基于杆式直线超声电机的微量注射系统*
2019-12-31杨剑之彭瀚旻朱攀丞
杨剑之 , 彭瀚旻 , 圣 娟 , 朱攀丞
(南京航空航天大学机械结构力学及控制国家重点实验室 南京,210016)
引 言
当今科学技术发展迅速,很多场合要求对流体的流速进行精确且慢速的控制,微量注射泵[1-2]和压电泵在工业生产、医疗设备以及精密实验中被大量应用。尤其在医疗方面利用注射泵或压电泵[3-5]对患者进行长时间均匀微量的药物注射,具有恒量、恒速和持续的要求,避免了由于人工注射而带来的误差,从而充分发挥药物的最大治疗效果。微量注射泵的应用在提高医疗给药精度的同时,降低了医护人员的劳动强度,提高了安全性和整体护理水平[6]。
目前市场上大部分注射泵都是国外产品,性能优异但价格昂贵。例如:美国自然基因(Nature Gene)公司生产的PHD22/2000型号,精度为0.35%;美国IMED公司生产的Gemini PC-2TX型号注射泵,流速范围为0.28 ~25 μL/s;德国贝朗(B.BRAUN)公司的Multifuse型、Perfusor Compact型注射泵,流速范围为0.028 ~84 μL/s;日本日东工器生产的BIMOR系列压电泵,流速最低为167 μL/s。国内注射泵使用和研发时间相对国外起步较晚,但也有自主研发的产品投入市场,如:北京科力丰高公司的ZNB系列产品(精度为3%~5%,流速范围为0.28 ~308 μL/s);北京思路高的恒速注射泵TCI-II产品(2%~3%,0.028 ~168 μL/s);浙江大学的WZS系列(±2%,0.028 ~168 μL/s)。
已有的微量注射泵通常是利用直流或交流步进电机驱动,易受到电磁场干扰,由于通过多级减速箱进行调速,导致其整体尺寸较为庞大,难以随身携带,为患者的治疗带来较大的不便。压电泵虽然具有小尺寸、不受电磁干扰的优点,但由于本身存在流速难以连续调控、压力相对较低的缺陷,也难以满足要求[7-9]。笔者希望利用超声电机技术研制一种微型便携、流速可调的微量注射泵。超声电机是20世纪80年代开始发展的一种全新概念的微特电机,它利用压电材料的逆压电效应,使弹性体(定子)在超声频段内产生振动,通过定转子之间的摩擦获得运动和扭矩,可以打破电磁电机尺寸极限[10],易于微型化,并且低转速保持高扭矩,无噪声和电磁干扰,满足便携式微量注射泵的要求[11]。
1 超声电机注射系统结构
1.1 杆式直线超声电机结构及原理
传统注射泵通常由步进电机旋转带动多级减速装置,然后通过丝杠将旋转运动转化为直线运动,笔者采用一种杆式直线超声电机作为注射泵的动力机构[12-14]。该电机基体形状为切角四棱柱,材料采用磷青铜,整体尺寸为4 mm×4 mm×15 mm。基体端面开有M3的螺纹通孔并配有相应的螺纹杆,构成一个丝杠结构,基体两端开有2道圆槽,用以夹持电机,总质量为3.75 g,如图1所示。传统注射泵型号较多,尺寸都在280 mm×210 mm×130 mm左右,质量在2 kg以上;而该杆式直线超声电机尺寸小、重量轻,可以直接集成于注射器中,以便患者携带。

图1 杆式直线超声电机结构(单位:mm)
该电机利用2组极化方向相同的压电陶瓷片,并分别加有一定频率的正余弦交流电,激发出基体定子两个不同方向上的1阶弯振,并将2组1阶弯振模态以相位差90°的方式进行叠加,在定子两端面形成同方向的环形行波,整体产生“摇头式”振动,进而利用螺纹副的摩擦带动中间螺杆进行转动,转化为轴向的直线运动。笔者利用Comsol Multiphysics有限元仿真软件计算得出该电机定子的相应振型,特征频率为54.9 kHz,最大振幅可达60.1 μm,如图2(a)所示。4片压电陶瓷片的相对2片极化方向相同,分别构成A,B两相,加以频率为54.9 kHz的相位差90°的正余弦交流电,基体接地,如图2(b)所示。
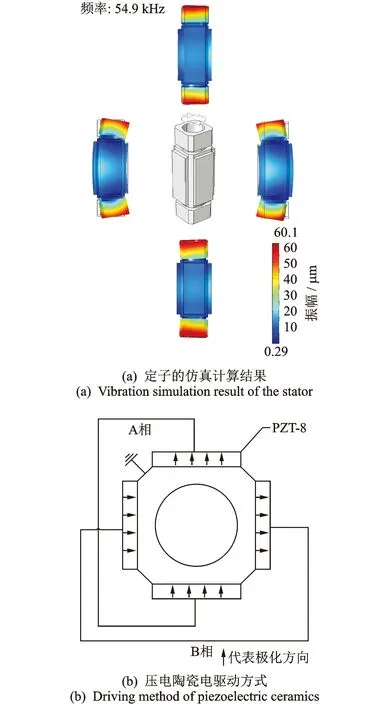
图2 杆式直线超声电机工作原理
1.2 超声电机激光测振
为验证仿真的准确性和有效性,笔者采用德国Polvtec公司PSV-300型激光多普勒测振仪对超声电机基体端面进行了振动扫频实验,如图3(a)所示,得到电机基体A,B两相的特征频率曲线及相应振型。A,B相工作频率分别为53.91 和54.10 kHz,两相弯振的方向相互垂直,与仿真计算结果一致,且两相特征频率接近,容易实现对电机正常工作的控制,如图3(b)所示。

图3 激光测振实验
1.3 超声电机夹持装置
超声电机通过压电陶瓷对基体激振,从而产生相应的振型来进行工作。因此,超声电机夹持装置的设计尤为重要,要在不影响基体正常振动的前提下对电机进行固定,否则会导致工作振型改变或者振幅大幅减小,无法正常工作。仿真计算表明,在压电陶瓷的上下沿处振幅接近为0,是电机工作的节线位置,因此在此处对电机进行夹持,如图4(a)所示。在电机基体振动节线上开有圆形沟槽,用以配合夹持装置固定电机,并通过2对紧固螺栓和螺母对整体结构进行固定,夹持装置如图4(b)所示。在超声电机注射系统中使用1 mL标准注射器,和电机一同固定在可调式导轨上,并保持电机螺杆和注射器推杆在同一高度。注射器推杆直接由杆式直线超声电机推动,没有外加任何减速装置。为了使电机的丝杠结构配合得更加紧密,加大电机的推力,在螺杆端部安装了一个2g的配重块,整体装置如图4(c)所示。
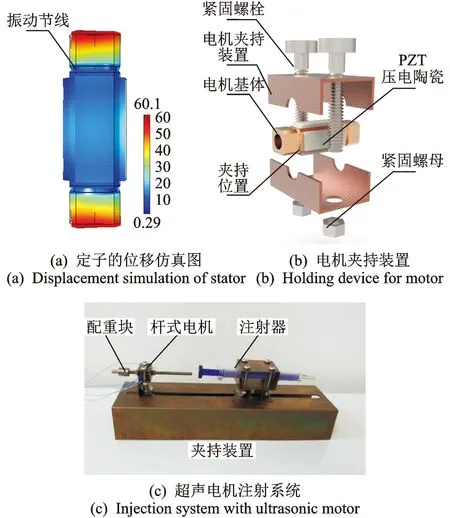
图4 超声电机注射系统机构图
2 实验测试系统
2.1 实验测试装置及测试方法
笔者对上述超声电机注射系统进行了流量测试实验,通过双通道信号发生器及2台功率放大器分别对电机A,B相进行驱动。通过对电机的调试,发现两相正余弦交流电频率在52.57 kHz时工作情况最稳定。电机在实际工作时带有螺纹杆以及配重块,所以工作频率与之前测振(无螺纹杆和配重块)得到的频率有一定差异,但在合理误差范围内。
在注射器端口处外接一个管径为3 mm的计量管来测量流速,利用蒸馏水作为计量液体。在慢速情况下(流速低于0.5 μL/s)利用计时器对计量管中液体流过5 mm长度(容积为35.325 μL)所用时间进行计时,从而得出超声电机注射系统的流速。在快速情况下(流速高于0.5 μL/s)利用高速摄像机对计量管液面位置变化过程进行录像,利用KMplayer软件对实验内容逐帧分析,得出流速。摄像机FPS为240帧/s,所测时间误差在±5 ms以内,实验测试装置如图5所示。

图5 实验装置示意图
为了验证超声电机注射系统在低流速情况下电机工作的连续性,笔者采用日本基恩士公司的LK-G5000高精度激光位移传感器对超声电机注射系统工作情况进行测试,其传感器精度为0.001 μm,采样间隔为100 μs,测试位置为杆式直线超声电机的螺杆端部,如图6所示。
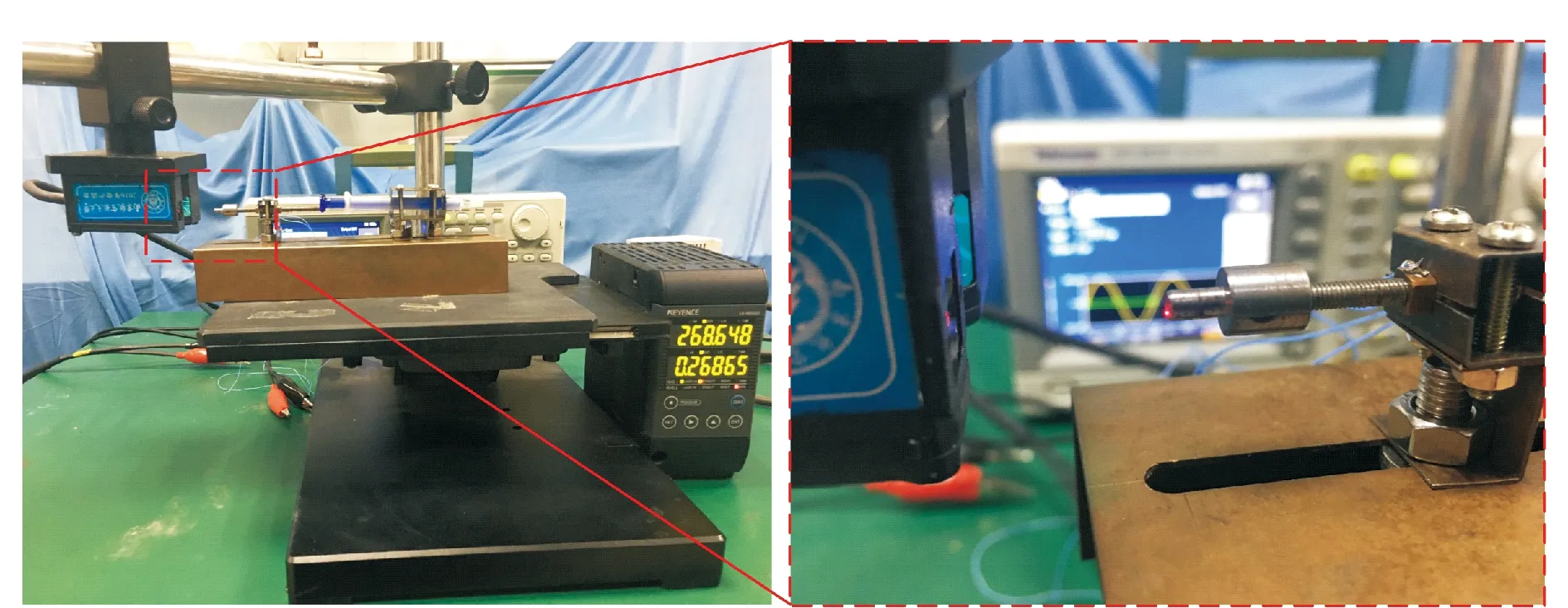
图6 激光位移传感器测试系统
2.2 实验测试驱动波形
笔者利用1台双通道信号发生器和2台功率放大器驱动该超声电机工作,通过调整驱动电压以及脉冲模式下正弦波的占空因数来控制注射系统的流速大小。脉冲模式下正弦波的占空因数类似于脉冲信号的占空比,即固定周期内输出一定时间的固定频率(电机工作频率)的正弦波信号,正弦波所占整个周期比例为占空因数[15],如图7所示。

图7 驱动信号波形
本研究通过功率放大器来调整驱动电压峰峰值,通过信号发生器设置间隔周期为100 ms,正弦波频率为52.57 kHz,通过调整正弦波输出的个数来调整占空因数,例如输出个数分别为5 257,2 629和263时,占空因数分别为100%,50%和5%。笔者分别测试了超声电机注射系统在驱动电压为300,250 和200 V时、占空因数为100%~1%条件下的流速。为了保证数据的一致性,在上述实验中保持相同的实验环境及相同的电机螺杆工作区间,以保证电机工作时具有相同的推力及速度,并对多次实验数据取平均值,使所测得的实验数据更具有可对比性。
3 实验结果讨论及分析
通过上述实验测试了不同电压峰峰值下超声电机注射系统流量与驱动信号占空因数的关系,如图8(a)所示,可以得知超声电机注射系统流量随着驱动信号占空因数的降低而降低。当占空因数为100%、电压峰峰值为300 V时,系统流量达到最大值61.87 μL/s;当占空因数为5%、电压峰峰值为200 V时,系统流量为0.58 μL/s。由此可以看出,通过调节占空因数可以有效地控制超声电机注射系统的流量。为了得到该系统的最小流量,本研究在更低占空因数下进行了相同的流量测试实验,发现当驱动信号占空因数低于1%时,由于螺纹加工精度的原因,超声电机难以稳定地工作。因此测试了系统在不同电压下驱动信号占空因数为1%的流量,并与市场常见的医用注射泵最小流量相对比,如图8(b)所示。在电压峰峰值为200 V、占空因数为1%时得到注射系统的最小流量为0.01 μL/s,而医用注射泵最小流量为0.028 μL/s。这说明笔者设计的超声电机注射系统在未加任何减速装置的前提下,通过调节电压与占空因数所得最低流量精度已经高于传统医用注射泵1倍以上,且易于微型化,方便控制,结构简单,小巧便携。
为了测试超声电机注射系统以最小流速实际工作时的连续性,笔者通过激光位移传感器得到了超声电机在实际工作情况下推杆端部的时间位移曲线,如图8(c)所示。电机在实际工作中有轻微波动,这主要是由于螺纹孔与螺杆之间不同位置的配合程度差异导致,但总体上较为稳定,位移与时间呈线性关系,电机推杆的平均速度为0.457 μm/s。
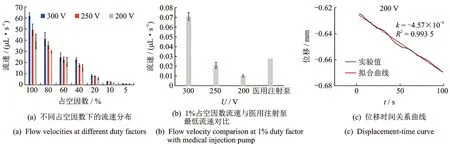
图8 通过占空因数调控流速测量结果
4 结束语
采用杆式直线超声电机作为注射系统的驱动元件,利用超声电机启动响应快、低转速高转矩等特性,通过调控驱动信号的占空因数和电压实现对注射系统流速的调控。利用实验测试得到超声电机注射系统在电压峰峰值为200 V、占空因数为1%且没有任何减速装置的情况下,流速为0.01 μL/s,优于传统注射泵产品的最低流速。证明利用占空因数和电压控制流速方法对于超声电机注射系统是有效的,可以实现61.87 ~ 0.01 μL/s范围内的流速调控。由于超声电机本身的优势,使得整个系统易于微型化,相比传统步进电机注射泵更加轻巧便携。
