Predictive car-following scheme for improving traffic flows on urban road networks
2019-12-09BAKIBILLAHMahmudulHASANMdMustafijurRAHMANMdAbdusSamadKAMAL
A.S.M.BAKIBILLAH, Mahmudul HASAN, Md Mustafijur RAHMAN, Md Abdus Samad KAMAL
1.School of Engineering,Monash University,Bandar Sunway,Selangor,Malaysia;
2.Technology Operations Department,Grameenphone Ltd.,Dhaka,Bangladesh;
3.Department of Electrical and Electronic Engineering,Manarat International University,Dhaka,Bangladesh;
4.Division of Mechanical Science and Technology,Graduate School of Science and Technology,Gunma University,Japan
Abstract Driving behavior is one of the main reasons that causes bottleneck on the freeway or restricts the capacity of signalized intersections.This paper proposes a car-following scheme in a model predictive control(MPC)framework to improve the traffic flow behavior, particularly in stopping and speeding up of individual vehicles in dense urban traffic under a connected vehicle(CV)environment.Using information received through vehicle-to-vehicle(V2V)communication,the scheme predicts the future states of the preceding vehicle and computes the control input by solving a constrained optimization problem considering a finite future horizon.The objective function is to minimize the weighted costs due to speed deviation,control input,and unsafe gaps.The scheme shares the planned driving information with the following vehicles so that they can make better cooperative driving decision.The proposed car-following scheme is simulated in a typical driving scenario with multiple vehicles in dense traffic that has to stop at red signals in multiple intersections.The speeding up or queue clearing and stopping characteristics of the traffic using the proposed scheme is compared with the existing car-following scheme through numerical simulation.
Keywords: Car-following scheme, model predictive control, vehicle string, connected vehicle environment, distributed control
1 Introduction
Over the past few decades,the increase in traffic demand on urban road networks leads to series traffic congestion in many countries. Traffic congestion not only reduces the capacity of a road network but also increases energy consumption,greenhouse gas(GHG)emissions,and travel time of vehicles significantly. According to a report by United States Energy Information Administration, the transportation sector accounts for about 28%of the total U.S. energy consumption [1]. Another report by United States Environmental Protection Agency reveals that transportation sector is the second largest source of emissions in the U.S. that contributes about 29% of the total U.S. GHG emissions [2]. In Europe,the external costs of traffic congestion alone amount to 0.5% of community GDP and by 2050, the congestion costs will increase about 50%[3].Specifically,signalized intersections and merging roads are the main sources of bottleneck, where drivers perform acceleration, braking, and idling frequently [4,5]. This is due to the fact that human cannot anticipate future road traffic situations properly and apply perfect knowledge of engine dynamics for optimal energy efficiency. Field studies show that stop-and-go vehicles cause 14% more energy consumption and emissions than vehicles drive at constant speed [6]. Therefore, policymakers and automotive researchers are looking for different sustainable road transportation technologies to reduce traffic congestion,fuel consumption,and emissions.
There are different physical factors, e.g., characteristics (type and size) of the engine and its power train system,relationship between vehicle structure and aerodynamic drag,road surface and weather conditions that affect the energy consumption and emissions of a vehicle [7,8]. Hence, various technologies have been developed, such as hybrid vehicles, lightweight automobile,efficient power train systems,and advanced engine control systems [9,10]. However, recent studies have shown that energy consumption of a vehicle is highly influenced by driving behavior [11-13]. An energy efficient driving behavior would be to predict what is happening in the road ahead and perform smooth acceleration, drive at optimal speed, and slowly decelerate at stops,which is hardly possible for a human driver.
With the advancements of connected and automated vehicle (CAV) technologies, it becomes possible to access and share data with other vehicles and infrastructure in real-time using vehicle-to-vehicle (V2V)and vehicle-to-infrastructure (V2I) or infrastructure-tovehicle(I2V)wireless communication.Having such necessary information, it is feasible to control the trajectory and movement of individual vehicle to improve energy efficiency,driving safety,and mobility under a connected vehicle environment [14,15]. In the automated car-following scenario, the purpose of the controlled host vehicle is to reduce fuel consumption and engine emissions compared to its preceding vehicle.
A number of studies on the technology and applications of connected and automated vehicles has been found in the literature. Some researchers proposed cooperative following (CF) using longitudinal control of automated vehicles combined with V2V communication[16].It enables serious braking maneuvers anticipating emerging shock waves in order to smooth traffic flow and improve traffic safety. The authors showed better string stability at a platoon level,however,they could not achieve potential advantages on traffic flow efficiency.Some works developed cooperative adaptive cruise control(CACC)systems using V2V communication that can drive vehicles safely with very short headway by forming platoons and thus,increase traffic-flow capacity of a highway lane[17,18].However,in conventional CACCs multiple vehicles are controlled in a platoon without any prediction of their future states. Other approaches utilized I2V communication between the controlled vehicle and upcoming traffic signals to optimize travel time duration and fuel consumption [19-21]. The authors used receding horizon optimization technique to improve trip time and energy consumption assuming that the scheduling of traffic signals and travel route are known. However, they did not consider influences of other traffic participants. Similarly, in [22], the authors proposed energy consumption reduction strategies for plug-in hybrid electric vehicles (HEVs) using upcoming traffic signal timing and headway information.
On the other hand, some researchers developed smart driving strategy using MPC system for a single vehicle by predicting its preceding vehicles for smooth traffic flow [23]. The authors showed that any shock waves of traffic density would be eliminated in the following traffic. Some other work proposed a nonlinear MPC scheme to control the host vehicle’s longitudinal motion dynamics using V2V and I2V communication[24].It is also demonstrated that without using I2V communication,self-driving data can be effectively used to realize eco-driving in a signalized intersection[25].
In this work,a predictive car-following scheme is developed using MPC to improve traffic flow performance by implementing on multiple vehicles in a distributed control approach. The novelty of the scheme is to take into account the dynamics of the respective PV explicitly by predicting its future trajectory using a conditional persistent prediction approach.The scheme can by implemented easily for distributed control of the traffic that requires limited communication volume between vehicles. Particularly, this paper evaluates the potential improvements in traffic performance when multiple vehicles are controlled by the proposed scheme and justifies through analyzing microscopic behavior at starting and stopping maneuver of the consecutive vehicles.It is found that the proposed scheme smoothly deals with the speeding or stopping behavior of vehicles compared to the traditional car-following scheme and thus,improves driving performance of vehicles significantly.
2 Microscopic car-following behavior
Consider an arbitrary vehicle n following its preceding vehicle on the same lane denoted by n-1 as illustrated in Fig.1.We assume that the driver or the automated driving system perfectly controls the lateral movement of each vehicle.It is necessary to regulate a safe distance in order to drive the vehicle n by adjusting the speed appropriately,and this process of longitudinal motion control is known as car-following. For the convenience in developing an effective car-following scheme,this section discusses the fundamentals of vehicle dynamics in longitudinal motion,an existing representative car-following model and its limitations.

2.1 Vehicle dynamics
Let sn= [pn,vn] ∈R2denotes the state of vehicle n,where pnand vnare position and velocity of the host vehicle, respectively. The control input or acceleration an∈R is decided according to the driving context,e.g.,presence of a preceding vehicle,traffic signal,and road speed limit.In the formulation,we consider a discretetime framework. Then, the longitudinal state dynamics of vehicle n in discrete-time can be given by

where k denotes a time step of interval Δτand the coefficient matrices are given by
The vehicle driving task considered here is to determine an. How a human driver decides control input anin the driving context has been an active research area for several decades,and various car-following models have been developed to represent human driving behavior.
In this framework,at the kth step,the control input is updated as

For simplicity, let an(k) refer to an(kΔτ), and the same applies for the other variables,henceforth.
2.2 Traditional car-following model
In the case of human driver car-following,for convenience we termed as traditional car-following (TCF), it is assumed that acceleration andepends on the states of both vehicles n and n-1, and it can be given by a function fCFas

Several car-following models,e.g.,Gipps model[26],optimal velocity model (OVM) [27], and intelligent driver model (IDM) [28] were developed that can approximately replicate human driving behavior related to longitudinal motion of the car[29].The Gipps model is one of the primitive and popular models, which computes control acceleration as a discontinuously varying quantity based on safety considerations with the preceding vehicle.The OVM,where acceleration is considered as the function of optimal velocity, is defined in term of the headway gap.The OVM can replicate shock waves in traffic, and it is widely used to analyze traffic breakdown.However,the OVM often produces unrealistic(unbounded)deceleration,since the relative speed of the front vehicle is ignored in deciding acceleration.The IDM, a recently well studied car-following model,uses a few model parameters that have clear meaning in the context of traffic flows,and provides acceleration as a smoothly varying quantity with guaranteed collision avoidance.
In this study,the IDM[28]is used as the human driving car-following, fCF,which is expressed as

where the current gap to the preceding vehicle is Δpn=pn-1-pn,the desired gap is d*(vn,vn-1),which is defined as

and parameters ν,s0,T,a,and b denote the desired free flow speed,minimum spacing,minimum time gap,maximum acceleration,and desired deceleration.Typically,these model parameters vary among human drivers.
The limitation of this car-following model is that it only consider the current states of both vehicles and ignores the acceleration of the preceding vehicle within the function.Although it is easy to measure the acceleration by a human driver or determine from noisy sensor data, however, it is also possible to estimate the acceleration in starting up from a queue or stopping to a red signal.Therefore,the trend(acceleration pattern)of the preceding vehicle can be guessed using such additional information, and it is possible to estimate the future states (a few second ahead) of the preceding vehicle.Next,an efficient car-following model is developed considering the trend of the preceding vehicle.
2.3 Predictive car-following scheme
Consider an automated or a semi-automated vehicle with a long-term goal of effective driving by calculating its control acceleration depending on the state of the preceding vehicle. Specifically, it is assumed that acceleration of the host vehicle can be determined by predicting the state of the preceding vehicle according to a given objective function,and such a predictive carfollowing(PCF)scheme fPCFcan be expressed as

For the development of such a PCF scheme, the following assumptions are made:i)Information of the position, velocity, and acceleration are available instantly through on board senors or inter-vehicle communication technology. ii) The motion of human driven vehicles in the traffic can be approximated by a car-following model, e.g., TCF using mean parameters of the traffic.These vehicles may have different driving behavior due to variation in their driving parameters and preferences.
For controlling a vehicle, some constraints are defined considering the safety-comfort in driving and rulesregulation relevant to a road network, such as velocity vnis bounded by the inequality constraint

and acceleration input anis assumed to be bounded by the inequality constraint

Some additional constraints are necessary for safe driving in the traffic to avoid any collision with other vehicles.The minimum gap from the preceding vehicle n-1 in any situation is given by the constraint

where t0is the minimum time headway and R0is the minimum gap between the vehicles at the stand still condition.
Then the proposed predictive car-following scheme is given by


subject to
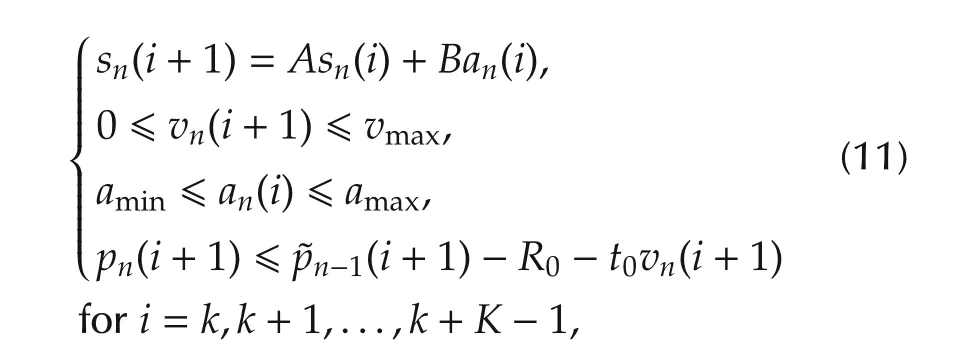

where
The exponential function in (12) is a discount factor to ensure that the current acceleration decays over time and the function θ(sn) forced it to be zero, if a vehicle reaches above the maximum limit V2or below the minimum limit V1[31].Hence,the state at the next step can be calculated by(1)using the estimated acceleration and by repeating the process for the future positions of the preceding in the horizon, i.e.,can be estimated independently.
Therefore, the performance index of the proposed predictive car-following scheme is defined as
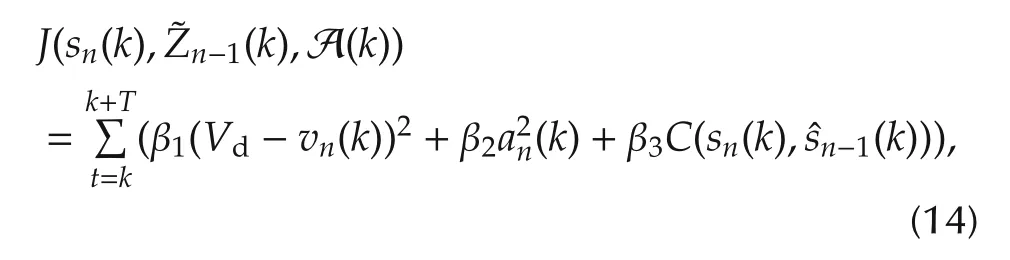
where Vdis the reference(desired or set)velocity,β1,β2and β3are constant coefficients.The first term denotes the cost due to deviation from the reference speed,the second term is the cost due to acceleration or deceleration.Both terms directly influence the fuel consumption of the vehicle. The last term represents a cost due to a short time gap with the preceding vehicle. Particularly,the function C denotes penalty when the time headway reduces from the desired value while following the preceding vehicle,and the function is defined as

where td.minis the desired minimum time headway,tn= (pn-1-pn)/(vn+∊) is the time headway, and α is a constant. In time headway calculation a constant ∊is added to avoid singularity at vn= 0. In the next section, the evaluation of the proposed PCF is presented based on simulation.
3 Simulation results
To evaluate the performance of traffic using the proposed car-following scheme, a microscopic simulation framework is developed in MATLAB and an optimization problem is solved in discrete time using the optimization toolbox of MATLAB. The parameters of the car-following schemes, i.e., TCF and PCF are suitably set as follows. The parameters of the TCF are typically chosen as: the time gap T = 1.4 s, the maximum acceleration a = 1.5 m/s2, the desired deceleration b = 3.0 m/s2,the desired speed Vd= 65 km/h,and the minimum gap S0=1.5 m.The parameters and preferences of the proposed PCF are suitably set as: the weights β1= 0.2, β2= 15, and β3= 200, the reference speed Vd= 65 km/h, the gap constant td.min= 0.75 s,∊=0.2,and α=10.
For the same gap,the relative speed(positive or negative)of the vehicle(with respect to the preceding vehicle)is an important factor in deciding the control input.Therefore,using the following two cases,for both positive and negative relative speeds,the control inputs(acceleration) generated by the PCF scheme is compared with the TCF.
.Case I:The speed of the host vehicle is 40 km/h and it is located 20 m behind the preceding vehicle that has a speed of 35 km/h.
.Case II:The speed of the host vehicle is 35 km/h and it is located 20 m behind the preceding vehicle that has a speed of 40 km/h.
For each case,the acceleration of the preceding vehicle is varied from -1.5 m/s2to 1.5 m/s2and the corresponding control input of the host vehicle is calculated using these schemes as plotted in Fig.2.In both cases,the PCF scheme generates higher or lower control inputs according to the acceleration or deceleration of the preceding vehicle. In contrast, the TCF scheme always shows a constant control input for any acceleration rate of the preceding vehicle.
It is noticed that when the relative speed is negative and it is expected to decrease further, the PCF scheme decelerates early at slightly higher rate in order to avoid aggressive deceleration. Once the vehicle successively executes the driving schemes, it would make early adjustment in its relative states and such high negative control input would never be necessary.
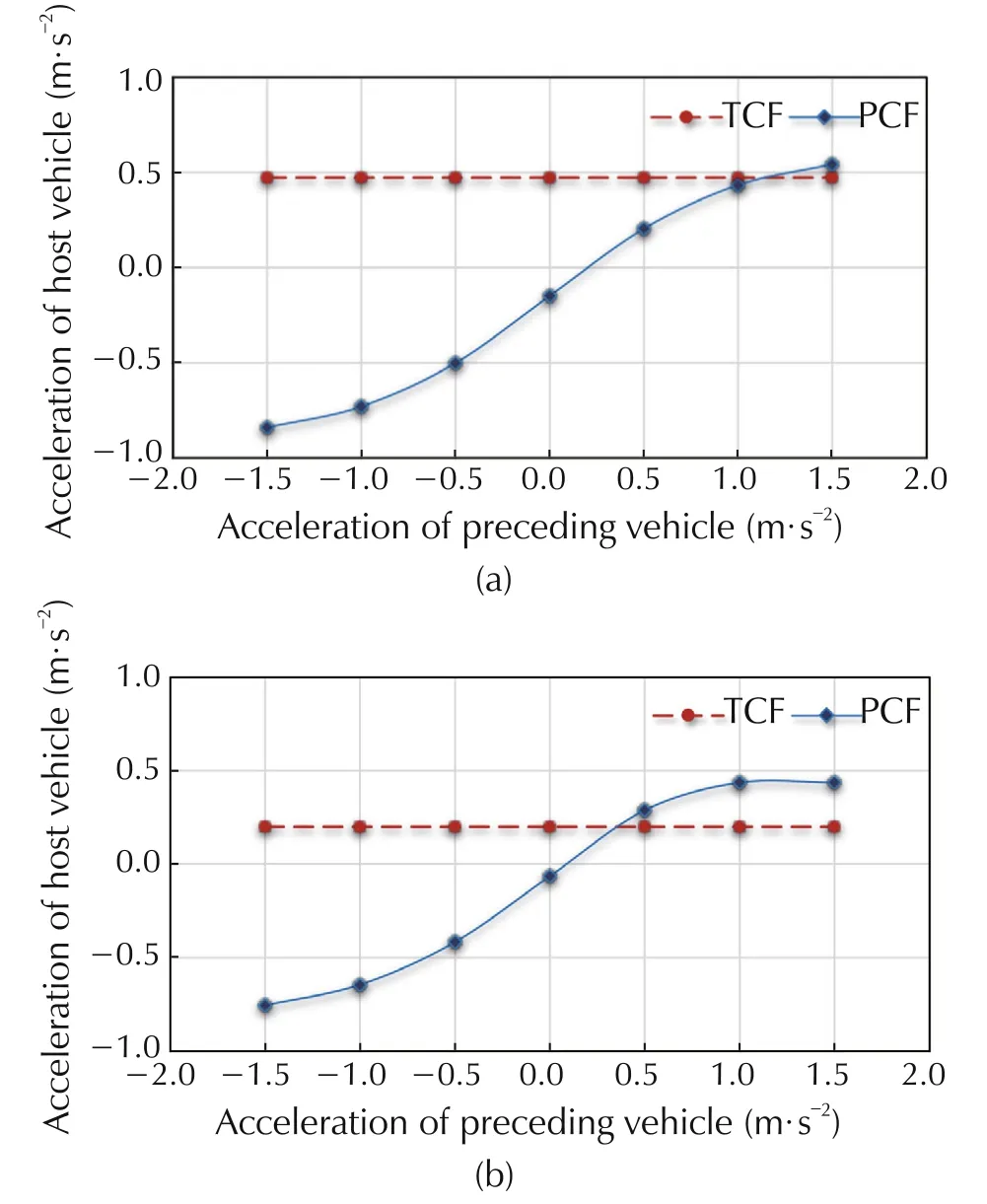
Fig.2 Comparison of acceleration profiles of the host vehicle by the TCF and PCF when the preceding vehicle accelerates at different rates.(a)Case I.(b)Case II.
Next,the traffic flow with a string of 15 vehicles is simulated for traveling about 1.3 km in 210 s on a single lane road having multiple signalized intersections.The leading vehicle is driven arbitrarily with a maximum speed of about 54 km/h assuming that there is no nearby preceding vehicle. We consider three signalized intersections that are located at 100 m,700 m,and 1300 m on the road and vehicles need to stop at the intersections when the signal is red. At first the vehicles idle at the first intersection due to the red signal that changes into green at time 25 s.The leading vehicle has to stop at the second and third intersections also. With this typical scenario,the 2nd to 15th vehicles are controlled by the TCF and the PCF in two independent simulations.For each case,the individual driving performances are observed.More specifically,trajectories,speeds,accelerations,and gaps of these vehicles are recorded for 210 s,which includes two instants of queue formations and two instances of queue departures at these intersections.
In Fig.3,traffic lights at the intersections and the trajectory of each vehicle is shown for both schemes.The TCF vehicles left the first intersection at 58 s, whereas the PCF vehicles crossed the intersection at 56 s.It implies that the PCF vehicles reduce starting lost time or delay at the intersection by about 2.5 s compared to the TCF vehicles.Consequently,such reduction in lost time increases the effective green time and hence, the capacity of the intersection.Therefore,the proposed PCF can remarkably alleviate traffic congestion or delay during peak hours. Fast speed up can also help in quick recovery of traffic bottlenecks.
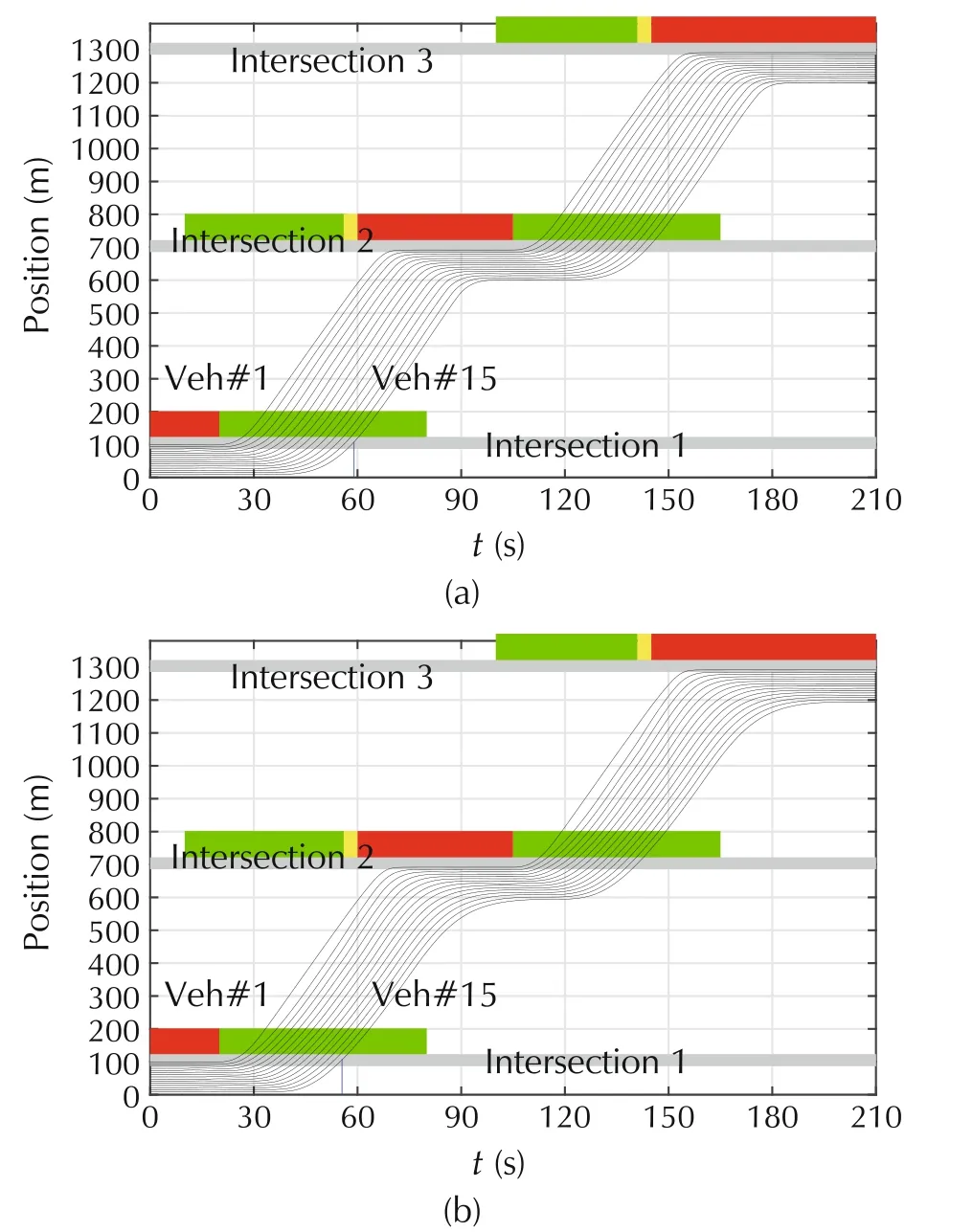
Fig. 3 Trajectories of the vehicles in traveling about 1300 m in 210 s, while stopping at the red signal in three successive intersections.The traffic lights of the respective phase at these intersections are shown above the intersection lines. (a) Traditional driving.(b)Model predictive control.
The speed profiles of the vehicles for TCF and PCF schemes are compared in Fig.4(a)and(b),respectively.In the TCF,all vehicles speed up to a maximum value of about 57 km/h and then, quickly slow down at the red signal.In the PCF,the 2nd vehicle speeds up quickly only until about 30 km/h and then,it takes a bit longer time to reach the same maximum speed (57 km/h). In contrast to the TCF,the 3rd onward vehicles show slightly lower maximum speed than the respective preceding vehicle.The vehicles quickly slow down from the peak speed to a level of about 30 km/h and after that they slowly decelerate to join the queue at the intersection.
The relative distances of the 2nd to 15th vehicles with respect to the 1st vehicle (distance from the 1st vehicle) are shown in Fig.5. The horizontal axis represents the position of the 1st vehicle. The gap between two curves expresses the inter vehicle distance.The vehicles in both schemes occupy the same length (the distance between the first and 10th vehicles)at the queue.However,they spread over the maximum length at about 60 s and 150 s. Although the 2nd vehicle in the PCF takes a bit larger gap, the maximum spread (collective/sum of gaps)of the PCF vehicle is about 40 m less than that of the TCF vehicles. It implies that the PCF vehicles flow more compactly that helps to increase the road capacity.
Finally, the acceleration of these vehicles are shown in Fig.6.In contrast to speeding up characteristics,during stopping at the red signal the PCF vehicles perform significantly low deceleration while stopping quite gradually in a very anticipative manner. Such smooth braking ensures better utilization of kinetic energy to reduce the fuel consumption and emissions.String stability,the ability of a platoon or string of vehicles to stay stable and safe while running despite influences of any disturbances, is an important aspect in evaluating the traffic flow performance.At sudden braking of the leading vehicle,the deceleration rate of the following vehicles should not be higher than the leader,otherwise the string of the vehicles will not be stable(due to propagation of braking effects that creates shock-waves or traffic jam). In this case,the PCF vehicles show much better string stability than the TCF. Note that the TCF is characterized to be string stable only at longer headway and they cannot guarantee string stability at lower headway.In this evaluation,we consider the headway near the critical value in the case of TCF.
Fuel consumption of each vehicle in the observation period for both schemes is shown in Fig.7. The fuel consumption model developed for a typical vehicle with continuously variable transmission(CVT)system is used [32]. The model approximates the fuel consumption rate according to the current speed, acceleration or deceleration. It is assumed all vehicles have identical consumption characteristics. Table 1 summarizes the distinctive features of the two schemes that are observed from the simulation[30].
4 Conclusions
In this paper,a car-following scheme in a model predictive control framework has been proposed that can be implemented in real-time for distributed control of individual vehicles.The scheme utilizes information from V2V communication in order to compute cooperative driving decision of the vehicles in dense traffic. The scheme ensures quick speed up from a queue at an intersection,while keeping the overall acceleration much lower than that of traditional driving scheme.It reduces start up loss time and consequently,enhances the intersection capacity. Furthermore, when the vehicle is approaching a queue at an intersection during red signal or sudden stop of a preceding vehicle occurs,the scheme smoothly decelerates the vehicle that helps in utilizing the kinetic energy of the vehicle to have better string stability. Therefore, the scheme not only improves the traffic flows but also helps to reduce fuel consumption.
In the future, we will implement a cooperative traffic light control along with the proposed car-following scheme and evaluate the overall traffic performance in a larger network.
杂志排行

Control Theory and Technology的其它文章
- Optimization management of hybrid energy source of fuel cell truck based on model predictive control using traffic light information
- Two-stage on-board optimization of merging velocity planning with energy management for HEVs
- A unified optimal planner for autonomous parking vehicle
- An MPC-based manoeuvre stability controller for full drive-by-wire vehicles
- Distributed active fault tolerant control design against actuator faults for multiple mobile robots
- Robust control for electric vehicle powertrains