一种十字阵列模型下的新型测向算法
2019-10-26王耀金
蒋 驰,王耀金,王 昭,王 帅,徐 强
(上海无线电设备研究所,上海 201109)
0 引言
随着导引头精度和实时性的要求越来越高,适用于导引头测向的传统算法受到了严峻的挑战。经典的干涉仪测向算法[1-2]凭借着其高实时性受到了广泛的关注和应用。该算法利用2根天线之间的相位差进行测向,原理简单,计算量小,硬件可实现性强,但存在无法实时处理多目标、精度偏低等问题。为此,在测向实时性允许范围内引入阵列思想,通过空间分散排列的传感器阵列和多通道接收获取信号的时域、空域等多维信息,同时配合一系列空间谱估计算法来检测信号和提取参数,具有灵活、信号增益高、抗干扰能力强、空间分辨能力强等优点[3]。经典的空间谱估计方法主要包括多重信号分类(MUSIC)方法[4-6]、Capon算法[7-8]、信号参数估计算法(ESPRIT)[9-10]、传播算子算法(PM)[11-12]等。
传统的PM算法是利用天线阵列接收信号来构造传播算子,通过传播算子的旋转不变特性配合特征值分解来进行二维测向,其只适用于均匀分布的阵列。二维PM算法利用传播算子构造了二维空间谱函数,并通过二维方向上的谱峰搜索来测向,该算法测向精准但牺牲了单次测向时间[13-14]。
本文提出了一种正交的PM测向算法,引入了噪声子空间的投影算子构造伪谱,并采用一维谱峰搜索实现二维测向,相比二维PM算法减少了计算量,降低计算复杂度。该算法既可以多目标测向,又可以解决角度配对的问题,还可有效地估计出相同方位角(或仰角)的目标。考虑到天线阵列在空间位置上的合理排布,因此,将该算法配合使用在十字阵列中。
1 数据模型
十字型阵列的阵元结构如图1所示。由图可见,阵元均匀分布共有2M-1个。其中相邻阵元间距是d=λ/2,λ为信号波长。考虑到远场信号,信源足够远,信号到达阵列时可以认为是平行波。假设噪声与信号独立,且是加性独立同分布的高斯过程。假设有K个非相干信源,第k个信源对应的仰角和方位角分别表示为θk和φk,定义uk=sinφksinθk,vk=cosφksinθk,则X轴上M个阵元接收的信号可表示为
Xx(t)=AxS(t)+Nx(t)
(1)
式中:Ax=[ax(v1),ax(v2),…,ax(vK)],ax(vk)=[ejπ(M-1)dvk/λ,…,ej2πdvk/λ,1,e-j2πdvk/λ,…,e-jπ(M-1)dvk/λ]T,其中[·]T表示转置;Nx(t)为X轴上子阵的加性高斯白噪声;S(t)∈CK×1为信源矢量。
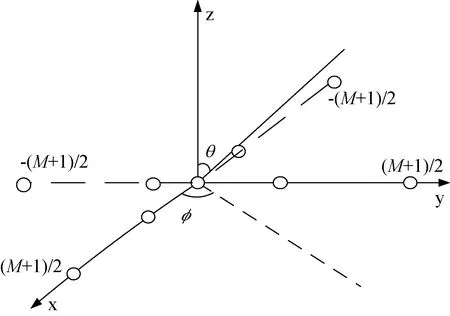
图1 十字阵列的阵元结构Fig.1 Structure of the cross array
类似地,Y轴上M个阵元接收的信号可表示为
Xy(t)=AyS(t)+Ny(t)
(2)
其中:Ay=[ay(u1),ay(u2),…,ay(uK)],且ay(uk)=[ejπ(M-1)duk/λ,…,ej2πduk/λ,1,e-j2πduk/λ,…,e-jπ(M-1)duk/λ]T;Ay为Vandermonde矩阵;Ny(t)为Y轴上子阵的加性高斯白噪声。
十字阵列的接收信号可表示为
(3)
2 正交PM测向算法

(4)
构造的矩阵
(5)

(6)
根据定义构造伪空间谱函数为
(7)

(8)

(9)
(10)
测向算法的具体步骤为:


测向算法具有以下特点:一是可实现多目标的测向,并且实现二维角度的自动配对;二是一维搜索只需做2次,避免了二维搜索庞大的计算量;三是由于搜索的直接对象是u和v,因此可有效估计出相同方位角(或仰角)的目标。
3 仿真验证
3.1 可行性仿真
3.1.1 多目标源测向
图2是该算法估计2个不同目标源的结果。由图可见,M=9,L=200,2个不同目标的仰角和方位角分别为(5°,30°)和(15°,10°)。

图2 多目标源测向散布图Fig.2 Multi-target signal sources estimation
3.1.2 具有某一相同维度角目标的多目标源测向
图3是该算法估计出相同仰角(或方位角)的目标源,其中M=9,L=200。因为该算法是估计出(θk,φk)的综合信息uk和vk,所以即使θk或φk相同,本文算法依然能有效工作。

图3 同仰角或方位角的目标源测向散布图Fig.3 Estimation of signal sources at the same elevation or azimuth
3.2 性能仿真
为了直观地反映出所提算法在不同参量下的性能,引入角度的求根均方误差(root mean square error,RMSE),并定义为
(9)
式中:T为仿真次数;ωkq是在第q次仿真中,第k个信源仰角(或方位角)的估计值;K是信源个数(K=2);ωk是仰角(或方位角)的精确值。定义快拍数为L,阵元数为2M-1。
3.2.1 不同快拍数下测向性能
图4针对不同快拍数下测向进行了仿真,图中SNR表示信噪比(下同)。因为采样数据随着快拍数的增加而增加,从而得到更加精确的协方差矩阵,因此得到的测向性能越好。
3.2.2 不同阵元数下测向性能
图5仿真出了不同阵元数下的测向性能。由图可见:算法的性能随阵元数的增加而提高。其原因是阵元数的增加会使分集增益增加。
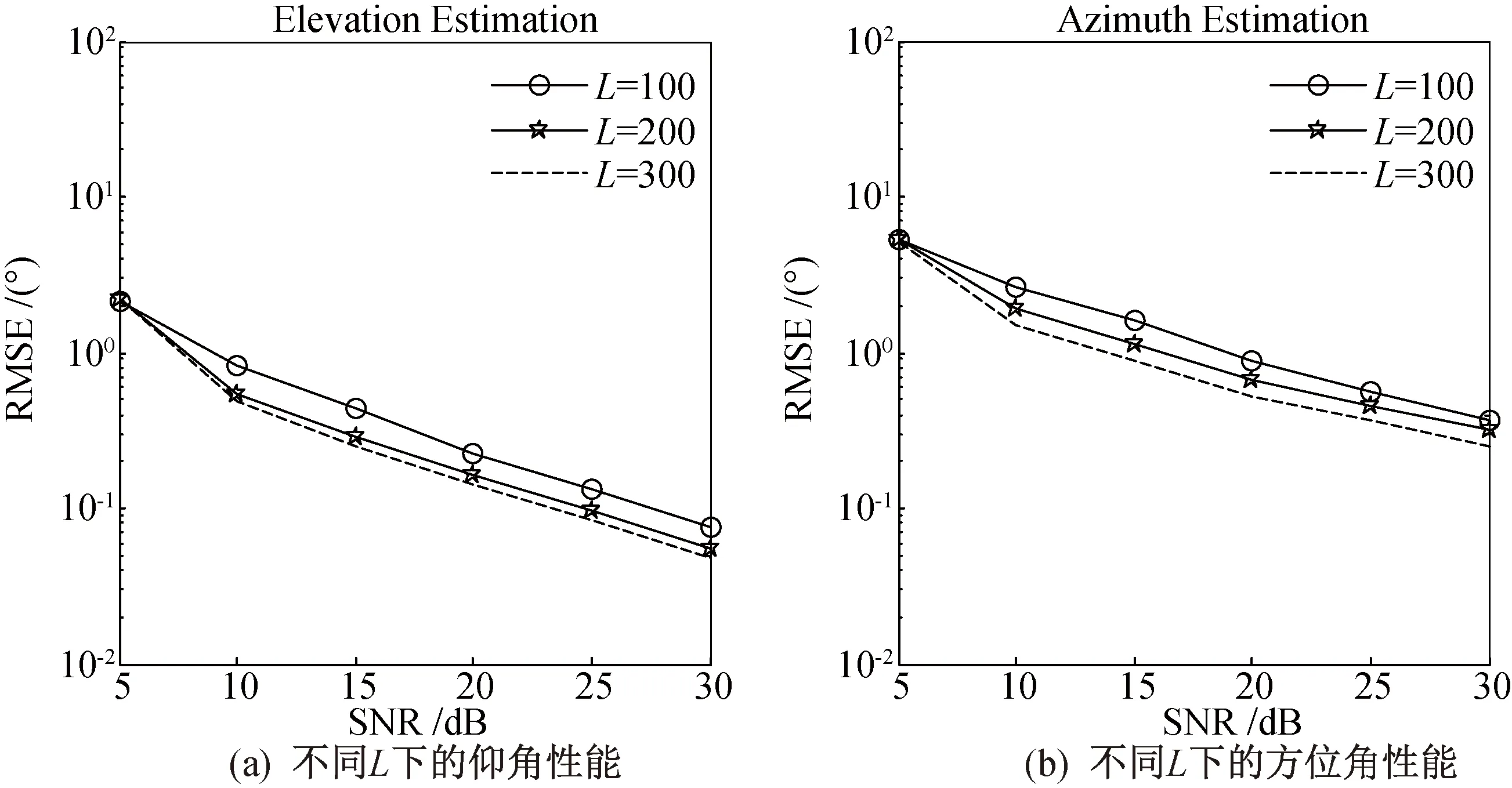
图4 不同L下的测向性能(M=9)Fig.4 Angle estimation performance with different L(M=9)
3.2.3 不同算法的计算复杂度
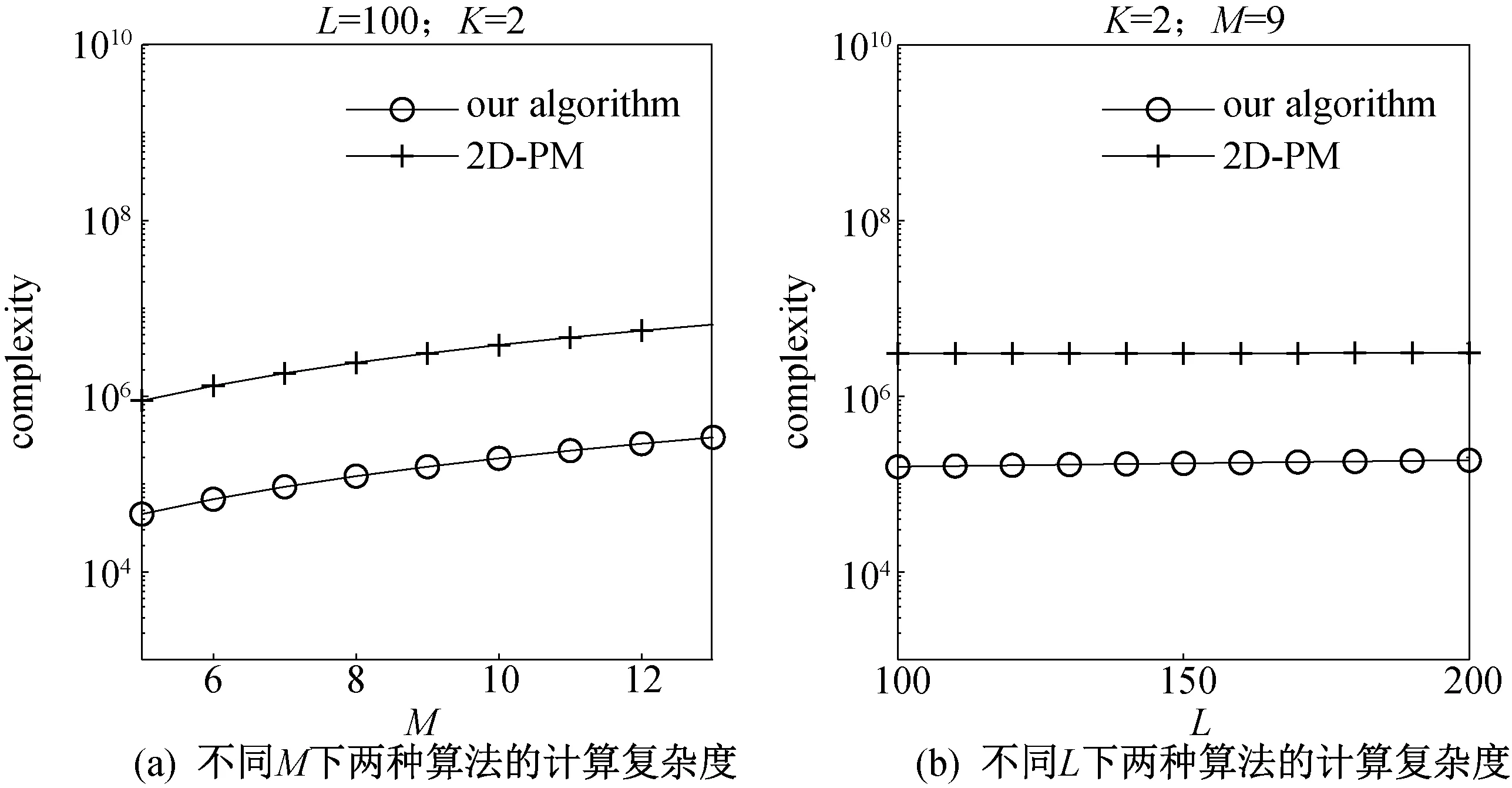
图6 不同算法的计算复杂度Fig.6 Computational complexity of different algorithms
图6仿真出了不同算法的计算复杂度。由图可见,本文算法的计算复杂度大大低于二维PM算法的计算复杂度。
3.2.4 不同算法的测向性能
图7对比了不同算法的测向性能。由图可见,本文算法的测向性能接近于二维PM算法的测向性能。

图7 不同算法的测向性能Fig.7 Angle estimation performance of different algorithms
4 结束语
本文基于十字型阵列模型提出了一种新型正交PM的空间谱测向算法。该算法引入了噪声子空间的投影算子构造伪谱,并采用一维谱峰搜索来实现二维测向。与利用二维谱峰搜索测向的二维PM算法相比,该算法大大减少了计算量,降低了计算复杂度;与利用传播算子的旋转不变特性测向的传统PM算法相比,该算法对阵列排布的要求更低。同时,该算法可实现多目标信号的测向,解决了二维角度的配对问题,也可有效估计出相同方位角(或仰角)的目标。由于该算法计算量较小,十字阵在实际应用中所占空间少,因此可广泛应用在雷达、导引头等工程测向技术中。
随着电子侦察、电子对抗的飞速发展,雷达和导引头的测向要求越来越高。本文所提算法就多目标精准测向的能力完全依赖于庞大的阵列数,且该算法尚不具备相干信号源的测向功能。因此,后续可以就如何在复杂电磁环境下实现更加轻量化、快速化、精准化测向开展持续研究。