城际列车晃车机理试验研究
2019-12-27厉鑫波周劲松夏张辉
厉鑫波,周劲松,夏张辉,吴 尚
(同济大学 铁道与城市轨道交通研究院,上海201804)
随着我国城市轨道交通的高速发展,运营速度的不断提高,由轨道激扰、轮轨磨耗、悬挂参数不匹配、走行部部件疲劳等问题愈发凸显,这将导致车辆运行品质和乘客乘坐舒适性降低,甚至引发安全事故。而晃车现象是运营车辆最为常见的一种偶发性问题。研究发现,转向架蛇行频率随运行速度的升高而增大,而在某一车速下,转向架蛇行频率与车体某阶振型的频率接近时,转向架的蛇行运动与车体的摇头或滚摆运动相耦合,产生严重的晃车现象,从而恶化车辆的运行平稳性[1-2]。文献[3]研究了二系横向刚度和阻尼、二系纵向刚度和阻尼、一系纵向定位刚度、车辆踏面等效锥度、车体质量等参数对车辆蛇行失稳形态的影响,表明蛇行失稳是制约车辆最高车速的因素,并提出基于稳定性的车辆参数设计原则。文献[4]提出一种基于三次样条插值原理的模态追踪方法,并证实轮对模态与车体模态间的振型切换时车体低频横向晃动的本质原因。文献[5]通过实车试验、轮轨外型测量和计算机仿真,分析得到车辆悬架参数、车身质量布置、轮轨接触状态对车辆的横向稳定性具有显著影响。
根据乘客和司机反映,某在线运营的城际列车在有些运行区段内会出现偶发性的车体晃动现象,导致乘坐舒适度降低,影响车辆的运行安全性。本文针对此晃车现象,通过提取车辆运行工况下的振动信号、实测车轮踏面和轨道外型等测试手段,结合理论分析,找出晃车现象的主要原因,并提出针对性的建议。
1 晃车特征提取
针对该运营线上车辆出现的晃车现象,需要获取车辆不同位置处的振动信号,通过车辆运行平稳性分析、时频域分析和信号相干性分析,提取到晃车特征,包括车辆运行平稳性指标、晃车主频以及振动信号传递特征等。
1.1 测试方案
测试中选取该运营线的某编组列车的一节M车作为研究对象,测试过程中,车辆处于AW0 的载荷状态,并以ATO运行模式运行上、下行全程。
城际列车振动的传递路径一般为车轮与轨道相互作用产生激励,通过走行部件传导至车体。为了评价其运行平稳性,研究不同部件之间的振动传递特性,提取车辆的晃车特征,需要获取车体、构架和轴箱的不同位置的振动信号。车体、构架和轴箱上布置了三轴加速度传感器,传感器参数如表1所示。车体测点分布在一、二位端的地板和天花板角上;转向架测点如图1所示。
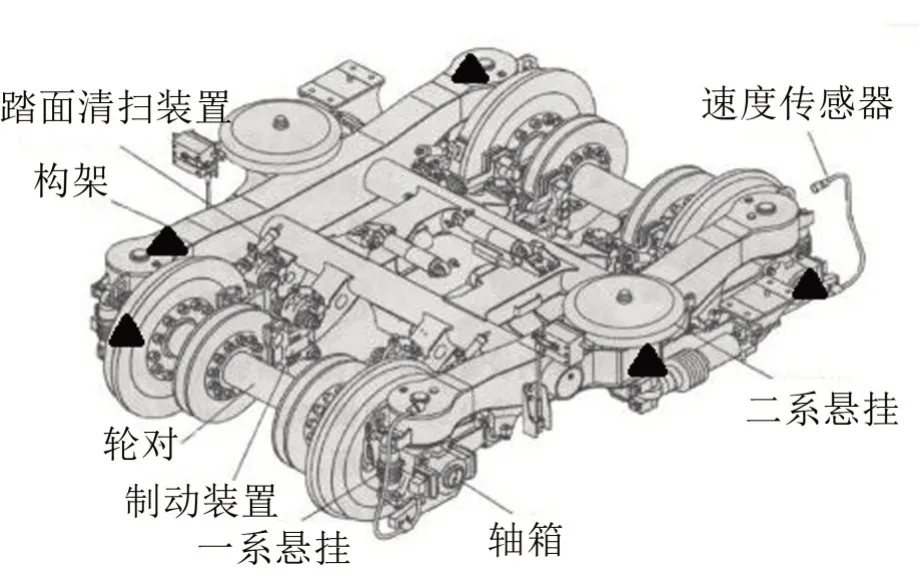
图1 转向架测点分布示意图
测点分布在构架端部和异侧中点处以及轴箱对角处。每个测点采集横向和垂向振动信号。
1.2 平稳性分析
包括我国在内,欧洲铁路联盟以及前社会主义国家铁路合作组织均采用Sperling 提出的平稳性指标来评价车辆的运行品质[6]。式(1)是基于人体对于不同频率的舒适性感受进行加权处理的车辆舒适度评价。客车运行平稳性指标的评价等级分为3 级:平稳性指标小于2.5为优;2.5至2.75为良好;2.75至3.0为合格[7]。

式中:A为振动加速度,g;f为振动频率,Hz;F(f)为频率修正系数,如表1所示。
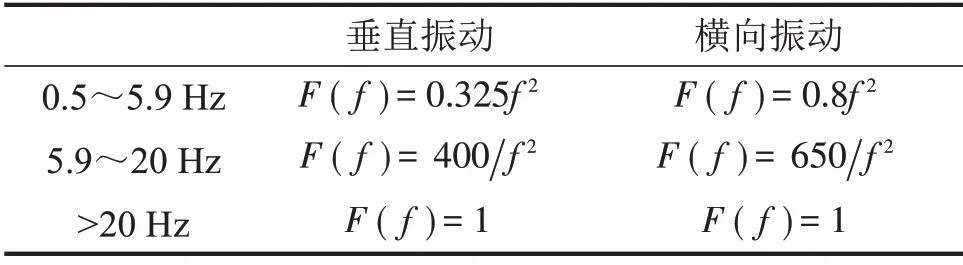
表2 频率修正系数
为了解车辆舒适度水平及晃车时间段,计算车辆全程运行速度对应的车辆运行平稳性,步长为20 s。图2、图3为车体测点的垂向与横向的运行平稳性指标。

图2 随速度变化的垂向平稳性

图3 随速度变化的横向平稳性

表1 加速度传感器参数
从图中可以看出,运行速度与运行平稳性趋势基本一致;车体垂向运行平稳性指标均比较小且小于2.5,运行平稳性等级为优;车体横向运行平稳性指标在多个时间段内大于2.5,并且在1 560 s~1 900 s 内有部分平稳性指标大于2.5甚至超过3,运行平稳性等级为不合格。将1 560 s~1 900 s的采样时间段记为晃车时间段。
1.3 时域对比
图4至图9为晃车和非晃车时间段内截取的车体、构架和轴箱的横向时域信号。
从图中可以发现,振动能量由轴箱至车体不断衰减,相较于非晃车时间段,发生晃车时,车体和构架都出现了明显的低频谐波信号,而轴箱未见明显异常。这一现象可以说明车体和构架在晃车时间段中均出现了横向低频振动,明显异于非晃车时间段的车辆运行状态,而轴箱受刚性约束未表现明显晃动。
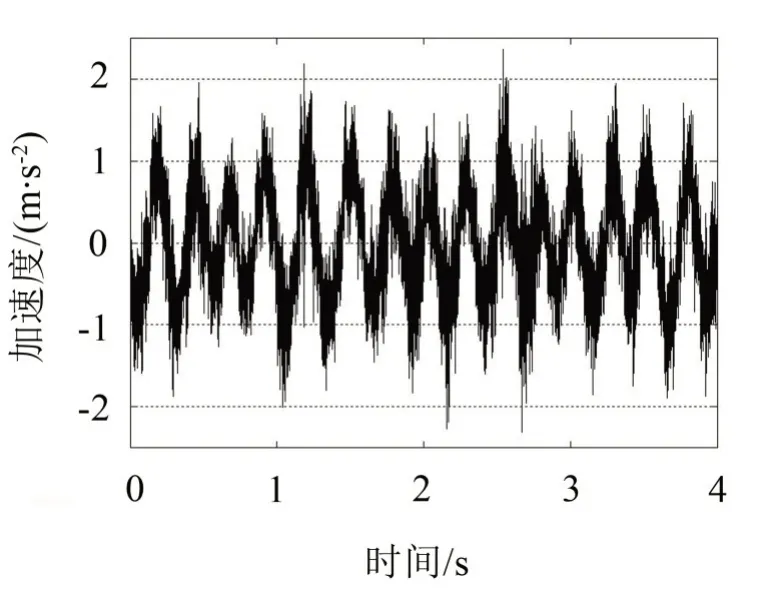
图4 晃车时间段车体横向时域信号

图5 非晃车时间段车体横向时域信号

图6 晃车时间段构架横向时域信号

图7 非晃车时间段构架横向时域信号
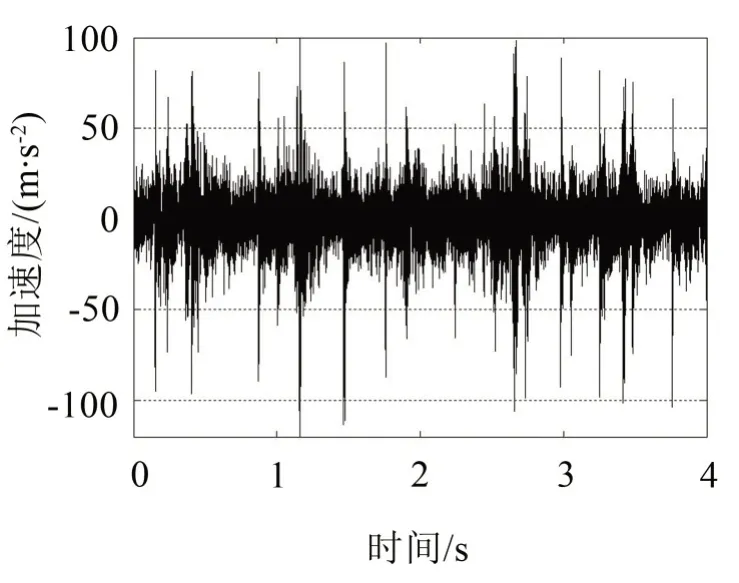
图8 晃车时间段轴箱横向时域信号

图9 非晃车时间段轴箱横向时域信号
1.4 时频域对比
图10至图13为晃车及非晃车时间段内截取的车体和构架的横向振动的时频域信号。
从图中可以看出,当出现晃车现象时,车体和构架均出现4 Hz 左右的主频峰值且能量较高。当车辆未晃车时,车体主频在1.58 Hz 左右,而构架在频谱中能量分布离散,没有明显的主频。
1.5 相干性分析
分析车体和构架之间传递的振动信号的相干特性。
图14为晃车及非晃车时间段内车体和构架相近测点的相干性。

图10 晃车时间段车体横向时频域信号
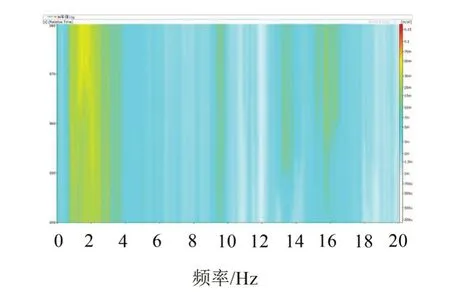
图11 非晃车时间段车体横向时频域信号

图12 晃车时间段构架横向时频域信号

图13 非晃车时间段构架横向时频域信号
从图中可以发现,车体与构架的横向振动信号在4 Hz 左右相干系数接近1,说明车体的晃动现象与构架存在很大的相关性,可以初步证实晃车的主要能量是由转向架传递过来的。
然而,与其他数字化资源一样,在享受信息时代网络化带来的便利之时,数字化唐卡图像同样面临着未经授权的复制、传播,甚至假冒和恶意篡改等问题,严重侵犯了版权所有者的合法权益。此类图像安全信任危机不予解决,将严重阻碍藏文化网络传播和唐卡产业化发展进程。目前,唐卡图像的研究工作主要集中在唐卡数字化保护、唐卡图像修复[3,4]、唐卡图像检索[5,6]等方面,针对唐卡图像数字化后的图像信息安全问题的研究尚属空白。本文试图在唐卡数字化图像版权保护和认证方面展开研究工作。
2 晃车原因分析
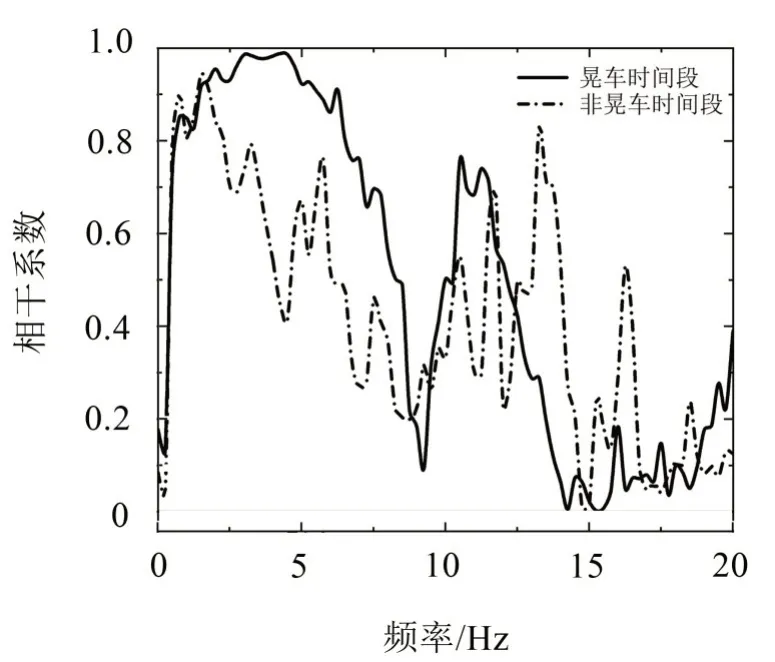
图14 晃车与非晃车时间段车体和构架的相干性
分析提取出的车体、构架和轴箱的晃车特征,可以发现车体的晃动现象总是伴随着转向架的晃动而出现。通过整车ODS分析、转向架稳定性分析和计算蛇行频率,对晃车原因作进一步的解释。
2.1 ODS分析
工作变形分析(ODS)又称运行响应模态分析,ODS 是各阶模态在某一时刻或频率下的线性叠加。对于运行的车辆,其激励是难以测得的,那么根据频域ODS分析便能识别出车辆的主频振型,还原车辆在晃车工况下的实际姿态。
图15为晃车时间段内的车辆振型动画。从图中可以发现,车辆的固有频率为4.11 Hz,阻尼比为3.86%。根据设计经验,车体的固有频率一般不超过2 Hz,可以判断晃车段的4 Hz左右固有频率实则为车体与前后转向架耦合振动的结果,表现为转向架蛇行与车体摇头反相耦合。

图15 晃车时间段整车振型动画
2.2 稳定性分析
根据ODS 分析推测得到晃车现象是一种接近以转向架为主振型的二次蛇行运动。这是一种由系统内部的非振动能量转换为振动的激励而产生的自激振动。二次蛇行出现在较高的运行速度下,其振动频率高于车体固有频率,将严重影响车辆系统的稳定性。根据标准UIC518,对构架进行稳定性分析。先对构架的振动加速度信号添加一个带通滤波器,频率范围为所关心的稳定性频率正负2 Hz 左右,其阻带衰减率应大于或等于24 dB/倍频程,再以10 m 为滑动增量,计算每100 m 内的滑动均方根值[8]。图16展示了晃车及非晃车时间段内构架的稳定性。

图16 随距离变化的转向架稳定性
从图16中可以发现,当出现晃车时,转向架的稳定性大大降低。
2.3 计算蛇行频率
根据实测晃车与非晃车线路段的轨道外型,计算实测车轮踏面的等效锥度,如图17所示。

图17 晃车与非晃车线路段等效锥度
从图中可以看出,晃车与非晃车线路段的轮轨匹配等效锥度无显著差异,其等效锥度均值在0.25左右。由此确定轨道因素不是产生晃车现象的主要原因。
利用上述求得的等效锥度,根据式(2)蛇行频率计算公式,求得蛇行频率为3.94 Hz。此计算结果与提取的晃车主频以及根据ODS 分析识别的振型频率基本一致,证实是由转向架稳定性不足形成蛇行运动导致晃车,并验证了试验结果的可靠性。

式中:λ为车轮踏面等效锥度;b为滚动圆间距;r0为轮对名义滚动圆半径。
3 结语
对研究对象的车体、构架和轴箱的振动信号进行采集,先对其进行平稳性评价,区分晃车与非晃车时间段,再对振动信号进行时频域分析,计算车体和构架之间的振动信号传递的相干性,提取晃车特征,然后对测试结果进行ODS分析和构架稳定性分析,再计算蛇行频率。通过以上分析过程,给出以下结论和建议:
(1)由于晃车时车体的频率在4 Hz 左右,该频率非车体自身的固有频率,所以排除激励频率与车体固有频率接近导致的共振,而晃车与非晃车线路段的轮轨匹配等效锥度无显著差异,确定轨道因素非主要原因,由此推断是由于车辆系统稳定性裕量不足,转向架接近蛇行失稳导致的车体晃动;
(2)在保证运营效率和运行安全的前提下,适当降低车辆运行速度,同时可以缩短车辆璇轮周期,定期养护走行部的关键部件,提高车辆系统蛇行运动稳定性。
