月面人机联合采样探测发展趋势与任务设想
2019-10-31姜生元刘君巍张伟伟邓宗全赖小明邓湘金赫梅列夫弗拉基米尔戈雷赫罗曼
姜生元,刘君巍,张伟伟,邓宗全,赖小明,邓湘金,赫梅列夫·弗拉基米尔,戈雷赫·罗曼
(1.哈尔滨工业大学机电工程学院,哈尔滨150001;2.中国空间技术研究院,北京100090;3.阿尔泰国立技术大学比斯克工艺研究院,比斯克659305)
1 引言
月球是地球唯一的天然卫星,因其独特的自然环境与矿产资源,成为人类开展星球探测的主要目标[1-3]。进入21世纪以后,随着空间技术的进步和空间应用需求的扩展,美国航空航天局(NASA)、欧洲航天局(ESA)、俄罗斯航天局(RAKA)和日本宇宙航空研究开发机构(JAXA)等国际航天机构都制定了各具特色的载人登月探测计划[4-7]。
采样探测作为人类勘查月球资源分布情况、获知月球形成与演化过程的重要手段,在空间探测任务中被广泛应用[6-8]。与无人采样探测任务相比,有人参与的月面采样探测任务内涵更加丰富,探测手段更加全面,探测过程更加灵活,探测能力也更加强大。同时,载人登月模式也会为采样探测任务带来新的机遇与挑战[9-11]。
本文基于月球资源探测技术发展现状,分析月面人机联合采样探测面临的新挑战及未来发展趋势,提出载人登月模式下月面采样探测任务构想,以期为我国载人登月科学探测任务论证提供参考。
2 月球资源探测技术发展概述
月球资源探测活动可追溯到20世纪60年代,根据探测方式差异,有遥感探测、采样返回分析和原位采样探测等类型。半个多世纪以来,人类利用上述探测方式开展了百余次月球探测活动,获得了380多千克月球样品,科学家对这些样品进行测试分析并结合遥感数据,正在逐渐揭示月球的秘密[11-14]。
2.1 环月遥感探测
环绕遥感探测是对月球资源进行测绘的重要手段,未来的发展趋势是利用遥感卫星或者星座技术进行在轨多点探测和立体测绘。
1994年美国发射克莱门汀探测器,目的是在长时间暴露的太空环境下测试传感器和航天器部件,并对月球和近地小行星1620进行科学观测。探测器上搭载了紫外/可见光相机、近红外相机、激光雷达、长波红外相机、星跟踪器相机等有效载荷。该任务获得了月球数字高程模型和全月高分辨率多光谱图像,取得大量详细、精确的月球探测数据。从轨道器向月表发射雷达回波信号,在地球上接收反射回来的雷达波,根据回波信号反演出月球表面物质的相关性质(图1)。它第一次获得了月球南极可能存在水冰物质的直接探测证据,但有些学者认为这种回波异常并不一定是由水冰物质引起的[15-17]。
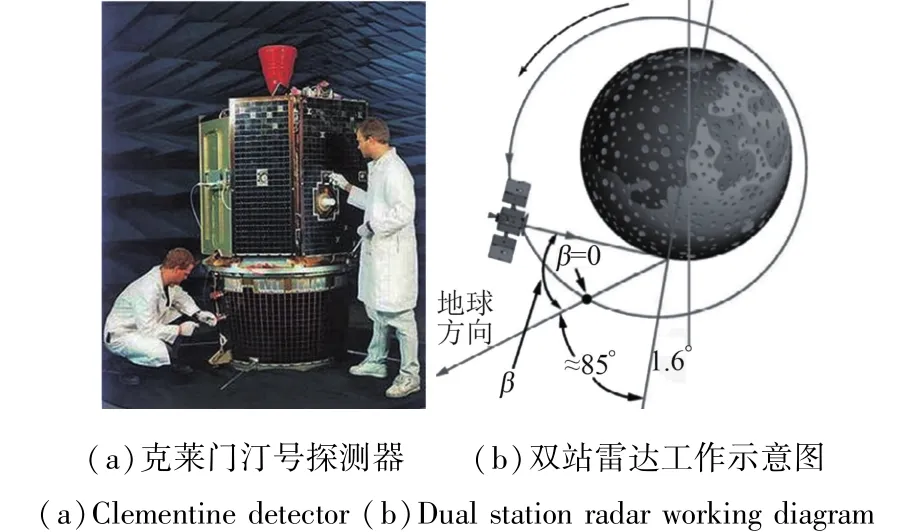
图1 克莱门汀号及其双站雷达探测原理Fig.1 Schematic diagram of the Clementine detector and its dual station radar
1998年美国发射月球勘探者探测器,它是一个近月低轨环绕探测器,通过遥感探测方式获得月球表面磁场、重力场、月球脱气以及极区冰沉积物分布等数据。该探测器搭载了伽马射线光谱仪、中子能谱仪、阿尔法粒子能谱仪、多普勒重力实验仪、磁力计及电子反射计等有效载荷。伽马射线光谱仪探测月球铁、铀、钾、钛、硅、铝、钙和钍等金属元素的含量,并成功反演了月球矿物元素的分布状况[18]。中子能谱仪用于月球氢分布探测,以此来推测月球中水的存在。探测结果表明,月球两极存在丰富的氢元素,而且北极的氢信号比南极的稍强(图2)。但也有不同的观点认为,上述氢元素信号的存在并不一定代表月球含有水,可能是其他含氢化合物或者羟基。

图2 月球勘探者探测到的月球70°~90°N和70°~90°S中子通量(反映氢含量)分布结果Fig.2 The distribution of neutron flux(reflecting hydrogen content)of the Moon 70°~ 90°N and 70°~90°Sdetected by Lunar Prospectors
2003年ESA发射Smart-1探测器,搭载了光谱仪和相机等多种载荷,用于研究月球地形、地貌及矿物学特征,并进一步探究月球南极是否存在水。
2005年美国发射深度撞击号(包含飞掠器和撞击器两部分)探测器,搭载了高分辨率相机和中分辨率相机(图3)。高分辨率相机具有光谱成像模块(包括可见光相机、滤光轮及成像红外光谱仪),可检测波长为1.05~4.8μm的光谱。深度撞击号在发射几天后,在奔赴彗星的途中对月球开展了短暂的遥感探测。在飞掠月球时,利用红外光谱仪对月球进行遥感分析,在极区的表面发现疑似H2O/-OH的信号[19-22]。
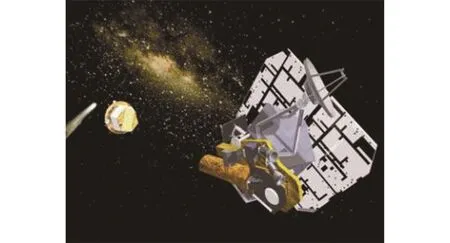
图3 深度撞击号探测器Fig.3 Schematic diagram of the Deep impact
2008年印度月船一号探测器成功发射。主要目的是探测月球表面成分(包括极区冰沉积物、磁场、重力场、月球脱气)。它搭载了超光谱图像仪、三维地貌立体测绘相机、激光高度计、合成孔径雷达和月球矿物质绘图仪等多种仪器。利用月表高空间分辨率数据绘制月球正面和背面的三维地图,探测极区是否存在水冰物质,绘制月表高空间分辨率的化学物质和矿物质分布图,并开展月球撞击试验,为未来月表软着陆探测任务提供实施依据。通过对月球矿物质绘图仪获得的近红外光谱数据分析,发现几乎在月球上所有纬度区域都存在羟基或水的光谱信号[22-23]。
2009年美国发射LRO&LCROSS探测器(图4)。LRO主要用于获得全月地图,了解月球的辐射环境,测量月表热能发射(为未来月表实验和探测提供信息),获得月表高分辨率遥感影像。LCROSS旨在收集和传递运载火箭撞击月球南极Cabeus坑产生的碎屑羽流数据。它搭载了近红外光谱仪、近红外摄像机、中红外摄像机和光度计等多种探测仪器。运载火箭撞击月球后产生的侵彻热量能促进月壤中产生挥发物质,利用仪器对挥发物羽流进行观测分析,发现月球南极水冰含量高达 5.6%±2.9%,挥发物中水物质占比77%[24-26]。
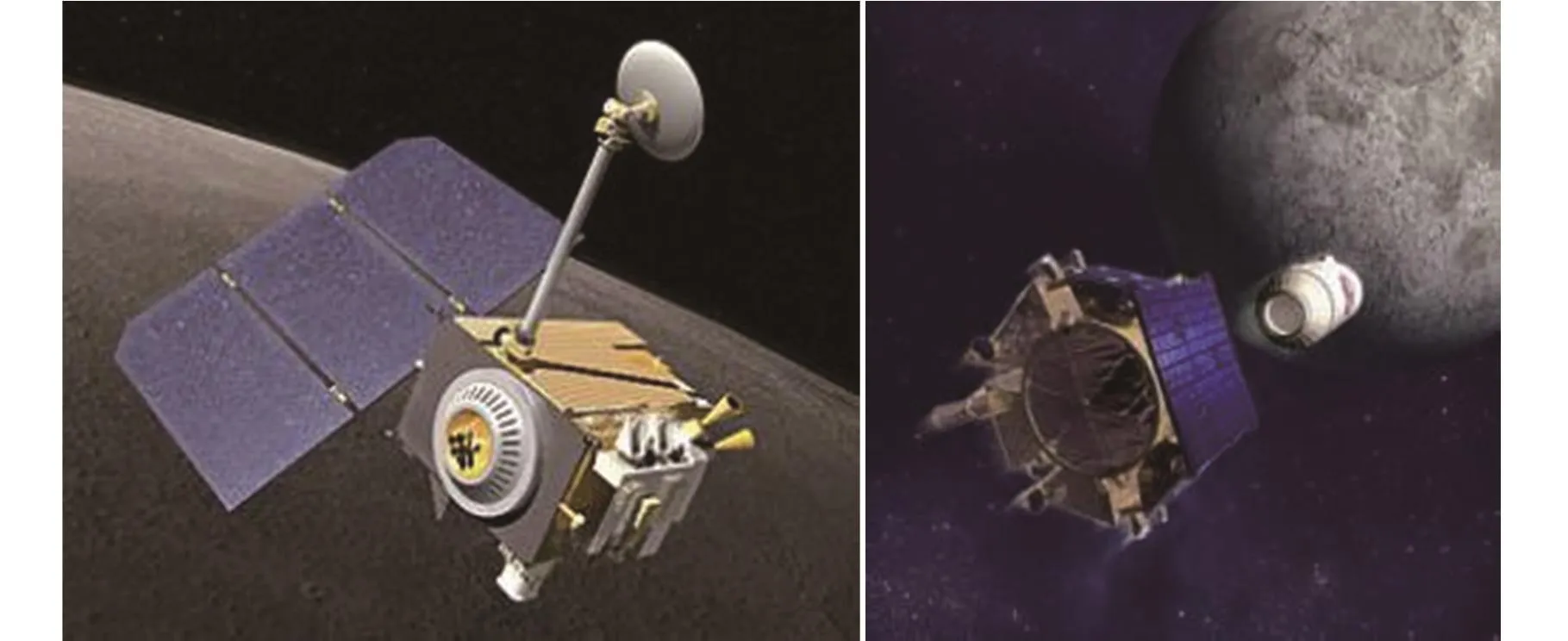
图4 LRO&LCROSS探测器示意图Fig.4 Schematic diagram of LRO&LCROSS detector
2007年我国成功发射了嫦娥一号卫星。这是我国发射的第一个月球轨道探测器,也是我国“绕、落、回”探月工程的第一步。嫦娥一号搭载了24台科学载荷,包括微波探测仪系统、X射线谱仪、γ射线谱仪、激光高度计、干涉成像谱仪等,用于获取月球表面的三维立体影像,分析月球表面有用元素的含量和物质类型的分布特点,探测月壤的厚度和地球至月球的空间环境。嫦娥一号首次利用CCD立体相机获得了120 m分辨率全月球影像图、三维月球地形图,包括月球的南极、北极。月球三维立体图像的获得在全世界范围内尚属首次。此外,嫦娥一号的X射线谱仪和γ射线谱仪可实现月球透视探测,探明14种有用元素在全月球上的含量与分布特征[27-29]。
2010年我国第二颗探月卫星——嫦娥二号成功发射。嫦娥二号作为嫦娥一号的备份星,搭载的科学载荷的性能指标较嫦娥一号同类仪器有了很大提升。嫦娥二号取得了空间分辨率7 m的全月球图像、多种元素月面分布图等多项重要科学成果,获得了迄今为止国际上分辨率最高、最清晰的全月立体图像[27,30-33](图5)。
上述遥感探测成果为人类认知月表资源广域分布、地月空间环境及月球演化历史提供了初步依据。但是受限于遥感方式的远距离、非接触、干扰因素多、数据具有多解性和精度等级较低等原理性制约,人类对月球资源及其特性的纵深分布情况尚缺乏准确认知,对月球水冰物质的赋存状态、纵深分布情况及其力/电/热学等特性的了解不多。
2.2 采样返回分析
1970至1972年间,苏联共发射3颗月球采样返回探测器(图6)。Luna 16与Luna 20采用了空心钻杆式采样装置,采样指标见表1。通过钻杆的外螺旋排除钻屑,中间的岩芯样品通过贯入方式进入钻杆内腔。Luna 16和Luna 20分别取回了101 g和55 g月壤样品。
Luna 24探测器采用了双管双袋式钻取采样装置,钻具直径为31 mm,取芯直径为8 mm。设计钻深为2.5 m,实际钻深2.25 m,采样质量170 g。通过对Luna 24采样返回的样品进行分析,发现其中含有0.1%的水[34-35]。

图5 嫦娥二号卫星获取的全月图Fig.5 Complete moon map obtained by Chang e II
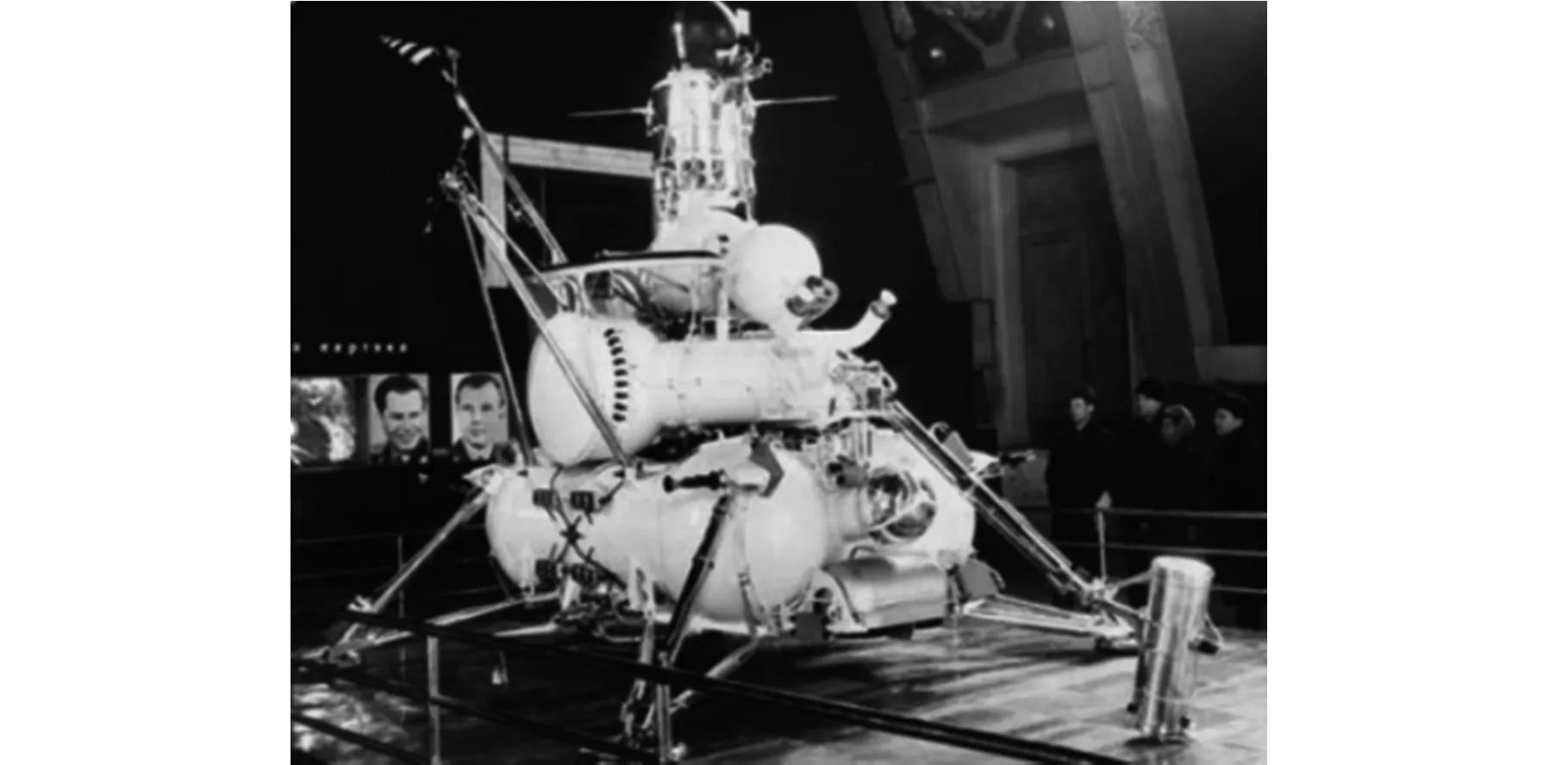
图6 Luna 16/20采样探测器Fig.6 Luna 16/20 sampling detector
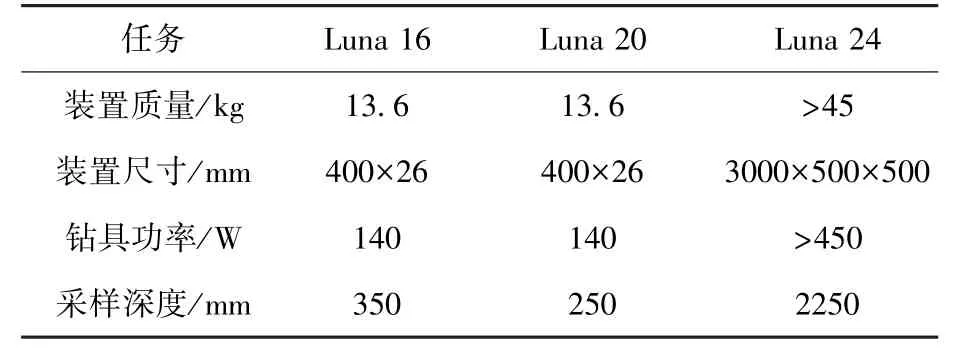
表1 苏联Luna系列月面无人自主钻取采样指标Table 1 Technical indexes of lunar surface unmanned automatic sampling in Luna series of Former Soviet Union
1969至1972年间,美国阿波罗任务成功实现了6次载人登月(图7),获得了2196个单独的岩土样品,总重量为381.7 kg。在Apollo 11、12、14任务中,航天员采用贯入式取芯管采样,用手动锤击约50次,实现70 cm深度月壤样品的采集。在Apollo 15、16、17任务中,采用ALSD回转冲击钻机,在航天员的操控下实现了3.25 m深度月壤的钻进取样任务[14,36-37]。

图7 Apollo 11、12探测器Fig.7 Apollo 11 and 12 detectors
我国发射的嫦娥三号和四号月球软着陆探测器获得了月球地质和矿物资源等探测数据,为后续我国月球采样勘察探测及月球基地建设奠定了基础[38-39]。此外,拟发射的嫦娥五号是我国首个月面无人采样返回探测器,它由轨道器、返回器、着陆器、上升器4部分组成,预计实现月面取样返回任务[17,40-41]。钻/表复合式采样技术是嫦娥五号采样探测的技术亮点,可通过一次任务同时获得次表层(钻取)、表层(铲坑)2种形态的月壤样品,预计总采样量约2 kg。机械臂可获得多点表层月壤样品。钻取采样装置预计钻深2 m,采用双管单袋取心装置,可保持纵深月壤剖面的层序信息。
通过对采回的月球样品进行实验室分析,深化了人类对月壤力学、物理和化学性质的直接认识,为人类开展月球科学研究提供了最直接的证据。有鉴于此,采样返回将是未来深空探测中最受关注的技术手段之一。
2.3 原位采样探测
因采样返回任务的工程代价较大,且存在返回物的污染防控等难题,星壤物质的原位探测方法应运而生。原位采样探测装置一般搭载于着陆在地外天体的着陆器、星球车等智能装备上,利用采样机具获取表层或次表层星壤样品,传送至分析仪器进行现场分析,或者在采样机具上直接搭载综合物性感测器件进行原位探测,最终将探测数据传回地球。
针对月球和火星水物质探测需求,美国正在研制一种移动式就位取水装置(Mobile In-Situ Water Extractor,MISWE,图8)。该装置利用深槽螺旋钻提取出浅表层月壤,然后将其转移至处理舱进行加热,提取出月壤中的水分。图9为处理舱组件、冷阱罐和螺旋钻的剖面图。在模拟火星条件下,在40 min内,消耗0.9 Whr/g能量,提取土壤中92%的水[42-43]。

图8 移动就位取水器Fig.8 Mobile in-suit water extractor

图9 处理舱组件、冷阱罐和螺旋钻的剖面图Fig.9 Sectional view of process chamber component,cold trap tank and auger
ESA正与俄罗斯航天局合作,计划在2020年发射Luna 27号着陆器,并着陆于南极艾肯盆地。其主要任务是勘探永久阴影区的矿物、挥发物组分和水冰,以研究月球资源就位利用的可行性[44]。ESA将提供全新设计的自动登陆系统以及一个勘探载荷包(包括钻探、取样、送样、处理、分析)。由意大利Finmeccanica公司设计的钻机可钻取1~2 m深的水冰-月壤混合物,然后送至由英国OPEN大学研制的化学分析腔进行成分分析。目前研究团队已经利用模拟月壤在133 K环境下进行了钻机取样测试。此外,他们还计划在2020年发射ExoMars二期任务,进行太空生物和地球化学研究,并开展火星气候演化的长期研究[45-48]。
3 月面人机联合探测发展建议
继美国Apollo载人月球探测之后,我国也正在开展载人月球探测工程的论证工作,航天员在月面开展人机联合采样探测是值得研究的重要课题。
在月球科学与现代技术飞速发展的21世纪,我国月面人机联合采样探测的科学目标和任务模式,不应该照搬美国Apollo任务,应具有中国特色。在综合月球资源遥感探测、采样返回分析、原位采样探测等国际先例的基础上,结合我国载人登月的历史背景和技术基础现状,提出以下4个方面的建议:
1)探测区域选址。月球两极是开展月面人机联合采样探测的理想区域。针对月球极区水冰在月壤剖面中的赋存与分布状态、品位和储量进行原位探测,为无人月球基地选址提供先验数据是当前月面原位采样技术的热点问题,其难点是在缺少光照的环境条件下,如何让采样设备正常开展工作。相较于浅层月壤采样探测,次表层和深达基岩的深层月壤剖面采样和原位探测更具科学价值。相较于局部、单点的采样探测,实施“广域+纵深”相互关联的采样探测,对揭示月球资源赋存和环境参量分布特性具有更加重要的科学价值。
2)科学目标。以往的月面采样探测任务主要关注月壤、月岩样品的采集和分析。我国拟实施的月面人机联合采样探测活动,应更加关注月球水冰、挥发分和稀有气体等典型物质的无污染采集和原位探测,以及次表层月壤热学/电学/化学等综合物性分布的科学探测。
3)操控作业。美国的航天员月面采样探测主要采用人工方式实施探测机具的布置和采样探测,在新时代的载人登月模式下,航天员加智能机器人的人机联合探测模式,具有安全性高、任务拓展性强、科学产出效能高等优势,需在任务规划中予以高度重视。
4)作业装备。我国的月面人机联合采样探测装备应具有创新性。除了基本采样作业所需的样品辨识工具、采样作业过程记录工具、样品采集与封装工具外,还应大力开展次表层样品低扰动、高保真取样工具、月壤剖面典型物质和综合物性原位探测工具、航天员现场操控大尺度钻探工具、机器人化采样探测工具的新概念和新方案研究。
4 月面人机联合采样探测任务设想
根据我国月球探测任务需求和采样探测技术发展情况,将未来载人登月活动中采样探测任务划分为小规模、中等规模、大规模3个任务阶段,并据此提出月表样品采样探测、广域分布式原位探测、月壤大深度剖面科学钻探的任务设想。
4.1 月表样品采样探测
在载人登月任务初期阶段,考虑到航天器的搭载能力及采样探测技术成熟度,应重点保证航天员的安全返回。航天员的活动范围有限,任务目标也相对简单。航天员需采用易于携带与操控、质量小、功耗低并具有多功能特性的采样探测装置。为充分利用探测工具及有限月面作业时间,航天员月面勘查与采样作业工具包的开发与利用极其重要。
1)航天员月面采样作业工具包。其功能是实现对不同类型表层样本的采集。考虑到不同类型样本的甄选与采集需求,研制适用于航天员操作的采样作业探测工具(图10),如手持设备或可穿戴设备。手持设备是针对表层、浅表层散体颗粒状月壤、月岩对象的采集工具,满足广域和纵深样本采集的需求。采样工具设计需要充分考虑航天员的月面活动能力与人机工程学,并满足易于携带、易于操控、质量小、功耗低、可组合使用、功能多的特点,如采样作业工具手柄可与多种类型的采样作业工具头组合使用,而采样作业工具手柄本身也可独立实现采样作业功能。
此外,需要配合手持式设备的特定辅助工具,以便配合手持设备的使用。如兼备划线、放大镜、毛刷等多种功能的划线器,兼具日晷仪、红旗标签筒等功能的比色卡,以及兼具样本采集与存储功能的封装容器。
可穿戴设备是一种集成式月面采样探测工具(图11),将航天员从携带繁多工具中解放出来,但需要充分考虑人机工程学问题。在月面上,航天员可通过手指操作集成式采样探测工具来轻松、高效地实现对样本的打磨、钻进、破碎、采集、扫描、拍照和岩石层理分析等多样工作。

图10 航天员月面勘查与采样作业工具包系统设想Fig.10 Concept of lunar exploration and sampling toolkit system for astronauts

图11 航天员可穿戴式集成采样器Fig.11 Integrated wearable sampler for astronauts
2)月面人机智能交互系统。其功能是解决航天员在月面环境下的感观失真和样品甄别问题,保障航天员月面操控作业的准确性和安全性。在采样作业工具中嵌入分布式多源传感器,考虑电磁兼容、真空环境、极端温度等特殊环境对传感器测试精度的影响。利用短距离、低复杂度、低功耗、高可靠性的空间双向无线网络技术,将应变、位移、温度等传感器有机结合,实现多传感器信息的有效融合。通过智能计算、统计、可视化及数据库等技术进行数据分析、管理,将工具中不同传感器反馈的信息高效、合理地综合成统一的特征表达信息,实现特征数据图像化显示及人机交互,为航天员采样作业智能决策提供可靠信息,保障航天员月面操控作业的准确性。
3)月壤/月岩样本辨识与分析系统。其功能是对采集的样品进行月面原位辨识与分析。受搭载能力及科学载荷的原位分析过程中的环境制约,利用科学仪器对采集到的具有代表性或重要研究价值的样本进行及时有效的科学分析存在困难,有必要开发一种基于航天员人工月面采样作业样本辨识与分析装置。月面采样作业过程中,航天员利用工具包中携带的样本类型比对器对样本类型进行初步辨识。利用与采样工具集成的相机对样本进行拍照,并通过样品测试工具对密度、质量、硬度等物理特性进行初步测定。通过比对与质地测定两个过程,筛选有价值的样品。进一步利用采样工具对大块样本进行破碎,采集符合尺寸、质量大小要求的样本,并利用科学仪器对其化学成分等特性进行原位分析。
4.2 广域分布式原位探测
在载人登月任务中期阶段,载人登月探测技术进一步发展,搭载能力会有大幅度提高,任务周期也会大幅延长。中等规模的月面人机联合探测模式,将配备机动月球车等月面移动装备,提升航天员在月面活动范围和探测能力,采样探测工具也更多样化,航天员可在月面广域范围开展分布式原位探测任务(图12)。一方面可通过月球车等机动设备对广域多点开展表层、浅层样品采集作业,增加样品采集量,同时也提升样品的多样性;另一方面,也可在月面多个位置处布置自动化月壤剖面贯入、钻探基站,对次表层月壤机械力学特性、月表热流、月震等科学目标开展原位探测。获取月面广域的分布式探测数据,有利于对月球科学的全面认识,也能提高我国载人登月任务的科学显示度。
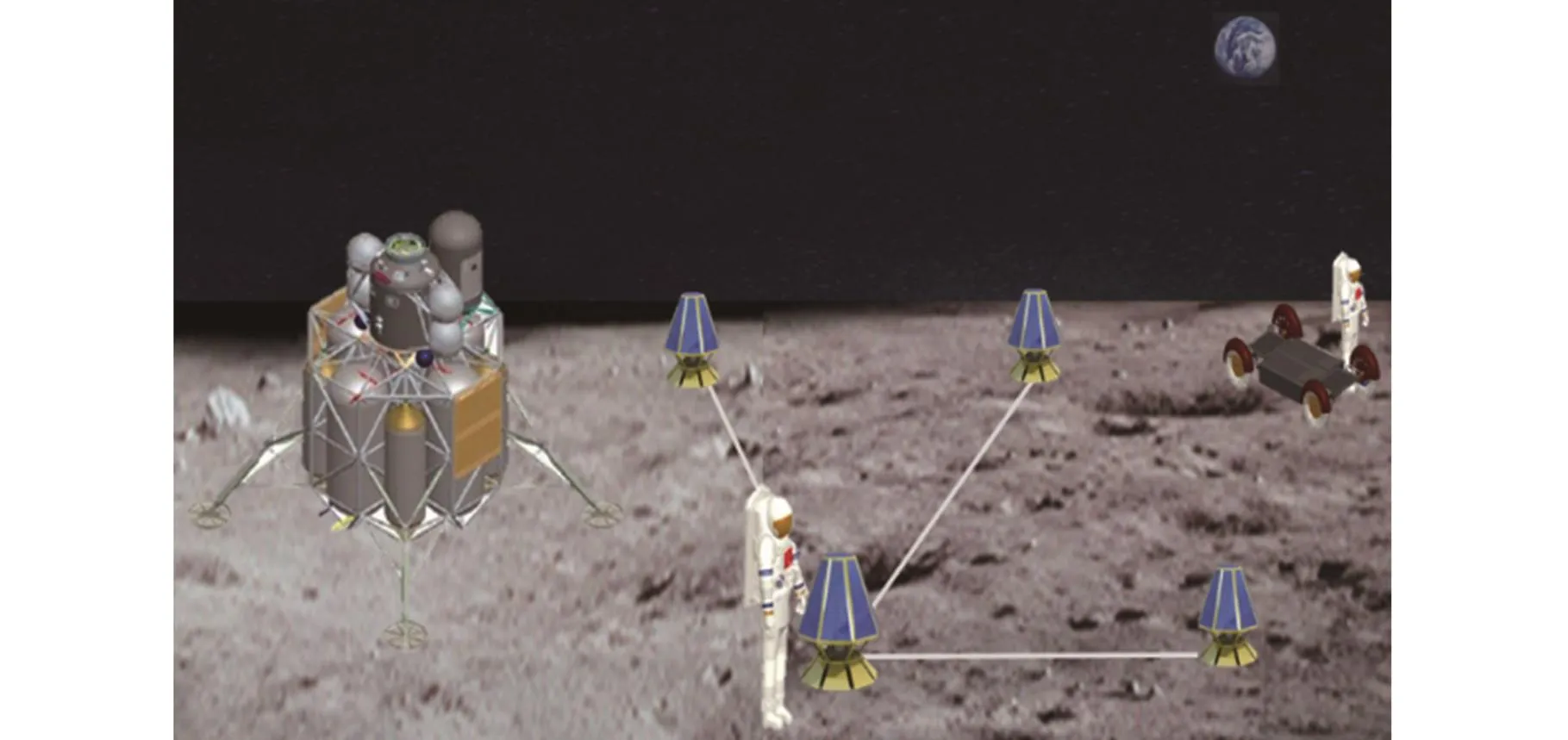
图12 月面广域分布式原位探测设想Fig.12 Concept of wide-area and distributed in-situ exploration
4.3 大尺度剖面科学钻探
在长期驻留人机联合探测阶段,将配备类型更多、功能更丰富的探测设备,具备针对月壤对象开展深入探测与原位利用的能力。遥感探测表明,月壤厚度在6~20 m左右。采用绳系式掘进、器基大尺度深孔钻等作业系统突破这层月壤,实施直达基岩的月球深钻(图13),在钻进过程中实施典型位置样品的高保真取样、钻进全程的热流分布原位探测、典型挥发分的原位探测等任务,对月球演化与生命起源科学认知及未来月球活动与资源利用具有重大的科学价值和工程意义。

图13 大尺度月壤剖面科学钻探任务设想Fig.13 Concept of scientific drilling mission for large-depth profile of lunar regolith
5 结论
1)遥感探测、采样返回和原位探测是开展月球资源探测的主要技术手段,3种手段的关联应用将会产生更大的科学效益。遥感探测的发展趋势是针对典型资源的多点探测和立体测绘;采样返回的发展趋势是实现原质原位的高保真取样与封装;原位探测的发展趋势是实现广域与纵深相结合的原位综合物性数据探测。
2)月面人机联合采样探测是载人登月工程的任务亮点。月球极地月壤剖面中水冰物质的赋存与分布特性的原位勘查将成为未来的科学亮点,开展广域与纵深相关联的采样探测任务规划,并据此开展作业工具创新研究具有重要意义。
3)针对未来载人登月采样探测任务,提出的月表样品采样探测工具包、广域分布式原位探测系统、大纵深月壤剖面科学钻探装置等任务设想,可为我国未来载人登月工程任务规划、采样探测方案论证提供参考。
