时钟同步调度的多跳机械振动WSN多信道传输法*
2019-12-31汤宝平周沿江
汤宝平, 周沿江, 肖 鑫, 邓 蕾
(重庆大学机械传动国家重点实验室 重庆,400030)
引 言
机械振动无线传感器网络可以弥补传统有线机械状态监测在某些应用中的不足[1-2]。其采样频率高,一般为5~50kHz,采样精度要求高,通常需要24bit A/D转换精度[3],采集节点在50kHz采样率下每秒将产生150 kB数据。如何保证机械振动WSN中大量数据的快速传输是一个难题。为此,Xiao等[4]通过载波监听多路访问/冲突避免(carrier sense multiple access with collision avoidance, 简称CSMA/CA)机制协调各采集节点在单信道内数据传输冲突,在单跳星型网络中取得良好的传输效果。但在大型机械装备监测中,由于单跳传输距离有限和监测现场环境阻隔等因素的影响,无线传感器网络时常需要布置为多跳网络[5]。由于该网络中采集节点数据需要通过路由转发,单信道传输在数据转发过程中激烈的信道竞争使得多跳网络中数据传输速率急剧降低,虽然采用时分复用[6-7]的方法可以缓解信道竞争,但会严重压缩各节点的有效数据传输时间,数据传输速率仍然有限。
为解决现有单信道传输方式不适用于多跳机械振动无线传感器网络的问题,笔者提出基于时钟同步调度的多信道数据传输方法,通过将各节点数据传输任务分配到多个信道,避免节点间激烈的信道竞争,提高网络传输速率。
1 多跳无线传感器网络单信道传输弊端分析

图1 采集节点系统框图
文献[8]基于双核心设计机械振动无线传感器网络采集节点。如图1所示,节点采用基于ARM Cortex M4内核的STM32F405作为采集核心实现数据高精度采集及存储,使用基于增强型8051核心的TI CC2530模块作为传输核心完成网络组建及数据传输。所采用的CSMA/CA数据传输机制[9-10]中发送节点需要等待其他节点释放信道后预约信道,成功后才能与父节点进行数据传输。由于网络中所有节点都在单一信道中传输数据,网络规模越大,信道竞争越激烈,因此单信道传输方式数据传输速率极大地受网络跳数制约。对单信道传输进行性能测试,不同网络拓扑下数据传输速率如图2所示,在图3(a)的单跳星型网络中,由于单跳网络拓扑结构简单,数据传输路径短,CSMA/CA机制具有良好的传输效果,传输速率达到105kbps。然而,在如图3(b)及图3(c)的多跳网络中,随着数据传输路径的延长,信道竞争愈加激烈,各节点的有效数据传输时间被严重压缩,数据传输速率急剧降低。即使采用基于时分复用方法对各级路由节点活动周期进行划分,数据传输速率也只能达到10kbps左右,仅为单跳网络的十分之一。

图2 单信道WSN网络传输速率
对此,可以采用多信道传输方法将传输任务分配到多个信道,最大化网络传输有效时间,提高网络传输速率。多信道传输时需明确各节点信道切换时间,这要求各节点具有同步的全局时钟;为保证最优的传输效率,还需要合理的传输调度方法;同时,为避免并行传输时的邻频干扰,还需要对各节点传输信道进行合理划分。因此,笔者从信标时序补偿多跳同步触发方法、父子链路时序轮转传输调度方法和干扰最小化信道分配方法3个方面构建基于时钟同步调度的多跳机械振动无线传感器网络多信道传输方法,并采用丢包重传机制保证数据可靠传输。
2 时钟同步调度的多跳网络多信道传输方法
2.1 基于信标时序补偿的多跳同步触发方法
全网数据同步传输需要保持各节点传输时隙边界对齐,因此一个关键问题在于如何保证每个节点同步触发数据传输命令(即节点传输起始边界对齐)。单跳网络中,簇头节点广播命令信标帧,其所有子节点可以同步收到命令信标,从而实现传输命令的同步触发。然而,在多跳网络中,为避免多个设备同时发送信标造成冲突,各路由节点收到父节点信标后不能立即转发,而是延迟一段时间后发送[4],造成网络中各节点在不同时间收到数据传输命令。因此,要同步触发传输命令,就需要基于各节点信标时序为其设置相应的命令触发补偿时间。
图4所示为信标网络中一个超帧周期,每一个超帧周期被平分为8份,信标发送设备分别在图中0~8标号的时刻处发送信标。网关(Sink节点)占用帧起始时刻(图4中标号0和8处),其余各节点按入网顺序依次占用剩余时刻。
各级路由节点在转发父节点组网信标时,将父节点退避时间及自身退避时间信息加入信标中,其子节点解析信标得到自身相对网关退避延时时间backoffTime。当收到传输命令时,按照自身backoffTime值设置相应延迟时间。如图5所示,所有节点全部延时到下一超帧周期起始处触发传输命令,则整个网络实现传输起始时隙对齐。
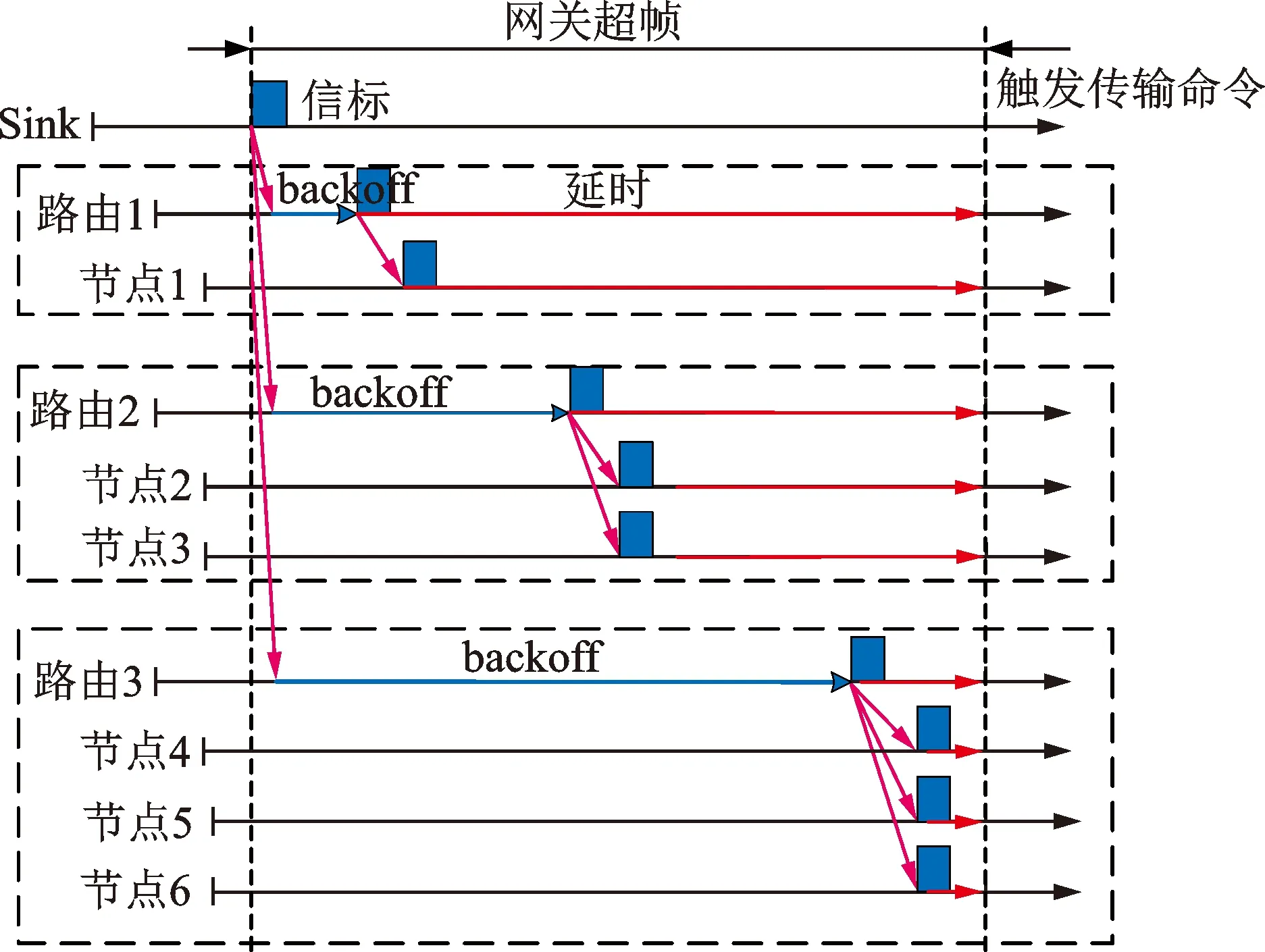
图5 同步触发示意图
2.2 父子链路时序轮转传输调度方法
为达到最优传输速率,应保证同一时间至少有1个根节点向网关节点发送数据。然而,由于路由节点只能转发其子节点数据,需要时隙用于接收子节点数据,无法持续向上发送。因此,需调度节点传输时序,使各节点发送与传输状态相互错开。由于父子节点数据传输状态相反,一旦父节点传输时序确定,子节点时序也将随之确定,因此,采用“自顶向下”方式,通过父子链路时序轮转调度逐层确定传输时序。
首先,统计网络根节点数目N,形成根节点列表Si,其中,将根节点中采集节点置于列表前端;其次,网络上位机根据所发采集命令统计每个根节点传输数据量Di=∑Tj(Tj为Si下第j个采集节点数据量),按传输数据量将根节点分为两类ΩA和ΩB,使得ΩA数据量之和DA与ΩB数据量和DB大致相等,以达到两类根节点轮流发送且传输时间大致相当的目的。分类算法流程如图6所示。

图6 根节点分类算法流程图
设定TA根节点以传输状态开始传输时序,TB以接收状态开始,若节点无数据发送,则进入休眠模式以节省能量。根节点传输时序确定后以相反的时序为其子节点确定传输时序,逐层轮转调度直至完成整个网络时序分配。各节点以500ms为周期切换发送-接收状态,直至数据传输完成。其中,当网关节点处于发送状态时,应提前20ms结束数据发送,并在自身接收信道建立网络,准备接收其子节点上传数据。
2.3 干扰最小化信道分配方法
机械振动无线传感器网络节点部署密集,节点通信范围内可能存在其他传输节点,此时,传输信道的分配必须考虑数据并行传输时带来的信道邻频干扰问题[11]。 同时,由于机械振动无线传感器网络节点工作现场通常存在复杂的电磁干扰,网络信道分配还必须考虑数据传输信道链路质量情况。
首先,由网关节点对所有信道发起能量监测扫描,完成后记录可用信道峰值能量,并将能量值按照由低到高的顺序排列形成网络可用信道列表Ki(1≤i≤16);其次,为避免邻频干扰,需保证同时进行数据传输的信道至少相隔两个频段。如图7所示网络,网关节点入网时分配信道K1,对路由节点,将其按传输起始状态为数据接收或发送分为两类,以R1i和R2j表示,其中i,j分别表示节点在各自类别列表中序号,并将已分配给两类路由的传输信道分别保存在L1和L2中。路由节点信道分配方法如表1所示。

图7 传输时序调度示例

表1 信道分配方法
本研究将超帧周期划分为8份,可以限制网络中路由节点个数最大为7个(网关信标占据帧开始位置)。在考虑邻频干扰的情况下,网络最大需求信道数不超过15个,满足Ki(1≤i≤16)的条件。
3 丢包重传可靠传输机制
机械振动无线传感器网络工作环境恶劣,电磁环境复杂,数据传输时容易发生丢包。为保证数据传输可靠性,笔者采用丢包检测重传机制,如图8所示,接收方通过介质访问控制层协议(media access control, 简称MAC),为每一个接收的数据帧返回一个含有相应包序号的应答帧,指示发送方该数据帧已成功传输。若数据帧或应答帧传输丢包,发送方在规定时长内未收到所发数据帧的应答帧,则认为相应数据帧传输失败,立即重新发送该数据帧。其中若为应答帧失败导致数据重传时,接收方会收到2次相同序号的数据包,接收方对其进行识别并剔除重复的数据包。
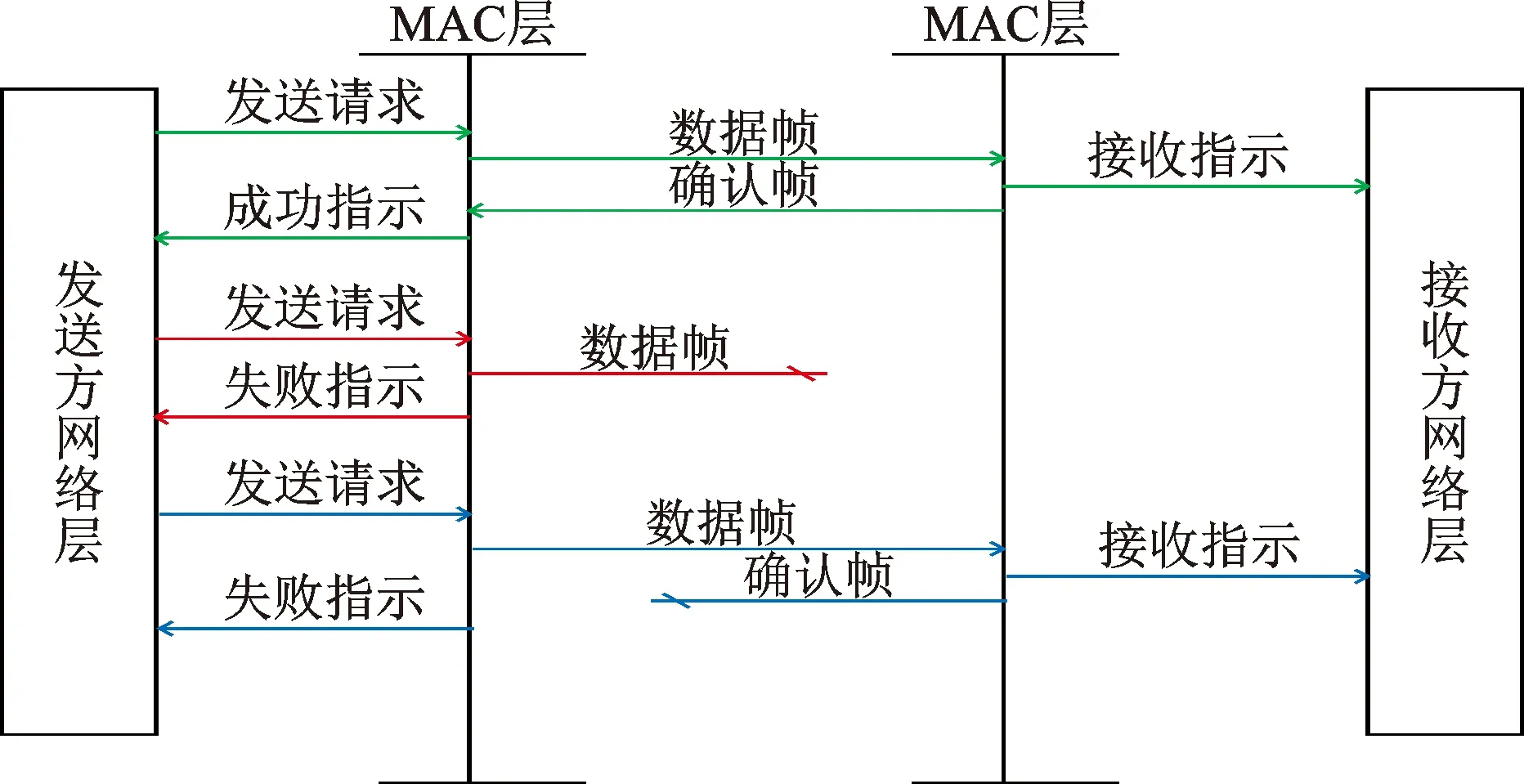
图8 丢包检测示意图
4 多信道数据传输性能测试
在以上多信道传输方法中,传输调度效率和信道干扰程度对传输性能的影响可以直接通过不同跳数网络传输速率差别体现,因此,分别针对网络同步触发精度、不同跳数网络传输速率和传输可靠性3项进行数据传输性能测试。使用的采集节点为课题组前期研制并验证精度的WSNG4节点[8]。
4.1 传输命令同步触发精度测试
传输命令的同步触发是后续数据传输阶段同步调度的基础,为了测试网络传输命令同步触发精度,组建如图7(a)所示的三跳网络,包含1个Sink节点、3个路由节点和4个采集节点。各节点触发传输命令时拉高相应引脚电平,由2ns精度的逻辑分析仪同步采集并记录各引脚电平变化情况,并以节点R1时间为基准比较,实验结果如图9所示。

图9 传输命令同步触发精度
由图可知,所提同步触发方法在三跳网络中最大同步误差在0.5ms以内 ,相对于500ms的传输周期,该方法能有效实现网络传输命令同步触发。
4.2 数据传输速率对比
为测试本研究方法在各级跳数网络中传输速率,将本研究多信道传输方法与现有单信道传输方法进行数据传输实例测试。如图10所示,使用动力传动故障诊断综合实验台(drivetrain dynamics simulator,简称DDS)模拟实际机械振动监测环境,分别按图3所示拓扑组建各级跳数的采集网络,4个WSNG4节点分别采集动力传动故障诊断综合实验台齿轮箱输入轴x,y向和输出轴x,y向机械振动信号,采样频率设为51.2kHz,采样长度从20kB逐渐增加到1 000kB,并分别采用笔者所提多信道数据传输方法和现有单信道传输方法将原始数据传输至上位机,记录其传输速率,结果见图11。

图10 DDS实验台振动数据采集实例图
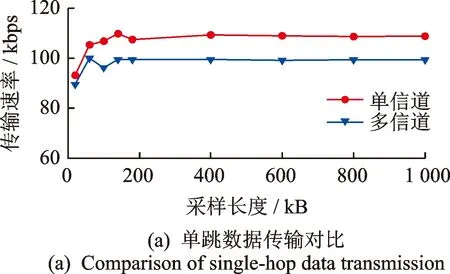
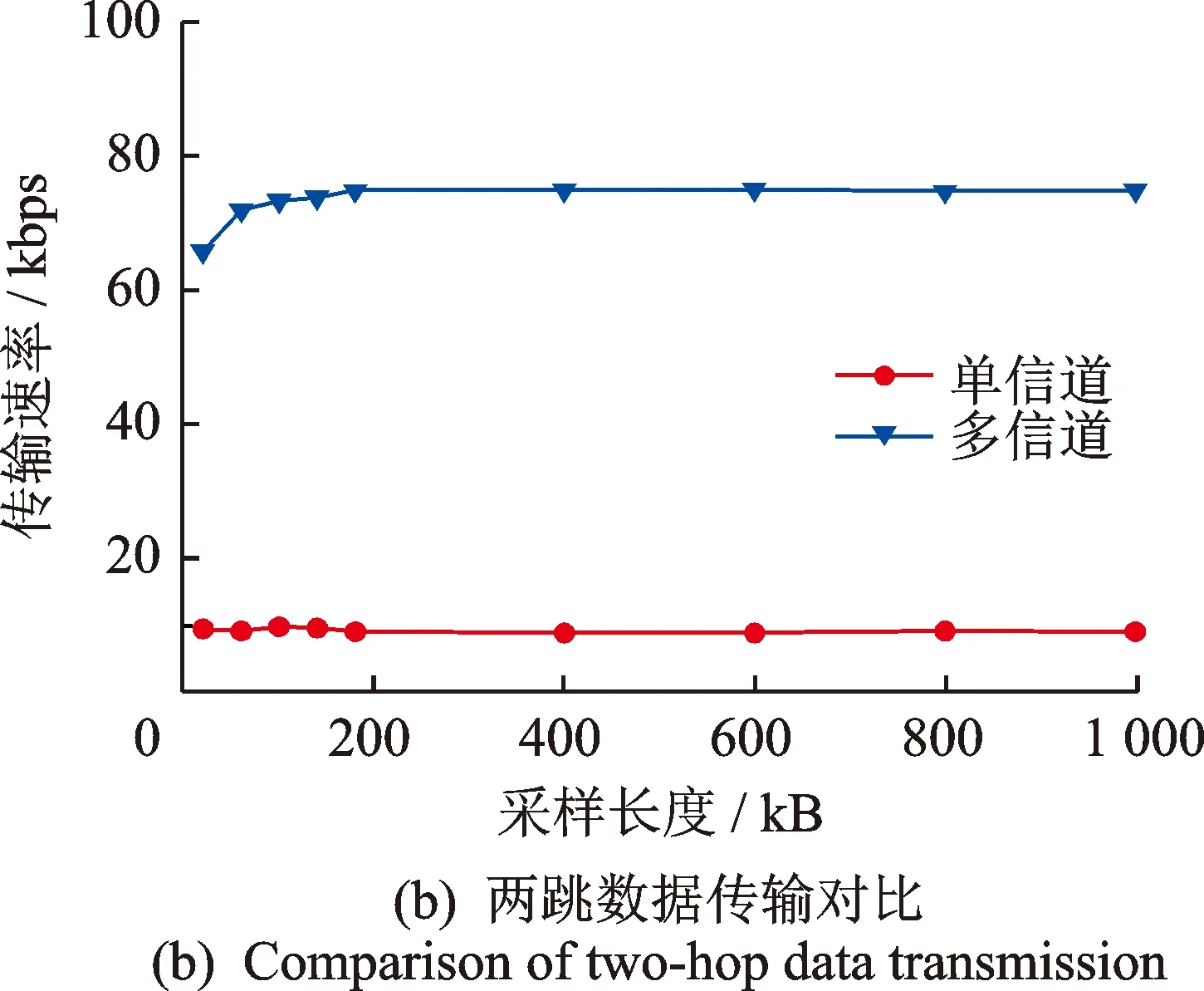

图11 数据传输速率对比
在单跳网络下,由于基于CSMA/CA机制的单信道方法所有节点同时处于数据传输状态,各节点会在其他节点传输数据时将自身数据准备完毕,从而减少数据准备时间,因此在单跳网络中现有单信道方法数据传输速率略高于本研究多信道方法。而在两跳及三跳网络中,由于节点活动周期及数据包冲突的影响,单信道方法传输速率急剧下降,多信道方法表现出远大于现有单信道方法的传输速率。其中,由于多跳传输时路由节点数据需从子节点上传,传输初期路由节点无数据向网关节点传输,导致此阶段的传输信道空闲,故多跳多信道传输在数据量较小(如20kB)时传输速率略低于正常速率。随着数据量增大,其传输速率逐渐增加并趋于稳定。由图11可知,所提的基于时钟同步的WSN多信道数据传输方法在需大量传输原始数据的多跳网络中能够显著提高网络数据传输速率,在多跳网络中传输速率保持在70kbps以上。相对现有单信道传输方法在多跳网络中10kbps左右的传输速率,本方法极大提升了多跳机械振动无线传感器网络数据传输速率。
在传输完成后,对多信道传输方法回传的输入轴y向振动数据进行快速傅里叶(fast fourier transform,简称FFT)频谱分析,时频域分析结果如图12所示。电机输入轴转速为42.6r/min,则行星齿轮以及啮合频率理论值为42.6×21.88=932.088Hz,由频域谱线可以得出齿轮箱行星齿轮一、二级啮合频率分别为932.5和1 866Hz,与理论计算相符。
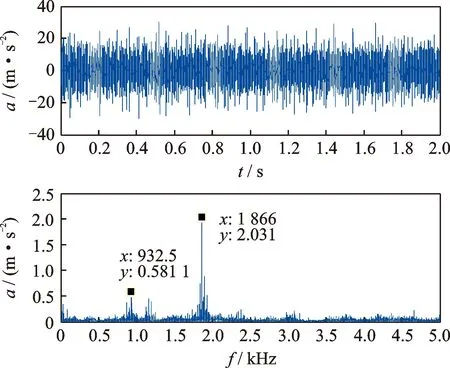
图12 输入轴y向数据频谱分析
相比实验环境,机械振动无线传感器网络实际应用环境中存在不同程度的外界干扰,会影响网络数据传输质量。为测试本研究传输方法在干扰环境中的传输性能,按照图3(c)所示拓扑设计遮挡环境传输对比实验,以物理遮挡模拟实际应用环境中的外界干扰,测试受干扰情况下网络多信道传输速率,结果如图13所示。实验1为理想环境,实验2为受遮挡的干扰环境。在受遮挡情况下,三跳网络大量数据传输时速率为65kbps左右,略低于理想条件下的传输速率。其原因主要是链路受遮挡时节点间单次数据包传输失败概率增加,导致数据包平均重传次数增加,从而略微降低了网络传输速率。相对于单信道方式10kbps的传输速率,干扰条件下本研究方法仍能够保证大量振动数据的快速传输。

图13 干扰条件下传输速率对比
4.3 传输有效性验证
为验证多信道传输方法的有效性,即验证在传输过程中没有丢失数据包,设计定长采样数据传输实验。采用图3(c)所示拓扑构建多跳网络,4个采集节点均以40kHz采样频率定长采集10 000点振动数据,然后以本研究多信道传输方法传回上位机。为便于观察,N1,N2和N3节点分别采集信号发生器产生的标准正弦波、方波和三角波信号,N4节点采集振动台实际振动信号,4路信号时域波形如图14所示。可知所有节点的10 000点采集数据均准确传回上位机,信号未出现丢点现象,验证了本研究多信道传输方法的有效性。
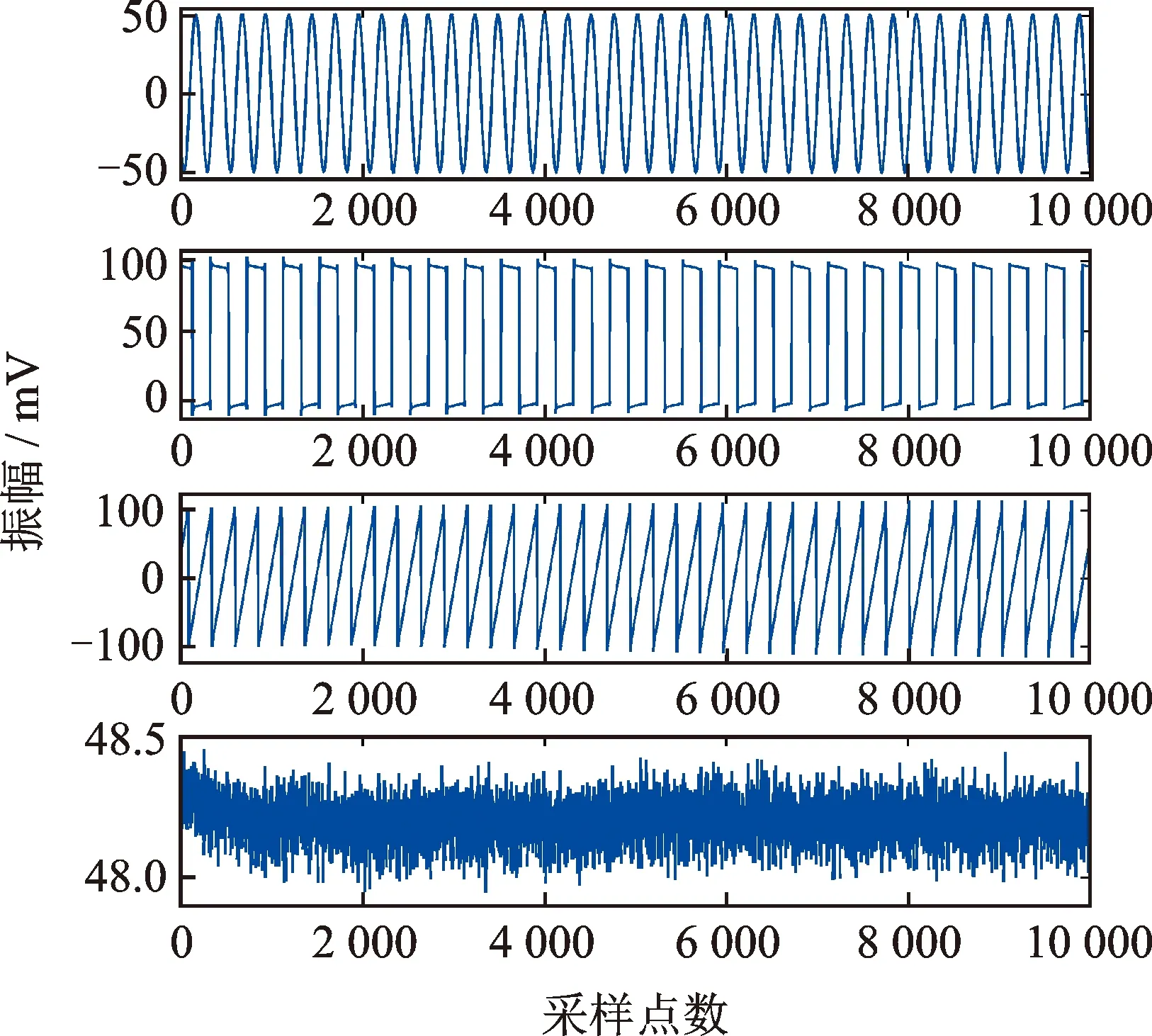
图14 定长采样信号时域图
5 结束语
针对机械振动无线传感器网络在多跳网络中大量数据快速传输的需求,提出了一种基于时钟同步调度的多跳机械振动无线传感器网络多信道数据传输方法。采用信标时序补偿方式实现全网传输命令同步触发,采用父子链路时序轮转调度方式完成网络传输时序调度,结合网络数据链路质量和信道干扰最小化完成网络传输信道分配,并采用丢包检测重传机制保证数据传输的可靠性。性能测试表明,相较于机械振动无线传感器网络中现有的单信道数据传输机制,该方法在多跳网络中具有明显的传输速率优势,能够保证数据传输准确性,极大地提高了机械振动无线传感器网络多跳数据传输速率及传输时效性。
