面向载人月球探测任务的月面机器人系统初探
2019-10-31张崇峰韩亮亮
张崇峰,韩亮亮
(1.上海航天技术研究院,上海201109;2.上海宇航系统工程研究所,上海201109;3.中国航天科技集团有限公司空间结构与机构技术实验室,上海201109)
1 引言
月球是离地球最近的地外天体,登月是实现人类对太空拓展的第一步。自1966年至今,人类成功完成了21次月球软着陆任务,苏联的月球号(Luna)系列,美国的勘测者号(Surveyor)系列、阿波罗号(Apollo)系列,中国的CE-3号、CE-4号相继登陆月球,开展了移动巡视、样品采集、科学试验等月面活动,取得了宝贵的科学及工程成果。着陆月球、在月表开展直接的探测作业是认识月球、利用月球最直接有效的手段。
开展载人月球探测是发展并掌握地外天体载人探测能力的有利途径,载人月球探测、建立长期月球科研基地也是世界各航天强国的探测热点目标。在我国载人航天工程和月球探测工程之后,我国基本具备了实施以月球为代表的载人深空探测的技术条件[1]。
迄今,有人参与的月面活动只有阿波罗登月的6次活动,主要采用了“航天员+航天服+登月舱”的配置方案,在后期任务中加入了载人月球车。阿波罗计划中没有配置月面机器人,随着机器人技术的进步,在各国的探月规划中[2-3],月面机器人成为月面活动设施中重要的组成部分。
使用云天化镁立硼、硝铵磷复合肥的示范田与对照田比较,前期长势不是特别明显,根系较对照田的更发达,中后期长势不脱肥,抗病能力强,特别是农户说往年出现烂根,而今年没有烂根。
针对有人参与的月面活动,本文介绍已开展或规划的月面活动,提出我国开展月面活动的设想,论证月面活动不同发展阶段对机器人系统的任务及能力需求,并提出各阶段机器人配置设想,分析月面机器人系统发展需解决的关键问题。
2 载人月球探测任务对月面机器人系统的需求
在未来有人参与的月面活动中,月面机器人将是月面驻留与活动系统的重要组成部分之一,其具有工作时间长、任务丰富、安全性高、极端环境适应能力强的特点,能够辅助或协同航天员开展巡视探测、采样分析、物资搬运、科学实验、维修维护以及设施建造等月面任务。
在有人参与的月面活动中,配置机器人系统的优势是明显的,载人月球探测任务对月面机器人系统的任务及功能需求主要体现在4个方面:提高航天员的效能、极端复杂环境的预先探测、长时间自主值守、提高航天员安全性。
2.1 提高航天员工作效能
阿波罗计划在月面的活动主要由航天员完成,主要包括月面物资搬运、月面采样作业、月面设施安装、月面拍摄、月面科学试验等[4],6次月面活动时间共计79 h 52 min。
月面机器人主要作用是提高航天员的工作效能,从阿波罗已开展的月面活动看,月面机器人可通过替代、协作等方式分担航天员的工作量,见表1,降低航天员出舱或远距离作业的次数,减少航天员重复性及准备性活动,将航天员有限的月面驻留时间投入到更具智慧性的作业活动中。
化工工业园区的发展离不开严格的安全环保管理制度。据工业区发展有限公司董事长孙莉军介绍,几年前,工业区曾为化工企业产生的废气废水扰民、污染环境而深感头痛。通过3年环境综合整治,工业区关停了44家小化工企业,使经济发展和环境质量改善呈现两升三降的良好态势,即工业产值年均增长21%,税收年均增长17%;环境信访量年均下降36%,万元产值能耗年均下降13%,区域VOCs排放量比2016年下降17.6%。经过艰辛努力,通过执行一整套行之有效的管理制度,一定程度上解决了长期困扰工业区发展的环境问题。“对于化工园区来说,安全环保永远在路上。”孙莉军如是说。
2.2 极端复杂环境的预先探测
随着月球探测活动的深入,各国将探测的目的地瞄准了月球极区。月球极区相对于中低纬地区存在大量撞击坑,地形环境更加崎岖,温度更低;对于有科学研究及工程应用价值的阴影区、熔洞[5](图1)等地形,由于没有光照,环月探测的先验信息更少。为了提高航天员作业的安全性及可靠性,机器人可对航天员探测的路线进行预先巡视,排除探测路线中的危险因素,并提供收集航天员高安全、高产出地完成后续任务的地形、环境、科学探测目标等重要信息。

图1 月面熔洞与地球熔洞参照图[5]Fig.1 Lunar pit and the reference in earth[5]

表1 机器人与航天员联合系统月面作业建议Table 1 Suggestion on lunar operation for the robot and astronaut system
2.3 长时间自主值守
航天员返回阶段后,机器人可替代航天员开展持续性的科学试验、维修维护、物资回收、值守监测等作业任务,增强及巩固载人月球探测的成果及效益,使月面驻留与活动系统长时间有效健康运行。
2.4 提高航天员安全性
在航天员在月面舱外工作时,机器人移动伴随航天员,在航天员发生紧急情况时,机器人可对航天员开展辅助、救援和应急运输返回的操作。
3 航天机器人的发展现状
3.1 航天器舱外工作的机器人
国际空间站(ISS)是目前空间机器人系统应用较多、较成功的应用领域,配备了加拿大机械臂SSRMS(Robotic Systems for the International Space Station)、日本实验舱机械臂JEMRMS(Japanese Experiment Module Remote Manipulator System)、灵巧机械手SPDM(Special Purpose Dexterous Manipulator)、机器人航天员Robonaut2等机器人系统,形成了大中小多规格、舱内外全范围、工程应用与技术验证并重的立体化配置格局[6]。机器人系统主要用于空间站组装、货物搬运、载荷照料、舱内外巡视、航天员辅助作业等活动,大大减轻了航天员出舱风险,减轻了航天员的工作压力,提高了在轨作业活动的效率。2011年,国际空间站的机器人系统开展了机器人燃料加注演示任务(Robotic Refueling Mission,RRM),实验中灵巧机械臂SPDM利用4个特制的RRM工具(图2),演示全套的卫星维修和燃料加注任务,包括切割和操纵防护毯及电缆线、拧开防护盖和接通阀门、传输液体等复杂操作[7]。

图2 机器人在轨加注任务(RRM)[7]Fig.2 The robotic refueling mission[7]
我国空间站在建造阶段将配备核心舱、实验舱机械臂2套机器人系统,核心舱机械臂主要用来完成空间站舱段转位与辅助对接、悬停飞行器捕获与辅助对接、支持航天员出舱活动(EVA)等[8],实验舱机械臂主要用以暴露载荷照料、光学平台照料、载荷搬运、支持航天员EVA等活动[9]。
3.2 独立行走探测的星表机器人
月球探测及火星探测中的星表巡视器也是典型的移动作业机器人系统,如苏联的月球车、我国的嫦娥三号巡视器“玉兔号”、嫦娥四号巡视器“玉兔二号”,以及火星巡视器如“索杰娜”、“勇气号”、“机遇号”及“好奇号”等[10]。该类星表巡视器主要通过携带的工程设备或科学载荷开展作业,以实现设定的科学目标与工程目标。巡视器主要通过远程遥操作或局部自主实现控制。
美国的“好奇号”火星巡视器(图3)是目前最复杂的星球车,其设计行程远、续航能力强、样本采集能力强、任务复杂、配置了多样的科学仪器[11]。其沿用了经典的六轮摇臂式移动机构,可翻越约65~75 cm高的障碍物,在平整坚硬的地面上行驶的最高速度可达到46 mm/s,为保证安全平均速度低于10 mm/s。其具备样本获取、样本处理和传递系统(Sample Acquisition/Sample Processing and Handling System,SA/SPaH)[12],一个2 m长5DOF的机械臂能够操纵安装在转台上的工具和5个科学仪器,包括取样钻机、取样勺、取样筛分分组装置、除尘工具、阿尔法粒子X射线分光仪、手持透镜成像仪。

图3 “好奇号”火星巡视器[11]Fig.3 The Mars rover curiosity[11]
对于独立行走探测的星表机器人,国内外研究机构也提出了较多新型机器人方案,如图4,此类机器人突破了传统“车”的概念,特别适应月面复杂极端的地形环境探测。

图4 新型星表行走探测机器人方案Fig.4 Novel mobile robots for planetary exploration
3.3 面向人机协作的空间机器人
人-机-环境共融的机器人是目前地面机器人研究和发展的热点,面向与航天员协作的机器人也是空间机器人的发展趋势之一。
NASA研制的第2代机器人航天员Robonaut2[19-20]是典型的人机协作机器人,其在国际空间站进行了技术验证,同时为应对出舱服务为机器人升级了双腿的移动系统(IVA Mobility system)。俄罗斯也研制了仿人机器人SAR-401[21],计划面向国际空间站内部及外部操作应用。仿人的Rollin′Justin机器人[22]、具有多种运动模式的仿黑猩猩机器人[23]、四足仿生移动作业机器人[24]等为发展面向人机协作的空间机器人提供了有益的思路,见图5。
4.3.1 航天员移动伴随及应急救援
从载人航天空间站、月球探测、火星探测中机器人开展的活动来看,当前机器人系统的技术水平已具备了开展较丰富月面活动的能力[25],在操作、移动、控制等方面具有了较好的工程基础;在有人参与的月面活动中,按照当前人机协作的技术发展思路,航天员与机器人组成的人机联合探测系统,将提升航天员的作业效益,同时也将丰富机器人的作业能力。
4 月面机器人系统构想
4.1 月面活动发展设想
机器人和自动化系统是航天员的感官和肢体的扩展和延伸,可以显著提升航天员的工作效率和效能。在登月前无人验证阶段、航天员首次登月阶段、月球站建设阶段对月面机器人均有较强的配置需求。
按照月面机器人的应用特点进行划分,月面活动可设想为3个阶段:
1)机器人探测准备阶段。在载人月球探测任务的初期,应首要验证月面着陆返回能力,先期部署月面设备,为载人任务做准备。可利用无人着陆上升器飞行试验的机会部署机器人系统,由机器人系统提前收集重要数据资料,提前准备航天员活动设施及工具,提前验证关键技术。

图5 面向人机协作的机器人示例Fig.5 Some examples of Tri-Co robots
2)支持航天员首次登月联合作业阶段。在载人月球探测任务的中期,主要目标为实现首次载人月球探测,后续建立月球实验室,实现航天员短期的月面驻留。此阶段机器人系统将围绕航天员开展航天员月面活动保障、人机联合探测,提高航天员作业效率及安全性。
3)月面科研站建设阶段。在载人月球探测任务的远期,主要目标为依靠月面资源支持实现长期驻月,建立月球站居住设施、月面电站、月面实验室等设施,开展长期的月面科研实验活动。此阶段机器人系统主要用于资源开发、月面制造、设施建造、月面试验等。
4.2 机器人先导巡视探测
4.2.1 着陆区域巡视详查
为了保证航天员首次登月的安全性及提升首次任务的效益,月面机器人开展航天员登月区域的预先巡视详查,获取着陆区详细的数据信息,建立三维地形。机器人需具备非结构化地形高效移动能力,如通过轮式、足式、轮足复合式等新型机构实现在月面地形的行走移动;机器人需具备自主导航及路径规划能力,可建立着陆点附近的高精度三维地图,预先探索后续航天员的探测路线;机器人的主要活动区域可为中低纬地区或南极地区,可完成选址区域方圆数公里范围多个预选地点的地形探测。
4.2.2 机器人采样
机器人需具备样本的识别能力,可通过自主测量或地面远程判断筛选有价值的样本;机器人具备采用工具对不同几何尺寸特征的样本进行采集能力,采集手段包括抓取、铲取、钻取、敲击等,这对采样工具的设计及机器人对工具的使用均提出了较高的要求;机器人需具备样本转移能力,包括转移至着陆上升器容器或临时集中点。机器人采集月岩、月壤等样本,若有返回器,机器人可装载返回器带回;采集样本也可集中存储,供载人任务时航天员集中带回;机器人可清理预选着陆区,清除小型岩石障碍。
4.2.3 航天员工具及设施的预先布置
其次,教师应该在教学过程中突出学生的主体地位。可以将学生分成学习小组,引导学生针对某一案例进行讨论,让学生真正参与到学习中来。教师和学生之间的交流沟通越多,就越能够提升学生学习的积极性和主动性,有利于提升课堂教学质量,促进学生的健康发展。
机器人可从着陆上升器卸载物资,支持后续载人任务;提前在后续载人任务预选点布置设备,包括通信天线、导航信标、能源、光源、航天员作业工具等。机器人具备对物资、设备及工具的解锁、抓取、转运、展开、组装、调试的能力。
4.2.4 制氧、原位资源利用等技术先期验证
无人验证阶段可对后续任务的关键技术进行先期验证。机器人可开展技术验证载荷的卸载、投放、展开、安装、调试,如制水、原位制氧、月壤烧结、原位资源3D打印、月面材料长寿命生存等小样本先期实验载荷。为完成此类操作,机器人需具备对载荷设备的解锁、抓取、转运的能力,具备对科学仪器开展组装、调试、精细操作的能力。
4.3 支持航天员首次登月联合作业
“我妈去世以后,我爸爸的生活明显凄凉了很多。上次见他,衣服上的扣子都掉了几个。要是我妈活着不至于这样,很心酸。”(C2,女,36岁)
机器人具备对航天员识别、自主导航、移动跟随的能力,可实现机器人对航天员实时自主的伴随;具备视觉跟踪能力,通过视觉对航天员识别和云台的跟踪控制,实现机器人对航天员作业过程的实时拍摄;具备设备、载荷、工具等运输的承载能力,具备运输航天员的负载能力。机器人可移动伴随航天员,对移动员移动作业提供保障支持,对航天员作业过程进行拍摄记录,对航天员工具、设备进行运输,紧急情况下可运输航天员返回。
4.3.2 人机联合作业
1.2.3 供试品溶液的制备 精密称取NOR、OFL、TC、OTC、SDZ、SMZ对照品适量,用自然水(已用5 mol/L HCl调节pH至3.0左右)分别稀释制成1.0、2.0、2.0、3.0、1.0、1.0 mg/mL的样品贮备液。分别精密量取上述样品贮备液各1 mL于50 mL容量瓶中,加自然水30 mL,用测试用缓冲溶液定容至刻线,摇匀,用0.22 μm微孔滤膜过滤即得。临用前配制,超声处理10 min。
机器人可与航天员开展联合采样、科学试验、维修维护等作业。该需求对机器人的协作性提出了较高的要求,机器人应具备类似航天员的作业空间和作业能力,与航天员在同一现场协同作业的安全性较高。
4.3.3 机器人局部自主作业
夏天呆呆地坐在那里,他害怕失去奶奶,从小到大,奶奶就是他的天就是他的地,奶奶教会了他一切,教他像一个正常人那样穿衣吃饭说话,甚至让他读书上学,他还学会了调琴。现在奶奶要走了,他的世界一下子坍塌了,奶奶领他走到了光明的入口,就要挣开他死死牵着的手,他觉得世界一下子又黑暗了,那些高楼、那些树木、那些街道、那些五彩的阳光和云朵,还有人群……那些因为奶奶而构造起来的世界,也要随奶奶走了,它们就要被风吹散了,或者轰隆一声向他倾倒过来。
测量并记录两组患者HbAlc(糖化血红蛋白)、FPG(空腹血糖)、2 hPG(餐后 2 h 血糖)[3]。
综上,机器人支持航天员首次登月联合作业阶段的任务场景及典型任务如图6所示。

图6 支持航天员首次登月联合作业阶段设想Fig.6 Conception of the first astronaut-robot joint exploring mission
4.4 月面科研站建设任务
机器人主要围绕月面科研站建设开展资源开采、设施建造、设备维修等主线任务(图7),同时可根据需求灵活配置小型机器人系统开展极端地形探测及舱内值守等支线任务。

图7 月面科研站建设任务Fig.7 Construction tasks of lunar scientific and research station
4.4.1 月面设施的建设、组装、3D打印
利用月面作业机器人开展航天员居住设施的建造与组装,包括建造原材料的采集、建筑用砖的制备、3D打印、居住舱的建造、居住舱内部设备的布置及安装;利用月面作业机器人开展太阳电池阵列组装,建设太阳能电站;利用月面作业机器人建设月基通用中继平台,建立月面通信与组网。
4.4.2 月面资源采集、开采和利用
首先,从《试点办法》第5条第2款的规定来看,值班律师的工作场所是法院和看守所。长此以往,值班律师同法院和看守所的工作人员可能会形成一种一荣俱荣、一损俱损的利益共同体关系。在这样一种休戚与共的环境之中,如果不将值班律师定位为犯罪嫌疑人、被告人利益的维护者(辩护人),那么值班律师很有可能将自己视为为国家服务的“国家法律工作者”,从而尽力去配合公安司法机关对认罪认罚案件的处理,这时的值班律师实际上充当了办案人员说客的角色。如果这样,就会对本处于弱势一方的被告人的诉讼地位更加不利。
月面原位资源开发、利用是未来地月空间开发和月球基地建设的必要手段,可利用月面自主采矿作业机器人开展月面原位资源的挖掘、收集及利用,如氦-3(He-3)等。
4.4.3 月面系统的精细化维修
机器人可开展居住舱、着陆上升器、载人月球车、能源通信等月面科研站设施的日常检测、维修与维护。在月球基地无人状态下,机器人可开展基地的维护与值守。
分别以G40沪陕高速公路、G2京沪高速公路中的某互通为研究实例,对3路和4路相交互通增设匝道的具体设计进行系统分析:
4.4.4 极端地形环境探测
5)在不同的阶段可择机灵活搭载多种不同类型的小型极端地形探测机器人,用于开展月面极端地形探测或执行特殊任务,以扩展月面机器人的作业范围及作业尺度。
4.4.5 舱内陪伴及值守
为解决月球基地航天员长期驻留的心理健康问题,可配置具备情感生成、表达和行为规划能力的陪伴值守机器人。面向月球长期驻留,舱内陪伴及值守机器人也可以在无人期间开展居住舱舱内的维修、维护、长期值守。
4.5 各阶段机器人配置设想
针对月面机器人在各阶段的任务需求,按照有限规模、多功能集成的原则,各阶段机器人的配置设想如下(图8):
1)在机器人先导巡视探测阶段,配置1~2套多功能集成的探测作业类月面机器人系统,主要按不同着陆地区配置,目前的规模1次1个机器人比较合适,布置于中低纬地区或极区,主要定位于着陆及作业区域中远程范围的巡视详查作业;
开口钢管桩在成桩过程中形成土塞,其承载力性能很大程度上受土塞效应影响。结合以上研究分析,考虑土塞与管桩内壁的摩阻力及桩端土承载力,提出了管桩承载力的表达式:

图8 不同发展阶段月面机器人配置设想Fig.8 The conception of robot configuration in each stage
2)在支持航天员首次登月联合作业阶段,配置1~2套多功能集成的服务作业类月面机器人,主要定位于配合航天员辅助作业、联合作业及安全保障支持;
3)在月面科研站建设阶段,可配置多个建造工程类月面机器人,主要用于月面工程作业及长期基地的建造;
4)在提高机器人月面寿命的前提下,在不同阶段配置的机器人可组成多机器人系统协同作业,提高作业的复杂度及效率;
机器人作为航天员肢体的延伸,开展极端复杂地形内的巡视、作业;机器人具备月面极端地形适应能力(月坑、崖壁、陡坡、溶洞、多障碍物环境等)。
4.6 各阶段机器人方案设想
预制光缆采用预制舱内集中配线方式时,由于集中转屏柜的预制光缆根数较多,若直接将光缆余长收纳在屏柜周边光缆槽盒内或集中转屏柜下方,对空间要求较大,且日后检修、维护困难。针对该问题的余长收纳方案有两种:
4.6.1 月面探测作业机器人
探测作业机器人主要开展着陆区域巡视详查、复杂地形先期探测、资源探测、采样、航天员工具及设施的预先布置等任务。
武汉市博物馆馆藏重器,是武汉近郊盘龙城出土的青铜大圆鼎,它的出土,对研究我国商代前期青铜铸造工艺的发展水平具有重大意义。
根据对任务及功能要求的分析,结合机器人发展的水平,探测作业机器人的能力及指标为:机器人质量不大于150 kg,探测距离优于10 km;移动能力速度优于1 km/h,越障高度优于0.5 m,爬坡坡度优于30°;具备自主导航能力,导航实时性优于1 s,地图范围优于50×50 m,地形识别准确率优于95%;具备抓取目标的目标感知能力,位置精度优于1 mm@1 m,姿态精度优于3°;具备月面通信和对地、对月球轨道站、载人月球车、航天员、着陆器、中继星等设施的通信能力;配置太阳翼或电池自行解决能源供给问题,并可对载荷供配电。
对于探测作业机器人,其侧重于中远程范围的高效巡视作业。本文提出的探测作业机器人方案(图9)设想如下:

图9 探测作业机器人设想Fig.9 Conception of lunar exploration robot
1)探测作业机器人移动具有多种实现方案(表2),本文选择了融合腿式地形适应能力和轮式高速高效性能的轮腿式移动机构;腿数选择具有冗余度和高速静态行走能力的六足形式,可实现在月面复杂地形的高效行走;
2)操作系统配置5~6 DOF机械臂及可切换的末端作业工具,实现样品收集及载荷设备操作等作业;
3)导航系统采用双目相机、避障相机、激光雷达、惯性组件等多传感器进行自主导航,实现三维地图创建;
4)有效载荷系统携带支持后续载人任务的信标、通信、能源等工程载荷设备,以及配置水冰探测、制氧验证、原位资源利用验证等科学载荷等;
5)人机交互系统主要布置于地球端,可以遥操作控制远端的月面机器人。
航天员返回后,机器人通过远程遥操作控制或局部自主,开展持续性的科学试验、维修维护、物资回收等作业,巩固及增强首次载人登月的成果及效益。机器人应提高智能化及自主水平,具备在任务级指令的控制下开展局部自主作业的能力,操作精细灵巧,作业功能多样。

表2 机器人移动机构的特点比较Table 2 Comparison of robot mobile mechanisms
4.6.2 月面服务作业月面机器人
服务作业机器人主要开展航天员伴随、移动辅助任务,开展航天员工具、设备运输任务,开展与航天员采样、维修维护、科学试验等联合作业的任务。
4)有效载荷主要配置用于采样、维修维护、联合作业的末端载荷或机载载荷;
根据各阶段机器人配置的设想,本文对各阶段的机器人进行了初步概念设计。
林泰安给人家写了不少状纸,得罪了一些人,后来就有人给族长传话,说他不是林家后代,而是他母亲娘家的人,是戴家的子孙。
对于服务作业机器人,其侧重可辅助、联合及替代航天员的灵巧协作操作作业能力,本文提出的服务作业机器人方案(图10)设想如下:
1)机器人采用“仿人上肢+移动基座”的基本配置思路,机器人上肢体型与身穿航天服的航天员的相似,方便人机系统可共享使用航天员的工作空间及工具,保证机器人对于航天员的可替代性;且对于构型及操作特点类似航天员的双臂拟人机器人,航天员可以更自然、直观的方式进行交互;机器人上肢由两条7自由度的手臂、五指灵巧手或专用工具、3自由度颈部、2自由度腰部、作为传感器平台的头部、躯干部分(内置机器人的核心处理器)等组成;
2)移动基座可采用轮式或足式机构,鉴于上肢结构已具有较多自由度,为降低系统复杂程度,采用4轮式移动底座;
3)导航系统在探测作业机器人的基础上,增加航天员的肢体识别与运动跟踪能力,实现航天员的安全规避及自然跟随;
根据对任务及功能要求的分析,结合机器人发展的水平,服务作业机器人的能力及指标为:机器人质量不大于150 kg;机器人具备与航天员相当的操作能力,可共享航天员的操作空间及操作工具,末端操作力≥10 kg,作业半径≥1 m,末端操作精度优于1 mm;可通过更换操作工具扩展末端作业能力,配置包括抓取、采样、钻取等多类典型操作工具;机器人具备多模式交互方式,机器人具有与航天员协作的高安全性;具备月面通信和对地、对月球轨道站、载人月球车、航天员、着陆器等设施的通信能力;机器人能源由机器人系统自行解决,具备对载荷的供配电能力。
5)人机交互系统包括位于地面测控中心遥操作人员端及月面航天员2套设备,遥操作可控制远端的月面机器人,与机器人在同一现场作业的航天员也通过语音、手势、交互设备等多模式手段与机器人自然直观交互。

图10 月面服务作业月面机器人设想Fig.10 Conception of lunar service robot
4.6.3 月面建造工程机器人
月面建造工程机器人主要定位于月面工程作业及长期基地的建造,开展有人月球基地建设与维护、月面大型设施搬运及组装等任务,开展月面资源开采和利用等原位建造任务。
月面科研站建设阶段月面活动已形成一定规模,可根据任务的具体需求配置专业化的多类机器人系统,如大型空间机械臂、3D打印机器人、制砖机器人、采矿机器人等。
4.6.4 月面极端地形探测机器人
轻小型极端地形巡视作业机器人是月面探测作业机器人系统的良好补充。对于月坑、陡坡、多障碍物环境等月面极端地形,配置极端地形巡视机器人可执行月面极限位置的探测工作。根据对任务及功能要求的分析,月面极端地形探测机器人的能力及指标为:机器人质量不超过30 kg,携带载荷质量不少于5 kg,可适应月面特殊地形、极限温度、月尘等环境。
月面极端地形探测机器人根据主任务或扩展灵活搭载配置,并根据任务制定的科学目标配置有效载荷,机器人平台因地形的不同可选择绳系机器人、滚动机器人、多足仿生爬行机器人、弹跳机器人等,见图11。

图11 极端地形的探测机器人配置建议Fig.11 Configuration recommendations for lunar extreme-terrain robot
5 关键技术
5.1 机器人非结构化地形移动及自主导航
月面机器人在月球表面的移动,需考虑多种月面特殊地形地貌的特点,如月海与类月海(大型撞击盆地)、高地、山脉和峭壁、撞击坑(包括撞击环形坑、辐射线及与撞击相关的隆起构造)、月谷和月溪等。针对上述地形地貌的要求,需解决在特定构型、多约束条件下的机器人高效移动通过性问题。目前一些新概念仿生机器人、轮腿式、可重构、可折叠机构的设计思想可考虑用于月面机器人,利用多模式移动步态实现对非结构化地形的主动适应。
为提高月面机器人在月面移动的自主性,机器人系统需实现高精度自主导航与定位,解决月面环境感知与识别、位置与姿态确定、自主智能路径规划的问题(图12)。对于环境感知与识别,机器人可通过导航相机、避障相机、激光雷达以及其他敏感器对机器人近距离范围内的地形进行感知建模与同步建图,识别障碍和危险地形;可考虑基于天文、视觉、惯性等方法实现绝对位置、相对位置、姿态的高精度确定;机器人根据当前的位置和姿态、近距离环境感知结果以及地面遥操作系统指定的远距离目标点位置,进行局部路径点分解和局部路径规划,保证月面机器人安全到达远距离目标点。

图12 月面机器人自主导航与定位原理Fig.12 Principle of autonomous navigation and positioning for lunar robot
5.2 适用于月面多功能任务的精细灵巧操控技术
根据月面机器人多功能、多样性、多环境作业的特点,月面机器人需要解决多功能操作执行器如何集成化、通用化体系配置的问题,提升操作执行器精细化作业能力。如机器人在有限资源的约束下,末端工具可配置多指灵巧手及特殊工具兼顾通用化或专用化需求,并配置工具箱或工具塔用于切换或更换工具(图13)。针对任务多样性的要求,机器人的操作机构需要能够根据目标载荷形状、大小、惯量和运动方式的不同,解决相应任务策略、操控方法、运动规划、柔顺控制等控制方面的问题。
月面机器人是集成了移动基座、臂、手、眼的复杂平台,多自由度和多传感器信息处理增加了计算和处理上的复杂程度,同时增大了系统的控制难度。为了提高移动的快速性和稳定性、操作的灵活性和安全性,需要根据任务特征与现场环境等多种约束条件,解决机器人移动平台、臂、手、眼协同控制的问题,提高作业的安全、效率,降低系统的功耗等。
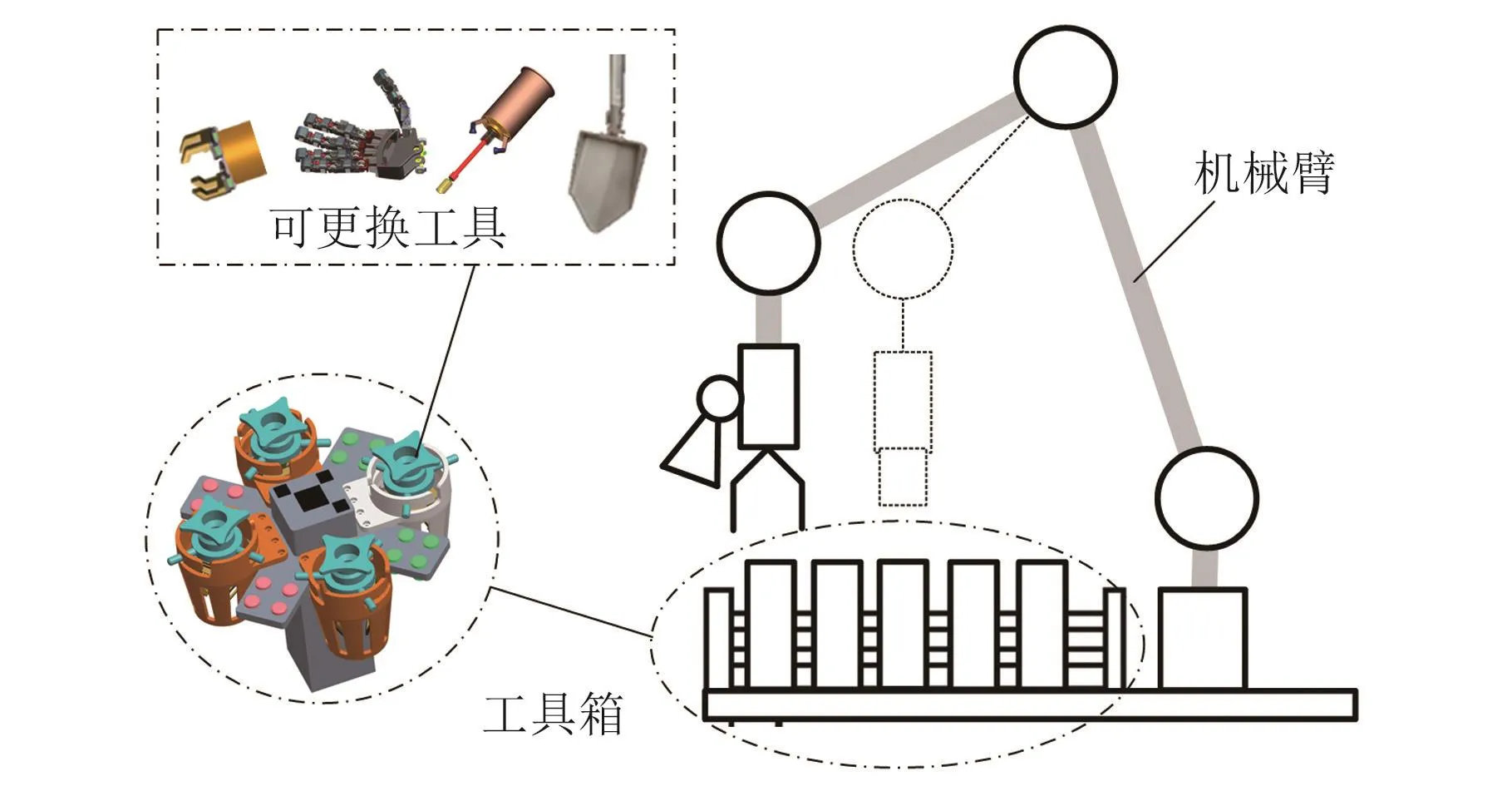
图13 机械臂与多功能工具箱示意Fig.13 Manipulator and multi-function toolbox
月面机器人通过搭载钻取、挖掘等作业载荷可提升作业能力,机器人作为平台需要解决载荷作业过程中作用力及力矩的保持及能量吸收、基座稳定性等问题,保证为载荷作业的完成提供较优的平台基础条件。
5.3 人-机-物共享空间下的安全协作
“人机协作、人机共融”机器人的设计理念及相关技术,对于人机联合作业的航天员-机器人系统具有良好的借鉴作用。在有人参与的月球探测活动中,机器人与航天员需要在同一共享空间内工作,需要解决航天员、机器人、载荷设备共享工作空间时的本质高安全问题,确保机器人工作时不给航天员及周边有效载荷及平台设备带来安全威胁或隐患。可考虑开展刚柔一体化人机协作型机器人的设计,使得机器人与外界发生接触时具有柔顺适应能力;可通过在机器人的连杆或驱动关节中引入弹性元件或柔性机构,使得机器人具有高柔顺性、良好的缓冲功能,如弹性串联关节或可变刚度关节(图14);或通过关节空间的力矩控制使机器人获得主动的柔顺性;或通过在机器人表面布置丰富的传感器系统,如电子皮肤,让机器人充分感知外部世界及时作出判断及执行决策。

图14 串联弹性关节技术原理Fig.14 Principle of tandem elastic joint
5.4 航天员行为意图感知解码及交互
在确保航天员安全的前提下,机器人需要能够自主提高技能,实现与人自然直观交互。对航天员而言,机器人不再是单纯的作业工具,而是一个助理,二者紧密协调。需要解决机器人对航天员肢体的感知、对航天员行为意图的预先理解及反应式行为规划的问题,实现航天员对机器人知识传授。解决途径如通过动态目标的碰撞检测与避障算法实现反应式行为规划能力,通过基于多模态信息(人体姿态、多普勒效应、牵引示教等)深度融合的人机交互,实现人的行为解码及知识传授与增强。
5.5 月面多机器人协同定位与控制
多个机器人组成的群体机器人系统间协调协作,其能力大于单机器人能力的简单叠加,而且群体中单个机器人结构进一步简单、体积变小、任务专门化,可大大提高机器人工作的可靠性,甚至完成单个机器人无法实现的复杂任务。多机器人协作时,需要解决多机互定位、多机通信、多机数据融合等关键问题。多机器人均建立完整的导航与定位系统是不经济的,可考虑在多机器人系统间建立高可靠性、带宽与能耗均衡配置通信网,通过融合无线通信网定位、惯性导航航位推算自主定位等方法实现作业区域内分米级的多机器人定位技术体系。
5.6 机器人月面极端环境适应性技术
月球表面的极限温度在+150~-180℃。对于月球极地地区,其温度在-30~-180℃。对于月球极地的永久阴影区,典型环境温度可能低于-203.15℃。针对上述极端温度的挑战,需要从适应性设计、防护性设计以及系统配置等方面解决机器人在极端深冷环境下的运行与存活问题。
月球表面月尘会加剧机器人机构的磨损和堵塞,降低设备的气密性,削弱散热能力,降低光学设备的透光率。机器人的设备及载荷需解决月尘防护的问题。
面向月面的长期驻留及月球站建设,月面机器人系统还需进一步提升可靠性和寿命,实现在月面极端环境条件下工作存活5~10年。
6 小结
月面机器人是未来载人月面探测系统中不可或缺的组成部分,可保障航天员的安全,辅助航天员更高效、高产地完成月面作业任务,可开展更长时间、更广区域的月面作业。随着当前机器人技术的发展,月面机器人将在未来的月面活动中发挥重要作用;人机协作探测是国际月球探测的潮流,也将是未来中国载人月面探测的亮点。
面向未来有人参与的月面探测,建议按照有限规模、多功能集成的原则,各阶段循序渐进配置巡视作业、服务作业、建造作业的机器人,逐步形成多机协作的机器人群系统,并解决月面机器人在系统、移动、操作、感知、交互、环境适应等方面的关键问题。
