基于小尺度船模技术的小半径回头弯曲航道试验研究
2019-12-17蔡新永
蔡 创,蔡新永
(1. 重庆交通大学 河海学院,重庆 400074; 2. 重庆西南水运工程科学研究所,重庆 400016)
0 引 言
回头弯曲航道的水流条件非常复杂,主流、横流、斜流及回流等多种流态的组合给船舶通航安全造成了很大威胁,尤其是对下行船的航行安全影响更大。下行船转向时,在惯性离心力、舵的横移力和扫弯水作用方向一致的情况下,船体容易发生扫岸、触坡等事故[1]。弯曲航道的水流状况对船舶通航安全的影响受到越来越多的关注。
当今,多数航运发达国家研究内河通航问题,通常采用一项新技术——自航船模技术。而内河通航研究所采用的自航船模,由于受水工和河工模型比尺的限制,船模尺度一般都很小,其制作工艺要求高,很难达到与实船的运动和操纵性完全相似[2]。在船舶通航研究中采用小尺度自航船模进行试验,相对于常规的水工、河工模型水流条件量测试验,其最大的优点就是能更直观、真实地反映航道水流条件和边界条件对船舶通航的综合影响以及船舶与航道水流条件的相互作用。通航小尺度船模技术在人工通航建筑物设计和天然航道整治研究中,很有应用价值[3]。即使在数学模型广泛应用的今天,自航船模物理模型试验仍不可或缺,与数学模型互相验证补充,并且,物理船模试验还为数学模型通航研究提供了大量基本参数和边界条件[3-7]。
琵琶洲弯曲航道的航道弯曲半径r=360~480 m,在流量Q=1 160~7 550 m3/s的通航水流条件下,为保障上、下行船只安全顺利通行,笔者开展了自航船模试验,提出了琵琶洲弯曲航道的船舶最佳驾驶方式和通航难点。研究结论可为琵琶洲弯曲航道整治方案设计提供参考。
1 研究河段概况
研究河段主要集中在琵琶洲急弯河段,地处浯溪枢纽库区,位于浯溪大坝上游约15 km处,包含弯道中部上、下游各约3.1 km,共6.2 km长的河段,平面上为典型的回头弯U型河段,如图1。此河段水深较大,河心自然弯曲,半径仅约360 m。洪水期水流流速大,弯道扫弯水强烈,通航条件较差,对过往的船舶通航安全造成很大威胁。

图1 琵琶洲弯道平面图Fig. 1 Pipazhou curved channel plan
2 小尺度船模试验
2.1 小尺度船模

工程设计优化所用的代表船型为1 000 t级机动货船,船模与实船的相关参数见表1。
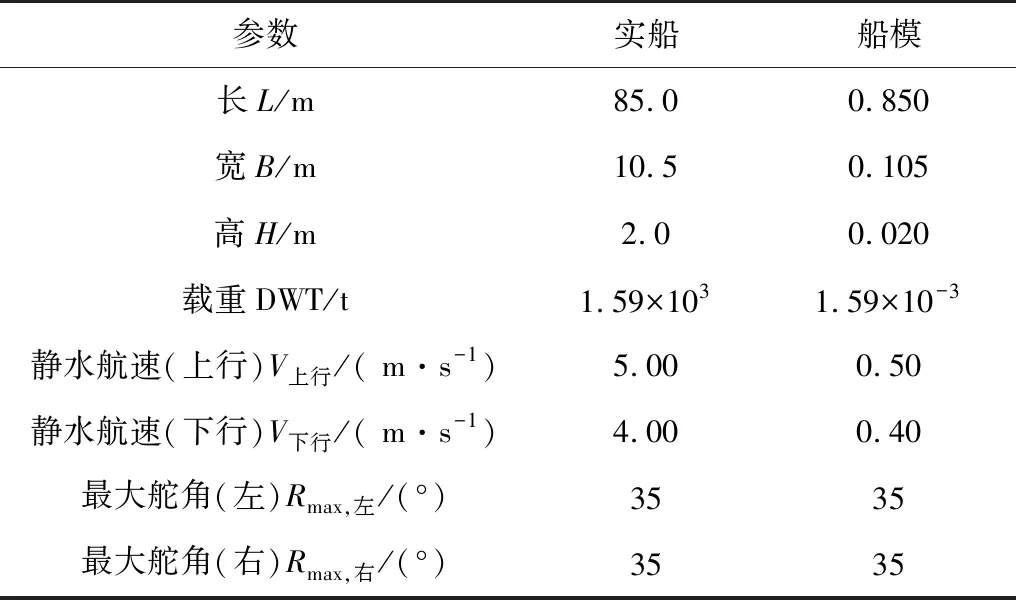
表1 船模与实船参数Table 1 Parameters of ship model and real ship
通过操纵性能率定和尺度效应修正,小比尺船模符合实船操纵性能相似,且比实船航行时偏安全[8]。船模采用减少边舵面积修正后与实船操纵性指数比较见表2。
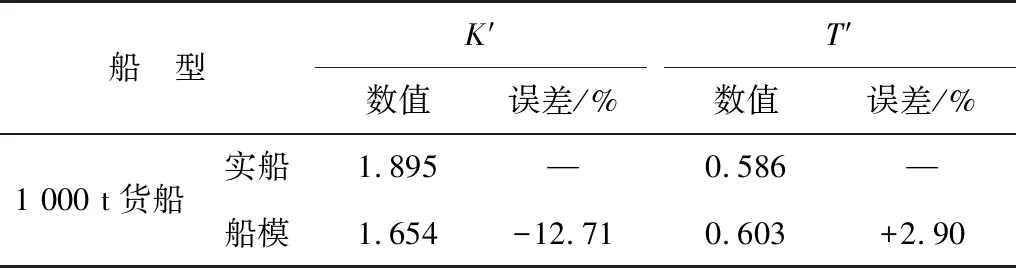
表2 1 000 t实船的操纵性指数与船模校正后的操纵性指数对比Table 2 Comparison between maneuverability indexes of 1,000 t real ship and corrected maneuverability indexes of ship model
2.2 试验方案
船模试验航段为琵琶洲急弯河段,总长约1 500 m,如图2。琵琶洲滩段虽然为急弯,但满足2.40 m航深的宽度较大,最窄处约200 m,通航水域较为宽阔。为了较好分析航槽内水流条件,笔者对预设的3个航槽和自选航线进行了船模试验研究。
1)方案1:航槽按弯曲半径r=360 m(稍大于本工程的设计标准4倍船长340 m)布置,航槽范围内均满足航深要求,且两岸距离富裕较大。
2)方案2:航槽按弯曲半径r=440 m于河中布置,留足右边距岸距离。航槽范围内均满足航深要求,且两岸距离基本可行。
3)方案3:航槽按弯曲半径r=480 m,靠左岸布置,右边距岸最小距离留足约30 m。除左侧弯顶下段不满足航深要求外,其余部分均满足,不满足部分可通过适当切嘴加以解决。
4)方案4:船模试验自选航线,沿缓流区抱凸岸上行,顺江心主流下行。

图2 船模试验Fig. 2 Ship model test
为了较为准确地获得各级流量的水流特性和通航水流条件,根据浯溪枢纽、潇湘枢纽的主要运行方式,结合主要特征通航流量等参数,笔者主要研究了以下4个代表流量工况下的通航水流条件:
1)工况1:Q=1 160 m3/s,浯溪4台机组满发不泄洪;
2)工况2:Q=4 000 m3/s,浯溪4台机组满发控泄;
3)工况3:Q=6 000 m3/s,浯溪4台机组满发控泄;
4)工况4:Q=7 550 m3/s,浯溪停机控泄,P=20%洪水。
船舶航行过程中,影响船舶航行状态的主要因素包括通航水域水流条件、船舶本身的动力特性和船舶操纵性能等,而船舶航行状态常通过航行轨迹、舵角R、漂角D、车档、航速V等航行参数来体现[2]。国内在研究三峡枢纽和许多内河航道的通航条件时,对小尺度船模航行过程中的舵角R及航速V作了相应的限定,即最大舵角Rmax≯25°,最小航速Vmin≮0.4 m/s,以此来判别航行状态的优劣[8]。通常,船舶的最大舵角Rmax=35°,但安全舵角须控制在25°以内,主要基于2个因素:①如果船舶航行中使用满舵才能避免危险,那么说明船舶已经处于发生事故的临界状态;②一般模型试验中都会存在一定的误差,为确保船舶通航必须留有一定的安全余地。小尺度船模的舵角和航速等航行参数如果劣于上述限值,则认为航道通航处于不安全状态[2]。
为了减小船模试验结果的随机误差,保证试验结果的真实可靠,对各个代表通航流量工况进行多航次试验,并对试验结果进行统计分析,用其特征值来判别航道通航条件的优劣。
3 船模试验结果及分析
3.1 不同航槽方案的试验结果分析
对于不同航槽方案,笔者主要进行了河段最高通航流量Q=7 550 m3/s(P=20%洪水)下无工程措施布置方案的通航试验研究。在Q=7 550 m3/s工况下,1 000 t级机动货船在航槽半径r=360、440、480 m和自选航线航行时的船模试验结果见表3。
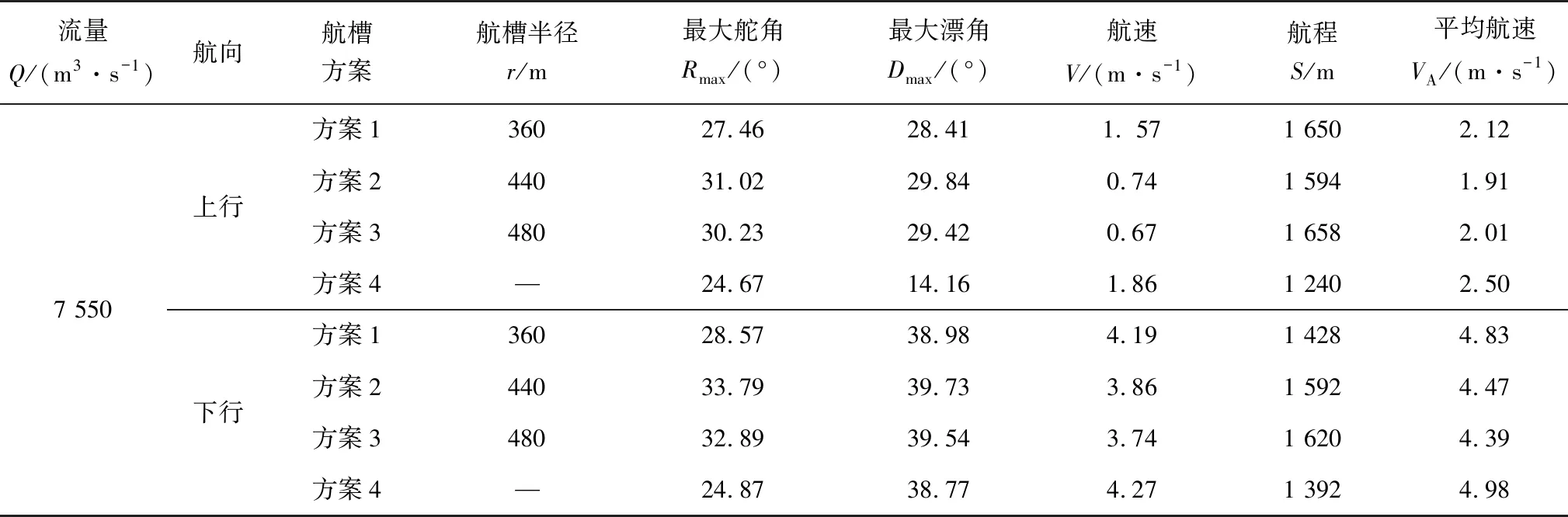
表3 不同航槽方案船模试验结果汇总Table 3 Summary of ship model test results with different channel schemes
从表3可以看出:
1)在方案1~方案3中,由于设计航道中较强的横向流速(在弯道上段,横向流速达到1.00 m/s),妨碍船舶航行,船舶上、下行的舵角均已超过25°(船模试验最大舵角限值),航行安全已不能保证。而且,在航槽半径r=440、480 m时,最小上行航速Vmin,上行=0.74、0.67 m/s,已接近船模试验最小航速限值0.40 m/s,不可能再向上提升通航流量。
2)在自选航线时,船舶上、下行的最大舵角Rmax,上行=24.67°、Rmax,下行=24.87°,均小于船模试验最大安全舵角限值25°;上行最小航速为Vmin,上行=1.86 m/s,优于船模试验最小航速限值0.40 m/s,船舶可自航通过弯道河段。船模自选航线(即沿左岸缓流区抱凸岸上行、顺江心主流下行),明显优于其他3个预设航槽方案。原因是这3条预设航槽方案中均有较高的横流,必须用很大的舵角才能保持船舶在航道中航行,而船模自选航线上行、下行均是顺水势航行,航线上横流较小,船舶航行条件比其他3条预设航槽方案好,但由于船模试验上、下行最大舵角已接近船模试验最大舵角限值25°,为确保安全需谨慎驾驶。
3.2 不同流量工况的通航条件比较分析
对于不同通航流量,笔者主要对河段无工程措施和工程措施优化这2种布置方案进行了通航试验研究。船模试验结果见表4。船舶上、下行参数比较见图3。
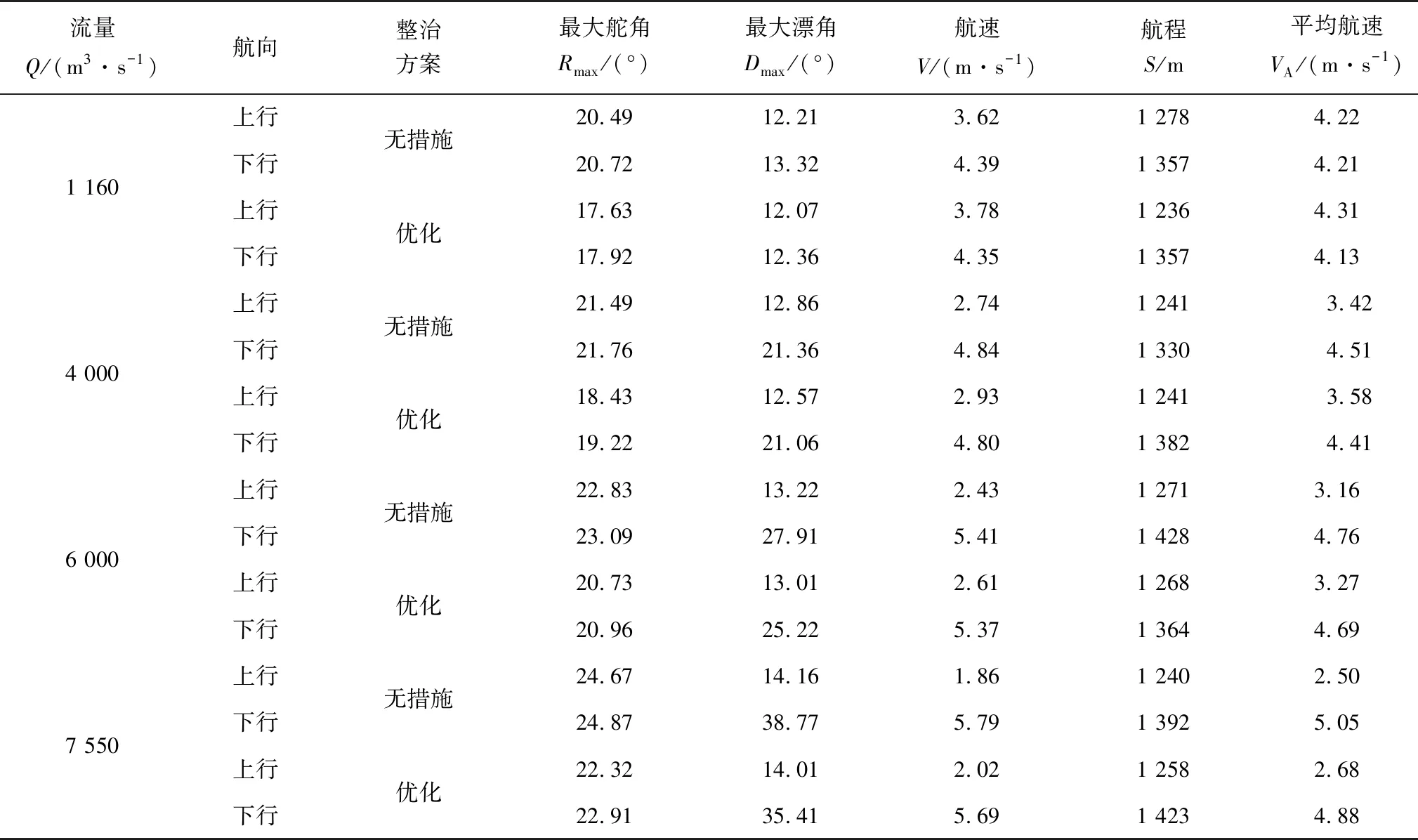
表4 不同流量船模试验结果汇总Table 4 Summary of ship model test results with different flow conditions
注:所有数据均已换算为原型值。
图3 不同流量上、下行航行参数Fig. 3 Navigation parameters of sailing up and down with different flow conditions
从表4及图4可以看出,1 000 t级机动货船在Q=1 160、4 000、6 000、7 550 m3/s这4种流量工况下,具有以下特性:
1)上行的最大舵角Rmax,上行、最大漂角Dmax,上行均随流量Q的增大而增大,上行最小航速Vmin,上行、平均航速VA,上行均随流量Q的增大而减小,上行难度随流量Q加大而增加。
2)下行的最大舵角Rmax,下行、最大漂角Dmax,下行均随流量Q的增大而增大,下行最大航速Vmin,上行、平均航速VA,下行均随流量Q增大而增大,下行难度随流量Q增大而增加。
4 建 议
4.1 最佳航线和驾驶方式
根据船模试验,选择出最佳航线和驾驶方式:沿左岸缓流区抱凸岸上行,沿江心主流下行。
4.1.1 1 000 t级机动货船上行
在弯道下游300~500 m处即沿左岸缓流区上行,先保持岸距50~100 m上行,逐步向弯道下口凸岸靠拢,在船舶靠近凸岸时保持岸距40~50 m,适时操右舵,抱凸岸右转上行,右转后继续沿凸岸保持岸距50~60 m左右上行,在弯道上口适当操舵调整航向驶出弯道,继续驶向上游。
4.1.2 1 000 t级机动货船下行
在弯道上游沿江心进入弯道,沿江心顺主流水势下行,操纵难度最小。下行船舶在弯道上口适当操左舵,顺江心主流入弯,过弯过程中,适时左右用舵调整航向和航线,沿弯道中部,顺流通过弯道。
4.2 航行难点
4.2.1 上行难点
在弯道下口抱凸岸右转上行的操纵,保持适当的岸距(40~50 m)和操舵时机(船头接近弯道下口凸岸时及时操右舵)均很重要,岸距过远过近,操舵过早过迟均不利于抱凸岸右转,要恰当掌握才能顺利右转过弯。
4.2.2 下行难点
在船舶驶出弯道下口时要注意用舵控制好航线和船向,既要适当操左舵,避免船舶被水流甩向凹岸,又要在船舶驶出弯道下口时及时适当操右舵,避免船舶转向过度而船头偏向凸岸,才能顺利通过弯道下行。
5 结 论
1)在航槽半径r=360、440、480 m时,由于航道中较强的横向流速(在弯道上段,横向流速已达1.00 m/s),妨碍船舶航行,船舶上、下行的舵角R均已大于船模试验最大安全舵角限值25°,船舶航行安全已得不到保证。在自选航线时,船舶上、下行的舵角R均低于船模试验最大安全舵角限值25°,上行最小航速Vmin,上行均高于船模试验最小航速限值0.40 m/s,船舶可自航通过小半径回头弯曲航道。
2)琵琶洲弯道不同方案的船模试验成果,都呈现出上、下行舵角R、漂角D随流量Q增大而加大,上行航速V上行随流量增大Q而减小,航行难度随流量Q增大而增加的规律。这是因为随着流量Q的增加,琵琶洲弯道航线上的纵向流速和横向流速都加大,船舶上滩的难度和过弯航行的操纵难度也随之增加,航行难度增加。
