作为电动机时由电池提供电能;作为发电机时可以向电池充电。从图1中可以看出并联式HEV的需求转矩可以由发动机和电动机单独或者共同提供。其汽车运行所需转矩(Tdem)与发动机(Te)、电机(Tm)提供的转矩之间的关系为
Tdem=Te+Tm。
(1)
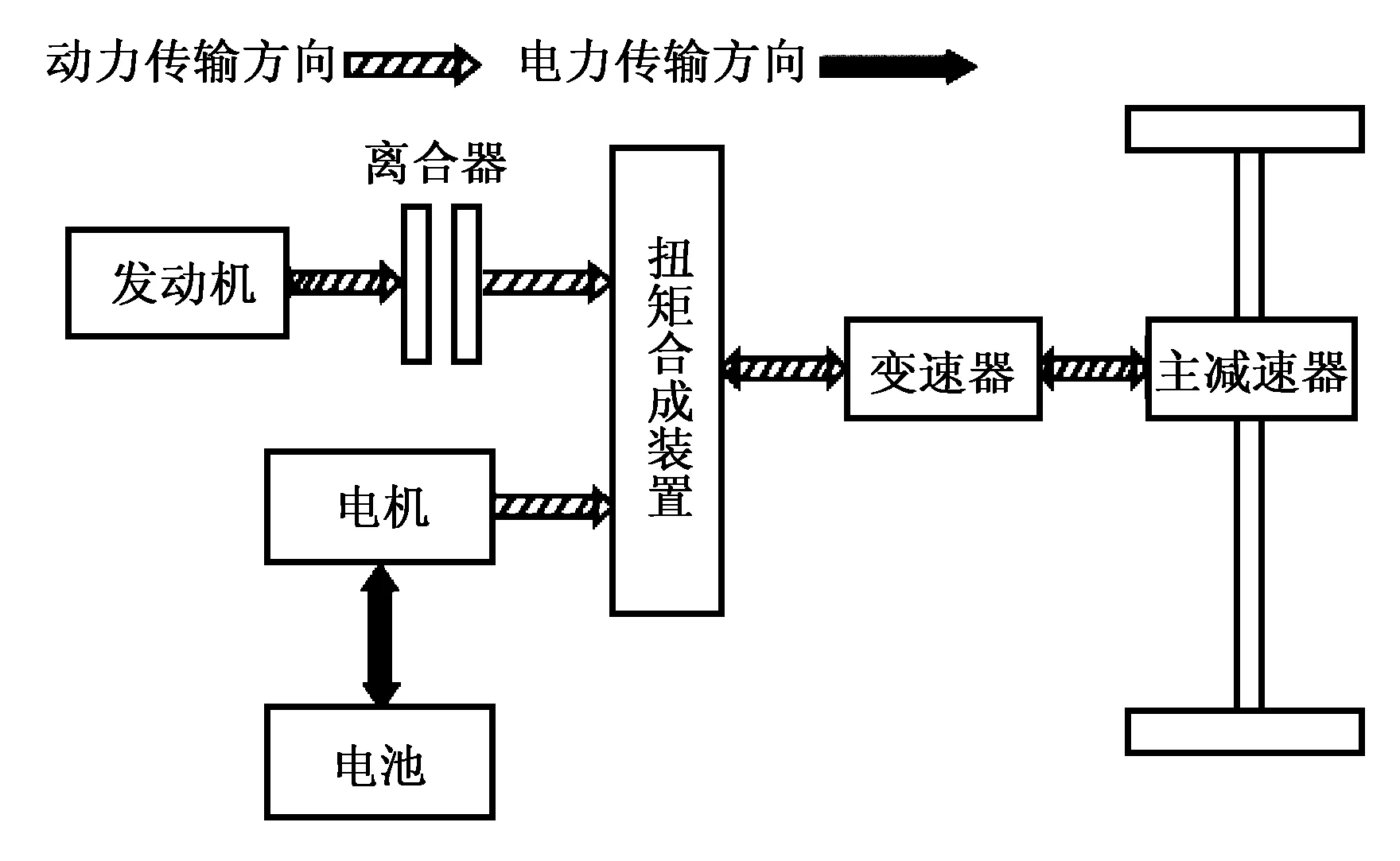
图1 并联式混合动力汽车结构示意图Fig.1 Structure of parallel hybrid electric vehicle
发动机与电机通过同一传动轴与驱动桥相连,因此也可让发动机带动电机运行从而达到为电池充电的作用。并联式HEV的两个动力源——电机和发动机相互独立,其相对于其他结构的车型来说,具有更高的自由度,能量利用率也比较高,因此是目前混合动力汽车发展的主流方向。
1.2 混合动力汽车数学模型建立
1.2.1整车动力学建模
混合动力汽车在行驶时,受到空气阻力、坡度阻力、滚动阻力等外力作用,其动力学方程可描述为:
(2)
式中,m为整车总质量,v为车速;ηt传动效率,选为0.95;i为传动比;r为车轮半径;g为重力加速度;μ为滚动阻力系数;α为爬坡坡度;ρ为空气密度;A为迎风面积;Cd为空气阻力系数。
1.2.2发动机建模
发动机是并联HEV的主要动力源之一,其曲轴转速动态方程为:
Jeωe=Te-Deωe-TLe,
(3)
式中,Je和ωe为发动机的转动惯量和转速,De是发动机阻尼系数,TLe为负载转矩。
对于非插电式HEV,发动机的燃油消耗作为控制策略设计的优化性能指标[8],其表达式为:
(4)
式中,b为依赖于转速与转矩的发动机制动燃油消耗率,通常由如图2所示的曲线查表获得。

图2 发动机燃油消耗率图Fig.2 Engine fuel consumption rate chart
1.2.3电机建模
电机转速动态方程表示如下:
Jmωm=Tm-Dmωm-TLm,
(5)
式中,Jm为电机转动惯量,ωm电机转速,Dm是电机阻尼系系数,TLm为电机负载转矩。
并联HEV中,电机有电动和发电两种状态,则功率表示如下:
(6)
式中,ηm为电机的效率,依赖于电机转矩和转速:
ηm=f(Tm,ωe),
(7)
通常描述为图3所示的曲线。
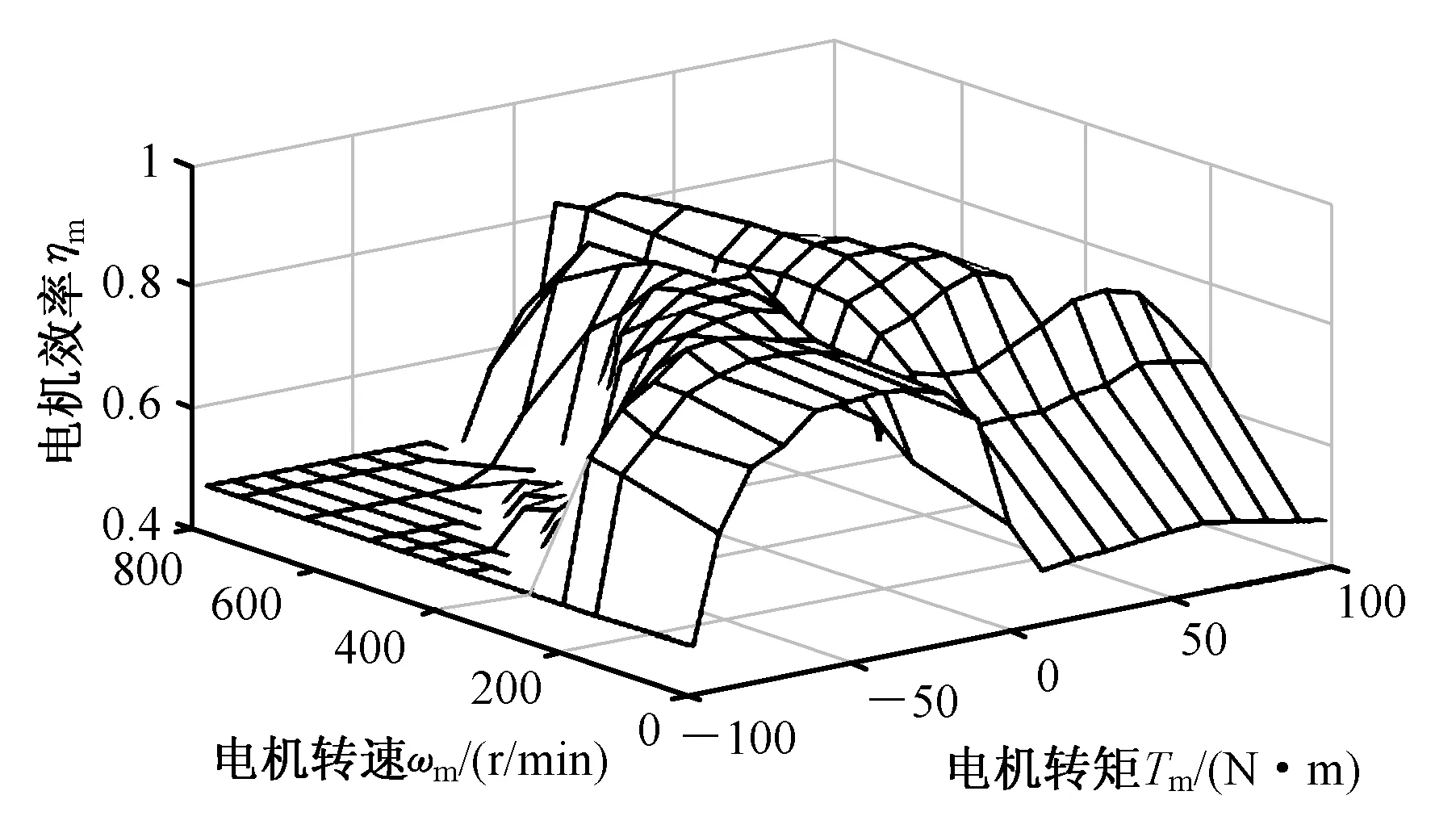
图3 电机的运行效率图Fig.3 Motor operating efficiency diagram
1.2.4电池模块
蓄电池是混合动力汽车的核心部件之一。电池的容量、充放电速度直接影响了混合动力汽车的性能[9]。为了使混合动力汽车有较好的燃油经济性,所选择的电池应该具有较快的充放电速度。将电池模型等效成一个由电压源和内阻组成的零阶等效电路。不考虑电池的充放电效率,电池荷电状态的计算公式为:
(8)
(9)
Pb=ωm·Tm,
(10)
式中,S0为电池初始荷电状态值,I为电池电流,Q为电池最大充电容量,U为电池开路电压,Pb为电池充放电功率,R为电池内阻。
2 能量管理控制策略的设计
2.1 并联式混合动力汽车的工作模式
并联式混合动力汽车有电机及发动机两个动力源,根据电机及发动机的运行状况,混合动力汽车的工作模式有以下5种:
1) 纯电动模式:当车辆所需的转矩较小、车速较慢且此时蓄电池的SOC比较大时,汽车所需转矩由电机提供,车辆运行在纯电动模式下;
2) 发动机模式:当车辆运行中等负荷、发动机处于中高转速时,此时发动机工作在最佳工作区,具有较好的燃油经济性,汽车所需转矩由发动机提供,车辆运行在发动机模式;
3) 混合模式:当车辆处于加速或者爬坡等大负荷工况时,为了使发动机尽量工作在最佳工作区以获得较好的燃油经济性,让发动机和电机同时工作,提供车辆所需的能量,车辆运行在混合模式下;
4) 再生制动模式:当车辆处于减速或下坡状态,在不影响车辆运行的情况下,电机尽可能多的吸收制动能量,为蓄电池充电,车辆运行在再生制动模式下;
5) 充电模式:当电池的SOC处于较低水平时,为了保护蓄电池,电机不给车辆提供能量,在发动机工作在最佳工作区的情况下,电机吸收部分能量为蓄电池充电,车辆运行在充电模式。
2.2 基于规则的管理策略设计
基于规则的能量管理策略具有简单易实现的优点,因此应用较广。混合动力汽车规则控制的能量管理策略,本质是找到发动机较优的工作区域,结合电池的SOC值及车辆运行的需求转矩Tr,尽可能地让发动机工作在高效区,以达到节省燃油的效果。发动机最优工作区的最大转矩为Teh,最小转矩为Tel,电池荷电状态的设定下限为S1,设计出基于规则控制的管理策略如下:
1) 当Tr
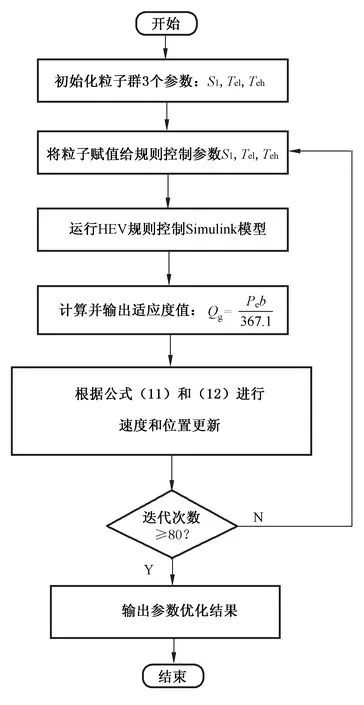
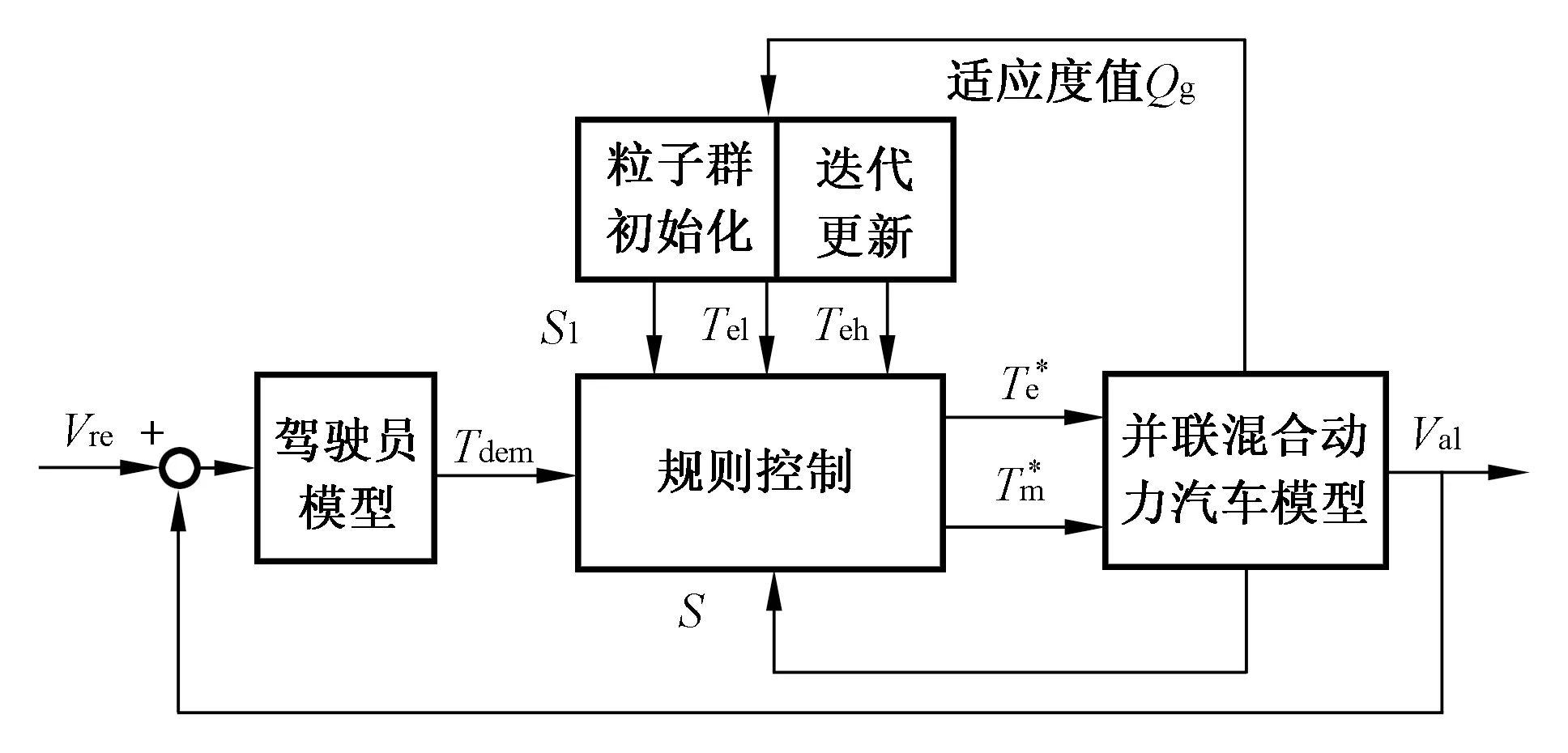
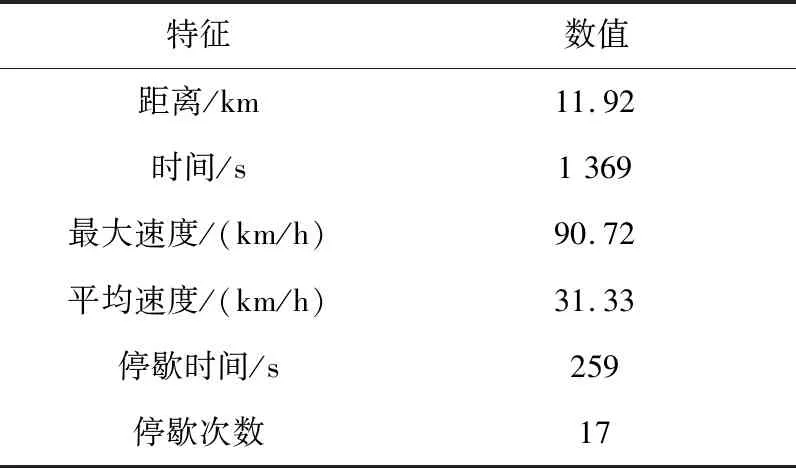
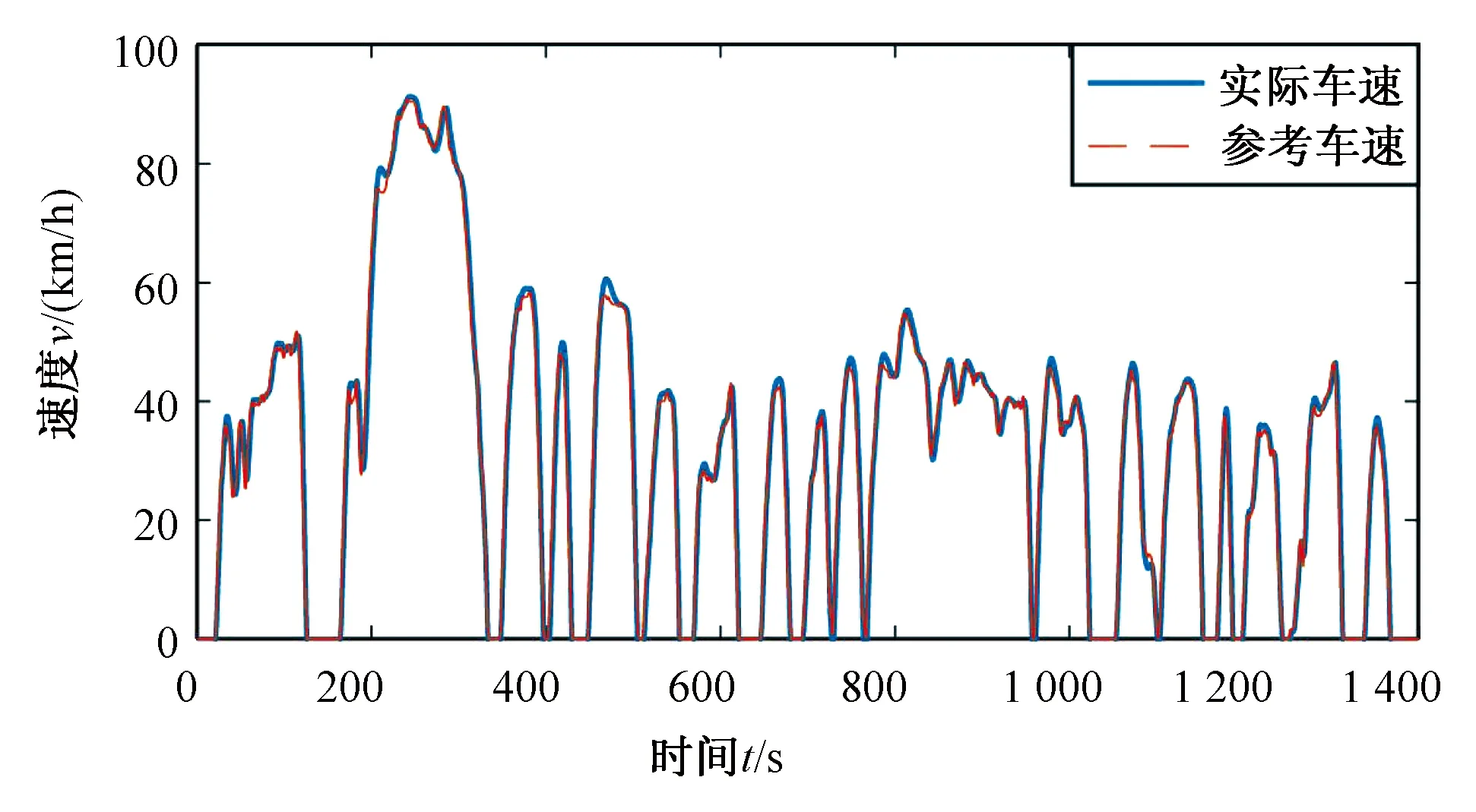
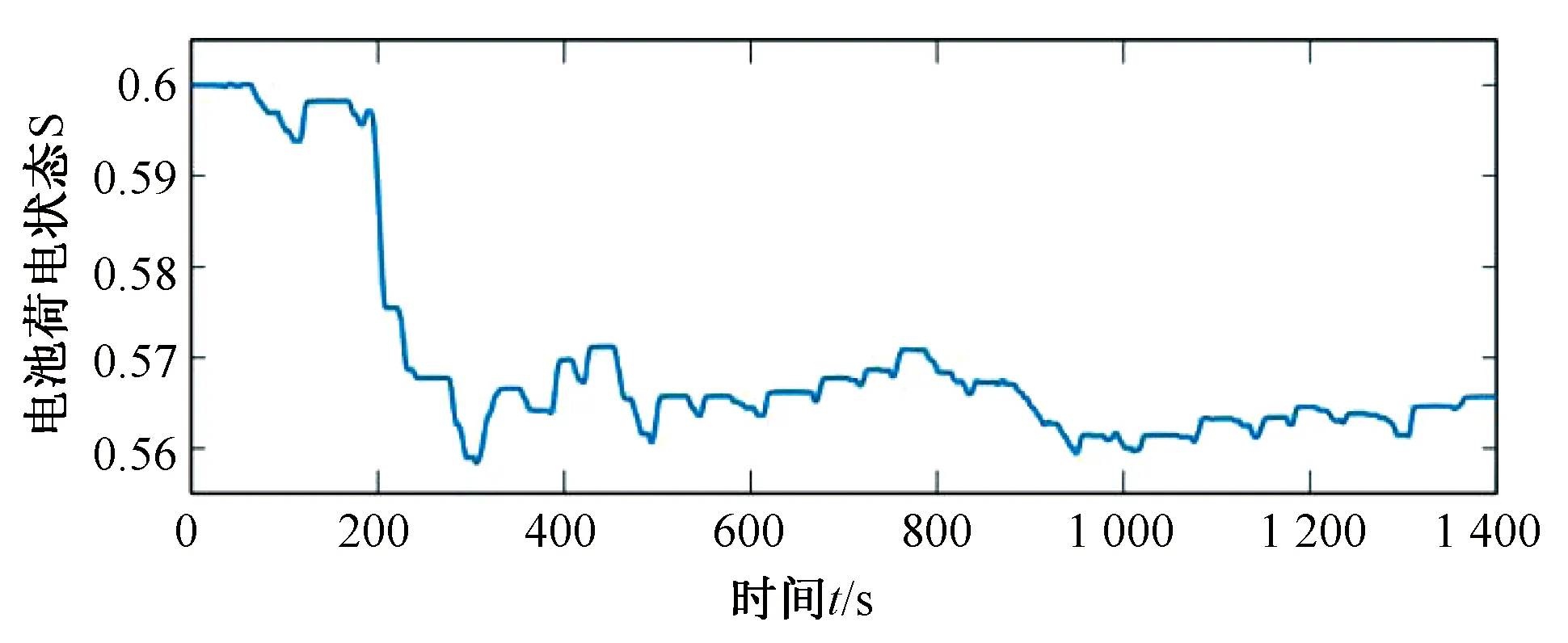
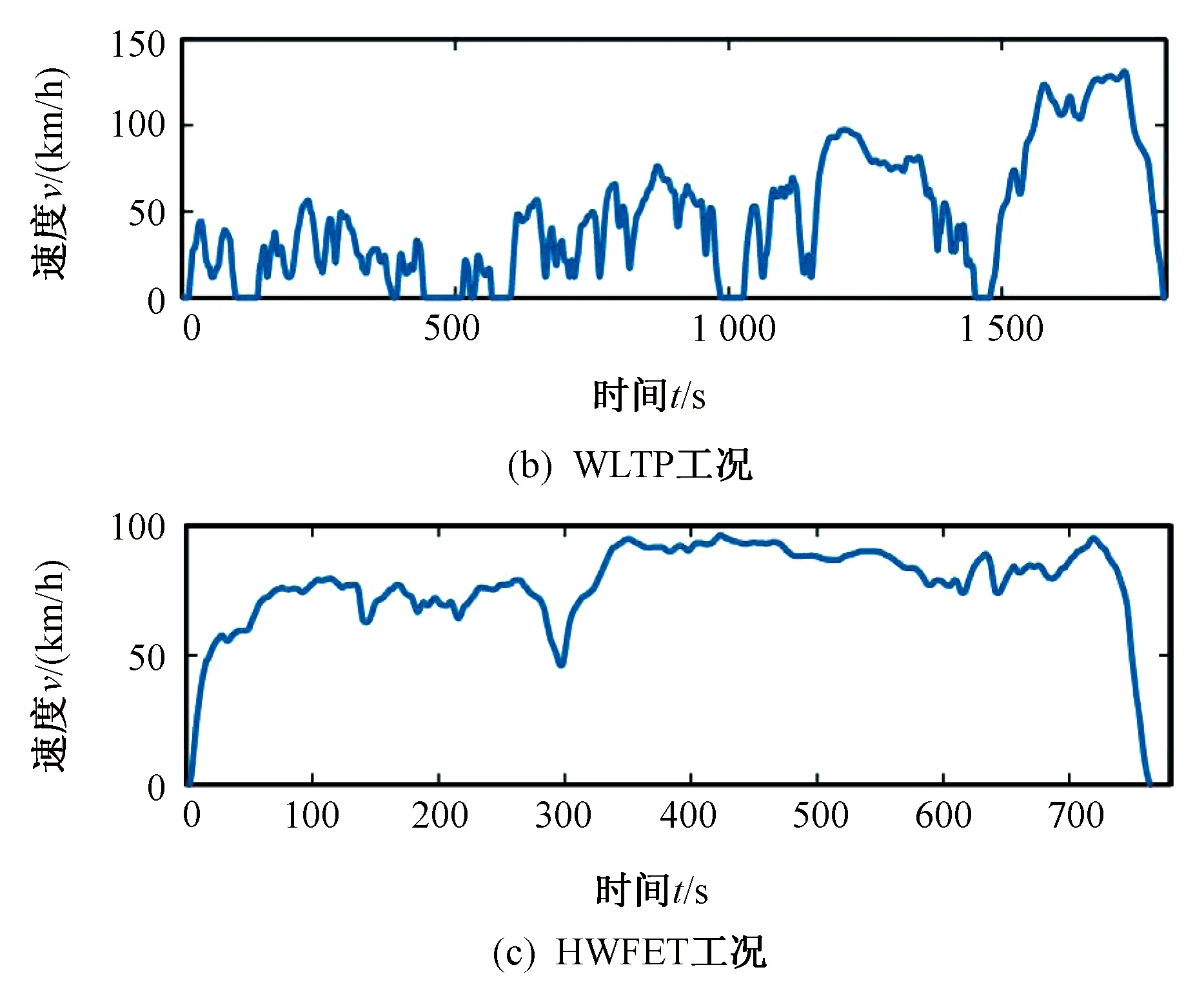
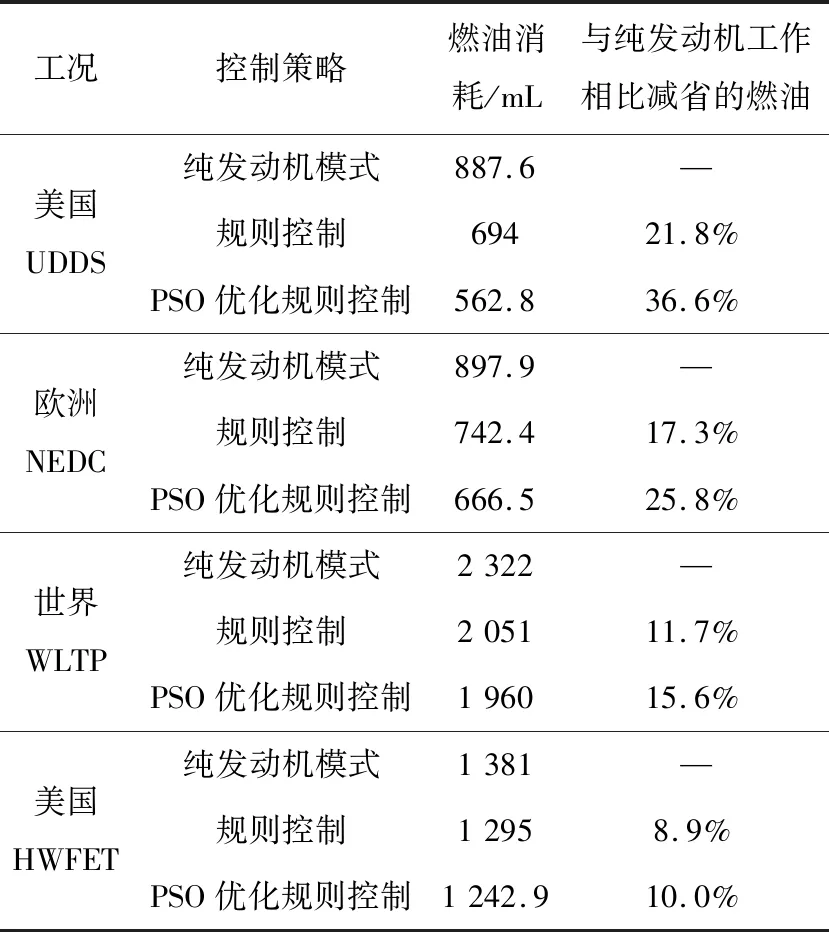
2) 当Tel 3) 当Tr>Teh时,根据电机能够提供的最大转矩Tm.max可细分为两种情况。第一种,当Teh 根据所选择的车型的发动机、电机及电池参数,依据上述规则,设计出基于规则的能量管理控制策略如图4所示。 图4 规则控制流程图Fig.4 Rule control flow chart 由于发动机的运行具有非线性,所以发动机的最优工作区往往很难确定,这也使得设计的规则控制无法达到较好的效果。同时,电池荷电状态的限制值往往也取决于设计人员的经验,随机性比较大。也就是说,对于规则控制中的荷电状态和发动机最优工作区间的3个阈值参数(S1、Tel、Teh)的大小极大程度上影响着所选目标函数的大小,进而影响着HEV整车燃油经济性的提高。因此,考虑使用粒子群优化算法[10](Particle swarm optimization, PSO)对规则控制的3个阀值S1、Tel、Teh在可控范围内进行寻优,并且将规则控制中的燃油消耗式(4)作为PSO的适应度函数,以提高整车燃油经济性。 首先,设定粒子群X的粒子数m=20,且每个粒子描述为Xi=[S1、Tel、Teh]T,通过计算每一个粒子位置的适应度值,去寻找所有适应度值里的个体最优和群体最优值。然后再通过如下所示的速度和位置的更新公式去不断地迭代寻优: (11) (12) 惯性权重ω用来控制粒子的搜寻范围,避免系统发散无法寻到最优的情况。较大的惯性权重ω有利于全局搜索,能让寻优速度变快;较小的惯性权重则更加注重于局部寻优,搜索速度较慢但是更准确。为了达到较好的寻优结果,一般采用动态惯性权重:先让ω处于较大的水平,以快速寻到大概最优区间,再让ω变小,在这个小区间内局部寻优找到最优值。动态惯性权重ω的设置公式为 ω=((ω1-ω2)·(kmax-k)/kmax)+ω2, (13) 式中,ω1为初始惯性权重值,取为0.9;ω2为最终惯性权重的值,取0.4;kmax为最大迭代次数,可根据粒子群优化的结果适当调整;k为当前迭代次数。 考虑到PSO优化程序运行速度和整体收敛精度问题,选择最大迭代次数为80。由于非插电式HEV电池容量小,荷电状态值不能变化太大,以及根据发动机最优工作的一定经验,3个阈值参数的优化范围分别选择为S1∈(0.45,0.6);Tel∈(10,50);Teh∈(50,100)。 PSO算法对规则控制的3个阀值S1、Tel、Teh进行离线寻优,将整车燃油消耗作为判断粒子优劣的适应度函数值。初始化粒子群后,将该粒子群中的粒子依次赋给规则控制中的S1、Tel、Teh,然后运行Simulink的模型得到一个总的油耗值,并将该值传递到PSO优化算法中作为粒子的适应度值,并且在粒子间以及粒子群间比较适应度值大小,判断是否达到最优,如果最优则退出算法。详细的PSO优化的流程示意图如图5所示。 图5 粒子群优化算法流程图Fig.5 Particle swarm optimization algorithm flow chart 混合动力汽车能量管理控制策略的结构框图如图6所示。所设计的控制规则有3个阈值参数,根据适应度函数值Qg通过PSO初始化和迭代寻找最优阈值参数,以提高规则控制的燃油经济性。 图6 能量管理控制策略的结构框图Fig.6 Diagram of energy management strategy 在美国城市循环工况(UDDS)下进行仿真分析。美国城市循环工况数据如表1所示。 表1 UDDS工况数据表Tab.1 Operating conditions dataof UDDS 运行混合动力汽车Simulink仿真模型,输出的实际速度与参考速度如图7所示。 图7 实际速度与参考速度Fig.7 Actual speed and reference speed 从图7可以看出,通过规则控制,实际车速与参考车速基本吻合,说明设计的控制方法可行,能满足车辆运行过程中的动力需求。 图8给出了车辆运行过程中的需求转矩、电机和发动机实时提供的转矩曲线。 从车辆运行中电池荷电状态变化曲线图9可看出,在HEV运行的过程中,蓄电池的SOC值保持在一定的范围内充放电。在这种情况下,能有效的保护蓄电池,延长使用寿命。 纯发动机运行与规则控制下的油耗对比图如图10所示,可以看出,基于规则的能量管理控制策略与纯发动机工作的情况相比,油耗上有明显的减少。从数据上来看,使用纯发动机工作的油耗为887.6 mL,而采用规则控制的能量管理策略后,油耗减少为694 mL,油耗减少了21.8%,节油效果比较明显,所设计的规则控制比较成功。 图8 整车和各动力源转矩变化曲线Fig.8 The vehicle and each power source torque curve 图9 SOC变化曲线Fig.9 SOC curve 在MATLAB中编写并运行PSO程序,对规则控制中的阈值S1、Teh、Tel进行寻优。粒子群算法程序执行后的结果如图11的4个子图所示,可以看出每一个参数的优化结果都是收敛的,符合收敛速度和精度要求。 从PSO运行完的结果来看,当规则控制的阀值S1=0.5、Teh=88.08和Tel=41.85时,最后的油耗最小,结果最优。 将上述3个值替换未寻优之前的规则控制阈值,再一次运行Simulink仿真,得出优化前后规则控制的燃油消耗对比图如图12所示。 图12 优化前后油耗对比图Fig.12 Comparison of fuel consumptionbefore and after optimization 从图12可以看出,使用粒子群优化算法对规则控制的阀值进行优化后,混合动力汽车的油耗又有一个明显的降低。从数据上看,采用粒子群优化规则控制的能量控制策略使用的油耗为562.8ml,该油耗相较于优化前的规则控制减少了18.9%,相较于纯发动机运行情况减少了36.6%,省油的效果比较明显。因此,所设计的方案实现了设计目标。 为了进一步验证所设计的控制规则的正确性,确保在不同的工况下仍然有较好的效果,在新欧洲行驶循环工况(NEDC)、世界轻型车测试工况(WLTP)及美国高速工况(HWFET)下分别进行Simulink仿真。3种工况的车速时间曲线如图13所示。 不同工况下不同控制策略的油耗对比如表2所示: 图13 3种工况的时间速度曲线Fig.13 Time profile of three conditions 从表2可以看出,在UDDS、NEDC、WLTP及HWFET工况下,基于规则的控制均有一定的省油效果,且在用PSO优化后所消耗的油量更少,说明所设计的能量管理策略基本达到了预期目标。在美国高速工况HWFET下,所设计的策略与纯发动机工作的油耗相差不大,主要是由于在高速工况下,汽车起停的次数少且发动机运转在中高速,燃油利用率比较高,发动机处于较优的工作区间。在NEDC及WLTP工况下的数据表明在多起停的市区路况下所设计的能量管理策略具有不错的燃油经济性。3种工况下,PSO优化得到电池荷电状态均为0.5左右,与PSO程序中设置的SOC下限一致。这可能是由于PSO算法的局限性,导致了SOC陷入局部最优,因此,未来将考虑使用改进的智能算法优化阈值参数。 表2 不同工况、不同控制策略下燃油消耗值表Tab.2 Fuel consumption values under different operating conditions and different control strategies 本文以某并联式混合动力汽车为研究对象,首先在考虑发动机最优工作区、根据历史工程经验的情况下,选取合适的发动机最优工作区转矩和电池荷电状态的阈值参数,设计了一种基于确定规则的能量管理控制策略。仿真结果表明,所设计的规则控制在保证SOC维持在一定范围的情况下具有较好的燃油经济性。后来针对规则控制中不确定的阈值参数,采用粒子群优化算法在可控范围内进行寻优,设计了基于智能优化规则的能量管理策略。最后仿真结果表明,优化后的规则控制较优化前的控制策略具有更好的燃油经济性。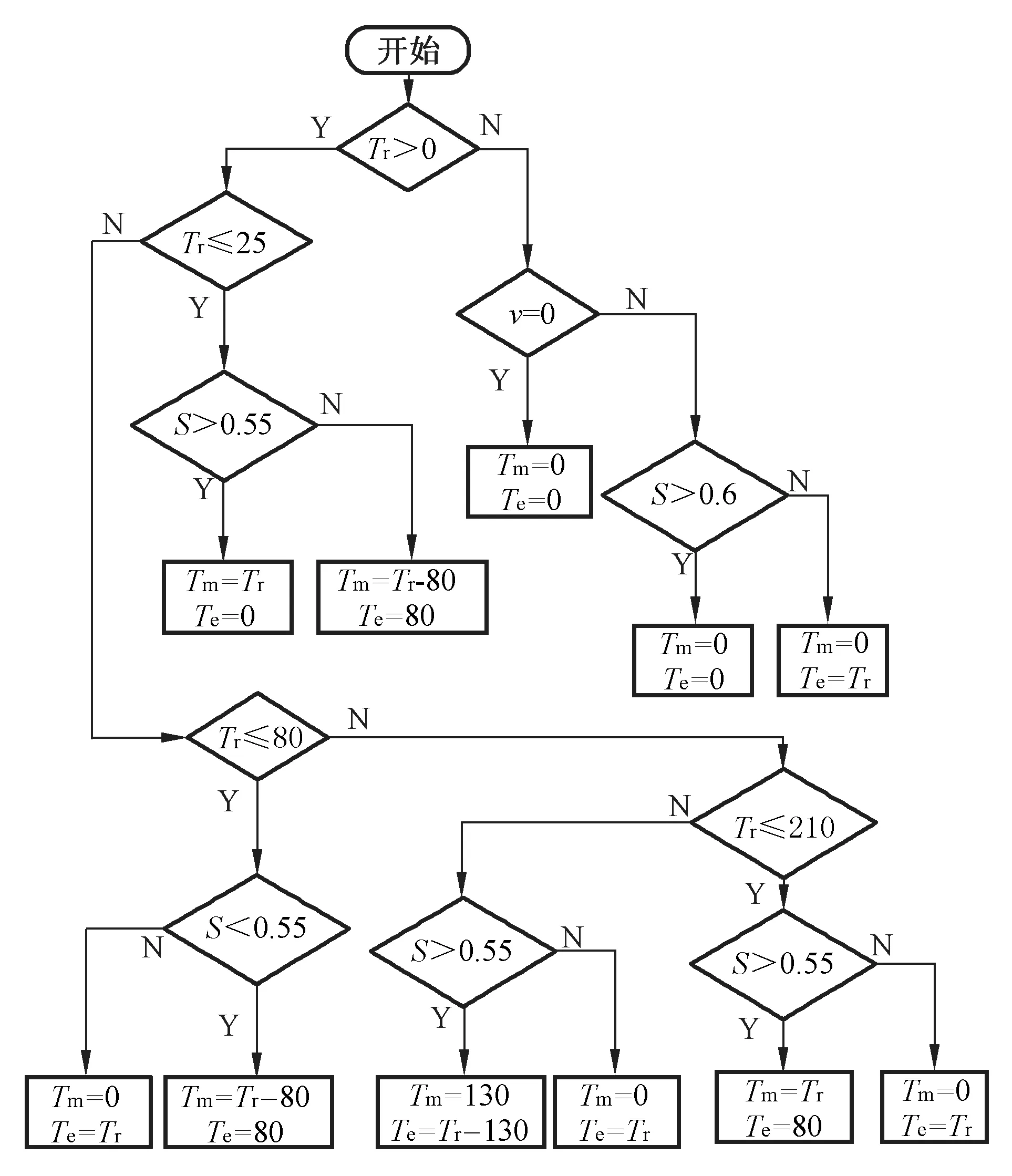
2.3 基于粒子群优化阀值的规则策略


3 仿真分析
3.1 规则控制的仿真分析

3.2 PSO优化的规则控制仿真

3.3 不同工况下的仿真分析

4 结论