一种新型滑模控制算法在挠性多体卫星姿态控制中的应用
2019-12-03李信栋苟兴宇
李信栋,邹 奎,苟兴宇,2
(1.北京控制工程研究所,北京 100190; 2. 空间智能控制技术重点实验室,北京 100190)
0 引 言
随着航天技术发展,卫星任务要求不断提高,需要多体卫星本体和附件同时进行高精度姿态控制。以中继卫星为例,就要求星本体在保持姿态稳定的同时附件进行高精度的姿态机动来跟踪目标星。卫星本体与附件同时机动的复合控制技术是航天控制领域的重要发展方向,文献[1-3]已对多体卫星的建模和控制问题作了初步探讨,其中挠性天线振动与中心刚体运动耦合将严重影响卫星姿态控制精度。由于具有快速的全局收敛特性、模型降阶特性、易实现性、对外部干扰的鲁棒性以及对系统参数和建模误差的不敏感性等一系列优势[4-5],滑模控制技术得到了广泛研究与应用,取得丰硕成果。当前研究热点之一是针对传统的终端滑模控制存在控制输出趋于无穷问题,通过改进终端滑模面设计,研究非奇异Terminal滑模控制器方法[6-8];此外,高阶滑模控制方法作为新的研究方向得到迅速发展,如超扭曲滑模算法[9]、自适应参数超扭曲算法[10]和基于Lyapunov函数的超扭曲滑模算法[11]。这些算法主旨思想是将不连续的切换项隐藏在切换律的导数中,从而尝试解决有限时间收敛和减少抖振等问题,并取得了一定效果。
非奇异Terminal滑模控制技术在刚体卫星姿态控制方面的应用取得了许多成果[12-15]。文献[12-15]都在控制器设计中考虑了存在外部扰动和模型不确定性的情形,在避免奇异问题的同时,最终实现滑模面上的有限时间收敛;不同之处在于文献[12]通过构造扰动观测器对扰动进行估计,设计了基于干扰观测器的非奇异终端滑模控制器;文献[13]重点解决控制力矩饱和幅值问题;文献[14]通过自适应方法对控制器增益进行了估计,使得控制器在保持有限时间收敛的同时,具有更快的收敛速度;文献[15]在滑模控制基础上设计鲁棒控制器,从而确保姿态跟踪精度。针对模型更加复杂的挠性卫星和多体卫星姿态控制问题,众多文献同样进行了相关研究[16-19]。文献[16]将滑模控制技术与模糊理论相结合,针对柔性卫星设计姿态控制器,实现三轴姿态的渐近稳定。文献[17]设计控制器使得挠性天线精确跟踪期望运动的同时保持星体稳定,并且有效地抑制弹性附件的振动,但是没有解决滑模控制带来的抖振问题。文献[18]研究了大角度快速机动情况下刚柔耦合卫星的姿态控制问题,分别设计利用柔性信息的全状态反馈控制器和仅利用角度和角速度信息的动态输出反馈控制器,均实现了有限时间姿态控制。文献[19]针对卫星姿态机动设计了快速非奇异Terminal滑模控制器,并通过设计加权齐次扩展状态观测器(Weighted homogeneous extended state observer,WHESO)来估计所有外部干扰,解决干扰上界未知时的控制问题。
与上述方法不同,本文提出一种新型滑模控制设计方法,此方法将针对单输入单输出(SISO)系统的滑模控制技术[20]推广到多输入多输出(MIMO)非线性系统,但是考虑到奇异问题,文中将采用新的非奇异快速终端滑模面。新设计的控制器中包含一个递归学习结构,它由最近一拍的控制信号和修正项组成。而且修正项的更新采用Lyapunov函数一阶导数的估计值,此值可以连续调节闭环系统使其实现渐近收敛至最终稳定的目标。递归学习结构可以确保闭环系统轨迹在较短时间内到达滑模面,且滑模变量不会穿越滑模面产生控制律切换,因此,所设计新型滑模控制器可以完全避免传统滑模控制算法中的抖振问题。此外,控制器只需要控制输入矩阵信息而不需受控系统和未知参数的其他先验信息,这将使得算法具有较强鲁棒性。当闭环系统到达滑模面后,闭环轨迹将保持在滑模面并收敛到零。
本文研究挠性多体卫星动力学系统,考察卫星和天线仅在轨道平面内运动的特殊情形,系统模型简化地考虑俯仰姿态运动;并假设附件指向角做小角度机动。针对得到的多输入多输出系统的控制问题,结合系统模型本身的特性,将提出的新型递归学习滑模控制技术应用到挠性多体卫星系统的复合控制问题。文中所设计控制律是连续的,可以较好地抑制抖振现象,而且在确保闭环系统能够较快时间收敛的同时具有良好鲁棒性,最终实现对整个系统的稳定控制。
1 系统动力学建模及问题描述
1.1 挠性多体卫星动力学模型

下面将以1X-2Y转序为例,利用各坐标系之间的关系导出标量动力学方程。在平台姿态可以线性化、平台与附件机动角速度均不大的前提下,进一步将控制对象简化为俯仰平面问题,相应标量格式的动力学方程[1-2]为

图1 平台+天线的两刚体构型Fig.1 Two-rigid-body system with platformand appendages
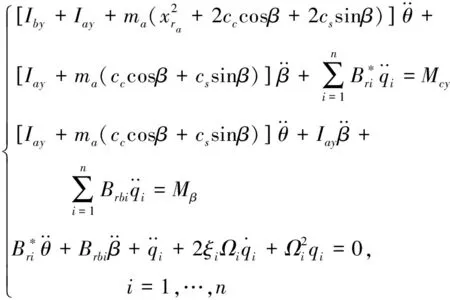
(1)
式中:
Brbi=Ia,yyψbi+macssinβφbi。
Iby和Iay分别为航天器平台与天线绕各自俯仰轴的转动惯量,θ为航天器的俯仰姿态角,β为天线绕Y轴的转动角,xra,cc,cs为系统几何参数所决定的常系数,ma为天线质量,qi为天线模态坐标,Bri为天线支撑臂的第i阶转动耦合系数,φbi和ψbi分别为第i阶挠性位移变形和转角变形振型函数在天线支撑臂末端的值;ξi和Ωi分别为天线支撑臂第i阶阻尼系数和固有频率,Mcy为绕航天器Y轴的俯仰姿态控制力矩,Mβ为β转角控制力矩。
若考虑天线驱动组件(Gimbal driver assembly,GDA)作为天线驱动执行机构,可得天线驱动力矩Mβ为[2]
(2)
其中,k为等效弹簧刚度,Dp为等效弹簧阻尼系数,βf为天线指令输入转角。此外,考虑系统存在非线性输入扰动,同时为后续控制器设计方便,将式(1)所示系统模型重新整理为如下形式

(4)



1.2 控制器目标

(5)
其中,Λ=diag(Λ1,Λ2)和Δ=diag(Δ1,Δ2)是正定常数矩阵,γ和κ是常数,且满足γ>κ,2>κ>1,sigm(x):=|x|msgn(x),sgn(·)为符号函数。
那么,挠性多体卫星姿态控制问题即为针对满足假设1的系统(4),设计控制器u(t)使得
(6)
注1.明显地,如果能够设计控制器u(t)使得如式(5)所示的滑模变量在较短时间内收敛到零,那么系统输出e(t)就能够在滑模面S(t)=0上以指数形式收敛到零。
2 新型滑模控制器设计
下面对滑模变量S(t)求关于时间t的导数,并将动力学方程(4)代入,可得
B(u+d))=F(t)+B0u(t)
(7)
其中,
(8)

设计新型滑模控制器如下:
u(t)=u(t-τ)-Δu(t)
(9)
其中修正项部分Δu(t)为

(10)

ST(t)Γ(F(t)+B0u(t))=
ST(t)Γ(S(t)-S(t)+F(t)+B0u(t))=
ST(t)ΓS(t)+ST(t)ΓF0(t)+ST(t)ΓB0u(t)
(11)
其中,Γ是对称正定矩阵,F0(t)=F(t)-S(t)。

(12)
可知,若选择足够小的时间常数τ,那么存在正数M>>1和较小的正常数λ1,当Φ(φ(t),u(t-τ))和Φ(φ(t-τ),u(t-τ))都不为零时,使下面不等式成立

(13)
定义估计误差

(14)
选择满足如下不等式且都为正数的控制器参数η1,λ和λ1
(15)
λ>η1λ1
(16)
注2.由于时间常数τ可以选足够小,因此,可以做如下合理假设:


注3.结合式(15),可知当Φ(φ(t),u(t-τ))和Φ(φ(t-τ),u(t-τ))都不为零时,式(13)可变为

(17)
不等式(17)可被称为Lipschitz-like条件,此条件指出当时间常数τ选的足够小时,Lyapunov函数梯度的当前值与其上一帧值的差值是非常小的。Lipschitz-like条件使得设计的滑模控制器不需要未知系统参数和不确定动力学的上下界信息,此外,还能确保闭环系统在较短时间内收敛到零。
3 稳定性分析
定理1.考查状态方程如式(3)所示的一类MIMO非线性系统,当输入如式(9)、式(10)所示控制器u(t)时,系统状态误差e(t)渐近收敛于零。
证.
对前面已定义Lyapunov候选函数V(t)求关于时间t的导数,并将式(9)、式(10)所示控制输入代入方程,有
ST(t)ΓS(t)+ST(t)ΓF0(t)+ST(t)ΓB0u(t-τ)-
(18)

ST(t)ΓB0u(t-τ))+(ST(t-τ)ΓS(t-τ)+ST(t-τ)ΓF0(t-τ)+ST(t)ΓB0u(t-τ))=
Φ(φ(t-τ),u(t-τ))+Φ(φ(t-τ),u(t-τ))=
(19)
根据式(17)所示Lipschitz-like条件可知

(20)

根据上面分析可得
(21)
(22)
而注意到

(23)
将不等式(23)应用到不等式(22),有

(24)

(25)

当
(26)
此时,式(19)可重新整理为
(27)
(28)
那么,在t=t1+τ时刻,式(19)可重写为:
(29)

(30)
注意到
(31)
(32)
因此,根据不等式(31)、(32),式(30)可变为
(33)
即
(34)

基于上述式(18)~(34)的系统稳定性分析,可以得出结论,文中设计的滑模控制器(9)能够确保闭环轨迹可在有限时间内到达滑模面S(t)=0,且系统状态误差e(t)在滑模面上渐近收敛于零。
4 仿真结果与分析
针对挠性多体卫星本体俯仰轴姿态运动和天线指向角运动同时跟踪时的多输入多输出控制系统,利用文中提出的基于Lyapunov函数的改进型滑模控制器(改进型L-SMC)进行仿真分析,以校验本文所设计控制器的有效性,并分别与改进前的基于Lyapunov函数滑模控制器(L-SMC)和文献[18]中设计的非奇异快速终端滑模状态反馈控制器(NFTSMC)进行对比。
控制对象模型参数取Iay=0.438 kg·m2,Iby=3453 kg·m2,xra=-0.0056 m,cc=-1.94 m,cs=-0.22 m,ma=8 kg,天线驱动机构刚度k=9.5 Nm/rad,等效阻尼系数Dp=0.95。考虑天线的前两阶模态,其两阶模态频率为[Ω1,Ω2]=[0.913,3.86],相应阻尼系数为[ξ1,ξ2]=[0.018,0.02],天线对卫星姿态转动耦合系数Br1=0.5,Br2=0.65,天线支撑臂在安装点的振型系数φb1=-0.1,φb2=-0.065,ψb1=-0.08,ψb2=0.125。
基于式(9)、式(10)所设计的新型滑模控制器,借助MATLAB仿真工具,采用Runge-Kutta方法实现闭环非线性微分方程的求解。选择仿真参数Λ=diag(8.07,2.32),Δ=diag(37.8, 2.24),γ=1.1,κ=1.0002,Γ=diag(1.2,1.2),时间常数τ=0.01 s,η1=2.28×10-3,β1=6.98×10-3,η2=8.13×10-4,满足不等式(16)的标量λ被设置为λ=3η1λ1=4.7743×10-5,采样周期ΔT=0.01 s。
针对文献[18]所用方法的仿真结果如图2~5所示。

图2 俯仰角变化曲线Fig.2 Time responses of pitch angle

图3 天线转角变化曲线Fig.3 Time responses of antenna angle
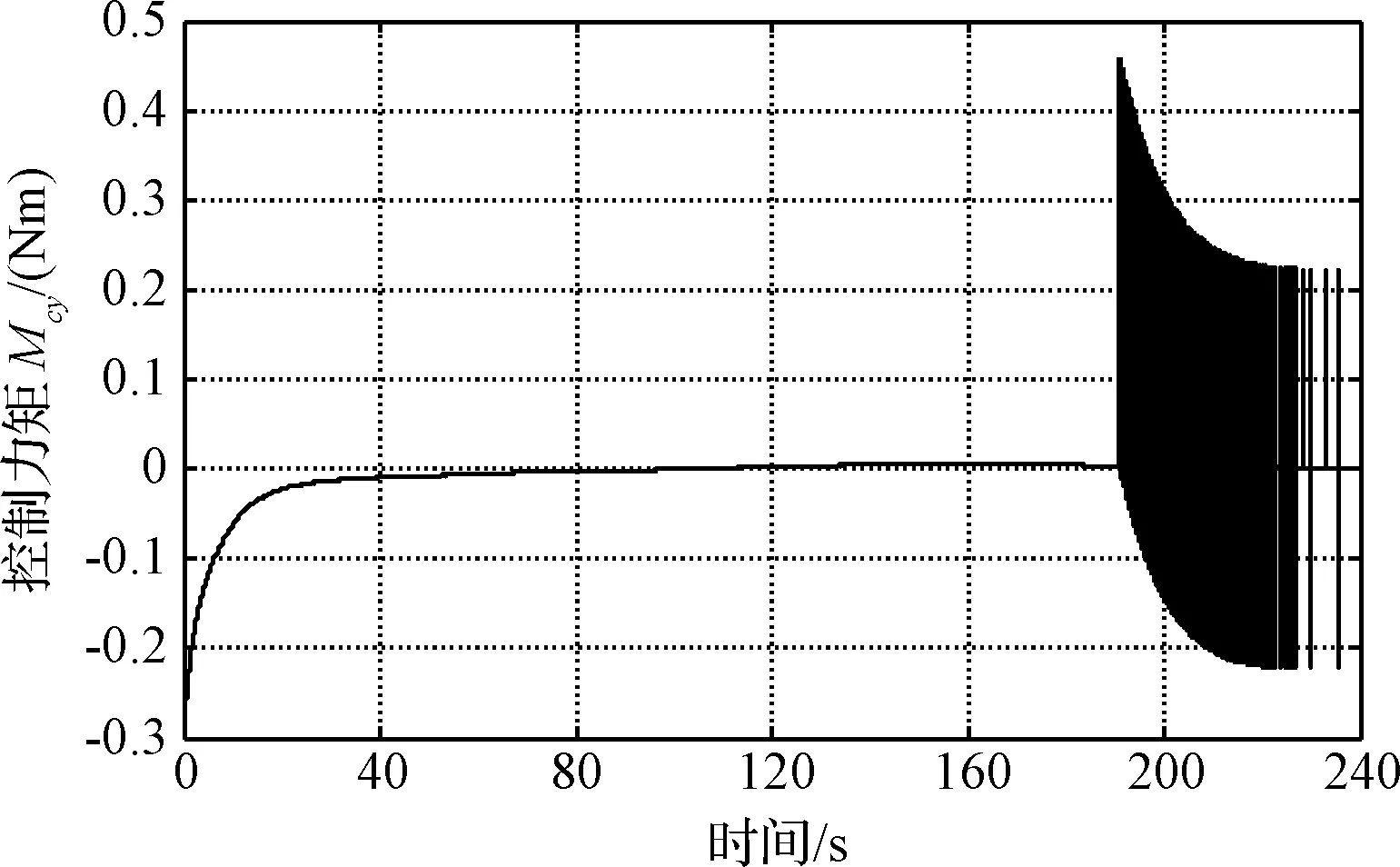
图4 控制输入Mcy变化曲线Fig.4 Time responses of control input Mcy

图5 控制输入βf变化曲线Fig.5 Time responses of control input βf
改进前和改进后的L-SMC控制器仿真结果如图6~9所示。

图8 控制输入Mcy变化曲线Fig.8 Time responses of control input Mcy
分析图2~图9的仿真结果,可知文献[18]的俯仰角收敛速度最慢,这是由于文献[18]提供的俯仰轴控制力矩Mcy(见图4)较小,而俯仰轴转动惯量较大,导致其俯仰角收敛相对较慢。对于天线转角,图3的收敛速度最快,这是因为文献[18]提供的天线控制输入βf(见图5)较大。分析图6可知,改进后的L-SMC控制器相比改进前能够极大地减小俯仰角的超调量,并且明显提高收敛速度。
对比图4和图8所示三种控制器分别产生的俯仰轴控制力矩输入Mcy,可知只有文献[18]所设计控制输入有明显的抖振现象(见图4),而改进后的L-SMC控制器相比改进前在保证控制效果的基础上控制输入幅值有显著减小。对比图5和图9所示三种控制器分别产生的天线转角控制输入βf,同样地,可看出只有文献[18]有明显的抖振现象(见图5),而改进后的L-SMC控制器相比改进前控制输入幅值也有明显减小。

图9 控制输入βf变化曲线Fig.9 Time responses of control input βf
综合三种不同控制器的仿真分析结果,可以看出本文所提出的基于Lyapunov函数的改进型滑模控制器(改进型L-SMC)不仅能够完全消除传统滑模控制常见的抖振现象,而且相比改进前算法,可以在减小控制输入幅值的基础上确保较好的控制效果。
5 结 论
本文设计一种新型基于Lyapunov函数终端滑模控制器应用于挠性多体卫星复合控制,所设计控制律能够确保闭环轨迹在较短时间到达滑模面并在滑模面上收敛到零;而且该控制律是连续变化的,完全消除了滑模控制技术特有的抖振现象,这在仿真结果中得到校验。此外,该控制器仅需要控制输入矩阵B(t)的信息,而无需知道其它未知参数和不确定系统的上下界信息,同时在控制器设计过程中考虑了外部干扰,使其具有良好的鲁棒性,而仿真结果亦显示出新型滑模控制器具有较好控制效果。综上所述,所设计控制器具有良好的工程实用价值。下一步的工作可以尝试解决控制输入矩阵B(t)信息未知时的控制器设计,使得该控制方法具备更广阔的应用前景。
