针对广西地形激光LiDAR点云滤波处理的研究及应用
2019-08-27
(广西壮族自治区遥感信息测绘院, 广西南宁530023)
0 引言
DEM作为重要的测绘成果已经成为国家空间数据基础设施的基本内容之一,在众多领域有着广泛的应用。广西现有的DEM生产方法以航空摄影测量获取的影像数据为主要数据源,生产过程受人工主观因素影响较大,而且传统摄影测量生产DEM必须经过影像匹配、空三加密、密集匹配、立体环境下人机交互等环节,导致DEM生产工艺复杂,周期较长。LiDAR作为一种能够快速精确地获取地面三维数据的技术随之孕育而生。它能快速获取地表点三维数据,相比航拍和二维矢量数据,有着更高的高程精度,在获取高精度DEM尤其是大比例尺的高精度DEM方面有着很大的优势。但是在基于LiDAR点云数据生成DEM的过程中发现,使用单一滤波算法存在着分类不准确的问题。所以,本文提出针对广西境内多种类型地貌特征采取不同滤波算法,大幅度提高广西地区DEM数据生产的精度和效率,满足多行业领域对高精度高程数据产品的广泛需求,同时将完善广西的1∶10000比例尺基础地理信息数据产品,优化测绘地理信息产业结构,提升测绘地理信息数据产品的保障性作用,推动信息化建设、促进经济社会可持续发展。
在国外,Lindenberger 较早应用数学形态学[1]对剖面式测高数据先执行开运算,然后使用自回归过程调整运算结果,实现对原始数据滤波,该算法原理简单、实现效率高,但缺乏适应性,容易削平地形。Vosselman[2]提出了基于 坡度的滤波算法,该方法需要根据待判点的距离以及地形坡度计算高程阈值大小,将满足条件的点归类为地面点。Sithole等[3]对该算法进行改进,根据地形变化动态设置阈值,该算法计算简单,提升了其适应性。在国内,罗伊萍等[4]采用多尺度的方式有效改善了固定窗口大小,提升了数学形态学算法的适应性,但组织形式有损原始数据的精度。徐国杰等[5]采用设定点到三角面的最大距离和点与三角面顶点的连线形成的最大角的方式对不规则三角网进行改进,并对参数动态调整,多次迭代完成滤波,由于需要多次迭代,运行效率较差。
1 激光LiDAR原理
激光探测和测距技术(light detection and ranging, LiDAR)是20世纪80年代发展起来的能够直接获取对象表面的三维点云信息数据的高新技术[6]。为了更高效地获取三维空间信息,以飞机为载体的机载激光雷达(Airborne-LiDAR)测量技术不断发展,作为一种新兴的空间对地观测技术,机载LiDAR集激光测距技术、 高精度动态载体姿态测量技术(INS)和高精度动态GPS 差分定位技术于一身,能够快速获取精确的高分辨率的数字地面模型以及地面物体的三维坐标[7]。
机载LiDAR系统主要包括激光扫描仪、惯性测量单元、差分GPS接收机和成像设备[8]。该系统以飞机为载体,一同组建了机载LiDAR测量系统。其系统组成见图1。
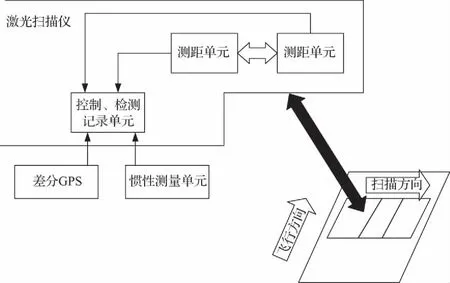
图1 激光雷达系统组成Fig.1 Composition of Lidar system
2 实验分析
2.1 实验数据
本文所使用的数据为2017年10月期间获取到的广西梧州市苍梧县测区约100 km2LiDAR点云数据。实验区域具有植被茂密区、陡石山区、大量水体等多种地类,基本包含广西境内的地形地貌,所以本文实验具有针对广西地形的机载LiDAR滤波算法的代表性。点云密度为每平方米0.5个点,满足1∶10000DEM一级精度的生产要求,回波信息及强度信息都有记录。如图2为该测区全貌的点云数据及DEM产品。
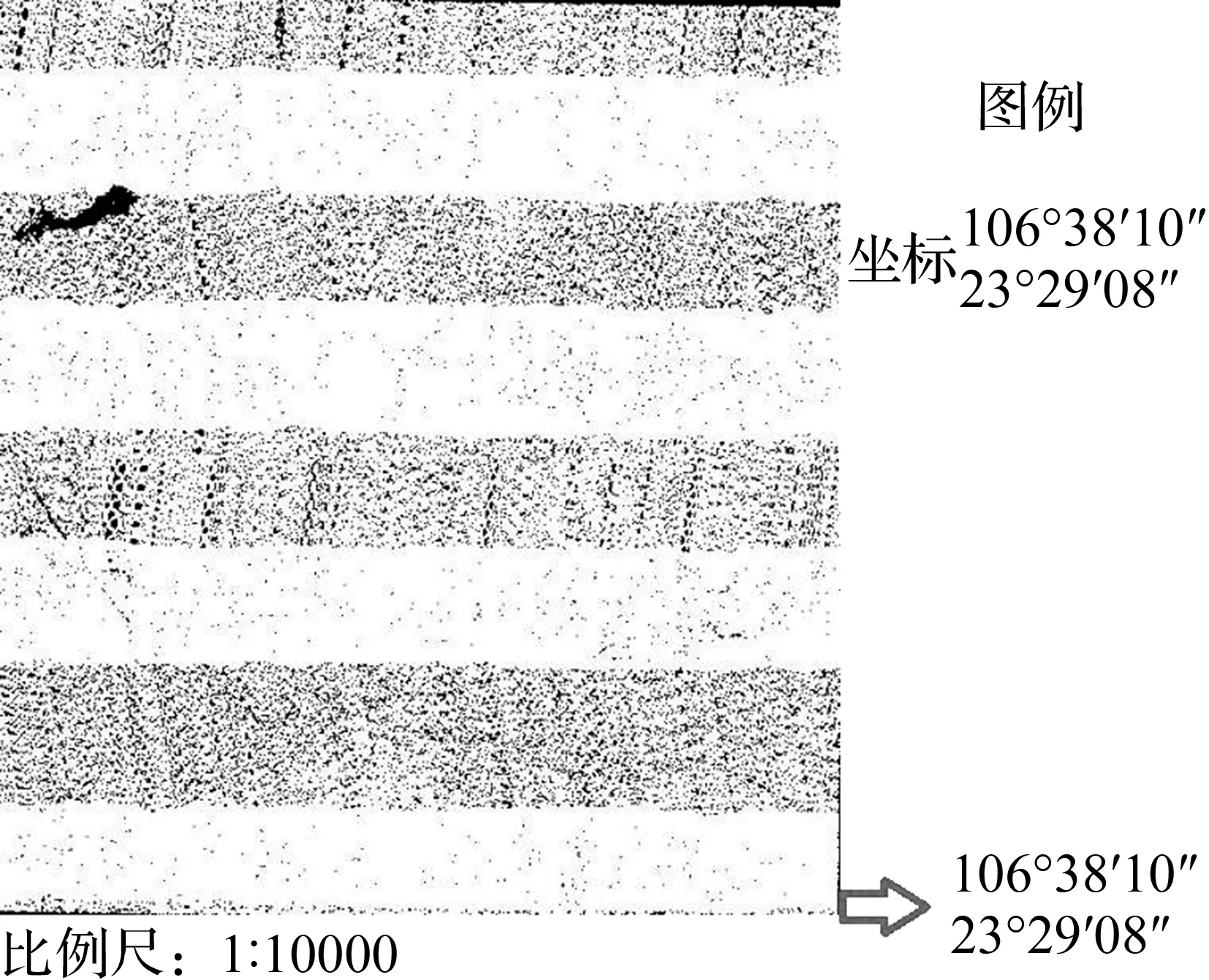
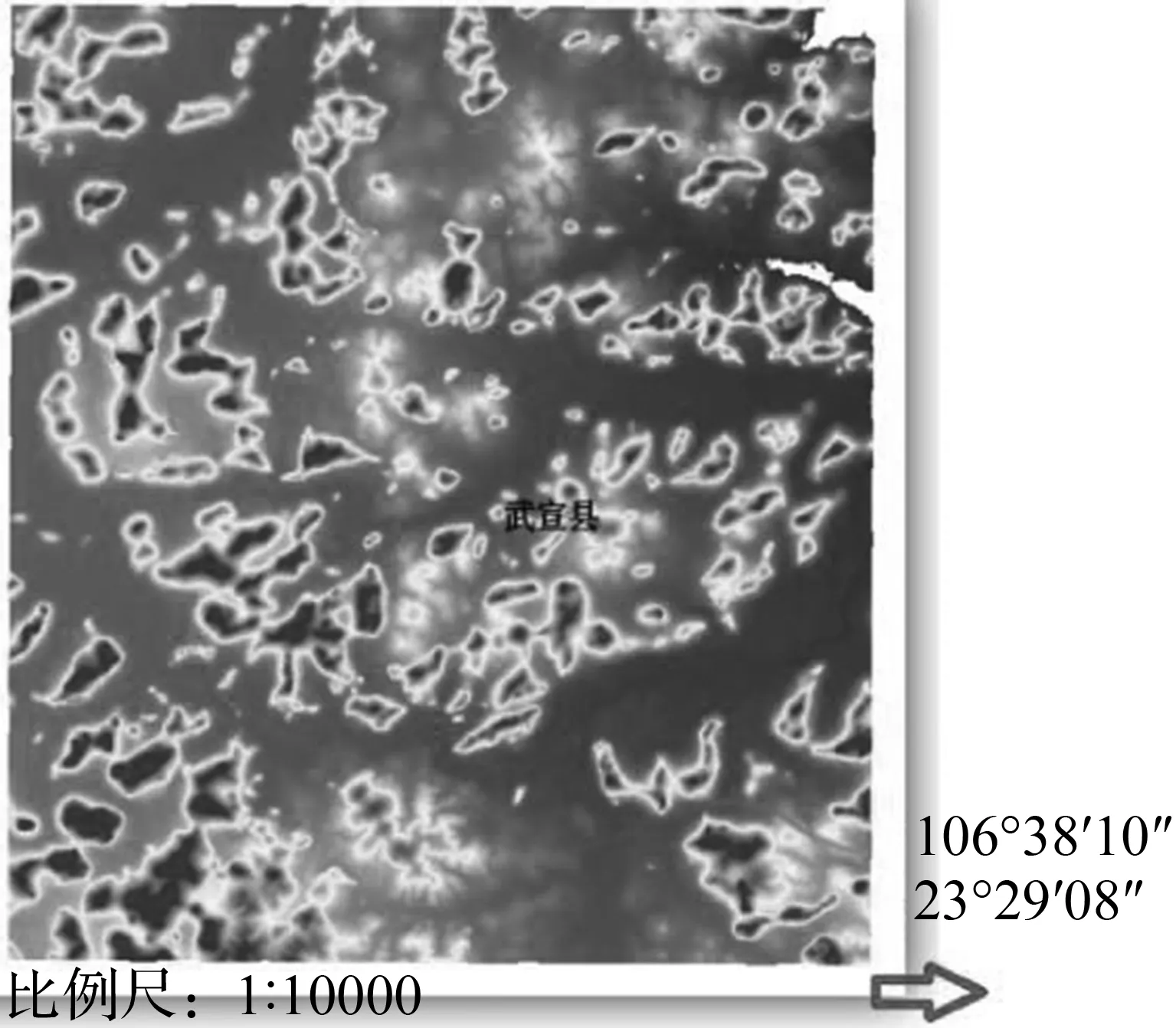
图2 测区点云数据及DEM产品
Fig.2 Point cloud data and DEM products of surveying area

图3 改进的滤波算法流程图Fig.3 Flow chart of improved filtering algorithm
2.2 陡石山区
2.2.1 多植被及陡石山区点云数据分类、滤波方法研究
现有的成熟滤波算法如渐进加密三角网滤波算法、移动窗口滤波算法、形态学滤波算法等[9-10],均是以假设一个初始地形,然后在该初始地形的基础上,以局部高程突变作为判据进行迭代地面点分类,由于陡峭地形高程突变大,滤波算法迭代效果也较差,很容易削平山形点,产生漏分类。
本小节将根据陡峭石山的特点,在渐进加密三角网滤波算法基础上提出一种顾及地形的滤波算法(图3)。首先根据初始地形种子点预判地形类别,大致将地形分为平坦地区和山地。在平坦地区无需做特殊处理,现有的算法即可高效地进行地面点分类。在山地区域,则加密初始种子点,获得一个较为贴近真值的地形初始值,然后在山区采用强滤波参数进行特殊处理,尽可能多地将陡峭石山的点云分类到地面点,从而增强现有滤波算法的精度,提高破碎地貌LiDAR点云地面点分类的自动化程度。
2.2.2 实验结果
如图4所示,左侧为渐进加密三角网滤波算法生成的三角网,右侧为改进后的滤波算法生成的三角网。由于山体过于陡峭,所以常规滤波算法将大部分地表点分类错误,导致山体存在大量缺失,对后期人工编辑影响非常大。并且从图5看出,该区域还存在低矮植被的干扰,严重影响输出DEM的质量。而使用改进后的滤波算法,可以看出地形较为平滑,整个山形还是比较完整。从剖面图5看出,基本地面点都分类正确。
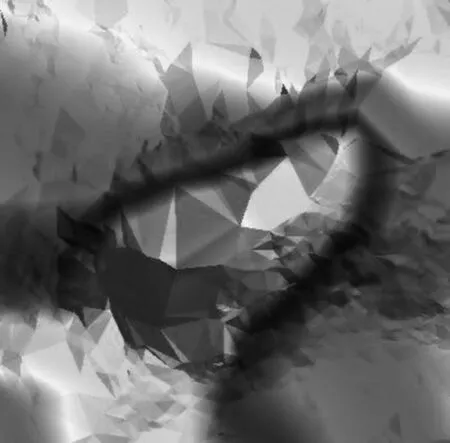
2.3 水体、断壁区域
2.3.1 快速约束Delaunay三角网算法
广西境内存在大量的河流、湖泊,并且地貌破碎,陡崖、断壁较为常见,因此,在点云生产DEM作业时,不可避免的需要添加大量的断裂线。而现有的一些断裂线添加方法或者国外商业软件中现有的断裂线模块添加作业复杂,工作量繁重,极大影响作业效率。本研究将以Delaunay三角网逐点插入算法为基础,基于Delaunay三角网的点云索引方法,利用高效索引(如四叉树、kd树等)快速定位断位裂线线段在三角网中的位置[11-13],并根据线段和三角网拓扑关系快速计算特征点,实现断裂线的快速添加(图6)。
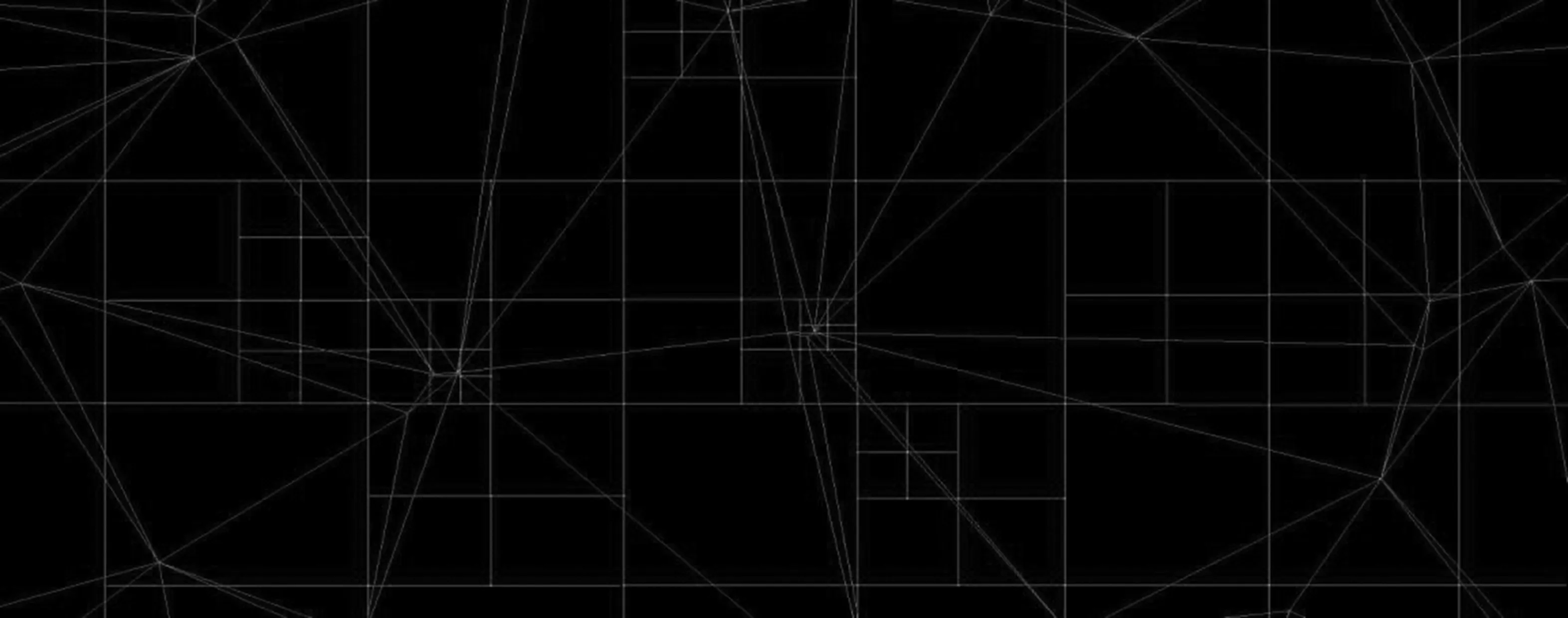
图6 三角网叠加四叉树索引示意图Fig.6 Triangulation overlay quadtree index
2.3.2 实验结果
如图7,图8所示,使用约束Delaunay三角网算法之前,水域及坎边的边界不明显。而且因边界上有点之间构TIN,会导致后期输出DEM错误。这时,采用约束Delaunay三角网算法在边界添加断裂线,对该类问题有明显改善。
2.4 密集植被区
2.4.1 曲面内插算法
相比摄影测量,机载LiDAR在植被覆盖区域能够获取部分地形点。但是在植被覆盖很厚的地区,获得的地面点也很有限,太少的地形点不足以表示山体形态。在作业中通常会对该类区域缺失的地形点需要进行添加点的操作,以获取较高精度且美观的DEM成果。本小节将针对广西地区茂密植被区域点云数据的特点,采用曲面内插算法,以仅有的少量树下真实地表点作为控制点,参考植被趋势面和树高,对缺失的地形点进行光滑内插,提高植被覆盖区域的数据处理效率,生产符合实际地形的DEM。
2.4.2 实验结果
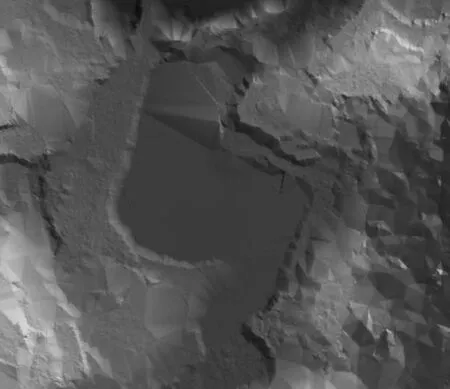
从图9三角网对比图能够和直观的看出,运用常规滤波方法后构建的三角网体现的山形不符合正常的山形,丢失了部分地表信息,而采用曲面内插算法对缺失地形进行光滑内插后,还原了正确的山形。由图10剖面对比图可以看出,由于植被过于茂密,在这个小山头处只有植被点,没有激光点到达下方的地面,导致构建三角网时,此时已经无法通过滤波和分类获得地面点云。此时采用曲面内插算法,向点云数据添加新的拟合地面点。

3 结论
实验表明,在广西这种地形多变、复杂的区域,如果只依靠传统的滤波算法大范围一体化处理点云数据,具有一定的难度,或者说滤波结果具有较大的偏差。点云数据滤波的结果主要取决于滤波算法、地区的地形地貌复杂程度、点云密度。对于广西的陡石山地形,由于地表的陡然起伏,真实的地表信息会被常规的滤波算法过滤;对于水体、断壁周边,由于各点间距过大,常规算法会将点构成不真实地表模型;对于广西的茂密植被区,由于抵达真实地面的点云数据少,真正的地表反而会被当作低点被过滤掉。这些区域往往还需要人工干预,这就对作业人员的素质有一定要求,同时大大增加了作业量,降低了制作DEM的效率,且容易漏分类和错分类。