模块化轮腿式月面机器人方案设计
2019-10-31韩亮亮张元勋
岳 念,李 聪,韩亮亮,张元勋
(1.重庆大学教育部深空探测联合研究中心,重庆400044;2.重庆大学机械工程学院,重庆400044;3.上海宇航系统工程研究所,上海201109;4.重庆大学航空航天学院,重庆400044;5.中国航天科技集团有限公司空间结构与机构技术实验室,上海201108)
1 引言
轮腿式机器人综合了轮式机器人的高机动性以及足式机器人的高灵活性的特点,得到了国内外大量的研究与设计[1]。但面对非结构化的月面环境,轮腿式机器人因其固定的结构及尺寸,机动范围以及任务能力均受限[2]。因此需要研究可重构机器人。
目前,针对机器人可重构性问题的研究,主要集中在模块设计、构型设计、运动模型、重构方法、控制系统几个方面[3],并且研究对象大多为模块化机械臂,对于模块化的移动机器人研究较少[4-5]。
本文将模块化设计引入月面移动机器人,对典型的月面移动机器人——轮腿式机器人进行模块化设计,以使该机器人在具备传统轮腿式机器人性能的基础上,具有较高的可重构性。
2 总体方案
参考生物界昆虫的多种构型以及对应的运动方式,考虑模块化机器人的3种类型——直线型、环形、晶格型[6],对轮腿式机器人车身模块以及轮腿模块进行设计,得到总体方案如图1所示,该方案可组成的多种不同构型如图2所示。
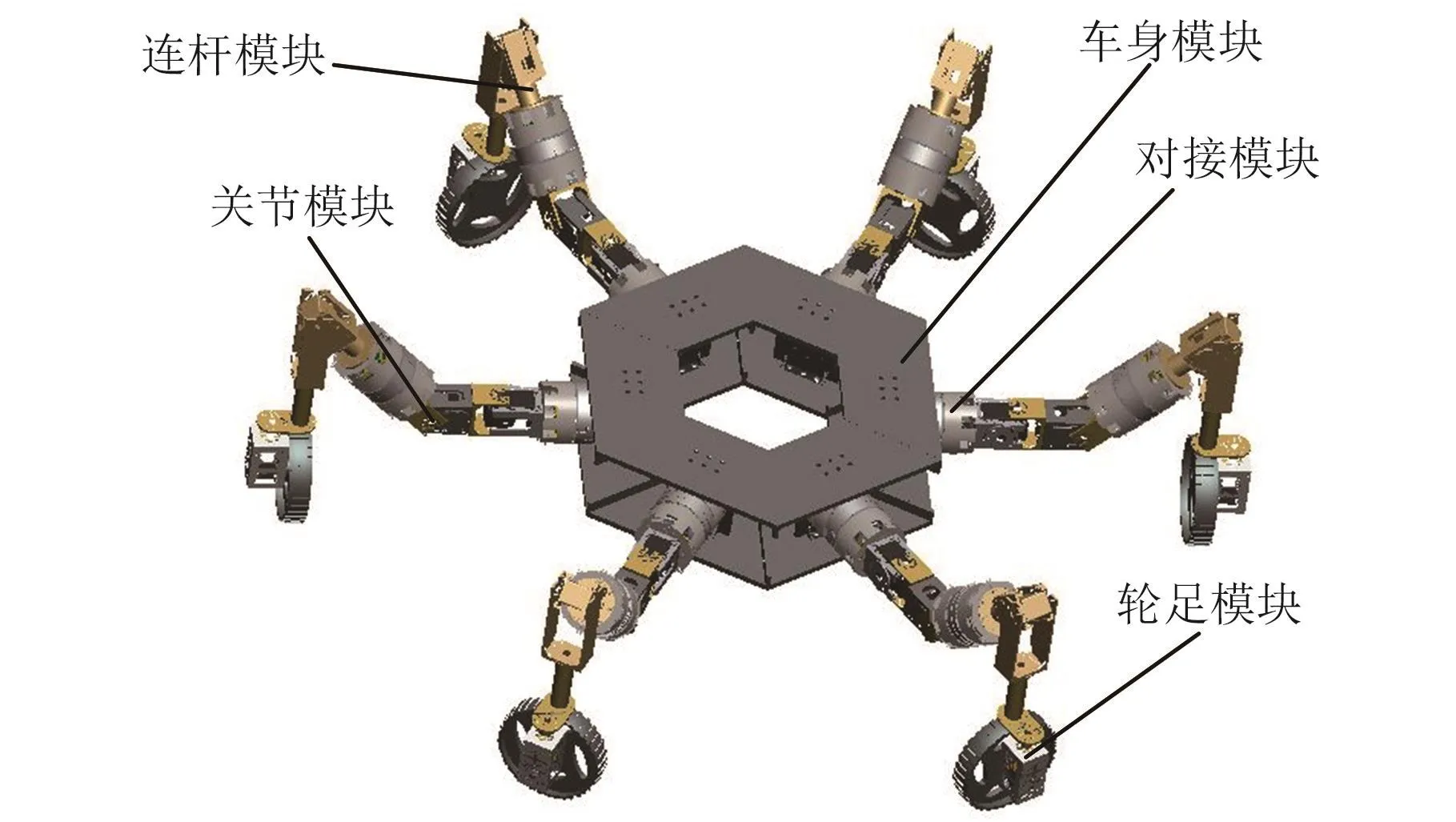
图1 模块化轮腿式月面机器人方案Fig.1 Scheme of modular wheel-legged lunar robot
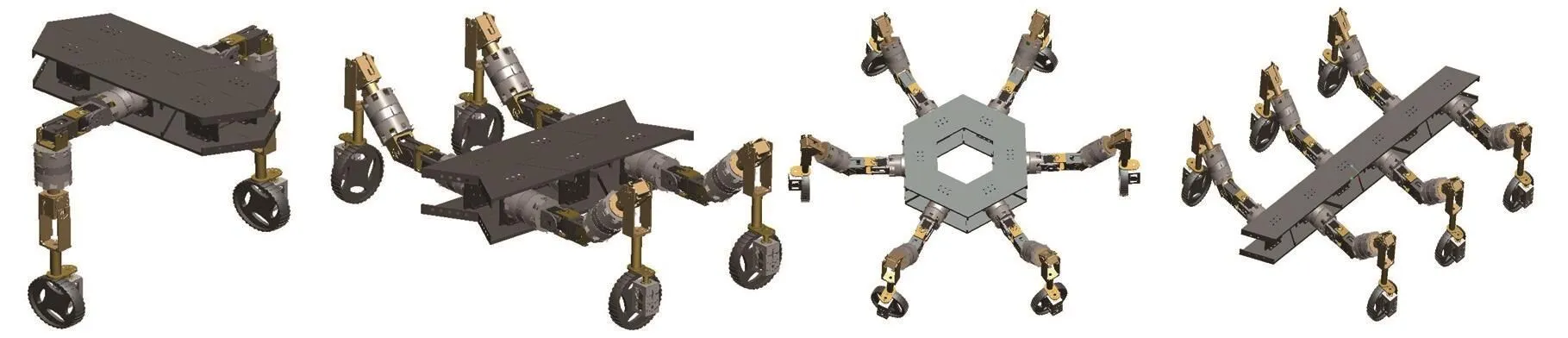
图2 模块化轮腿式月面机器人不同构型Fig.2 Schematic diagram of modular wheel-legged lunar robot configuration
该机器人由车身模块、关节模块、轮足模块和其他模块组成。其中,车身模块为中心模块;关节模块为机器人移动系统的核心模块,机器人的运动以及自由度的调整由关节模块决定,通过增加或减少关节模块,可改变模块化轮腿式机器人的构型及自由度;轮足模块作为机器人末端行走机构,可通过改变模块或锁紧车轮更换机器人行走方式;其他模块为上述模块提供能源保障、通信及及其他功能。车身模块与关节模块之间、不同的关节模块之间均采用无极性对接进行连接。
3 构型设计
3.1 模块化
模块化设计的目的在于实现轮腿式月面机器人的可重构性[7],工程需要从中选择满足要求的模块组合。
基于图论可得到不同构型轮腿式月面机器人对应的构型图以及构型矩阵,通过构型图可知所搭建的机器人基本构型,通过构型矩阵,可知所需要的模块种类、数量、连接关系[8]。同理,已知构型图及构型矩阵,就可以得到模块的种类、数量以及连接关系,从而解决工程中快速搭建不同机器人构型的问题。
对模块化轮腿式月面机器人进行构型设计,首先建立模块化可重构六支链轮腿式月面机器人构型树,在构型树中,总体构型作为树的出发点。车身模块组成车身构型,关节模块、轮足模块、其他模块组成轮腿构型,这两大构型作为总体构型的两大分支。对车身构型及轮腿构型进行细化,分别建立车身构型图及关联矩阵,将车身构型得邻接矩阵设为Mv(G),轮腿构型的邻接矩阵为Mh(G)。根据邻接矩阵的定义,得出模块化六支链轮腿式月面机器人总体构型的邻接矩阵M(G)为式(1):

其中Mvh(G)为组成车身的元素(车身模块)与组成轮腿的元素(关节模块及连杆、轮足模块)之间的邻接矩阵。以正六边形六支链轮腿式月面机器人作为对象进行构型分析,正六边形六支链轮腿式月面机器人总体构型之一如图3所示。
图3(b)中的H1-H6表示机器人单腿图,对应图3(d),H1-H6为同构。根据模块的设计及构型示意图,列出机器人的节点对照表,如表1所示。
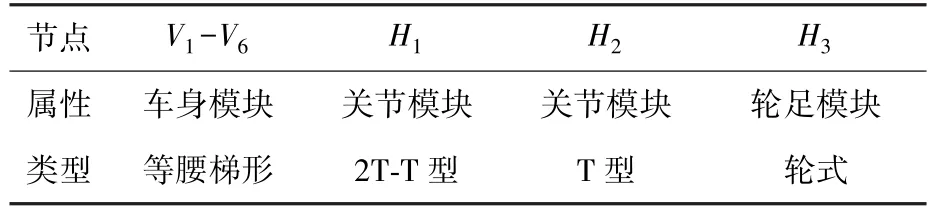
表1 节点对照表Table 1 Table of node contrast

图3 正六边形六轮腿月面机器人图Fig.3 Diagram of regular hexagonal six branched wheel-legged lunar robot
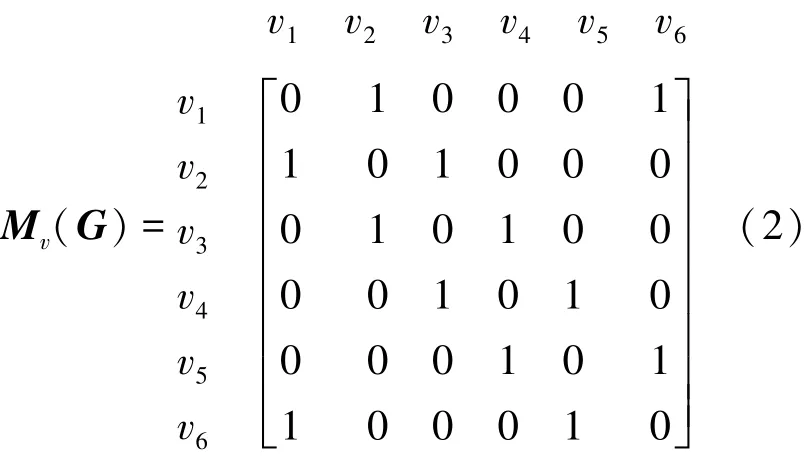
采用图论中图的邻接矩阵的算法求得车身构型的邻接矩阵Mv(G)为式(2):
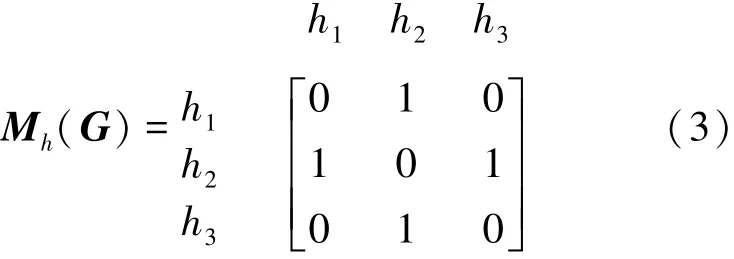
轮腿图的邻接矩阵Mh(G)为式(3):
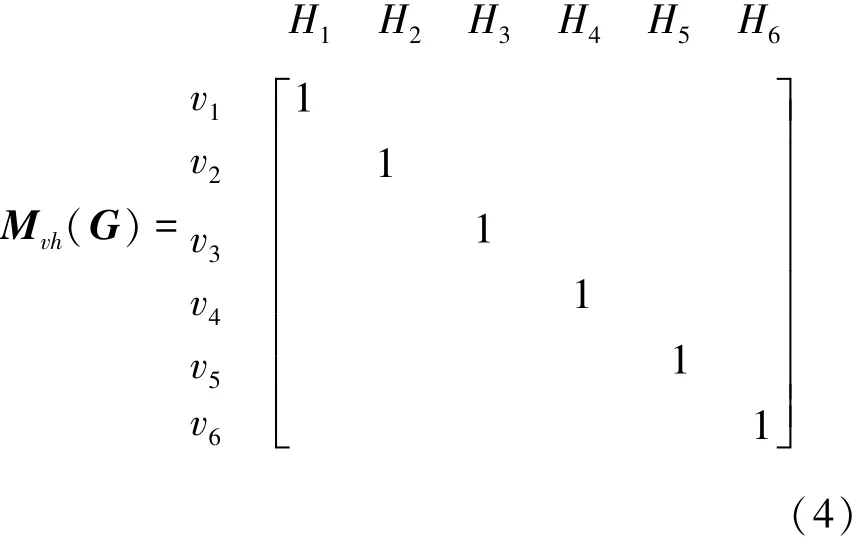
车身模块与轮腿模块之间的邻接矩阵Mvh(G)为式(4):
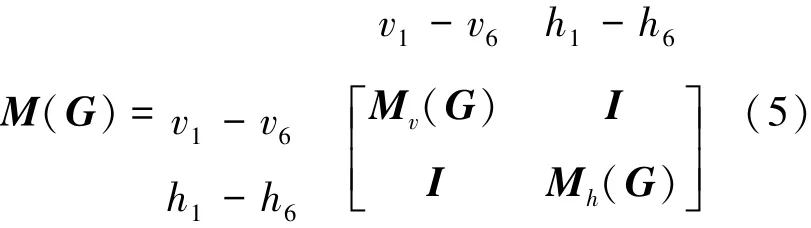
从而算得图3所示构型的模块化轮腿式月面机器人的构型矩阵M(G)为式(5):
通过上述方法,可算出不同构型的机器人的构型矩阵,结合构型简图以及节点对照表,即可快速得到模块的种类、数量、连接方式。
3.2 运动学分析
以典型的正六边形构型的模块化轮腿式月面机器人(环形)以及直线形构型的模块化轮腿式月面机器人为例,针对最基础的足式直线运动,以车身运动中的平稳度为评价标准,从步态种类、步态特性、运动特性3个方面进行对比分析,可得环形与直线型模块化轮腿式月面机器人直线运动分别如图4、5所示。

图4 模块化正六边形轮腿式月面机器人直线运动简图图Fig.4 Linear motion diagram of modular hexagonal wheel-legged lunar robot
月面环境复杂,所设计的轮腿式机器人具备容错功能,所以腿数一般均多于4,综合考虑运动控制的难易程度以及机器人运动的稳定性,六足轮腿式机器人是较优的选择[9-10]。所以选择六足式的直线型以及正六边形作为典型进行对比分析。
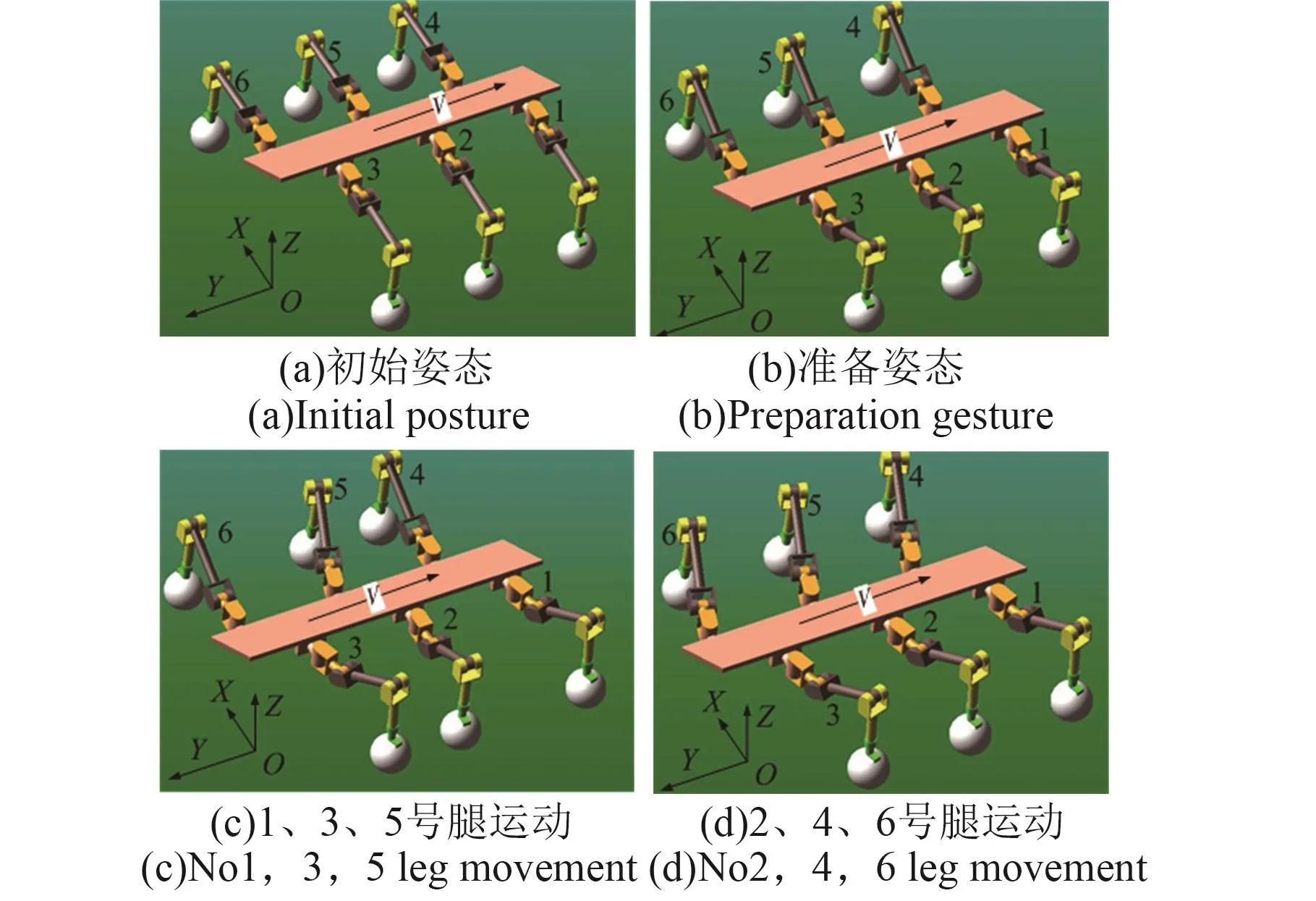
图5 直线形构型轮腿式月面机器人直线运动简图Fig.5 Linear motion diagram of wheel-legged lunar robot with linear configuration
所对比的2种构型,其组成元素完全形同,并且轮腿构型以及参数也相同。两者均采用摆腿中的“3+3”步态,进行固定周期的直线运动分析。正六边形构型的机器人“3+3”步态直线运动规划图如图6所示。
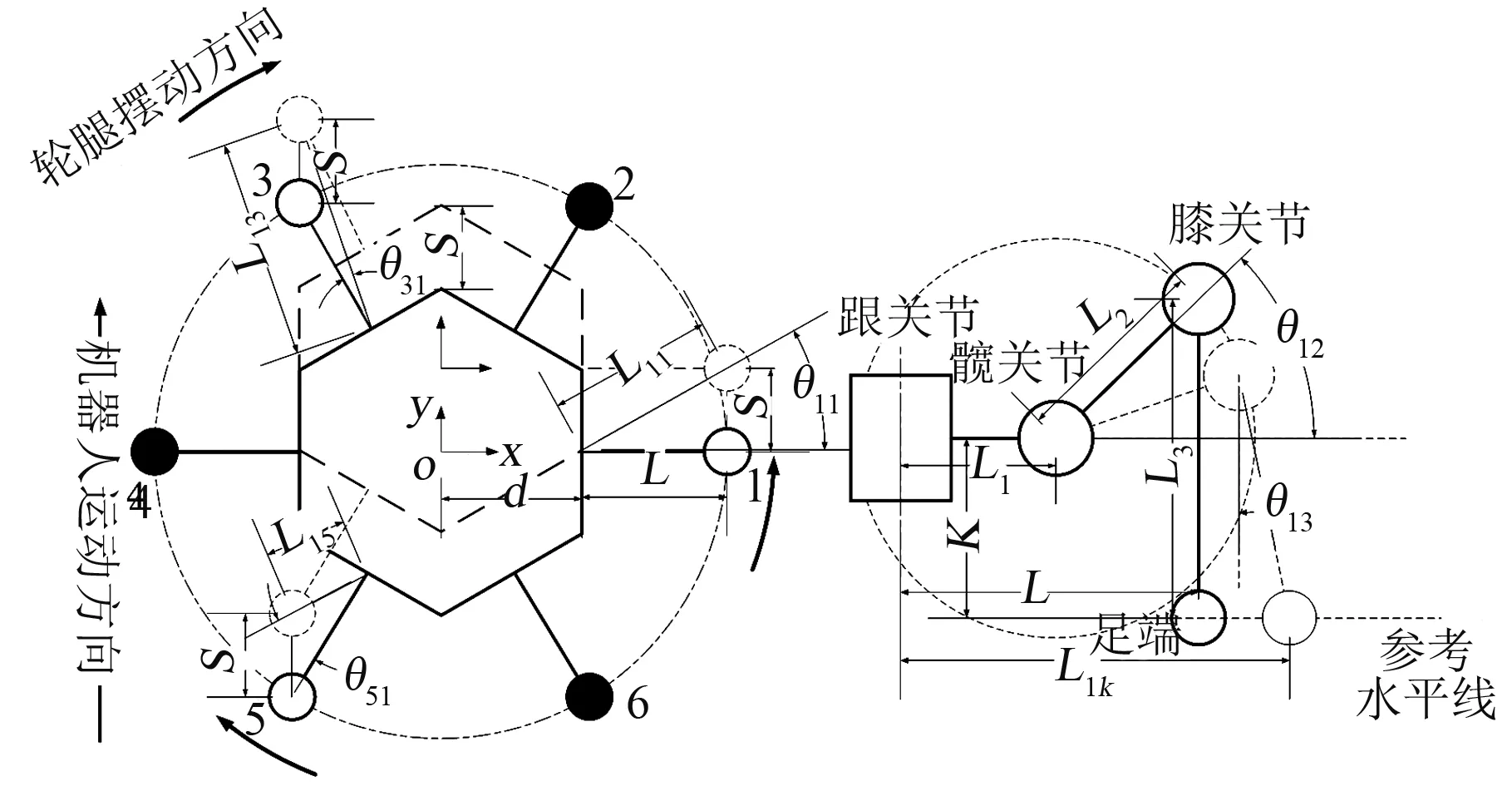
图6 正六边形式轮腿式机器人直线步态规划示意图Fig.6 Schmetic diagram of linear gait planning for regular hexagonal wheel-legged robot
图6 中,d是车身模块组合后几何中心距轮腿根关节轴线的距离;L为根关节中心到足端中心距离在水平面上的投影;L1k是第k条腿摆动后根关节中心到足端中心距离在水平面上的投影;K是根关节中心与足端中心的垂直距离(机器人车体支撑高度);S是直线步态半步长;θk1是初始状态第k条腿根关节摆动角;θk2是初始状态第k条腿膝关节摆动角;θ′k1是摆动状态第k条腿根关节摆动角;θ′k2是摆动状态第k条腿膝关节摆动角。分析可得摆动相的1、3、5号腿的运动学限制条件为式(6)~(8):

4 仿真验证
设置仿真参数如表2。
表2 仿真参数Table 2 Simulation parameters
根据公式(6)~(8)计算得到1、3、5号腿的运动参数如表3~5所示。

表3 1号腿运动参数Table 3 Kinematic parameters of leg 1

表4 3号腿运动参数Table 4 Kinematic parameters of leg 3

表5 5号腿运动参数Table 5 Kinematic parameters of leg 5
直线型构型的机器人“3+3”步态直线运动比正六边形构型的机器人直线步态简单。根据规划以及所计算的到的三条腿的运动参数,可以看出进行直线运动时,机器人的摆动相三条腿的运动各不相同。直线型构型由于腿分布在直线运动方向上对称,摆动相三条腿的摆动运动完全相同,与正六边形构型的机器人1号腿运动一致。通过ADAMS对正六边形构型的轮腿式月面机器人进行仿真分析,得到摆动相三条腿各个关节运动的变化曲线如图7~9所示。
正六边形式的机器人足端运动在y方向的位移变化曲线如图10、车身运动轨迹如图11所示。
直线形构型的轮腿式月面机器人进行摆腿直线运动时,每条腿各个关节的运动规律如图12所示。其足端运动曲线如图13,车身运动曲线如图14。
可见在足式直线运动中,直线型构型的机器人的运动方式以及车身在运动中的稳定性优于正六边形构型。对比结果见表6。

图7 1号腿3个关节的运动曲线图Fig.7 Motion curves of three joints of leg No.1
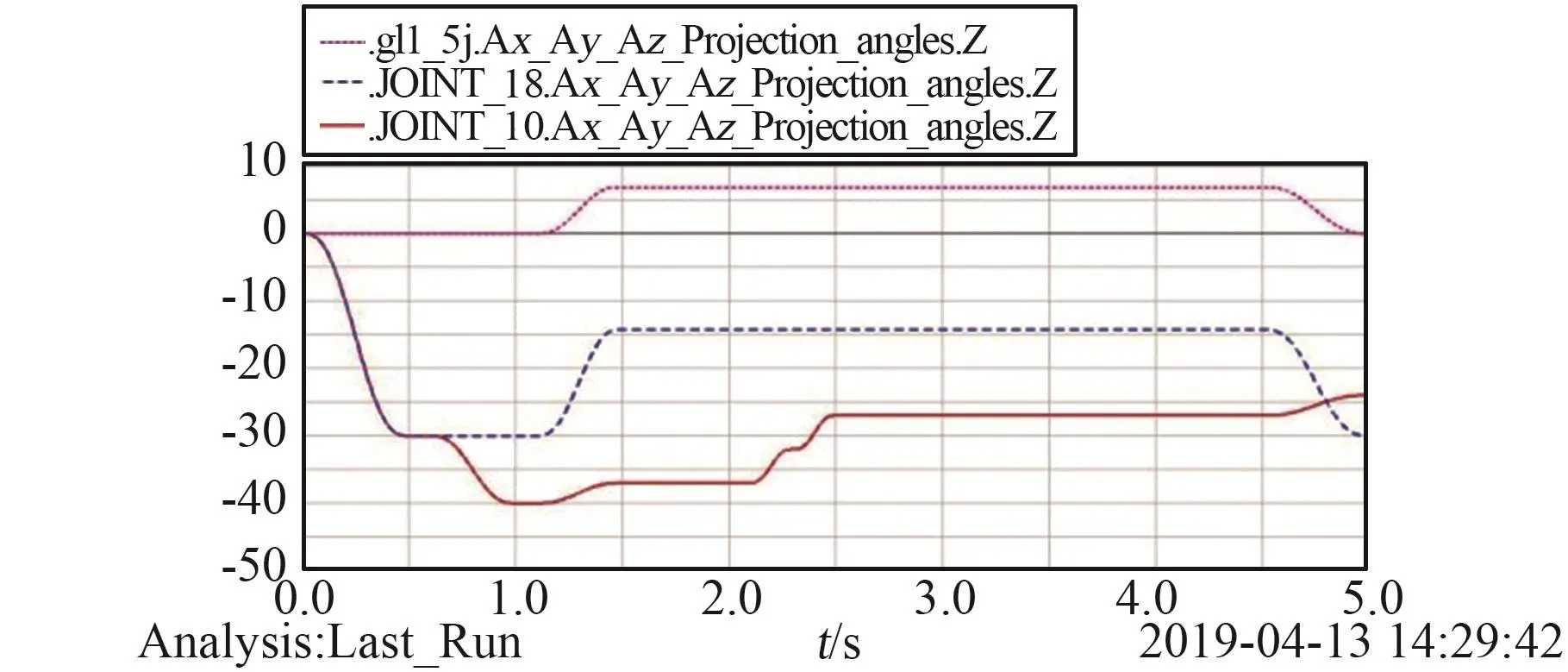
图8 3号腿3个关节的运动曲线图Fig.8 Motion curves of three joints of leg No.3

图9 5号腿3个关节的运动曲线图Fig.9 Motion curve of three joints of leg No.5
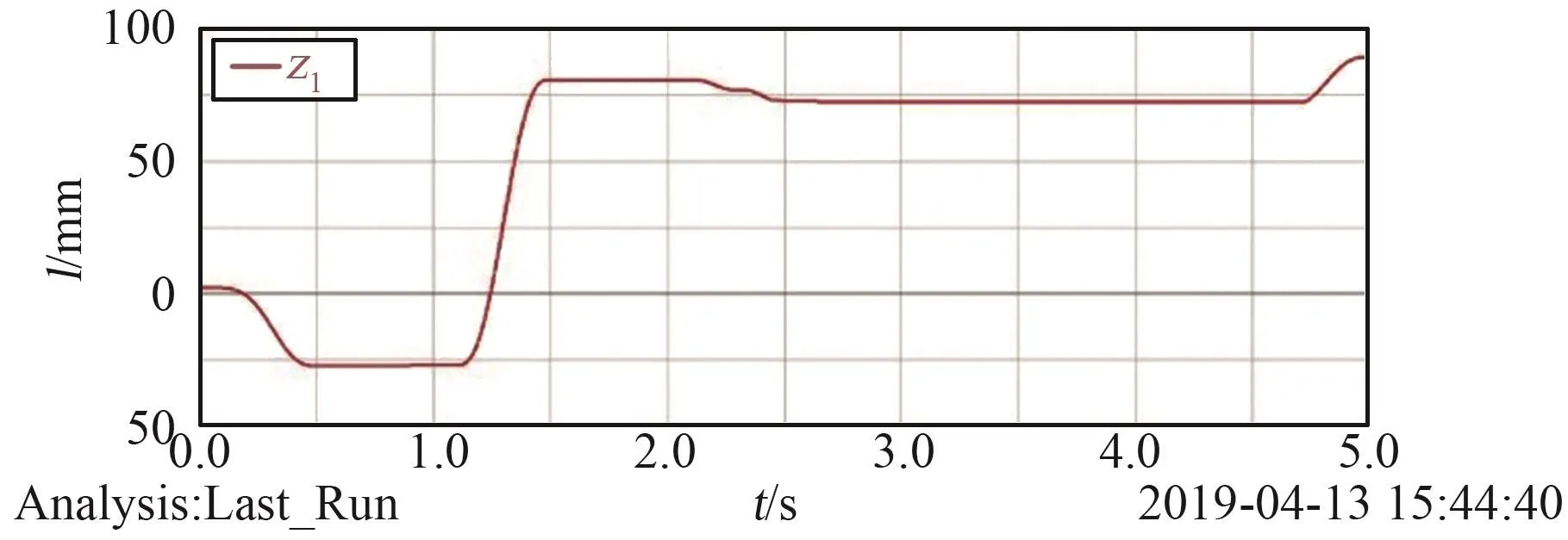
图10 正六边形机器人足端y方向运动位移曲线图Fig.10 Displacement curve of feet in y-direction for hexagonal robot

图11 正六边形机器人车身运动位移变化曲线Fig.11 Displacement curve of the hexagonal robot
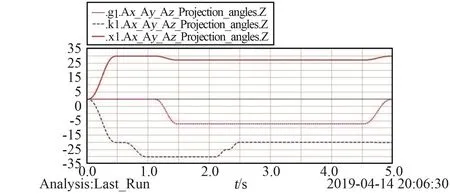
图12 直线形机器人单腿3根关节运动规律曲线Fig.12 Motion curves of three joints of one leg in a linear robot
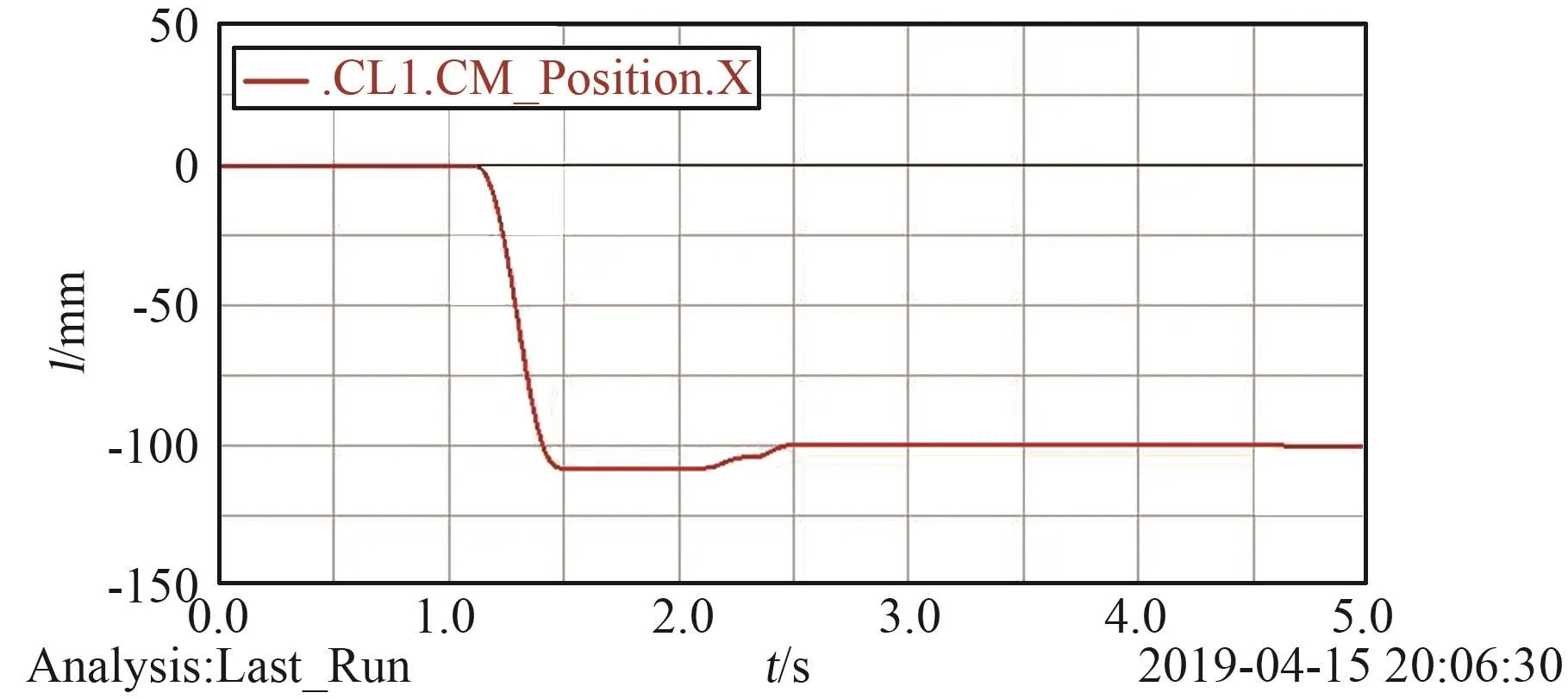
图13 直线形六轮腿机器人足端y方向运动位移曲线图Fig.13 Displacement curve of feet in y-direction for the hexapod wheel-legged robot
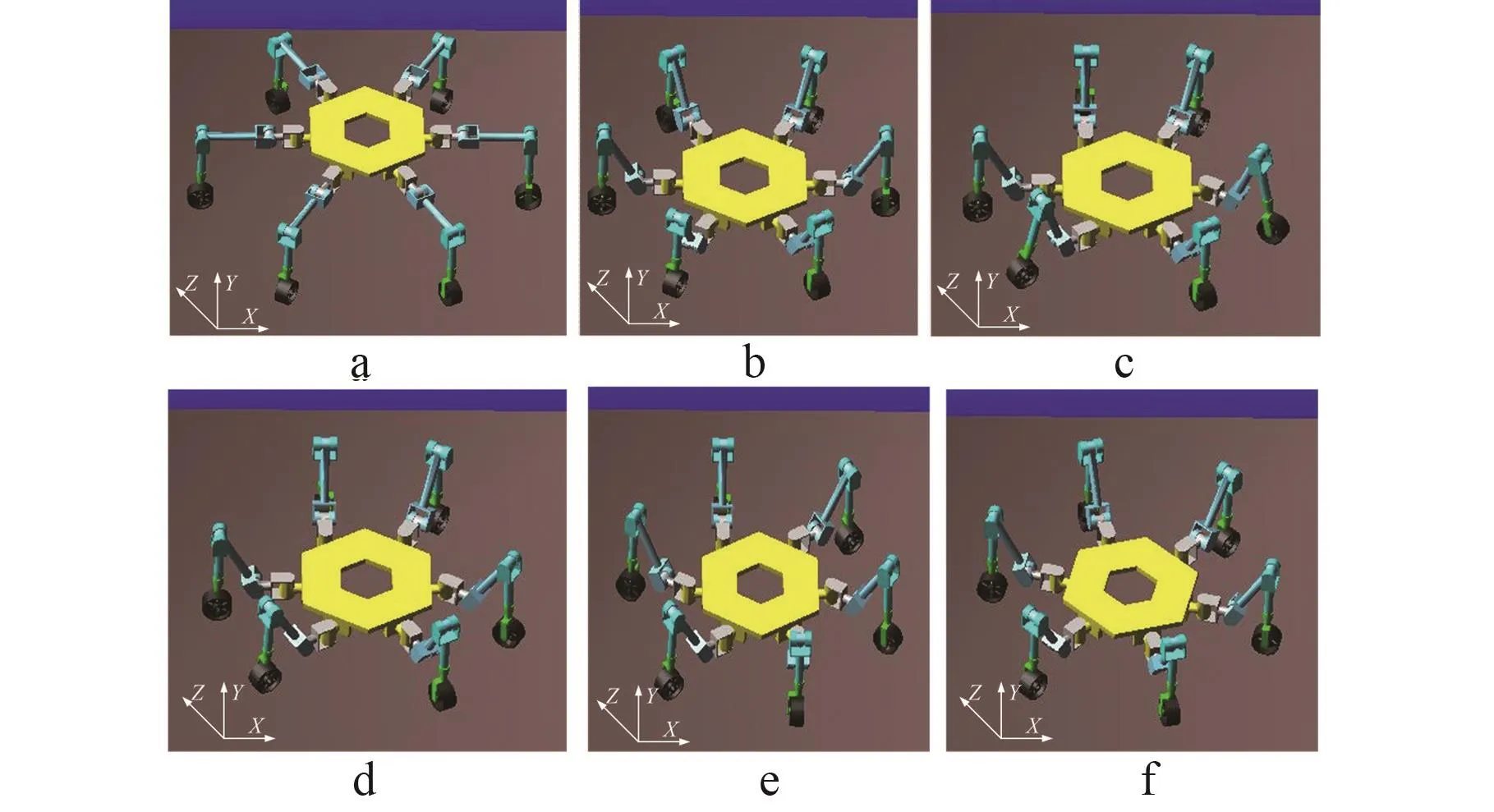
图14 直线形六足轮腿机器人车身运动位移变化曲线Fig.14 Displacement curves of linear hexapod wheellegged robot
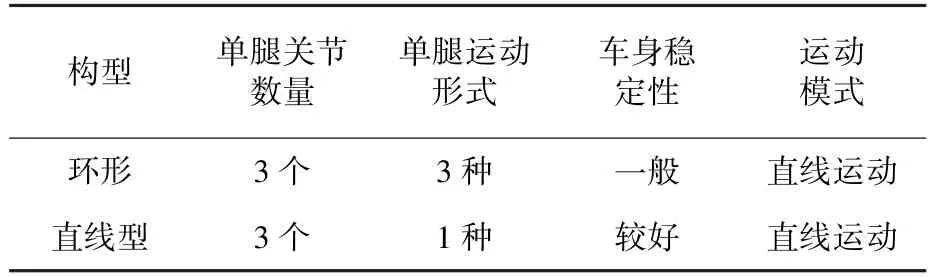
表6 对比结果Table 6 Results of contrast
5 结论
1)模块化设计增加了轮腿式月面机器人的可重构性,使得轮腿式机器人具备多种不同的构型。
2)基于图论的基本方法,可以对模块化轮腿式月面机器人进行构型分析。通过建立构型图,分析模块之间的连接关系,最终得到了机器人构型图及构型矩阵。此方法可为模块化轮腿式月面机器人的构型分析提供参考,为快速搭建标准化构型提供理论基础。
3)在相同的步态以及运动形式下,采用同种模块组合成的直线型轮腿式月面机器人较正六边形轮腿式月面机器人的直线运动更加平稳,仿真结果可为轮腿式月面机器人的构型选择提供参考。
