基于FCD的城市交叉口拥堵事件计算机检测算法
2019-08-06赵跃东陈晶晶安徽维德工业自动化有限公司
文/赵跃东 陈晶晶(安徽维德工业自动化有限公司)

一、概述
城市60%的交通拥堵通常是由无法预知其发生时间、地点和模式的交通事件引起的,交通拥堵会带来交通延误,影响交通安全,也会加剧环境污染。交通事件自动检测(Automatic Incident Detection,AID)技术为解决城市交通拥堵问题提供了可能。
20 世纪60年代以来,国内外许多机构在研究开发和改进事件自动检测(AID)算法方面做了大量的工作,并提出了一系列基于固定检测器的事件检测算法[1,2],如图1 所示。目前被应用的AID 算法,除直接检测方法(视频检测法)外,大致可分为基于模式识别的算法(或称比较算法)、基于统计理论的算法、基于交通流模型的算法、基于人工智能的算法和基于小波分析理论的算法五类。其中绝大部分AID 算法都是针对高速公路或城市快速路,这些道路很少出现停车等待现象,而城市道路存在交通信号灯,停车等待是必然现象,这些AID 算法很难直接应用。另外由于固定检测器采集的是定点数据,所以难以代表真实的交通状况。
FCD(Floating Car Data)数据采集技术则是通过浮动车GPS 定位数据信息(包括浮动车ID、地理坐标、瞬间车速和行驶方向等)和GIS 地图数据匹配,动态计算路网的平均车速数据,为路网交通运行状态(畅通、拥堵等)提供重要的判别依据,具有一定的优势,已被国内外广泛应用,基于FCD 的交通事件检测算法成为研究的热点。国外学者研究了一些基于FCD 的事件检测算法[3],主要有MIT 算法、TTI 算法、UCB 算法、ADVANCE 算法、TRANSMIT 算法等。但由于城市道路交通流的复杂性,上述算法并没有取得较好的检测效果。从直观上看,这些算法的缺点在于没有考虑道路交叉口交通信号对交通拥堵事件检测的影响,因此城市交通事件检测算法仍然有待进一步完善。
本文将FCD 计算的路网平均车速数据和城市道路交通信号控制参数联系起来检测道路交通事件的发生。首先通过分析实时上传的FCD 以及城市道路交通信号周期数据,充分挖掘交叉口产生交通拥堵时的交通流特征,建立快速有效的AID 算法,实现交叉口拥堵事件和拥堵消散的快速检测,并利用宁波市实际浮动车数据和交通信号周期数据进行了算法的有效性验证。
二、交叉口拥堵事件检测算法
根据城市交通实际情况,交通事件主要分为事故、拥堵和疑似拥堵三类。对于路段,一般检测交通事故的发生;对于交叉口,一般检测入口方向的拥堵和疑似拥堵发生。城市交叉口拥堵治理是城市交通管理的核心,因此本文主要关注交叉口入口方向的疑似拥堵或拥堵情况的检测。
1.交叉口拥堵检测算法基本原理
路段行驶时间和行驶速度是表征路网交通拥堵状态的两个直观、有效的交通流参数,同理当交叉口发生疑似拥堵或拥堵时,浮动车停留在交叉口所关联路段的时间,即在交叉口入口方向路段的行驶时间将超过多个信号周期,同时浮动车在交叉口入口方向路段上的行驶速度将小于拥堵速度阈值。基于上述情况,通过对浮动车在交叉口入口方向路段的平均车速(以下称交叉口平均车速)、停留时间和交叉口信号周期进行综合分析,可以形成以下两个交叉口拥堵判定条件:当交叉口平均车速小于其拥堵速度阈值且停留时间大于2 个及以上交叉口信号周期时间时,判定为交叉口入口方向疑似拥堵;当交叉口平均车速小于其拥堵速度阈值且停留的时间超过2 个及以上交叉口信号周期时间,且该状态持续时间大于2 个及以上检测周期时,判定为该交叉口入口方向拥堵。
2.交叉口拥堵检测算法逻辑步骤
交叉口拥堵检测算法的逻辑步骤见图1。
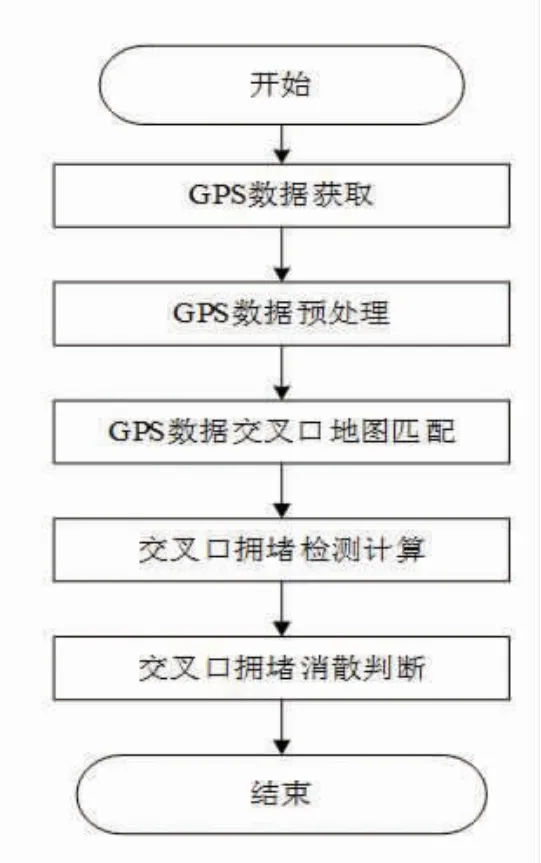
图1 交叉口拥堵检测算法的逻辑步骤
首先将实时获取的GPS 数据点位匹配到路网弧段上,然后将匹配后的GPS 数据和对应的弧段与交叉口相关联。地图匹配采用基于位置点的匹配方法[4],选择候选路段中距离度量值最小的作为匹配路段,距离度量值的计算公式如下:

其中:△d为 GPS 距离误差,d为 GPS 点到道路的投影距离,θ为车辆行驶方向与路段矢量方向差值。
交叉口拥堵检测计算的处理过程见图2。
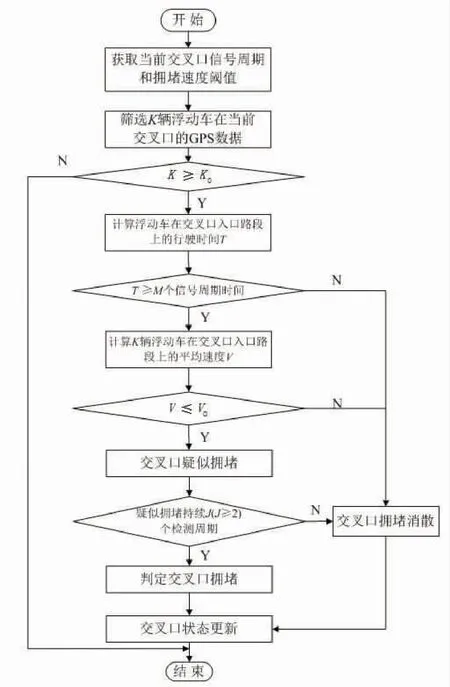
图2 交叉口拥堵检测计算过程
具体计算步骤如下:
Step1:在完成GPS 数据的交叉口地图匹配后,获取当前交叉口的信号周期和拥堵速度阈值;
Step2:筛选K辆浮动车在交叉口入口方向所关联路段上的GPS 数据,判断K是否大于或等于预设的最小样本数K0,若是则执行Step3,若否则结束本次流程判断;
Step3:计算浮动车在交叉口入口路段上的行驶时间T,判断T是否大于或等于M个信号周期时间,若是则执行Step4,若否则执行交叉口拥堵消散判断;
Step4:计算当前检测周期内K辆浮动车在交叉口入口路段上的平均速度V,判断V是否小于或等于交叉口的拥堵速度阈值V0,若是则可判定交叉口疑似拥堵,若否则执行交叉口拥堵消散判断;
Step5:判断交叉口疑似拥堵情况是否持续了J个检测周期,若是则可进一步判定待检测交叉口入口方向拥堵,并更新交叉口状态为拥堵,若否则执行交叉口拥堵消散判断。
当执行交叉口拥堵消散判断时,若交叉口当前状态为拥堵,则将其修改为疑似拥堵,若交叉口当前状态为疑似拥堵,则将其修改为畅通,若当前状态为畅通,则保持不变。
三、算法验证与分析
1.评价指标
目前,国内外常用的事件检测评价指标主要有检测率(Detection Rate, DR)、误报率(False Alarm Rate, FAR)和平均检测时间(Mean Time to Detect,MTD),其中检测率和误报率通常用来度量事件检测算法的效能,平均检测时间则用来反映算法的效率。通常情况下这三个指标的相对重要程度为:DR > FAR > MTD。
检测率DR 定义为一定时间段内检测到的交通拥堵数与实际发生总的交通拥堵数之比,以百分数表示。误报率FAR 定义为一定时间段内,误报拥堵次数与算法检测到的拥堵总次数之比,以百分数表示,也可以表示为每个时间段的误报次数。平均检测时间MTD 定义为从拥堵发生到检测算法检测到拥堵之间的平均时间间隔。
2.数据来源
本文基于宁波市交通事件自动检测(AID)系统项目,数据来源于该城市市区范围内浮动车实时上传的GPS 数据和该城市使用的SCATS 系统(Sydney Coordinated Adaptive Traffic System 即悉尼自适应交通控制系统)提供的信号周期数据。浮动车样本数共有4400 多辆,占城市车辆数量的5%,满足浮动车技术应用的最小样本需求,GPS 数据采样周期为15s,属高频采样数据,保证了一条路段上能够得到多个GPS 数据。
3.评价分析
本文采用评价指标中检测率和误报率对算法进行定量验证分析。

表1 交叉口拥堵检测验证结果
检测率DR。从视频监控系统中抽取交叉口的N 次交通拥堵事件,检查同一时间段内本方法所产生的拥堵报警次数n,则:

误报率FAR。从交通事件自动检测(AID)系统中任意抽取N 次拥堵报警,通过视频监控系统观察同一时间段内同一位置实际发生的交通拥堵次数n,则:
采用宁波市浮动车实时上传的GPS 和信号控制系统上传的信号周期数据进行验证,选取高峰时段(7:00—9:00,17:00—19:00)对本文方法进行验证(每 3 分钟进行一次拥堵判别),验证结果见表1。
从表1可以看出,本文提出的交叉口拥堵检测算法检测率达到了96.1%,误报率为6.6%,而误报率主要是由于疑似拥堵事件的判定而产生的,因此本文算法能有效检测城市道路交叉口交通拥堵事件的发生。
