基于T-S模糊模型的机械臂系统抗干扰跟踪控制
2019-12-04牛城波于建江
扬州大学学报(自然科学版) 2019年4期
牛城波, 于建江, 裔 扬*
(1. 扬州大学信息工程学院, 江苏 扬州 225127; 2. 盐城师范学院信息工程学院, 江苏 盐城 224007)
随着工业的发展, 许多涂装和焊接等复杂的任务都由具有高精度轨迹跟踪的机械臂完成, 使机械臂运动轨迹跟踪控制问题受到越来越多的关注[1-2].当控制系统受到外部干扰时, 人们通过H∞控制[3]、滑模控制[4-6]、自抗扰控制[7]、基于干扰观测器控制(disturbance-observer-based control, DOBC)[8]等理论设计适合的算法来处理扰动, 减少扰动对控制输出的影响.由于在干扰观测及补偿中的优异性能, DOBC算法在机器人控制领域得到了广泛关注[9-10].现有外部干扰研究多为简单的常值干扰或谐波干扰, 而T-S模糊模型可用来逼近一些复杂的非线性系统[11-12].本文拟通过T-S模糊模型对机械臂系统的不规则干扰进行逼近, 利用干扰观测器对干扰进行估计, 结合Lyapunov理论建立系统的稳定性分析框架, 并设计PID控制算法.
1 模型建立
n维自由度机械臂动力学模型可描述为[13]
(1)

2 控制器和干扰观测器
控制器设计为

(2)


(3)



(4)
由误差动态方程和Lyapunov函数可得
(5)

假设φ1(t)和φ2(t)是复合系统(3)的2个不同的动态轨迹,令
(6)

3 仿真验证
选取以下的高斯函数为T-S模糊系统的隶属函数[15]:

图1为干扰及其估计值 ,图2为系统输出.结果显示,当系统存在非线性干扰时,干扰观测器可以实现对干扰的有效估计且保证了输出的跟踪控制.
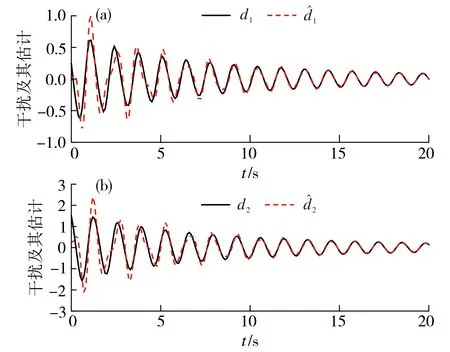
图1 干扰及其估计值Fig.1 Disturbance and its estimation value

图2 系统输出Fig.2 System output
