相控阵天线方向图仿真与分析
2019-08-11关成准谭顺成
关成准,张 磊,谭顺成,叶 文
(1.91411部队,辽宁旅顺116041;2.海军航空大学,山东 烟台264001;3.国防大学联合勤务学院,北京100036)
雷达天线是雷达的重要组成部分,直接影响着雷达的探测距离、角度分辨率、抗干扰能力等[1]。相控阵天线技术相对于传统的机械扫描雷达天线,具有扫描速度快、波束控制灵活的特点[2],促进了多目标、多任务雷达发展;同时,由于其一般由很多固态TR组件组成分布式发射和接收机,具有可靠性高、稳定性好的优势。为了提高作战能力,现代舰艇和飞机大量装备了相控阵体制雷达[3-4]。但相控阵雷达在提高雷达性能的同时,由于其工作机理的原因,造成了其应用的复杂性,如随着电扫描角度的变化,其波束宽度、增益、副瓣等均发生变化,对于雷达的探测距离、角度分辨率、测角精度以及抗干扰能力均产生实时的影响[5-7]。而且随着技术的发展目前对新型相控阵技术的研究也在进行,造成了天线方向图的形式越来越复杂、应用也越来越广泛[8-12]。因此,在使用中,对相控阵天线方向图的准确掌握尤为重要。目前,对这方面的研究比较多,有效且准确性和可信度较高的方法是采用实际测试的方法,如文献[13]研究了相控阵天线的近场测试方法,对于相控阵雷达研制生产阶段进行测试是必要的,但这种方法需要大型的微波暗室,耗费的时间也非常长,不适用于算法研究、战法仿真等情况。此外,文献[14]研究的采用半实物仿真的方式对相控阵雷达进行研究,也不失为一种较好的规避相控阵天线复杂性的一种好方法,但这种方法也限于本身有雷达以及丰富的配套装设备的情况下应用。
在进行算法研究、战法仿真等应用领域,一种有效且经济的手段是采用仿真的手段实时产生相控阵雷达方向图。Keysight公司的SystemVue软件提供了相控阵天线的仿真模块[15]。文献[16]基于该软件进行了相关的仿真分析,该软件提供的仿真模块,通过有限的关键参数设置生成实时天线方向图,但由于该模块是固化在整个软件内部的,无法进行他用。另外,能进行的设置也有限,不够灵活,因而应用大大受限。
由于天线方向图对雷达重要影响,而相控阵天线方向图又存在复杂变化的问题,为实时定量获取相控阵天线方向图,本文以一维线阵为例,探讨了相控阵天线方向图的定量仿真方法,并进行多参数的验证。
1 相控阵天线基本原理
以图1所示一维直线阵为例,假设各阵元为全向天线时,则此时天线方向图函数为[5]:

假设移相量满足:

式(2)中,θ0为波束指向偏离法线的角度/rad。
由式(1)、(2)可得:

由式(3)可知,当

时,Fa(θ)最大,即天线指向θ0方向。
可见,通过改变移相量,可改变相控阵雷达波束指向,此为相控阵雷达基本工作原理。
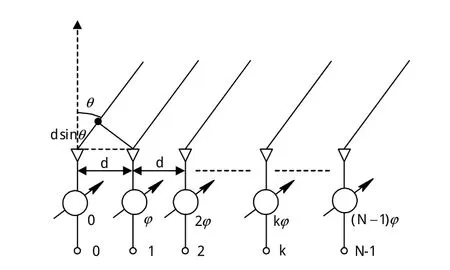
图1 相控阵天线原理示意图Fig.1 Schematic diagram of phased array antenna
实际上,相控阵天线各阵元并非全向天线,其本身也有方向性,因而相控阵天线方向图应为阵面方向图和阵元方向图在相应方位上乘积的结果。
阵元方向图可以用典型函数进行近似,常用的有高斯函数和辛格函数。高斯函数为:
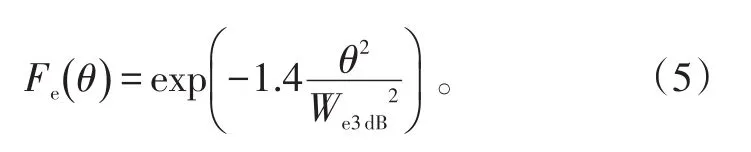
式(5)中,We3dB为阵元3dB波束宽度。
辛格函数近似公式为:
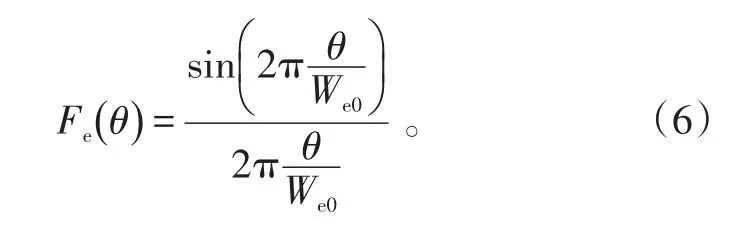
式(6)中,We0为阵元的第一零点波束宽度。
2 相控阵天线方向图仿真软件开发
式(1)阐述了相控阵天线某θ方位上的增益与移相量、波长、阵元间隔、阵元个数之间的关系,而天线方向图描述的是天线全方位的增益分布情况。因此,必须要利用计算机强大的计算能力进行实现。下面从程序流程图、开发软件的选择、前面板设计、程序框图设计、数据存储格式等方面分别进行阐述。
2.1 程序流程图
本软件的程序流程见图2。基本流程为:程序开始后,监控参数是否改变,参数改变则进入天线增益计算循环,以1°为分辨率进行全方位计算,完成后自动退出循环并进行数据分析处理,将仿真计算结果以图形、数值等方式显示,可根据需要进行数据存储。然后,进行等待循环,继续等待参数改变或退出程序。

图2 程序流程图Fig.2 Program flow chart
2.2 开发软件的选择
本文选用LabVIEW进行软件的开发。LabVIEW是美国NI公司旗下的虚拟仪器开发软件,是典型的图形化编程语言,称之为G语言(Graphical Programming Language),采用数据流的开发理念,契合工程技术人员的思维习惯,大大简化了开发的工作量[17-18]。
LabVIEW 的程序称为VI(Virtual Instrument),每个VI由2个窗口组成,分别为前面板窗口和程序框图窗口,前面板窗口相当于仪器的前面板,主要用于输入输出,有常用的控件形式可选;程序框图窗口相当于一般高级语言的文本编辑器,又相当于仪器的内部电路。
2.3 前面板设计
综合考虑要验证的指标和相控阵天线的主要参数,进行前面板控件的设计,如图3所示。
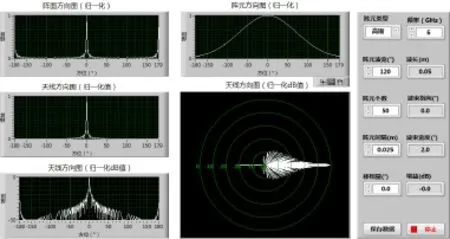
图3 前面板设计Fig.3 Front panel design
2.3.1 输入控件的设置
根据相控阵天线基本原理可知,影响其阵面方向图及波束指向的参数有阵元个数、频率(波长)、阵元间隔、移相量等。阵元方向图也是直接影响天线方向图的因素。本文设置了高斯、辛格2种阵元方向图近似函数[19],同时设置全向阵元作为对比。对于高斯、辛格2种近似函数要进行波束宽度的设置。其中,高斯函数的波束宽度为3dB波束宽度,辛格函数的波束宽度为第一零点的波束宽度。“保存数据”用于将阵面方向图数据、阵元方向图数据、天线方向图数据和天线方向图(dB)数据存储在excel文件中,便于进行定量分析。“停止”按键用于停止并退出程序。
2.3.2 显示控件的设置
显示控件主要用于将仿真结果以数值和图形的形式形象地展示出来。设置了波长数值显示控件,其直接和频率相关;波束指向、波束宽度、天线增益3个数值显示控件,便于定量分析。为提高全面展示相控阵天线方向图设置了图形显示控件,包括以直角坐标方式显示的归一化的阵面方向图、阵元方向图、天线方向图(dB),还提供了以极坐标方式显示的天线方向图(dB)。
2.4 程序框图设计
程序采用事件结构进行开发,以最大程度地减少对计算机资源的占用。程序框图见图4,可以划分为3个主要功能区。在图4中,分别以编号的弧形矩形框标注出来,其中区域1实现天线方向图和波束指向、波束宽度、增益计算功能。为使程序简便,采用公式节点进行实现,其中阵面增益计算公式为式(3)。针对不同的阵元模型,采用条件结构进行切换调用不同公式节点。高斯阵元模型和辛格阵元模型的天线方向图公式如式(5)、(6)所示。图4中,公式节点的阵元模型为辛格函数,图5、6分别给出了高斯阵元模型和全向阵元模型的公式节点。区域2实现图形显示,分别以直角坐标和极坐标绘制各方向图。而区域3实现数据保存,用于将各方向图数据保存在指定命名格式的excel文件中。
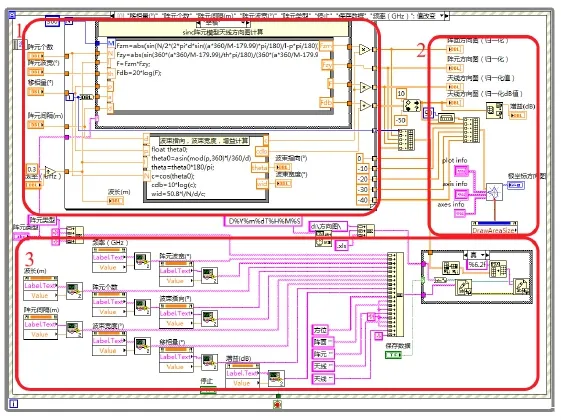
图4 程序框图设计Fig.4 Program block diagram design chart

图5 高斯阵元模型Fig.5 Gauss element model
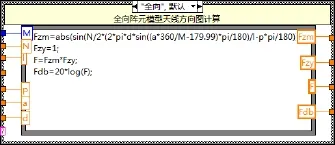
图6 全向阵元模型Fig.6 Omnidirectional element model
2.5 数据存储格式
为便于定量分析以及数据的调用,将仿真结果以表格形式存储于excel文件中。为防止重名,文件以时间命名“D年月日T时分秒.xls”,如图7所示。前10列为相关参数设置以及仿真得到定量结果;从第12列到371列存储的是包括角度、归一化阵面增益、归一化阵元增益、归一化天线增益、归一化天线增益(dB值)等方向图数据表格。利用该数据表,可基于excel插入图形工具方便地进行方向图的直观展示。

图7 数据存储格式Fig.7 Data storage format
3 相控阵天线方向图仿真分析
如前所述,相控阵天线受多种参数的影响,而且在其扫描的过程中实时变化,由于影响因素多,变化复杂,需对开发的仿真软件进行较全面的验证。通过改变重要参数进行仿真,将仿真结果与理论结果进行定性对比分析,以验证仿真软件的有效性。
3.1 相位扫描分析
与图3相比,图8将移相量由0°改变为127°,波束指向偏转了44.9°,验证了相控阵控制的原理,即通过相位控制可实现波束指向的改变,且经计算数值与式(2)计算结果吻合;波束宽度由2.0°展宽为2.9°,归一化增益由0dB减小为-3.2dB,验证了相控阵天线波束指向偏离法线方向越远则波束宽度越宽,增益越小,且满足余弦函数关系。
进一步增加移相量为173.9°。此时,波束偏转75°,而波束宽度达到7.9°,增益减小到-10.7dB。可见,此时天线的性能已经大幅下降,失去实际应用价值,验证了相控阵天线电扫描范围为±60°的结论。
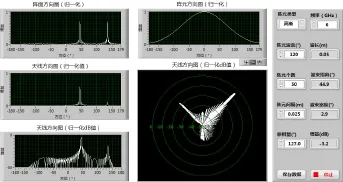
图8 改变移相量Fig.8 Change of phase shift
3.2 阵元间隔影响分析
与图3相比,图9将阵元间隔由0.025 m增大为0.08 m,可见波束宽度由2°减小为0.6°,验证了波束宽度与天线口径成反比;同时,图8出现了明显的栅瓣效应,而图2没有,也验证了阵元间隔大于半波长时会出现栅瓣效应。

图9 改变阵元间隔Fig.9 Change of the element spacing
3.3 阵元个数影响分析
与图3比,图10将阵元个数由50增加到100,可见波束宽度由2°减小为1°,也验证了波束宽度与天线口径成反比的关系;同时验证了阵元间隔等于半波长时,100个阵元口径对应的波束宽度为1°的经验公式。
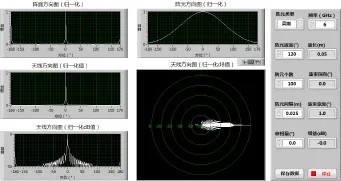
图10 改变阵元个数Fig.10 Change of elements number
3.4 阵元模型影响分析
与图3相比,图11将阵元模型改为辛格函数,阵元第一零点波束宽度为200°,可见此时尾瓣明显增大,也验证了相控阵天线方向图是由阵面方向图和阵元方向图共同决定的,阵元的方向图明显影响相控阵天线的副瓣和尾瓣性能。

图11 改变阵元模型Fig.11 Change of the element model
4 结语
为定量地研究相控阵天线对雷达性能的影响,基于相控阵天线的基本原理,综合考虑相控阵天线的主要影响参数,采用数值和图像化相结合的显示方式,研究开发了相控阵天线方向图仿真软件。
经测试,可进行频率、阵元个数、阵元间隔、阵元波束宽度、移相量等参数的设置,实时地以图形方式显示天线方向图,并以数值方式显示波束指向、波束宽度、天线增益等指标。通过不同条件下的仿真结果对比分析,本软件可合理有效地对相控阵天线方向图进行实时定量的仿真分析。该方法及仿真结果可应用于相控阵雷达的性能分析和评估中。