一种基于置信评估的多磁信标选择方法及应用
2020-04-06郑元勋王晓光胡利峰李清华王常虹
郑元勋,王晓光,胡利峰,李清华,王常虹
(1. 中国兵器工业集团航空弹药研究院,哈尔滨 150001;2. 哈尔滨工业大学空间控制与惯性技术研究中心,哈尔滨 150001)
在未来战争中,尤其在复杂的城市环境,如地下、室内以及障碍物分布密集的环境中,干扰信息普遍存在。GPS 信号穿透能力弱、惯性导航元件导航误差随时间积累[1],无法长时间的提供稳定、准确且快速的导航解算服务。而视觉与激光雷达等导航定位方式受障碍物等因素干扰较严重,导航定位精度较低。磁信标导航系统因其优秀的穿透性、鲁棒性以及误差不积累的特点,成为这些复杂环境下一种可靠的导航源[2-4]。
磁信标导航系统主要分为利用环境中分布的自然时变磁场与人工布置的时变磁场两种方式,其中自然时变磁场指在固定场景中,由环境中的电子设备等所产生的在一定时间内稳定存在的时变磁场,通过建立环境中时变磁场分布图,再在应用过程中与之进行匹配,即可实现目标的定位[5]。但这类方法对环境中先验磁场信息的精度依赖较高,且在环境磁场分布发生改变或一些磁场分布特征较弱的环境下定位精度较差,因此局限性较为明显。而利用人工时变磁场对目标进行导航定位,相对则显得更为可靠且精度较高[6-8]。
在磁信标导航系统中,磁信标产生的磁场强度随距离增加快速衰减的特点,使得单个磁信标的有效覆盖范围并不大,因此在实际应用过程中,往往通过在环境中布置多个磁信标以期望达到完全覆盖的目的并提供足够的冗余度[9]。然而由于环境中磁信标与目标相对方位不同以及未知噪声干扰等因素影响,选择不同的磁信标组合进行解算得到的导航定位是不同的。尤其对于一些能量及计算能力有限的灵巧无人系统来说,由于负载能力的限制,如何节约系统资源的消耗是较为重要的问题。这就要求磁信标导航定位系统应尽量选择数量较少但更为可靠的磁信标进行导航定位,以达到节约能耗,延长无人平台系统工作时间的目的。根据磁信标的工作原理,要求每个磁信标具有不同的工作频率,以保证其产生的磁场强度可在频域被准确区分并提取。而由于磁场在空间中随传播距离快速衰减,因此需要对接收天线的品质因数进行特别的设计才能准确感应到磁信标产生微弱的时变磁场。因此增多目标检测的磁信标数量固然能提高导航定位数据的稳定性,但这将导致磁信标所占用的频率带宽增大,根据接收天线的工作原理,增大天线的检测频率带宽将牺牲接收天线的接收距离,从而降低磁信标的有效工作距离。因此在可接受的范围内牺牲较小的导航定位精度,以获得更远的磁信标感应测量距离是可行的。而这一点可以利用本文提出的磁信标选择方法,以减少检测的磁信标数量的方式实现。同时,减少参与导航解算的磁信标数量还能节约系统的计算资源,省略对系统导航定位精度贡献较低的部分磁信标信号数据处理操作,减少系统状态估计迭代次数。这些对于无人系统及单兵装备等有限能源约束下的装备都具有重要意义。
针对此问题,本文在从前研究的磁信标导航方法与模型[6-11]基础上,提出一种基于置信评估的多磁信标选择方法,在已有的磁信标导航定位算法基础上,根据建立的伪后验概率密度分布模型,计算磁信标测量信息的后验概率,实现磁信标的置信评估,再根据置信评估结果选择估计得到当前条件下置信度最高的最优磁信标组合,以达到提高信息融合效率与节约计算资源的目的,实现系统资源利用最大化。
1 磁信标导航系统定位原理
在我们之前的研究中[11],磁性物体的磁场可将其等效为一个或多个磁偶极子单元的组合,如图1 所示,当在目标位置P=(p x,p y,pz)T处的测量磁场为B时,在位置Mi处的磁信标可建立测量磁场特征矢量

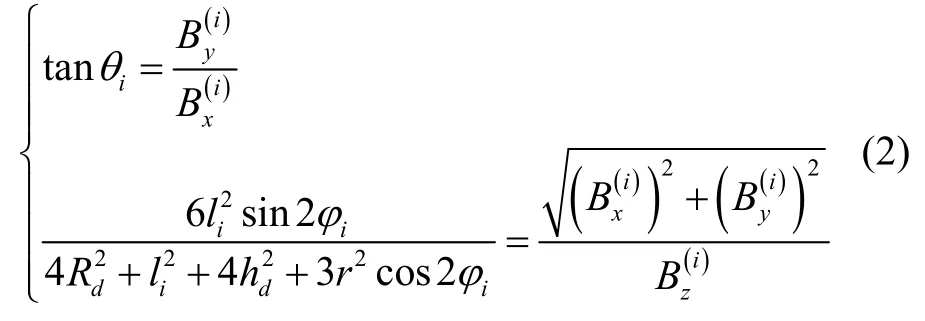
其中,li表示目标与磁信标之间的距离,Rd、hd分别为磁信标尺寸相关的等效半径与高度,设测量磁场的单位方向矢量


图1 磁信标模型Fig.1 Model of magnetic beacon
于是根据目标处关于磁信标的测量磁场矢量,即可计算得到目标的位置及磁信标i与目标的距离li
解算原理如图2 所示[8],存在关系式满足:
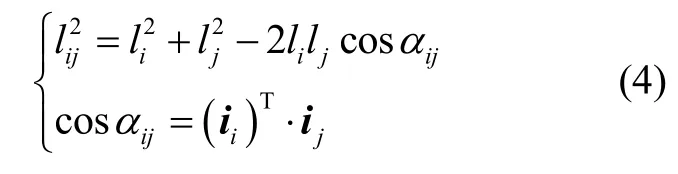
其中lij表示两个磁信标Mi与Mj之间的距离,αij表示特征矢量单位向量ii与ij之间的夹角。当存在3 个及3 个以上磁信标时,可根据式(4)与式(5)实现对目标位置P的解算。

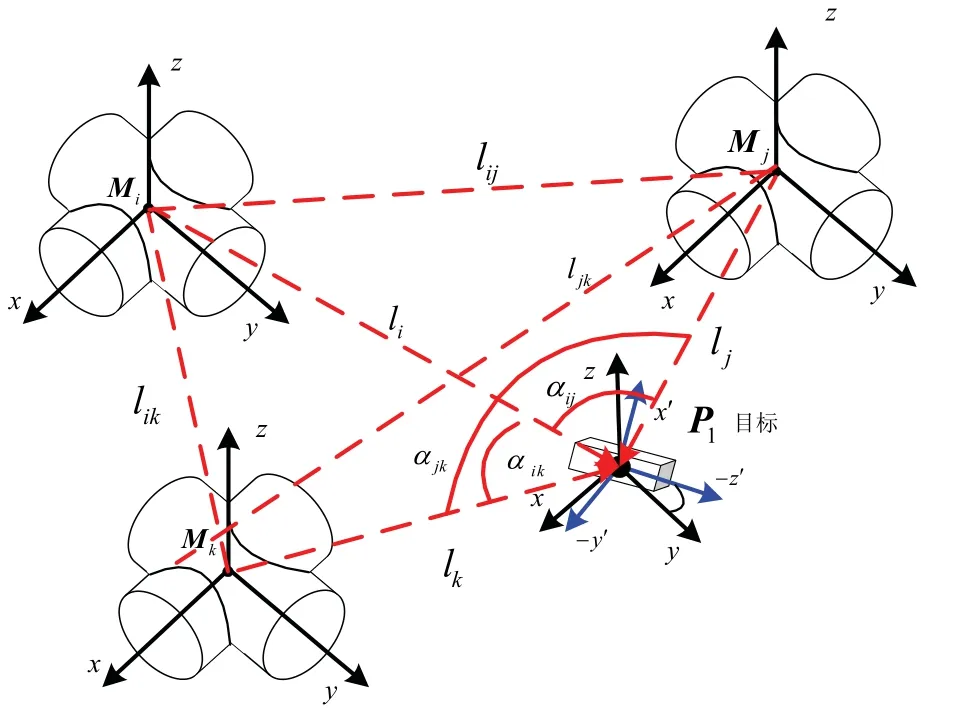
图2 磁信标系统定位原理Fig.2 Principle of magnetic based navigation system
2 磁信标的伪后验概率模型
根据毕奥-萨伐尔定律可知[9],磁信标的测量磁场强度与空间距离满足:

其中,

r表示由磁信标指向目标的距离矢量,μ0为介质磁导率,m为磁信标的磁矩矢量。由于在式(7)中,根据μ0的取值,一般情况下均满足

因此可近似得到磁信标测量磁场强度与目标距离在对数域满足近似线性关系,

其中,

对式(9)求偏导,可得

假设统计测量得到目标关于磁信标i的测量磁场强度方差为2σ,则在目标处产生的测距方差可表示为

假设目标处可对环境中N个磁信标实现稳定测量,且目标的位置可由这N个磁信标较为准确的估计得到,即目标的位置估计结果已知,则可建立磁信标的伪概率密度分布模型:

其中,pi,k表示磁信标i在第k次测量时计算得到的后验概率,表示在第k次测量得到的磁信标i与目标的距离。
3 基于置信评估的磁信标选择方法
由于在目标处所测量到的各个磁信标磁场信息可能混合环境中的噪声干扰磁场或由于测量等因素产生的误差,因此根据测量磁场估计得到的磁信标i与目标之间的距离也存在误差Δli,设Δli误差满足均值为0 的高斯分布。
于是以目标估计位置P周围生成数量为Z的粒子群,粒子记为其中ωj表示包含目标位置信息的系统状态粒子xP,j的权重,设各个粒子权重具有相同的初值,即ωj(0)= 1,j= 1...Z。
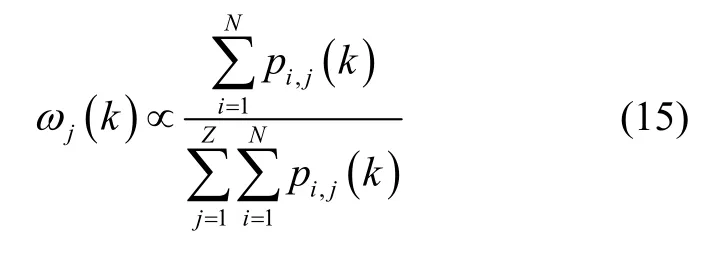
则根据式(13)可计算粒子j关于磁信标i的第k次测量后验概率,记为pi,j(k),于是目标的位置估计结果可表示为

其中,第k次粒子xP,j的权重可由式(15)计算,
而磁信标i的置信评估结果可根据后验概率pi,j(k)计算得到,归一化后可表示为

将γi(k)作为观测量,进行平滑窗滤波,窗口宽度为T,则k时刻磁信标i的估计结果可表示为


其中si∈{ 0 ,1},s=[s1,...,sN]T,1 为元素均为1的N阶列向量。

图3 磁信标选择过程Fig.3 Process of magnetic beacon selection
4 实验校验
本章将通过实验分别针对本文提出的基于置信评估的磁信标选择方法的有效性与计算资源节约两方面进行验证。
4.1 基于置信评估的磁信标选择方法有效性验证
在应用环境中的目标位置存在多个磁信标可观测时,可根据式(18)与式(19)对磁信标进行选择,假设环境中存在10 个磁信标,其中由于实验室条件限制,无法支持10 个磁信标同时工作,因此本文在实验中采用将各个位置的磁信标在目标位置处的测量磁场信息离线处理合成的方式,以达到10 个磁信标同时工作的效果,实验环境如图4 所示,测量干扰磁场强度协方差为100 (nT)2,假设噪声为高斯分布白噪声。
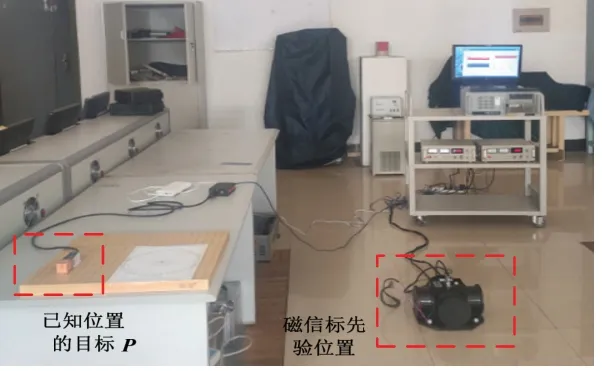
图4 已知先验位置的目标与磁信标采样实验环境Fig.4 Experimental environment of prior target and magnetic beacon
为保证实验的一般性,首先在10 个磁信标分布区域的近似中心位置= (1 0m,12m,0m)处对10 个磁信标的感应磁场进行测量,首先根据磁信标定位方法[5-10],利用10 个磁信标的所有测量数据,根据如图3 的流程进行实验,各个磁信标的位置与根据式(17)得到的置信评估结果如表1。假设磁信标的数量限制约束为选择3 个磁信标,于是根据置信评估结果,分别选择6 组磁信标组合进行对比实验,每组磁信标的选择原则如下:
组1:选择所有磁信标对目标位置进行导航解算;
组2:选择置信度最高的3 个磁信标1,4,8 进行解算;
组3:选择置信度最低的3 个磁信标2,6,10 进行解算;
组4:选择距离最远的3 个磁信标2,8,9 进行解算;
组5:选择距离最近的3 个磁信标1,3,4 进行解算;
组6:选择与目标的距离相近的磁信标7 代替组1 中的磁信标8,对比验证定位结果。
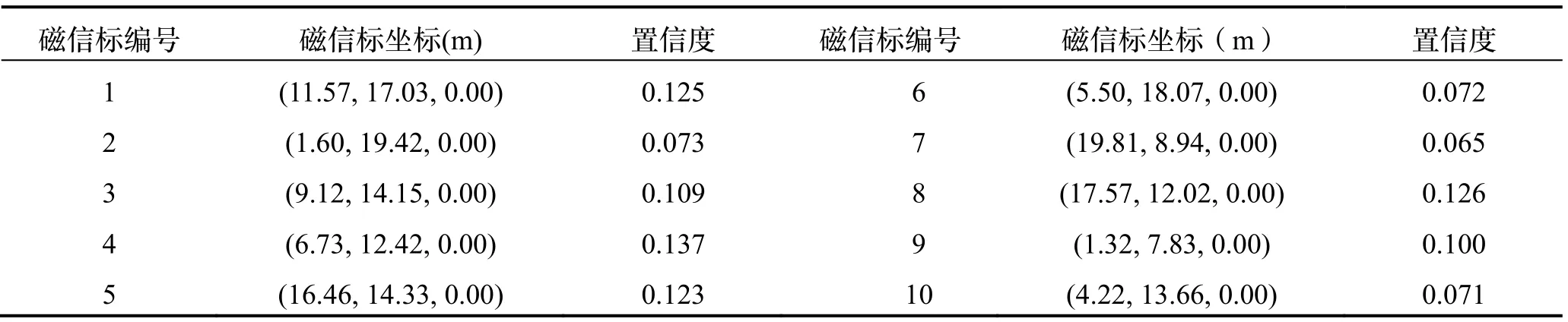
表1 磁信标先验坐标位置Tab.1 Magnetic beacon priori coordination
实验结果利用误差积累概率分布(Cumulated Probability Distribution, CPD)表示,如图5 所示。在实验结果中,组1 利用所有的磁信标进行导航定位具有最高的定位精度,误差期望为0.171 m;组2 至组6的定位误差期望依次为:0.194 m,0.322 m,0.237 m,0.221 m,0.220 m;在组1 实验中,利用10 个磁信标测量数据进行导航解算,各个磁信标的工作频率不一致,这就要求每个磁信标所能分配到的频带更窄,且系统需要处理的数据量更大,因此消耗更多的计算资源,这一点将在下一节中进行验证。而根据实验可知,对于组2 至组6,均为选取3 个磁信标进行导航定位解算,因此在系统计算资源消耗方面可近似认为相等。根据本文提出的置信评估方法选择处的最优磁信标组合,具有最高的定位精度,相对于组2 中最差的情况精度提升65.98%,而相对于组4 中仅依靠磁信标的距离远近(信号强弱)选择的结果,定位精度提升13.92%。在组6 中利用距离相近的磁信标7 代替磁信标8,可发现定位精度降低了11.82%,验证了本文提出的磁信标选择方法是有效的。同时由于实验结果均为实验室环境下获取,各个磁信标的置信度差异性并不大。在实际环境中,复杂的环境干扰使各个磁信标的置信度差异更大时,本文提出的选择方法效果将更为明显。磁信标的分布与选择结果如图6 所示。

图5 6 组对比实验的误差积累概率分布结果Fig.5 CPD of 6 comparisons
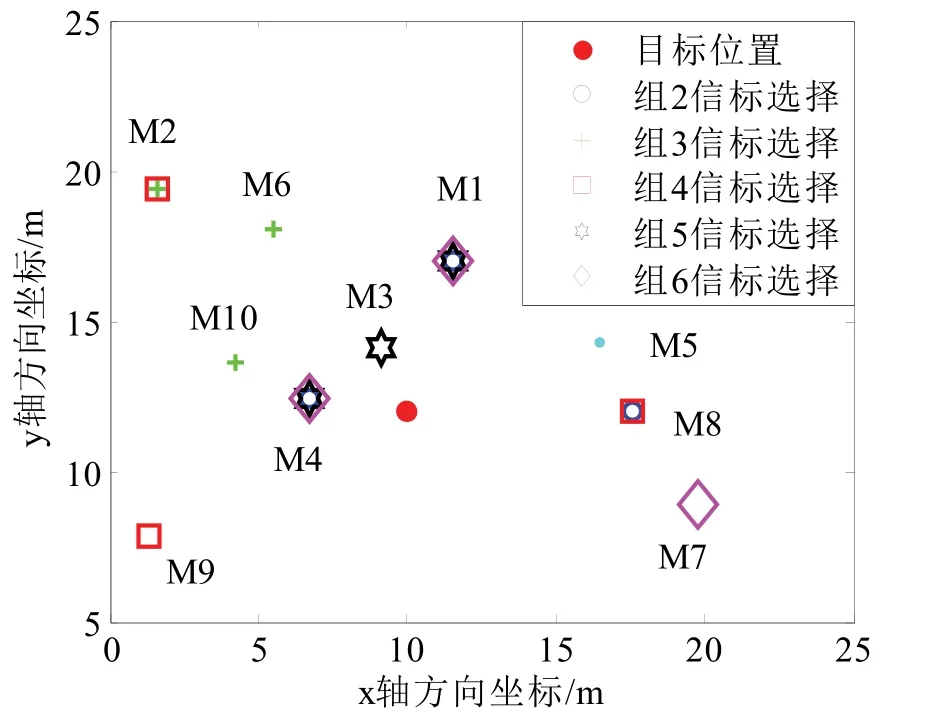
图6 实验中磁信标的分布与选择结果Fig.6 Distribution and selection of magnetic beacon in experiment
再进行蒙特卡洛实验验证,随机改变目标位置200 次,重复上述实验过程,统计根据本文提出方法选择的磁信标组合为最优,精度最高的情况,实验结果如表2 所示,根据本文提出的方法,准确选择得到最优磁信标组合的概率约91.5%,相对于仅依靠距离选择准确率提升近一倍。

表2 选择方法的蒙特卡洛实验对比Tab.2 Comparison of selection methods based on Monte-Carlo verification
4.2 选择方法节约计算资源分析
下面针对本文提出的选择方法,在减少系统资源消耗方面进行分析对比。以第3 章中提到的粒子滤波估计算法为例,在进行选择前,磁信标数量为N,系统状态粒子数量为Z时,设系统对每个状态粒子根据单个磁信标的后验概率,计算一次所占用的计算资源为T,则选择前系统所消耗的计算资源可表示为O(ZNT),经选择后,参与计算磁信标后验概率的磁信标数量变为M,存在M≤N,因此选择后系统消耗的计算资源O(ZMT)满足O(ZMT) ≤O(ZNT)。因此可知通过对参与解算的磁信标进行选择,系统计算资源的消耗降低了,表明本文提出的方法在一定程度能减少系统资源消耗。但根据4.1 中的实验结果可知,减少参与导航解算的磁信标数量会降低导航定位精度。因此在实际过程中需要衡量精度与系统资源消耗情况,制定参与导航解算的磁信标数量约束,以提高资源利用率。
5 结 论
本文针对灵巧无人平台所携带的能源及系统资源有限,在利用多磁信标导航定位过程中,环境中存在过度冗余的磁信标观测信息,占用过多系统资源的问题,提出一种基于置信评估的多磁信标选择方法并进行验证。实验中本文提出的选择方法相对于仅依靠距离选择的方法,最终定位精度提高约13.92%。最优磁信标组合选择准确率提高近一倍。在利用多磁信标导航定位过程中,在目标处可测量到多个磁信标的感应磁场信息,但其中部分磁信标的测量信息较差,对系统导航定位精度的贡献较小,但会消耗与其他贡献度较高的磁信标同样的系统资源,这对于能量及计算资源有限的灵巧无人平台而言是极为浪费的,因此利用本文提出的方法可有效估计各个磁信标对系统精度的贡献,屏蔽部分贡献较低的磁信标,在不明显降低导航定位精度的前提下,利用最少数量的磁信标完成导航定位任务。同时,本文提出的方法还可应用于路径规划等方面,通过评估目标可能经过的路径周围分布的磁信标置信度,选择置信度较高路径,可有效提高目标的导航定位精度。
