一种新型摩擦摆支座在单层球面网壳结构中的隔震控制效应
2019-08-2723
23
(1.北京建筑大学土木与交通工程学院, 北京100044;2.北京建筑大学北京未来城市设计高精尖创新中心, 北京100044;3.北京建筑大学工程结构与新材料北京高等学校工程研究中心, 北京100044)
0 引言
理论和实验研究表明,振动控制技术通过隔离和耗散地震能量,可以有效提高建筑结构的抗震性能。常用的被动控制装置,如隔震支座、阻尼器和耗能支撑,已经开始被引入到大跨网壳结构的抗震研究中[1-2]。摩擦摆支座(friction pendulum bearing,FPB)是一种典型的滑动隔震装置[3-4],该隔震支座已成功应用于建筑结构和桥梁结构的基础隔震和高位隔震,并越来越为各国工程设计人员所接受。近年来,科研人员开始关注FPB在空间网壳结构中的隔震减振性能,并取得了一些研究进展[5-9]。已有的研究表明,使用FPB可以有效降低受控网壳结构的地震响应。然而,空间网壳结构在振动过程中的受力较为复杂,可能对FPB产生竖向拉拔作用,对此,一些研究人员提出了抗拉型FPB装置以克服这一难题[10]。除此之外,多维强震下网壳底部FPB隔震系统的限位保护也是一个棘手的问题。然而,当前这一问题尚未引起足够的关注,相关的研究较为滞后。
在过去的20年里,各种智能材料在土木工程振动控制领域发展迅猛,其中,形状记忆合金(shape memory alloy,SMA)展现出良好的应用潜力,已经受到了多国专家的重视。迄今为止,多高层建筑结构和桥梁结构基于SMA的减隔震控制已经开展了广泛而深入的研究[11-13],研究中所涉及的控制装置包括SMA-橡胶支座、SMA-平面滑动支座、SMA阻尼器。然而,如何使用SMA部件改善FPB隔震大跨网壳结构的抗震性能,目前尚未得到研究。
本文提出了一种带有SMA拉索的新型FPB支座(superelasticity-friction pendulum bearing,S-FPB),并分析了其在球面网壳结构中的抗震及减震性能。S-FPB由FPB以及竖向布置在其内部滑块周围的超弹性SMA拉索组成,用以克服目前大跨网壳结构高位FPB隔震系统抗拉和限位的问题。本文首先阐明了S-FPB的详细构造与理论模型。随后,建立了该新型隔震支座的精细化有限元模型,通过数值模拟考察了隔震装置的滞回性能。最后,将S-FPB用于单层球面网壳结构的高位隔震,研究分析了受控与无控球面网壳结构在地震作用下的动力响应特征以及S-FPB隔震系统的减震效应。
1 S-FPB的构造和工作原理
FPB由顶板、内部滑块和底板组成,其示意图如图1所示。将SMA拉索沿竖向均匀布置在FPB的顶、底板之间,形成S-FPB隔震支座。起到限位复位作用的SMA拉索由超弹性SMA丝组成,垂直布置在隔震支座内部滑动的周边,并采用铰接节点连接于顶板和底板之间,如图2所示。在竖向均匀布置SMA拉索限位器的优势是保证隔震装置的力学性能在各个方向上保持相同。S-FPB可布置在上部结构和下部结构之间,在地震作用下,上部结构和下部结构发生相对水平位移时,S-FPB的内部滑块开始沿着球形滑动面滑动,与此同时,竖向SMA拉索逐渐拉伸。在此过程中,基于SMA材料的超弹性特性,SMA拉索限位器为隔震装置提供了附加的水平刚度、抗拉拔力、耗能能力以及限位能力,并增加了隔震系统的抗震冗余度。总体而言,通过引入上述控制装置,S-FPB较原始的FPB在功能多样性和鲁棒性方面均得到了改善。
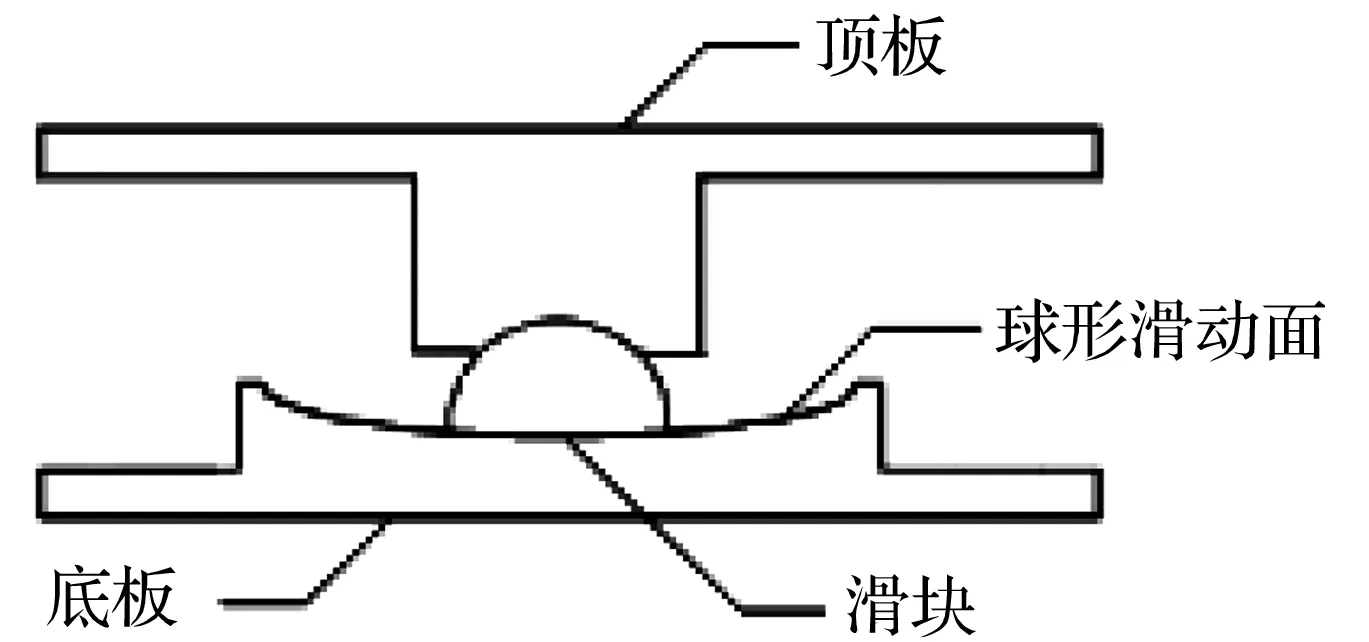
图1 FPB示意图
Fig.1 Schematic diagram of FPB

图2 S-FPB示意图
Fig.2 Schematic diagram of S-FPB
2 S-FPB的隔震耗能机理
2.1 支座力—位移关系
忽略滑块惯性力和支座高度的微小影响,FPB沿水平方向的水平力—位移关系可以表示为:
(1)

假设SMA拉索中SMA丝的初始长度设为L0,在支座运动过程中SMA丝产生了拉伸,其长度的增量ΔL可表示为:
(2)
式中:δd是FPB的竖向位移,可以由如下的公式得到:
(3)
当隔震支座产生水平位移u时,单根SMA丝产生的拉应变可以表示为:
(4)
Graesser等建立的宏观唯象模型[14]是一种应用较为广泛的SMA本构模型,本文采用该模型描述SMA的超弹性力学特性。Graesser本构模型的表达式为:
(5)
(6)
式中:σ和ε分别为SMA的一维应力和应变;β为一维背应力;E为弹性模量;Y为诱发马氏体相变的应力;α、fT、n和c均为材料常数,它们影响SMA滞回曲线的形状;erf(x)和[λ(x)]分别表示误差函数和单位阶跃函数,其表达式为:
(7)

(8)
SMA拉索提供的轴向控制力可表示为:
(9)
式中,FSMA为SMA拉索提供的合力;σi和Ai是组成SMA拉索的第i根SMA丝的正应力和横截面积。
引入FPB和SMA拉索二者提供的控制力后,S-FPB总体控制力的水平分力可以表示为:
FSh=FI+FSMAsinθ,
(10)
式中:FSh为S-FPB的水平恢复力;θ为隔震支座工作过程中SMA拉索限位器轴线与竖向轴线之间的夹角。S-FPB总体控制力的垂直分量如下式所示:
FSv=FSMAcosθ,
(11)
式中:FSv是S-FPB恢复力的竖直分量。由此可见,S-FPB在水平方向和竖直方向均可提供控制力,有利于受控结构在多个方向的减震控制。
2.2 S-FPB的滞回响应分析
设计用于有限元模拟的S-FPB试件,其主要尺寸如图3所示。球面滑动支座的顶板、底板、滑块均由Q345钢制成,钢材的弹性模量为2.05×105N/mm2,泊松比为0.3。球面的滑动摩擦系数为0.1。采用直径为1 mm的NiTi -SMA(Ni的原子百分比为51 %,Ti为49 %)丝制成SMA拉索。根据单根SMA丝试样的拉伸试验[15],通过数据拟合确定了Graesser模型的性能参数取值,如表1所示。在支座中共布置了2个SMA拉索,单个SMA拉索由120根SMA丝组成。考虑SMA丝的合理工作范围,取拉索的轴向变形设计值为10 mm。根据SMA合金丝的数量,可确定单个SMA拉索的轴向力—位移特性。另外,将上述S-FPB试件卸除SMA拉索,形成FPB试件,以便与S-FPB试件的性能进行对比分析。
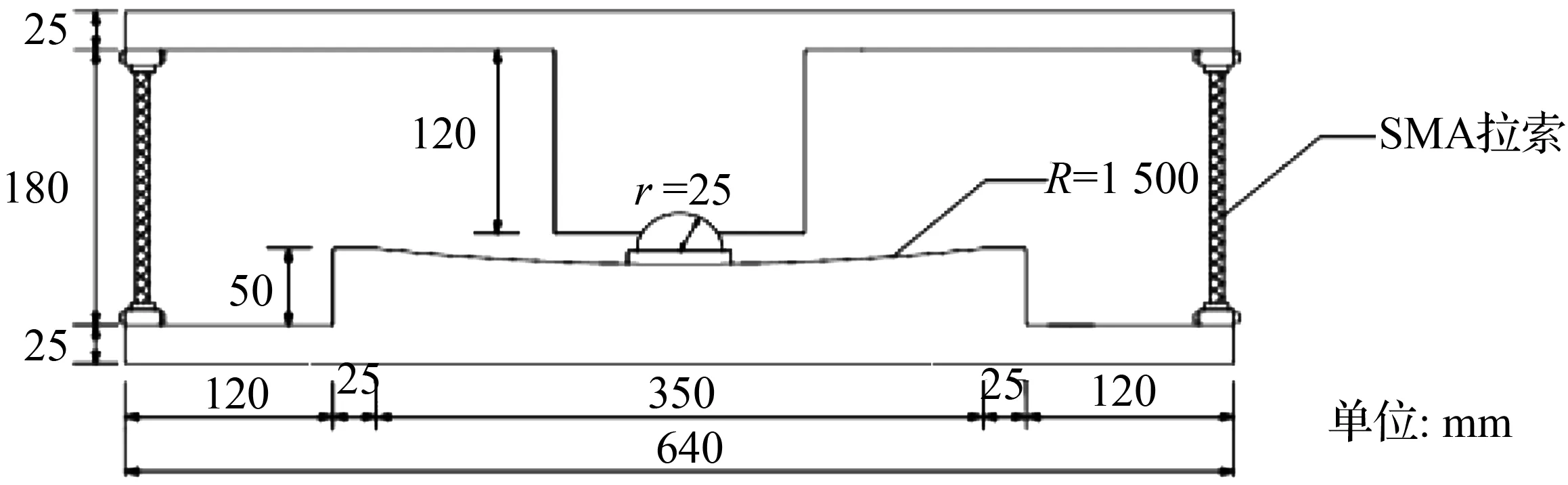
图3 S-FPB试件尺寸Fig.3 Dimensions of S-FPB specimen

弹性模量E/(N·mm-2)马氏体相变应力Y/(N·mm-2)材料常数αfTcan4.273×1044800.090.180.0012459
基于上述隔震支座试件的设计方案,采用通用有限元软件ABAQUS进行数值模拟。采用C3D8R单元模拟隔震支座的钢部件。假定滑块和滑动面之间的接触面的法向作用为硬接触,切向摩擦力遵循库伦定律。在顶板外表面的形心上设置参考点,同时固定底板的下表面。在参考点上施加三角位移荷载。为提高计算效率,采用1/2的有限元模型。利用轴向连接器单元(axial connector element)模拟SMA拉索的滞回响应。参考Cardone等推荐的建模方法[16],将轴向连接器单元提供的非线性弹性模型和滞回模型进行叠加,以模拟基于Graesser模型的旗帜形滞回曲线。图4为建立SMA拉索模型所用的非线性弹性模型和滞回模型示意图,其中,xa、xb、Fa、Fb和Ks分别为非线性弹性模型的屈服位移、设计位移、屈服力、设计力和屈服后刚度,Fy为滞回模型的屈服力。同时,注意到xa、xb和Ks分别是根据SMA拉索滞回曲线得到的屈服位移、设计位移和屈服后刚度。此外,参数Fa和Fb满足以下关系式:
(12)
式中:FT和FU分别是SMA拉索的屈服力和设计力。经上述过程,确定了用于定义轴向连接器参数的取值,如表2所示。图5和图6分别为FPB试件和S-FPB试件的有限元模型。

(a) 非线性弹性模型 (b) 滞回模型

非线性弹性模型屈服力Fa/kN非线性弹性模型屈服位移xa/mm非线性弹性模型设计力Fb/kN非线性弹性模型设计位移xb/mm滞回模型屈服力Fy/kN32.01.051.012.014.0
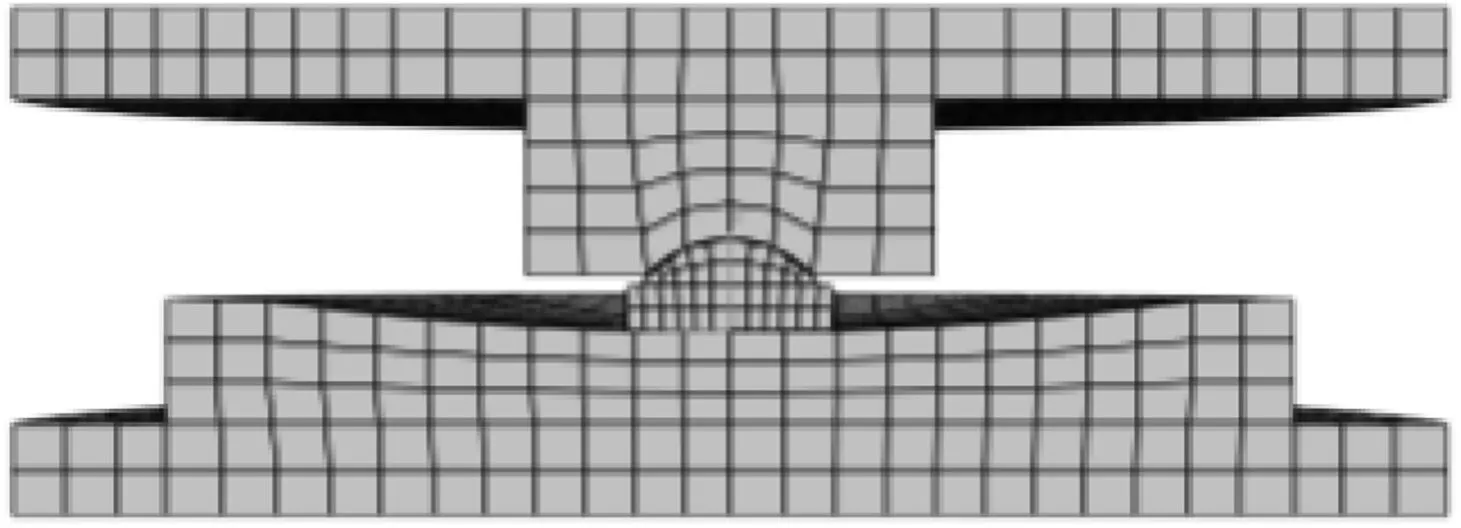
图5 FPB试件的有限元模型
Fig.5 FE model of FPB specimen
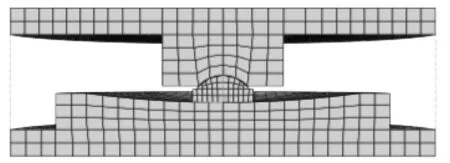
图6 S-FPB试件的有限元模型
Fig.6 FE model of S-PFB specimen
在ABAQUS中设置了三个分析步来模拟隔震支座的非线性行为。第一步设定初始条件,第二步在顶板上施加法向力,第三步施加三角波位移荷载,进行两个位移加载工况,其位移幅值分别为120 mm和150 mm,加载频率为0.1 Hz。为进行比较研究,基于FPB和S-FPB的理论模型,编制了MATLAB程序来描述此两类隔震支座的力学响应。FPB和S-FPB试件在不同位移幅值下的滞回曲线分别如图7和图8所示。从图中可以看出,FPB试件的力—位移曲线是典型的双线性滞回环。在相同位移幅值下,依靠SMA拉索的作用,S-FPB试件较FPB试件具有更大的水平刚度和更为饱满的封闭滞回环。
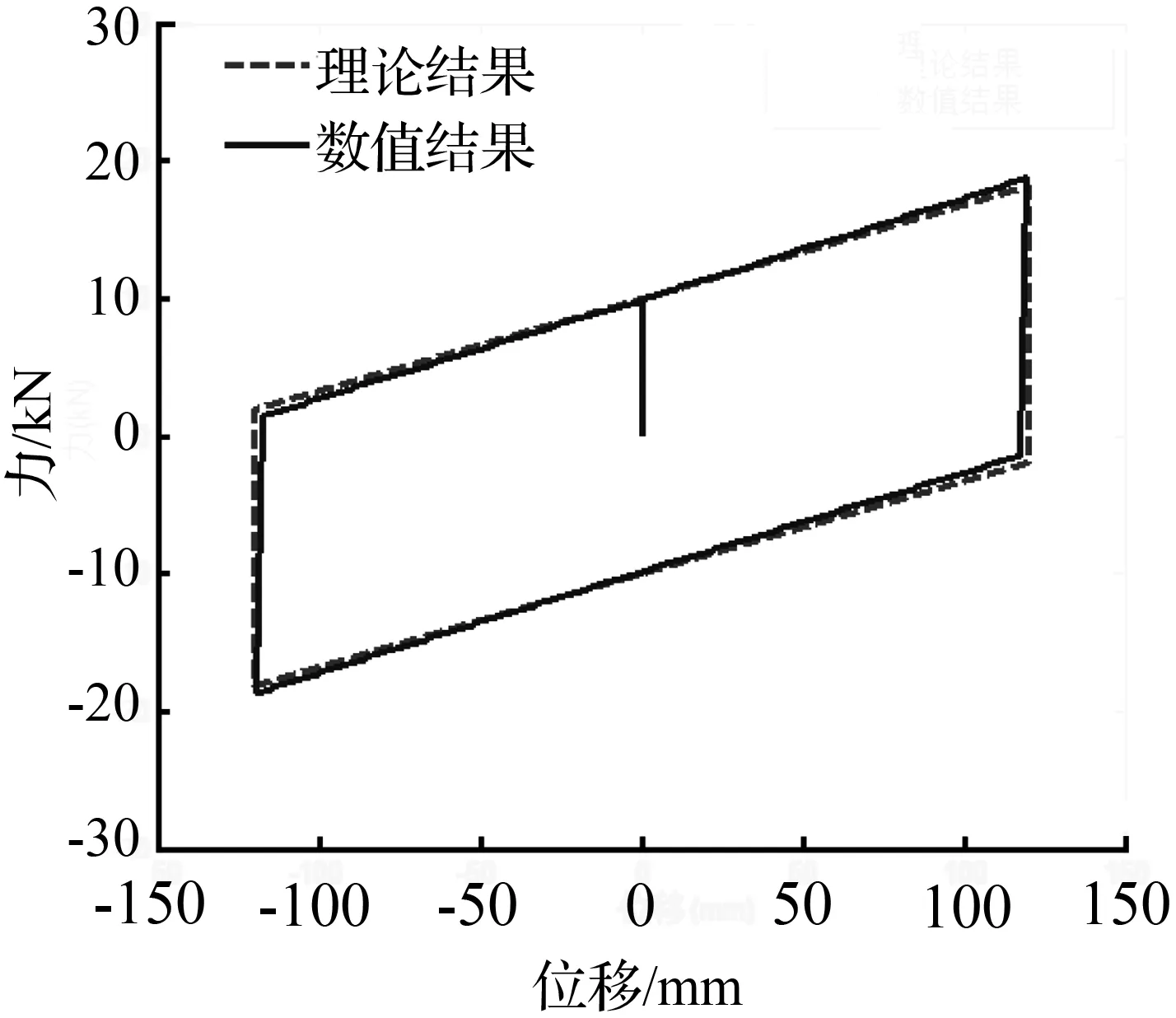
(a) D=120 mm

(b) D=150 mm
图7 FPB试件的滞回曲线
Fig.7 Hysteresis curves of FPB specimen
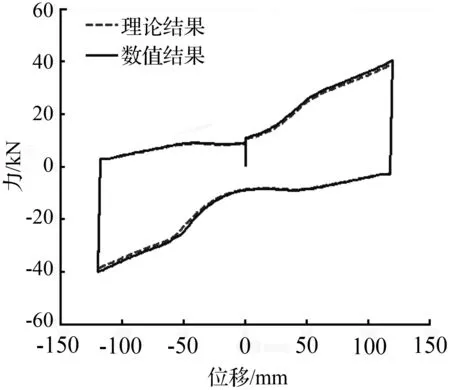
(a) D=120 mm
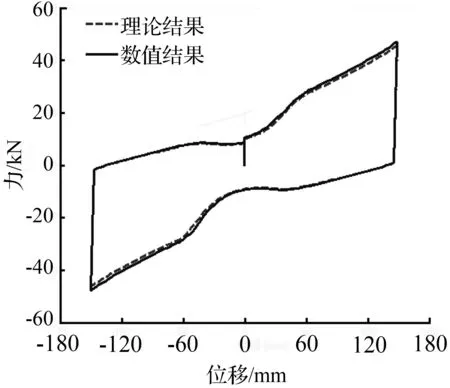
(b) D=150 mm
图8 S-FPB试件的滞回曲线
Fig.8 Hysteresis curves of S-FPB specimen
3 单层球面网壳结构模型
3.1 结构体系
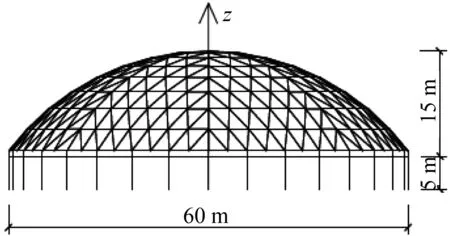
图9 K8型单层球面网壳结构Fig.9 K8 single-layer spherical lattice shell structure
本文研究的空间结构由K8型单层球面网壳屋盖(即含有8个扇形面的凯威特型单层球面网壳)及其下部结构组成。网壳屋盖参数如下:跨度60 m,矢跨比1/4,支承柱的高度为5 m。结构主要尺寸如图9所示。网壳屋盖采用了φ133×6、φ273×10和φ351×10三种规格的钢管。下部结构包括环梁和支承柱,环梁的截面规格为 φ377×10,支承柱的截面规格为φ480×12。假定屋面荷载为1 kN/m2,将其施加到网壳的节点上。屋盖和下部结构均采用Q345钢材。网壳屋盖与下部支撑柱相连,在支撑柱顶部布置32个隔震支座(每个柱子顶部都设有一个支座),形成高位隔震体系。S-FPB滑动面的曲率半径为1.5 m,滑动面的摩擦系数为0.1,顶板与底板之间的净高度为180 mm,支座的水平位移容量为±230 mm。SMA拉索共含有360根直径为1 mm的NiTi记忆合金丝,其力学性能及变形能力与上文中用于S-FPB有限元模拟的SMA丝相同。为比较和评估S-FPB的控制效果和抗震性能,将具有相同的曲率半径和摩擦系数的S-FPB和FPB分别应用于网壳结构的高位隔震。综上,本研究分析了三种网壳结构模型:①无控结构模型(S-1模型);②采用FPB隔震系统的受控结构模型(S-2模型);③采用S-FPB隔震系统的受控结构模型(S-3模型)。
3.2 结构建模
使用ABAQUS建立了整体结构的有限元模型,如图10所示。梁单元B32用以模拟上部网壳屋盖和下部结构的梁柱构件。屋面荷载由节点质量模拟。该结构所有的钢构件均采用双线性本构模型,满足Von-Mises屈服准则。根据文献[17]建议的建模方法,使用解析刚体定义S-FPB的球形滑动面,同时内部滑块被定义为附属于上部结构梁单元的从属节点。使用硬接触和罚函数来分别定义在滑块节点和刚性滑动面之间法向和切向作用。此外,通过轴向连接器单元模拟SMA限位器,将该连接单元的两端分别与网壳屋盖底部支座节点和下部支承柱的顶部节点相连,如图11所示。表3给出了网壳分析模型中轴向连接单元的参数取值。进而,利用接触连接和耦合关系,将网壳屋盖结构、高位隔震系统和下部结构连接起来,形成结构整体有限元模型。
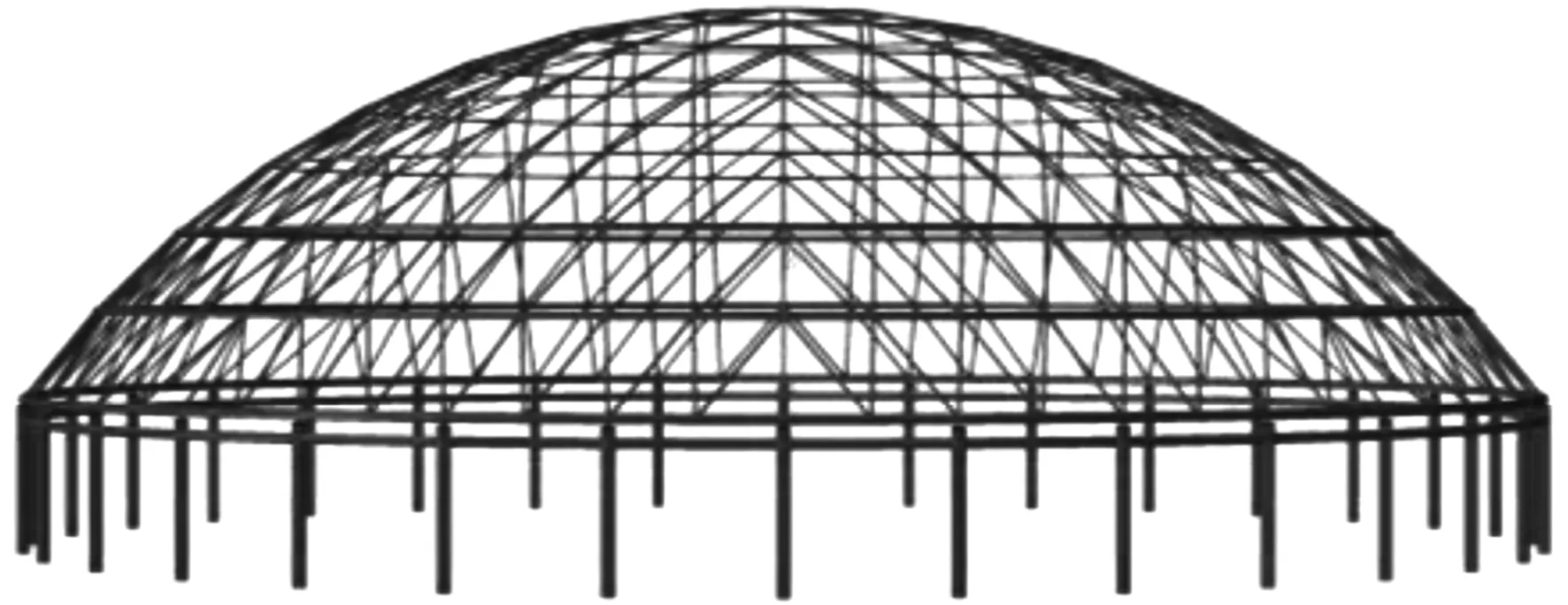
图10 网壳结构的有限元模型
Fig.10 FE model of lattice shell structure
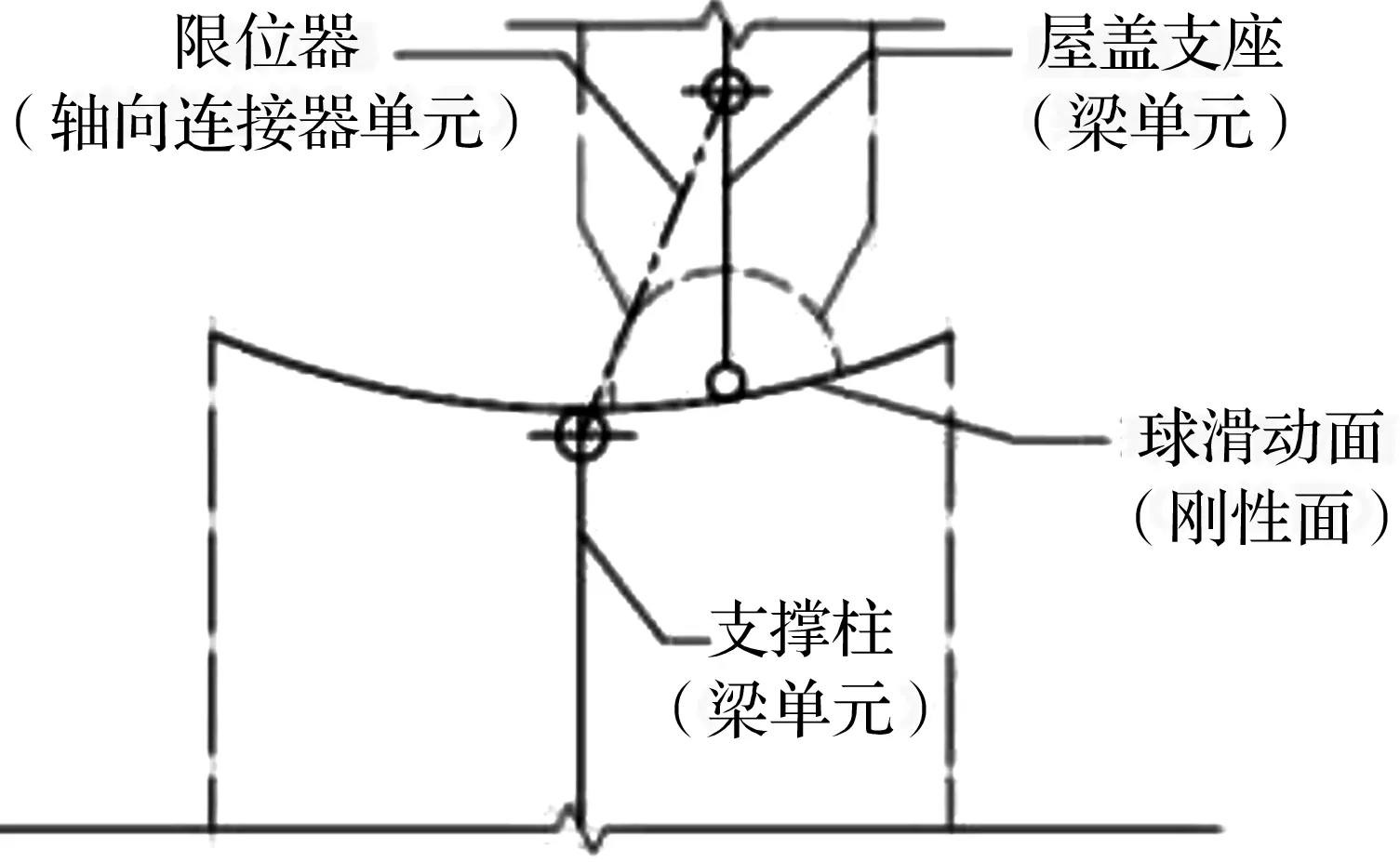
图11 隔震装置建模示意图
Fig.11 Schematic diagram of modeling of isolator

表3 轴向连接器单元的参数值Tab.3 Numerical values of parameters for axial connector element
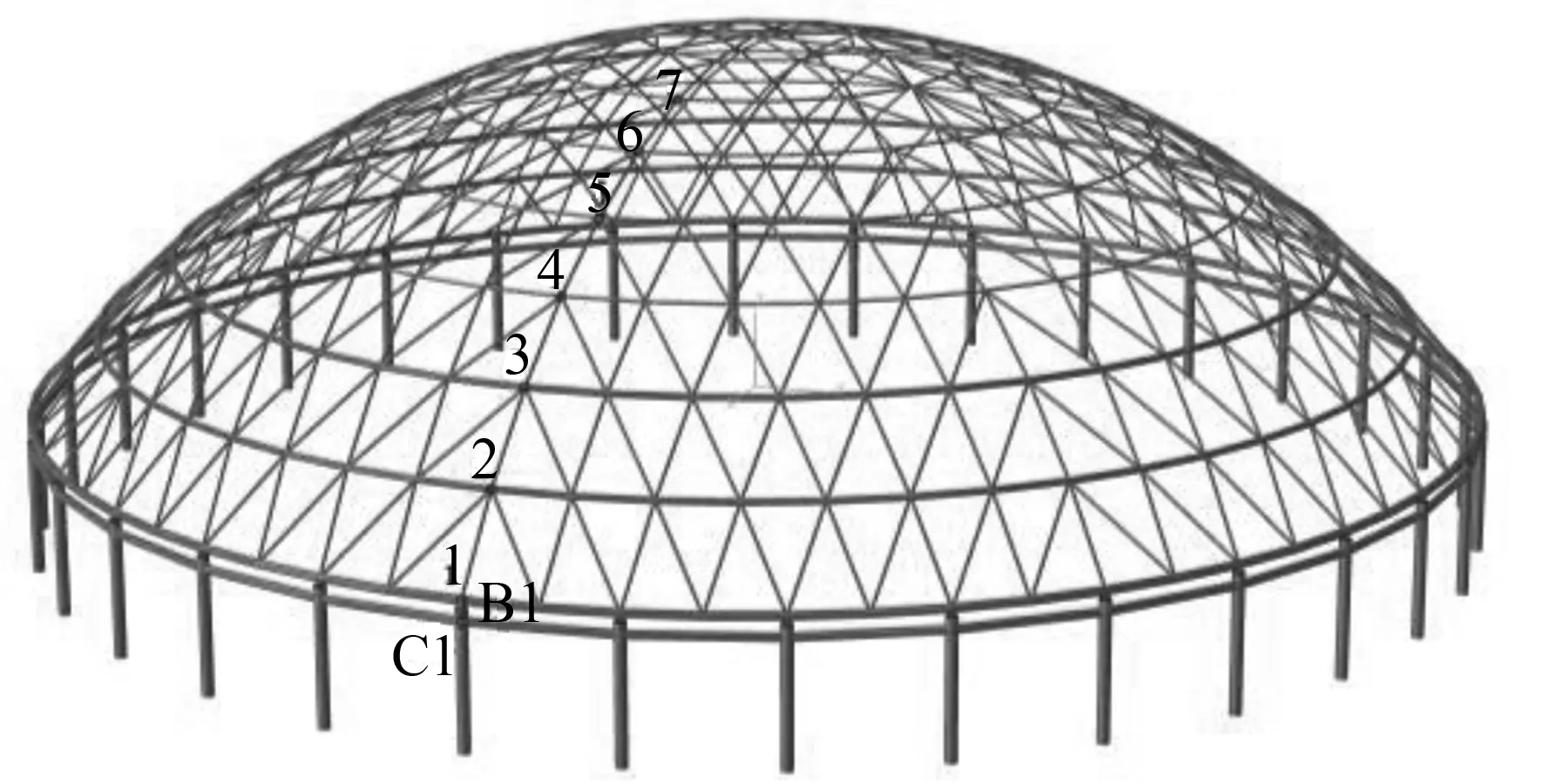
图12 监测节点和隔震装置Fig.12 Selected nodes and isolator
3.3 非线性时程分析
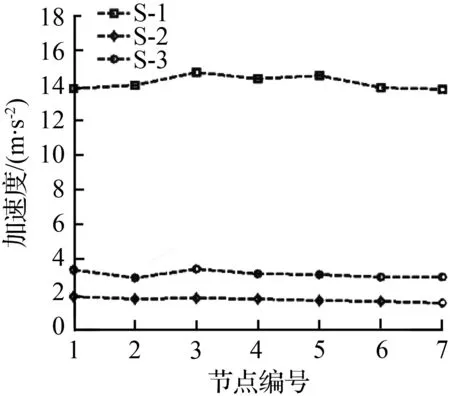
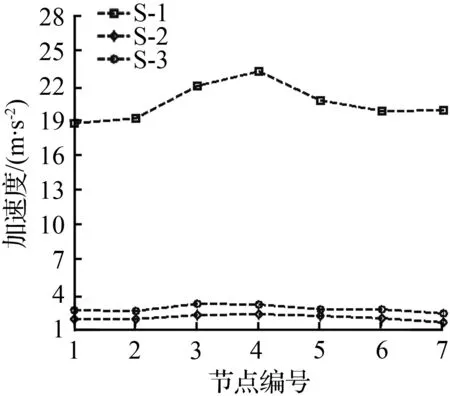
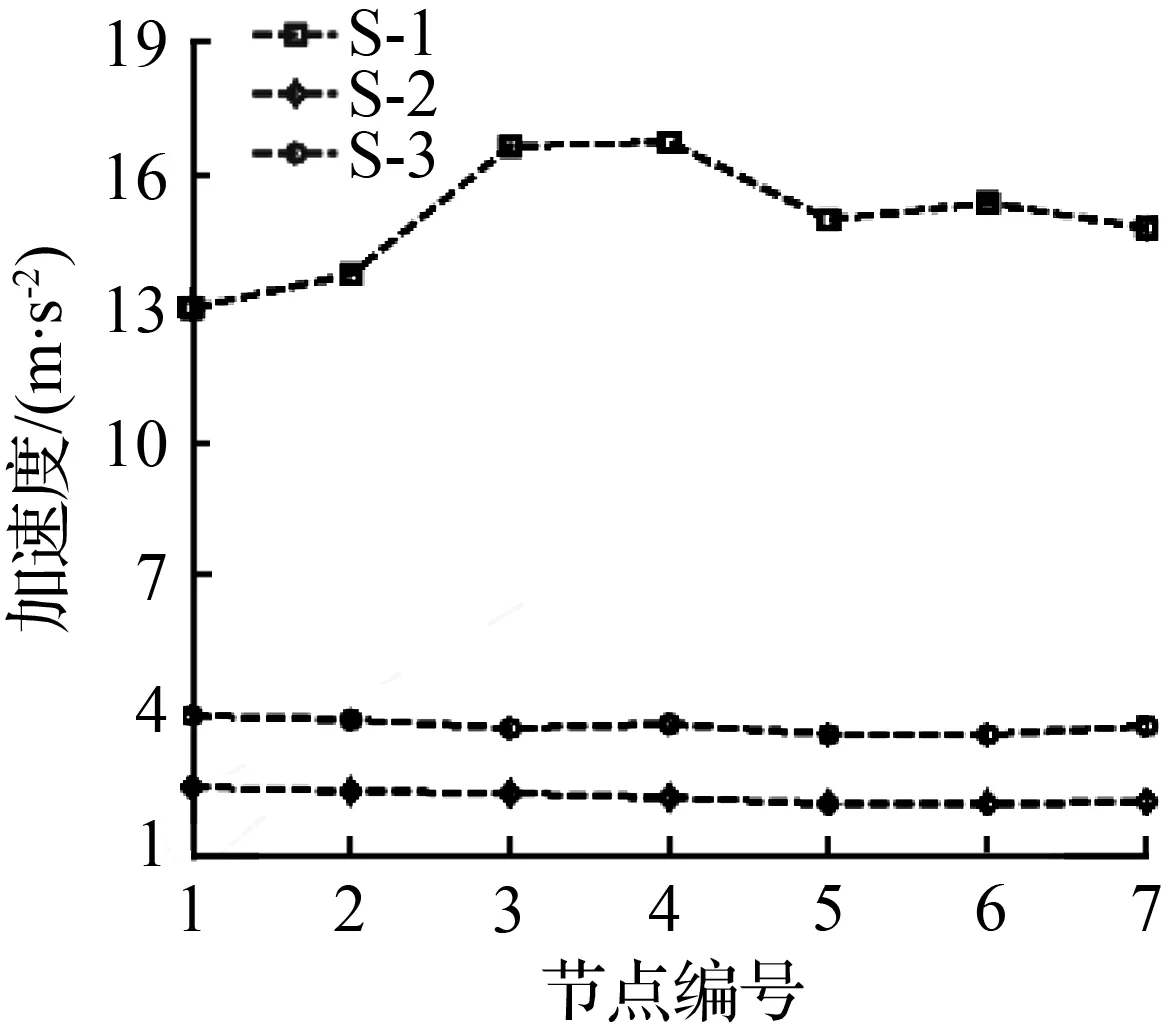
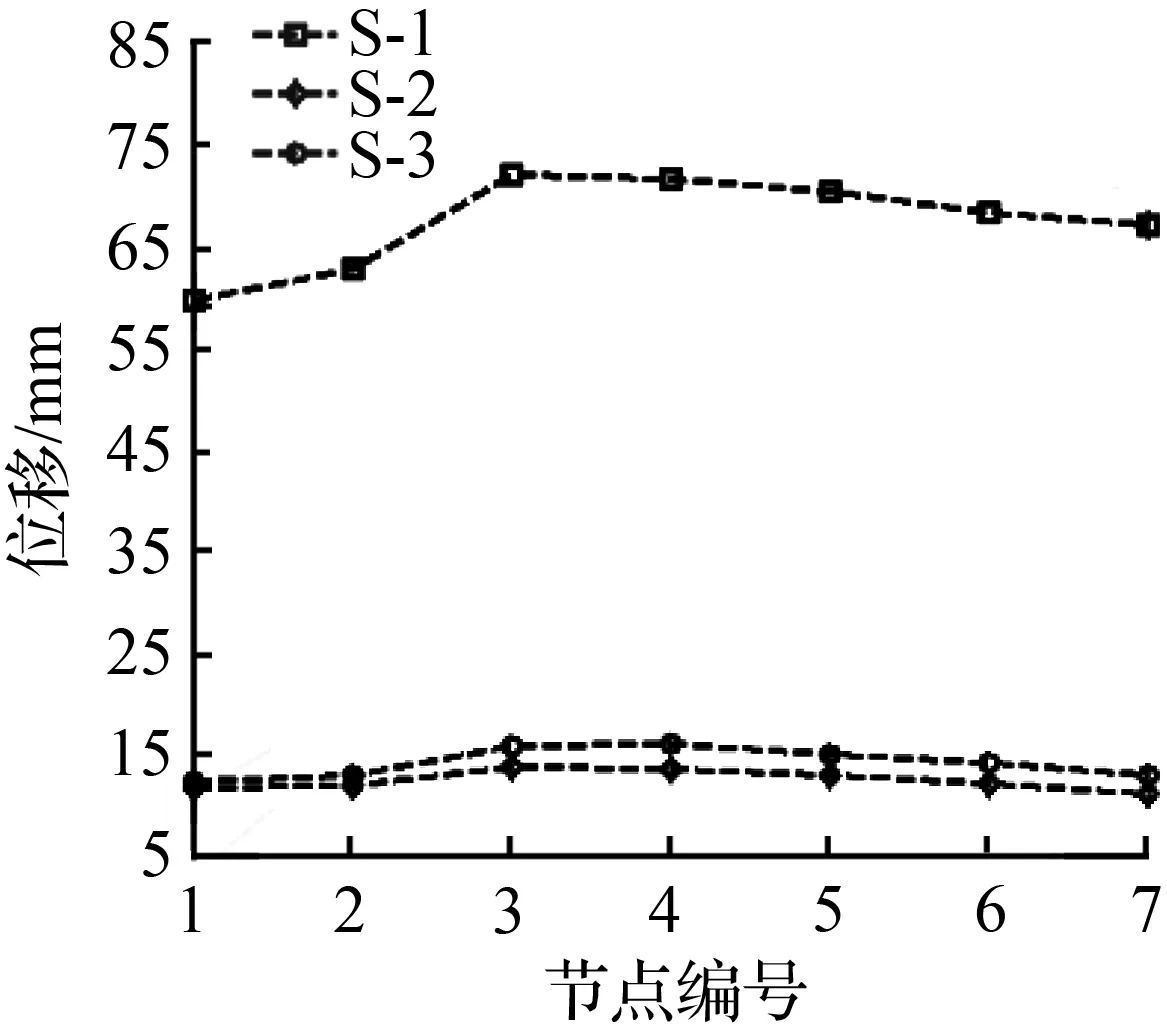
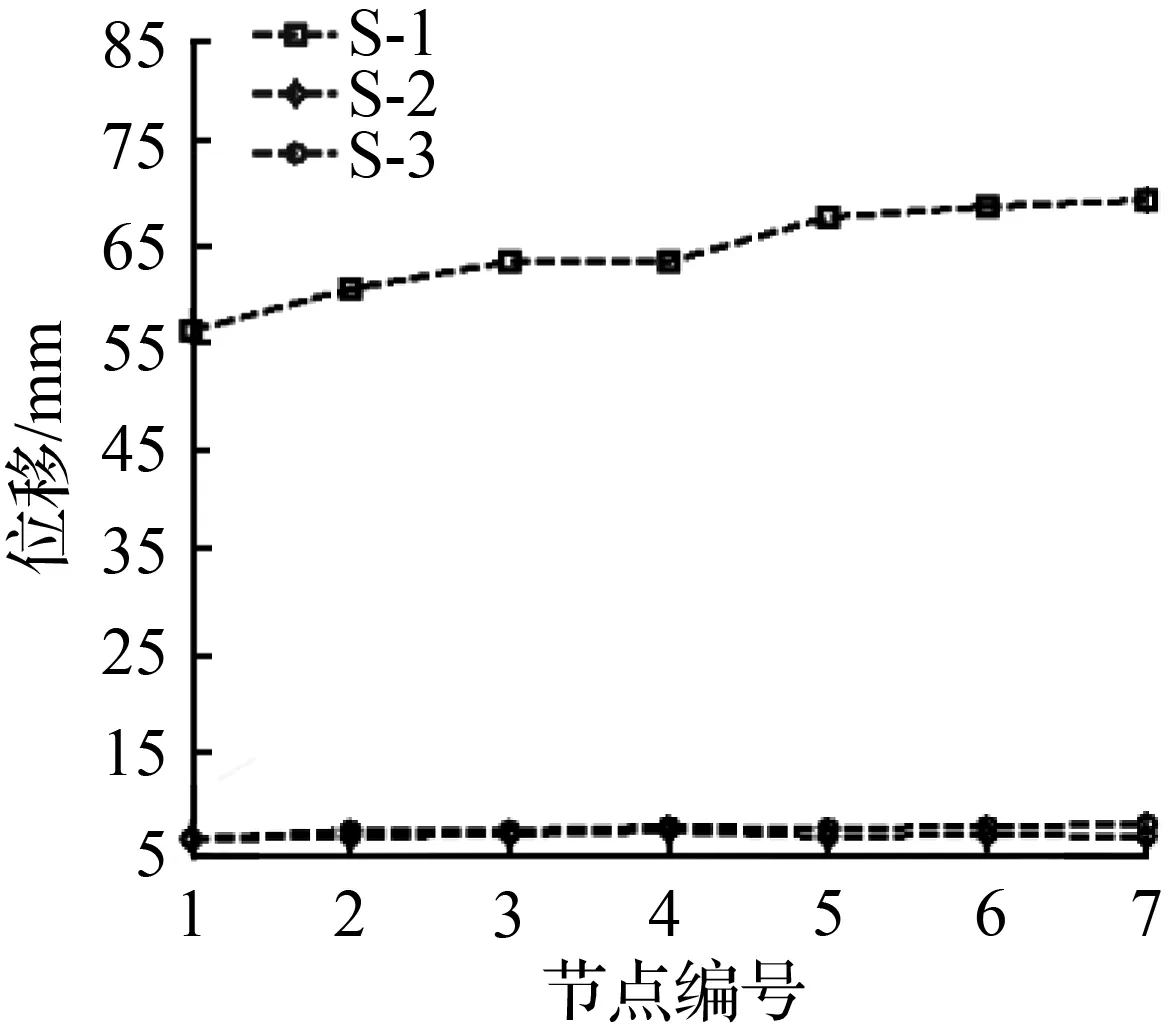
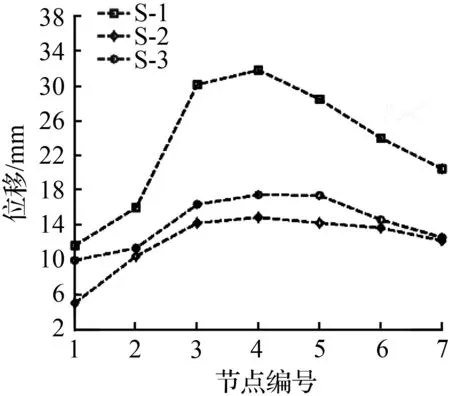
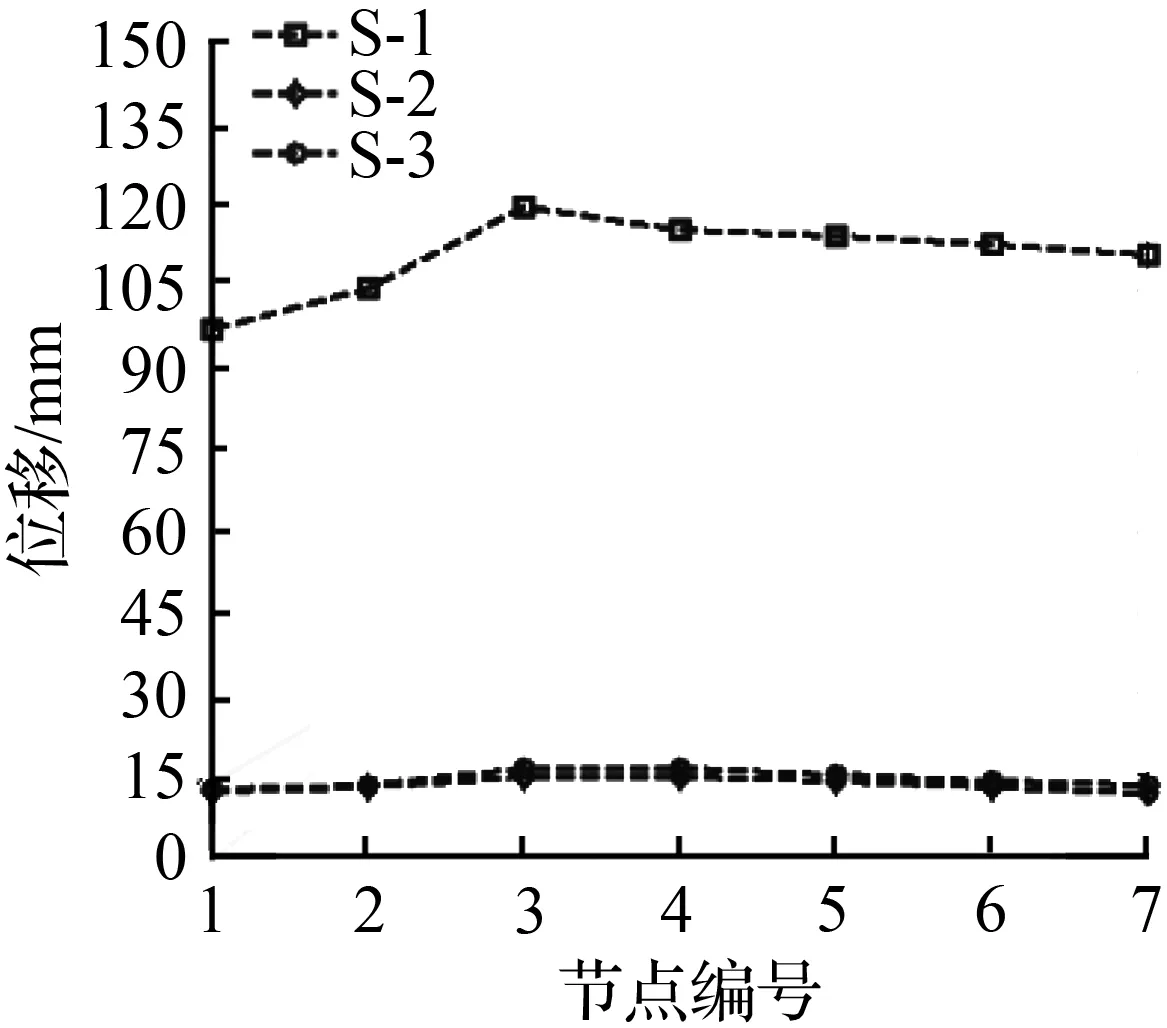
采用Hilber-Hughes-Taylor方法进行非线性时程分析,并考虑重力荷载作用下的初始内力和变形。选取El-Centro波、Taft波、Loma Prieta波和Sylmar波的EW、NS和UD分量,同时沿x、y和z三个方向进行地震输入,峰值加速度取0.4g。在三个方向的加速度的比值满足ax∶ay∶az=1∶0.85∶0.65。在结构中选取了一些监测节点用于动力响应评价,如图12所示,包括网壳屋盖节点(节点1~7)、隔震装置(节点B1)和柱顶节点(节点C1)。定义了减震率以评价控制效果:减震率η=(无控结构地震响应峰值-受控结构地震响应峰值)/无控结构地震响应峰值× 100 %。
4 结构地震响应
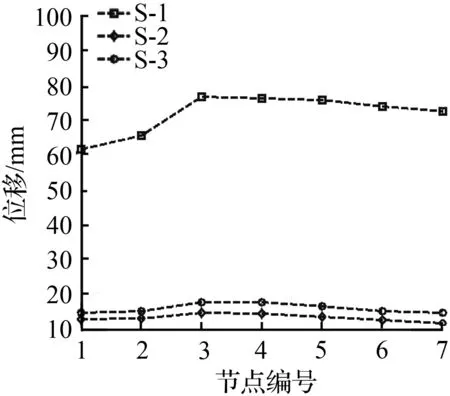
图13~ 16给出了网壳屋盖中监测节点在水平和竖向的加速度响应峰值分布,表4给出了节点加速度减震率,可见,受控结构较无控结构的节点加速度峰值最大有60 %~90 %的降低。图17~20给出了网壳屋盖监测节点的水平和竖向位移响应峰值。结果表明,受控结构节点位移峰值与非受控结构相比有明显的降低。表5列出了网壳监测节点在x、y和z向的最大位移减震率。可以看出,网壳节点位移减震率最大值在50 %~90 %。表6给出了柱顶监测节点的位移响应峰值和其对应的减震率。可以看到,在全部地震工况下,受控结构的柱顶位移较无控结构均有明显的减小。两种隔震系统相比,FPB隔震体系对网壳屋盖及其下部结构的位移控制效果要优于S-FPB隔震体系。
受控结构中监测隔震支座的位移响应峰值如表7所示。比较结果显示,与单纯的FPB相比,S-FPB有效降低了隔震装置的位移响应,相应的减震率位于20 %~40 %。图21给出了隔震装置中SMA拉索产生的最大轴向位移,从图21中可以看出,SMA单元的最大位移值在2~3 mm,远小于SMA拉索的设计位移值。
(a) x方向(b) y方向(c) z方向
(a) x方向(b) y方向(c) z方向

(a) x方向(b) y方向(c) z方向
(a) x方向(b) y方向(c) z方向
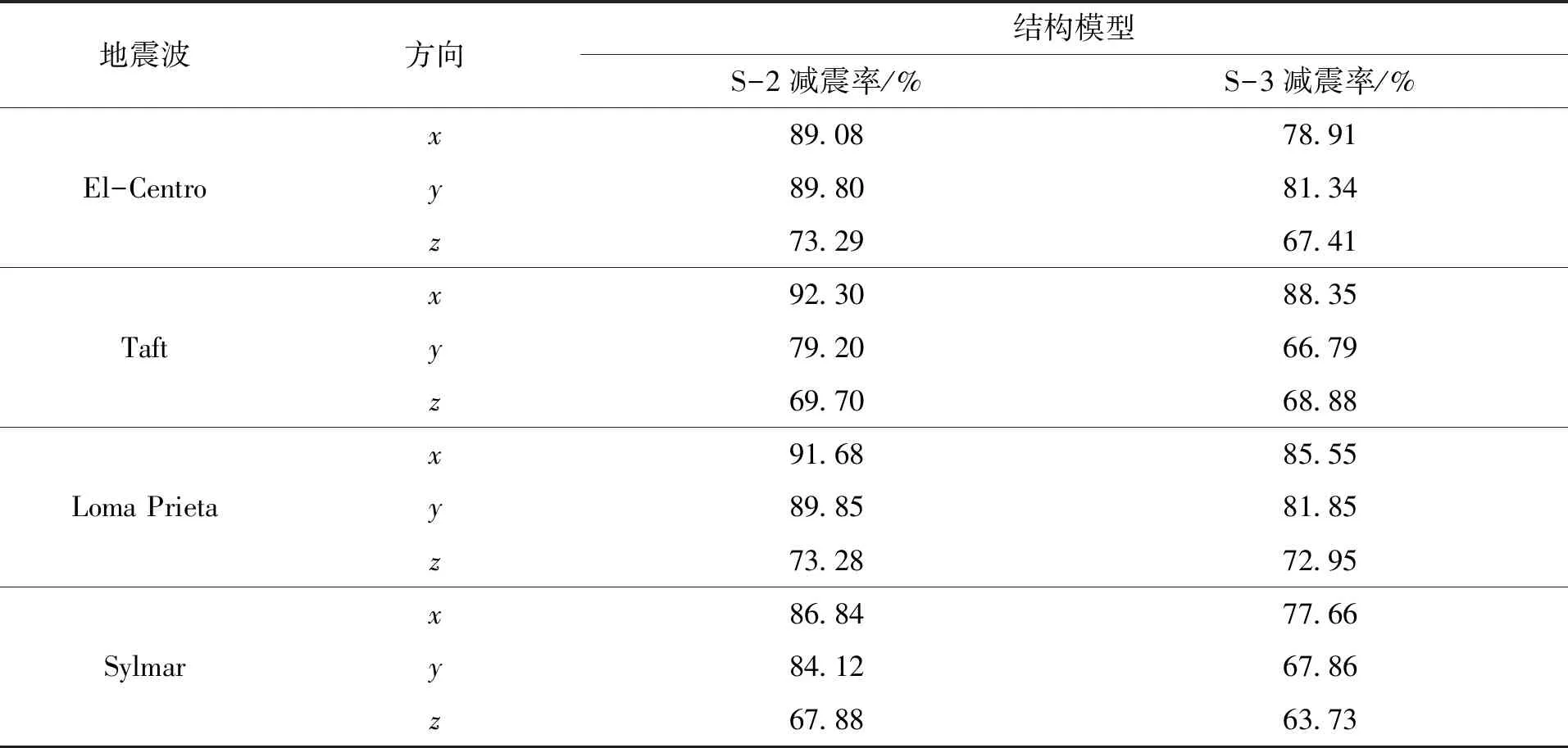
地震波方向结构模型S-2减震率/%S-3减震率/%x89.0878.91El-Centroy89.8081.34z73.2967.41x92.3088.35Tafty79.2066.79z69.7068.88x91.6885.55Loma Prietay89.8581.85z73.2872.95x86.8477.66Sylmary84.1267.86z67.8863.73
(a) x方向
(b) y方向
(c) z方向
图17 El-Centro波作用下网壳屋盖节点的峰值位移
Fig.17 Peak displacement of selected nodes in lattice shell under El-Centro wave
(a) x方向(b) y方向(c) z方向

(a) x方向(b) y方向(c) z方向
(a) x方向(b) y方向(c) z方向
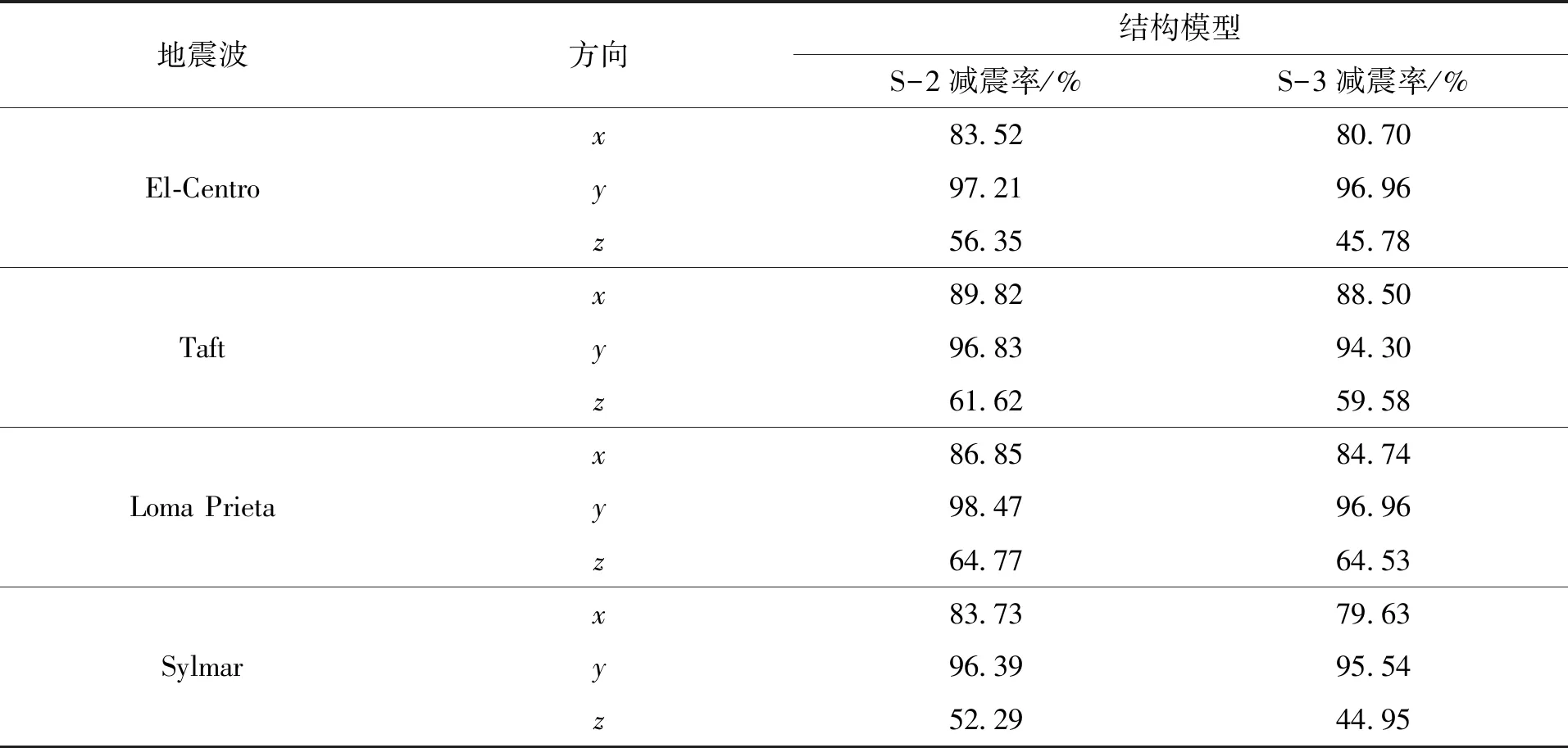
地震波方向结构模型S-2减震率/%S-3减震率/%x83.5280.70El-Centroy97.2196.96z56.3545.78x89.8288.50Tafty96.8394.30z61.6259.58x86.8584.74Loma Prietay98.4796.96z64.7764.53x83.7379.63Sylmary96.3995.54z52.2944.95
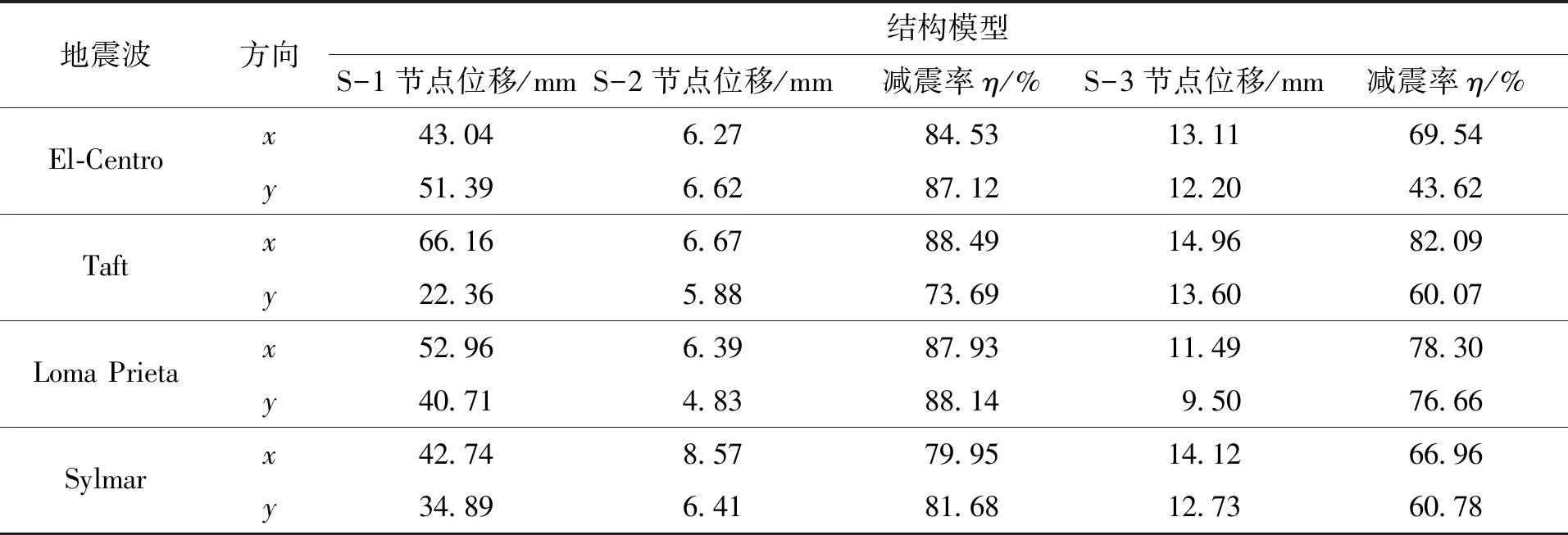
表6 柱顶监测节点最大位移响应及其对应的减震率Tab.6 Peak displacement responses and corresponding reduction ratio for selected node at column top

表7 隔震装置最大位移响应Tab.7 Peak displacement responses for selected sliding isolator
通过有限元分析得到的最大等效塑性应变如表8所示。从表中可以看出,在各个地震工况下,使用隔震体系的球面网壳结构中不存在任何塑性变形,这意味着结构仍然处于弹性状态。由数值模拟结果可以看出,非受控结构中会产生明显的塑性变形,而且最大等效塑性应变产生于下部结构的柱脚处。除柱脚区域外,非受控结构的其他部位在地震作用期间基本保持在弹性状态。
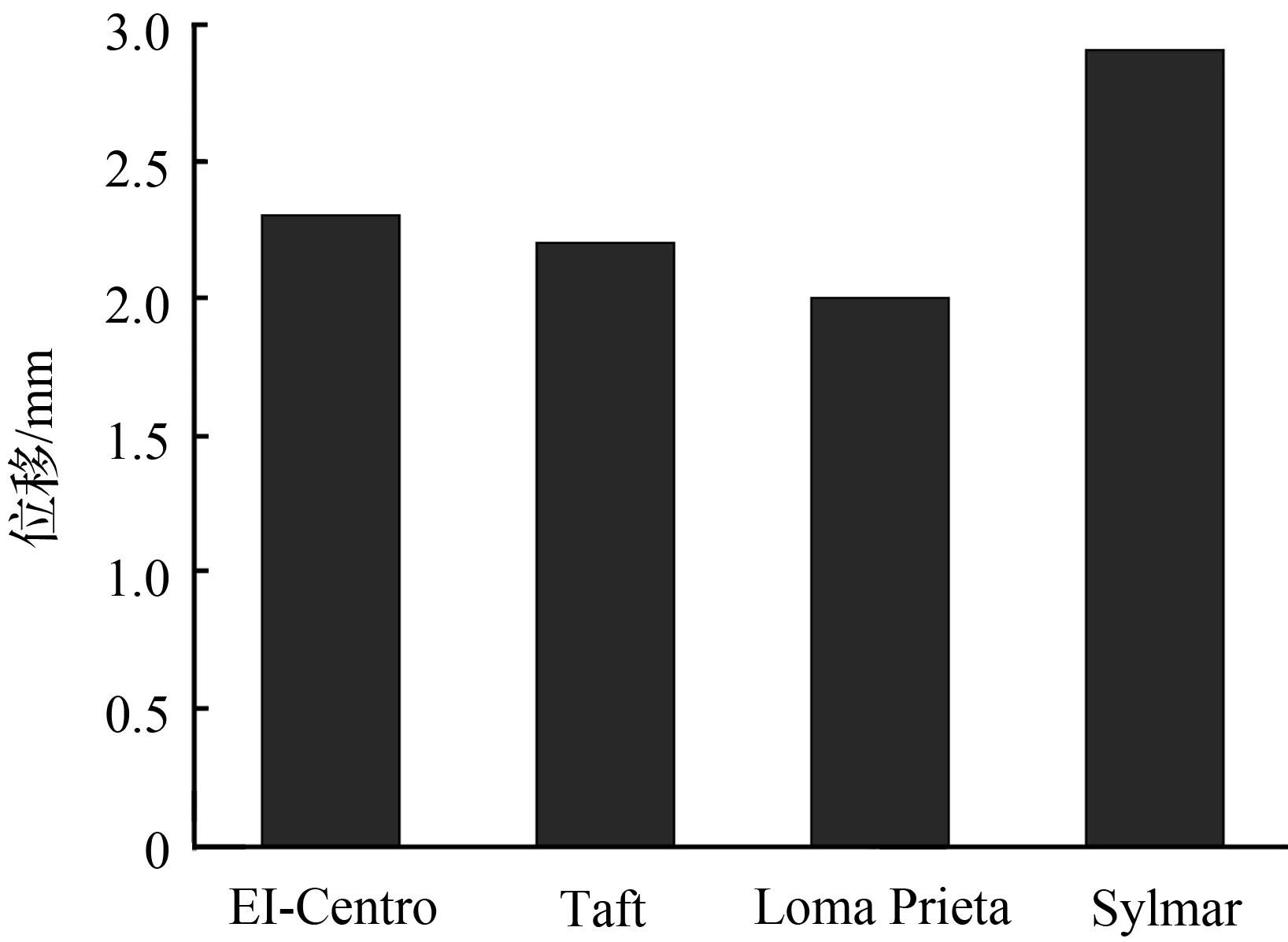
图21 SMA拉索最大拉伸位移Fig.21 Maximum tension displacement of SMA cable
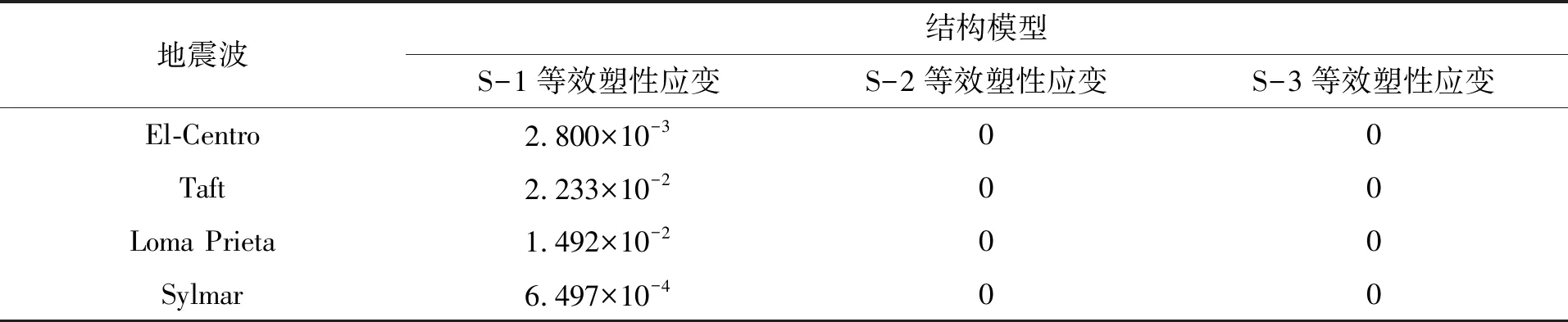
地震波结构模型S-1等效塑性应变S-2等效塑性应变S-3等效塑性应变El-Centro2.800×10-300Taft2.233×10-200Loma Prieta1.492×10-200Sylmar6.497×10-400
5 结论
提出了一种新型超弹性摩擦摆支座(S-FPB),并将其应用于周边支承单层球面网壳结构的高位隔震控制。对受控和无控空间网壳结构进行了非线性抗震分析,得到了如下结论:
①新型隔震装置将FPB和超弹性SMA拉索相结合。在该复合隔震装置中,球形滑动支座用来过滤和耗散大部分地震能量,SMA拉索用来提供限位能力、抗拉拔能力和附加滞回效应。根据有限元分析结果可以看出,与具有相同摩擦面设计参数的FPB相比,S-FPB可提供独特的滞回曲线,体现出较好的耗能和控制能力。
②单层球面网壳结构中,S-FPB体系对大跨屋盖和其下部结构的动力响应均提供了良好的控制效果。综合对比屋盖节点的地震响应可知,使用S-FPB隔震系统可在不同程度上实现水平、竖向三个方向的减震控制。本文涉及的两种隔震系统中,S-FPB系统较FPB系统表现出了更为优越的支座位移控制能力。
③无控网壳在其下部结构的柱脚处出现了明显的塑性变形。在网壳结构中安装S-FPB后,该隔震系统有效控制了上部屋盖和下部结构塑性变形的发展,使整体结构在多维强震激励下依然能够保持弹性状态,从而有效地保护了结构免遭强震损伤。