原始数据动态观察窗法在火灾特征信号融合提取中的应用研究
2022-05-06李卫高丁文婷赵望达
李卫高,丁文婷,赵望达
(1.清远市人防(民防)工程管理中心,广东 清远,511500;2.沈阳建筑大学 土木工程学院,辽宁 沈阳,110168;3.中南大学 土木工程学院,湖南 长沙,410075)
火灾发生过程是一个复杂多变的过程,信号特征有时波动性较大,单一信号探测技术很难满足火灾的复杂性和多特征性[1-2]。将多源信息融合、神经网络、模糊逻辑技术应用于火灾探测及报警技术中,提出基于多源信息融合的火灾探测报警系统[3]。同时火灾特征信号融合提取算法的优劣显对火灾探测结果影响较大[4]。
多特征信号融合提取算法有线性方法特征提取和非线性方法特征提取[5],主要有原始数据动态观察窗法、主元成分分析(PCA)、独立成分分析(ICA)、局部性嵌入(LLE)[6]、拉普拉斯特征映射[7]、等距映射[8]、神经网络、主曲线和表面等多种方法。Derbel F[9]提出原始数据动态观察窗测量一段时间内参量变化的方法,该方法可以很好的解决局部波动较大的信号的提取,对于火灾特征信号波动下较大这一特性具有较好的适应性。王学贵[10]提出若将全部数据采样提取,会增加信息融合的维度。王殊[11]在提出的复合特定趋势检测算法基础上进一步改进,采用了长度自动变化的计算窗应用于火灾自动探测中能及时识别火灾。
利用创建的神经网络分类器,研究不同步长、窗长算法提取的训练样本对于神经网络分类器训练的影响,期待找到最优的步长和窗长提取训练样本。
1 火灾特征信号融合提取算法
1.1 神经网络分类器训练样本的建立
神经网络分类器训练时的输入端为火灾数据,原始数据采样间隔短,数据庞大,如果全部直接输入会造成很大无用功。采用原始数据动态观察窗法对原始数据提取,该方法的主要两个影响因素是窗长和步长。窗长过小会导致局部错误突变数据对探测结果造成影响,窗长过长又会导致某些突变趋势无法及时体现[12]。步长过小会导致数据处理量加大,步长过长也无法及时探测到火灾。另外窗长与步长之间还存在耦合问题,如果两者耦合好,会得到更好地训练神经网络模型。动态观察窗窗长含义如图1所示。
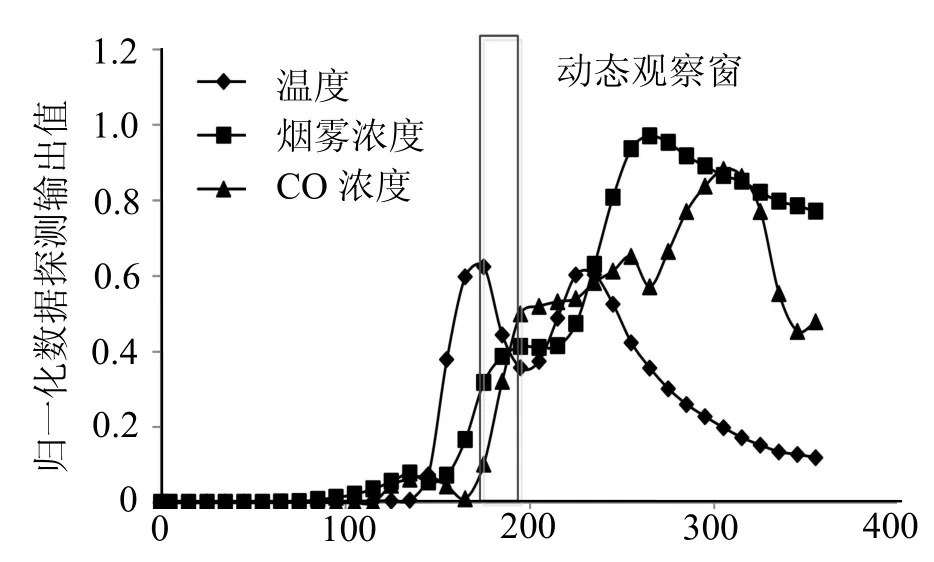
图1 动态观察窗示意图
神经网络模型的训练样本采用窗长为5、10、15、20 s, 步长为 5、10、15、20、25、30、35、40 s提取NIST FR系列试验中试验6的原始数据得到32个训练样本。
FR 4016系列试验是由美国国家标准与技术研究院(NIST)开展,目的是为了研究不同类型传感器在火灾探测及报警系统的性能,该试验在居民建筑内开展了一系列实体实际尺寸的试验。该建筑的建筑面积是84.7 m2,由卧室、浴室、厨房、客厅和餐厅等组成,FR 4016试验详细情况及数据结果详见试验报告[12]。
1.2 神经网络分类器测试样本的选取
数据测试样本采用同为阴燃火的试验6的原始数据,由于本次研究与火灾具体含义无关,前边阴燃阶段各参数变化较小,仅截取6 500 s以后数据,每5 s采样一次最为最终测试样本。
数据融合时,需要对各参数进行归一化,然后再输入到神经网络中进行分析。归一化采用式(1)计算,计算后的数据位于0到1之间。由于只考虑网络性能,归一化时为了更为精确,不再考虑各种参数最大可能区间,

其中xmax为数据中最大数值,xmin为最小数值。本文选用试验6作为测试样本,试验6截取试验数据曲线如图2所示,归一化结果如图3所示。
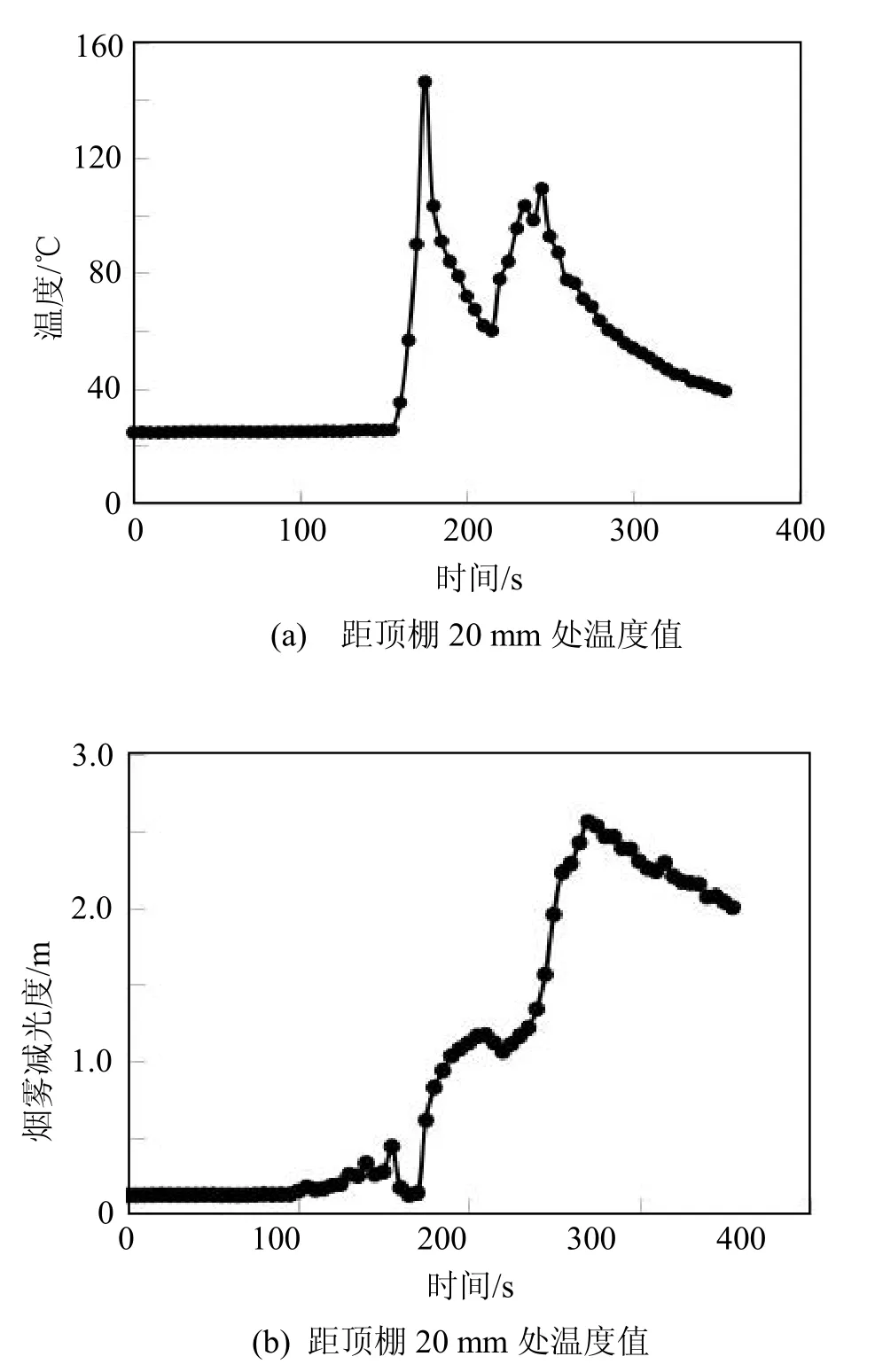
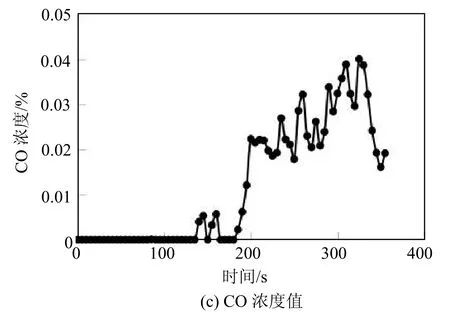
图2 试验6截取试验数据曲线图
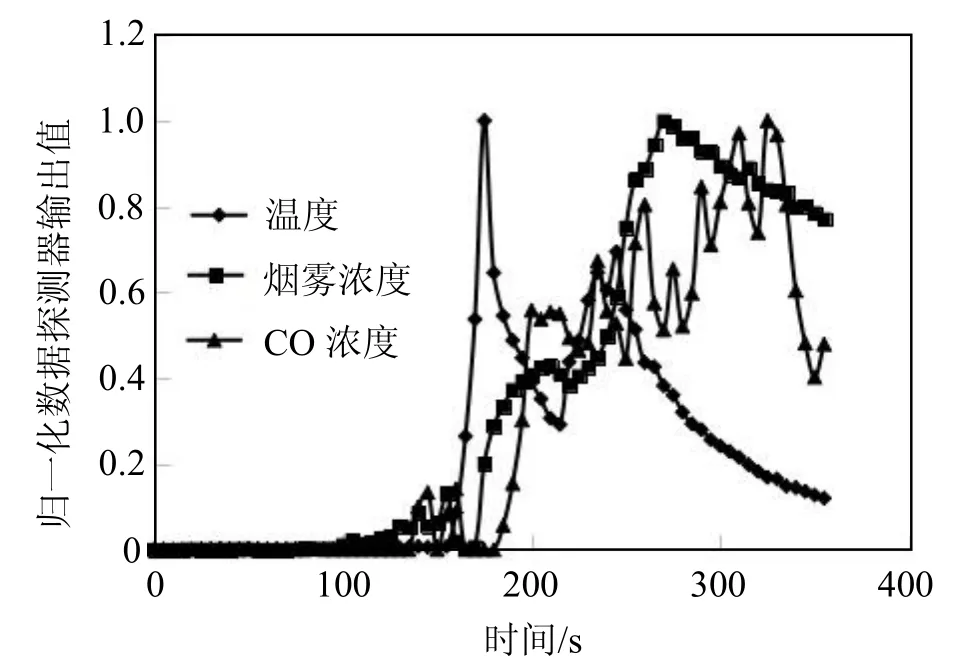
图3 试验6数据归一化结果
由图3可知,160 s时发生了显然的火灾特征,确定160 s为火灾临界点。在分析火灾探测器性能时,常采用灵敏度和错报率来评价探测器的性能。灵敏度为第一次输出火灾信号的时间点,错报率为非火灾时输出火灾信号和火灾时输出非火灾信号。本次试验中,网络输出值在160 s之后(含)第一次为火灾信号的时间,响应时间越短,说明探测器灵敏度越高;160 s之前为非火灾信号,160 s之后(含)为火灾信号,160 s之前网络输出为火灾的概率和160 s之后网络输出为非火灾的概率之和为误报率。
1.3 神经网络分类器建立
本文对神经网络分类器本身性能不作研究,简单选用Matlab中默认的BP网络进行训练和仿真。其隐含层节点数为7。设定网络输出0.6以上(含)为火灾,0.6以下为非火灾。
Matlab中数据读取及仿真部分代码如下:

2 神经网络模型训练和测试结果
利用32个训练样本对建立的神经网络模型进行训练学习,再利用测试样本进行仿真实验,测试结果如下(其中训练步长表示神经网络的训练步长)。
(1) 5 s窗长
5 s步长,训练次数21次,探测点160,误报率0%;10 s步长,训练次数10次,探测点165,误报率1.39%;15 s步长,训练次数10次,探测点165,误报率1.39%;20 s步长,训练次数30次,探测点160,误报率4.17%;25 s步长,训练次数6次,探测点195,误报率9.72%;30 s步长,训练次数7次,探测点175,误报率4.17%;35 s步长,训练次数8次,探测点175,误报率8.33%;40 s步长,训练次数36次,探测点140,误报率12.5%。
(2) 10 s窗长
5 s步长,训练次数19次,探测点165,误报率1.39%;10 s步长,训练次数13次,探测点165,误报率1.39%;15 s步长,训练次数8次,探测点170,误报率2.78%;20 s步长,训练次数9次,探测点165,误报率2.78%;25 s步长,训练次数21次,探测点175,误报率4.17%;30 s步长,训练次数8次,探测点170,误报率2.78%;35 s步长,训练次数9次,探测点195,误报率9.72%;40 s步长,训练次数8次,探测点160,误报率5.56%。
(3) 15 s窗长
5s步长,训练次数21次,探测点160,误报率0%;10 s步长,训练次数11次,探测点160,误报率0%;15 s步长,训练次数8次,探测点170,误报率2.78%;20 s步长,训练次数8次,探测点170,误报率2.78%;25 s步长,训练次数12次,探测点170,误报率6.94%;30 s步长,训练次数17次,探测点180,误报率5.56%;35 s步长,训练次数7次,探测点165,误报率1.39%;40 s步长,训练次数18次,探测点165,误报率2.78%。
(4) 20 s窗长
5 s步长,训练次数11次,探测点160,误报率0%;10 s步长,训练次数22次,探测点160,误报率0%;15 s步长,训练次数9次,探测点160,误报率4.17%;20 s步长,训练次数5次,探测点170,误报率2.78%;25 s步长,训练次数9次,探测点165,误报率4.17%;30 s步长,训练次数5次,探测点160,误报率0%;35 s步长,训练次数8次,探测点170,误报率2.78%;40 s步长,训练次数7次,探测点170,误报率2.78%。
在此仅给出10 s窗长、不同步长提取训练样本训练的BP神经网络网络测试结果(图4)。

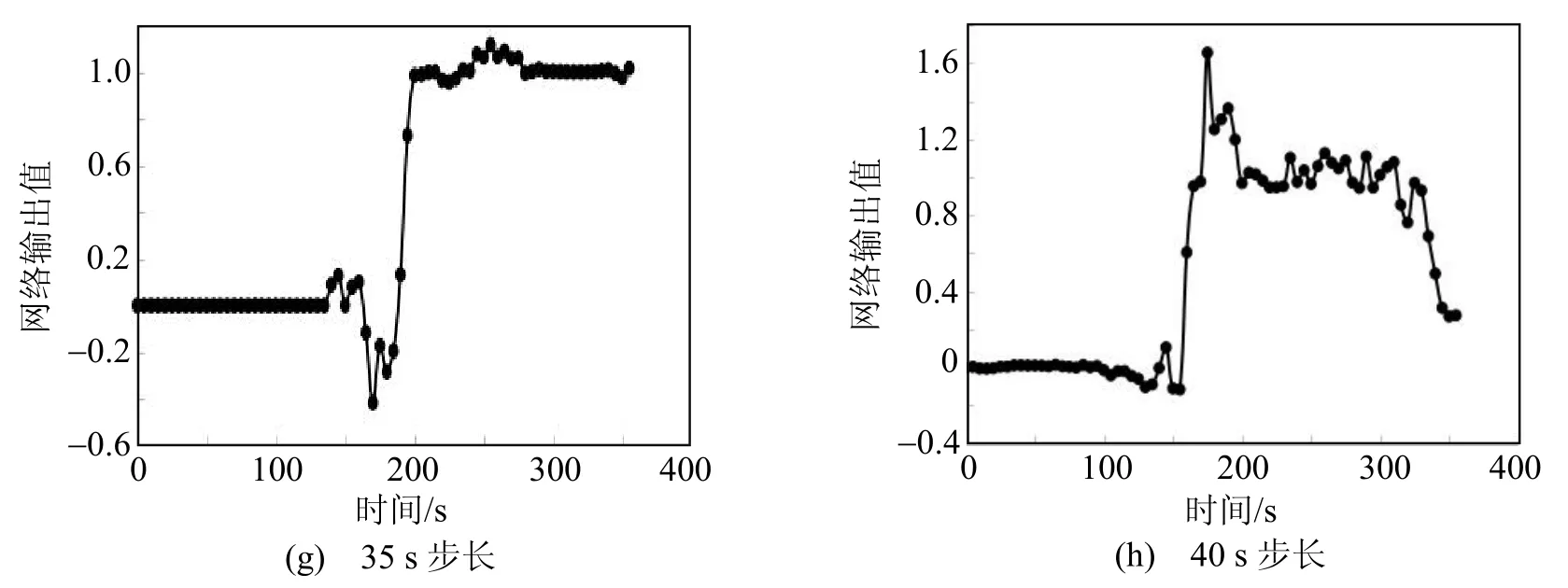
图4 10s窗长下不同步长测试结果描点图
3 结果分析
3.1 步长对测试结果的影响
在设定相同窗长情况下,研究不同步长对探测性能的影响。以步长为横坐标作图,可以得到不同步长下训练得到的BP网络训练分类器的响应时间和错报率曲线图(见图5和图6)。
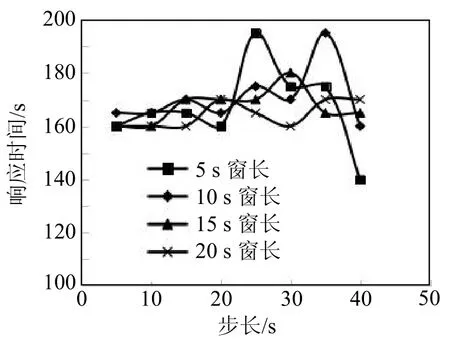
图5 分类器响应时间曲线
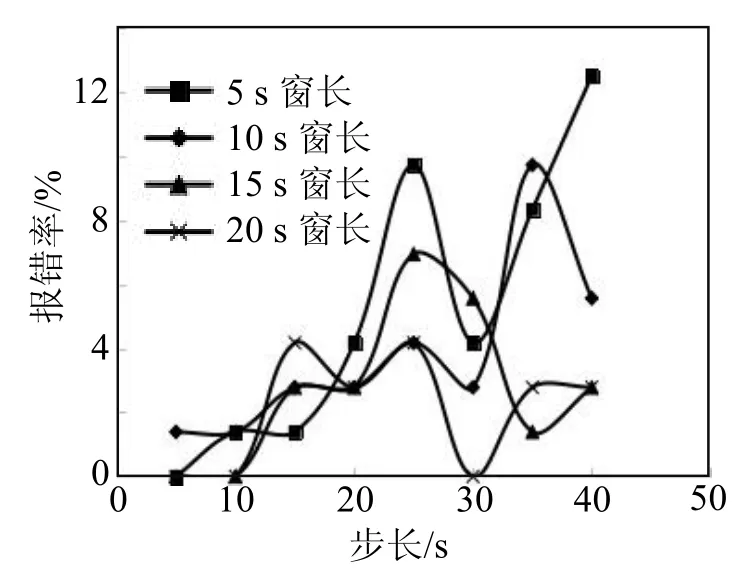
图6 分类器错报率曲线
从响应时间曲线上可以看出,在较小窗长下,响应时间随着步长增加变大,且整体波动较大,在较大窗长下,响应时间随着步长增加略有增加,且整体波动较小。
从错报率曲线上可以看出,在较小窗长下,错报率时间随着步长增加变大,且变化幅度较大,在较大窗长下,错报率随着步长增加略有增加,且增幅较小。
综上,步长越短,探测性能越好,但是过短的步长会增加神经网络的训练次数。5 s较10 s各参数变化较小,所以建议采用10 s步长,且采用3种特征分类器时,对训练数据的提取步长不应超过20 s。
3.2 窗长对测试结果的影响
在设定相同步长情况下,研究不同窗长对探测性能的影响。以窗长为横坐标作图,可以得到不同窗长下训练得到的BP网络训练分类器的响应时间和错报率曲线图(见图7和图8)。
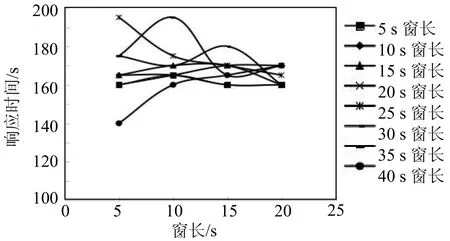
图7 分类器响应时间曲线
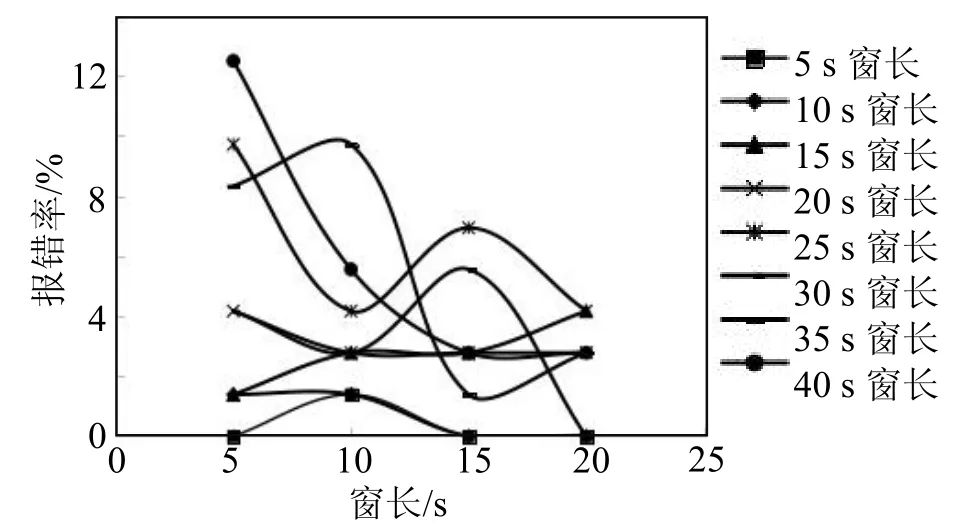
图8 分类器错报率曲线
由图7和图8可知,响应时间随着窗长增加变小,错报率随着窗长增加变小。
综上,窗长越长,探测性能越好,窗长过长会导致部分突变火灾信号无法捕捉,10 s步长情况下,15 s窗长和20 s窗长性能一样,建议采用15 s窗长,且采用3种特征分类器时,对训练数据的提取窗长不应低于15 s。
4 结论
(1)动态观察窗融合提取火灾特性信号时,采用步长越短,窗长越长,探测性能越好,反之,性能越差。
(2)5 s窗长,40 s步长响应时间小于160 s,产生非火灾信号作为火灾信号误报,这是因为火灾特征信号波形性较大,过于小的窗长与过于大的步长,会使神经网络捕捉到环境的影响信号而产生误判。
(3)步长过短会增加训练对于硬件资源的要求,窗长过长会导致某些突变火灾信号探测不灵敏,建议选用10 s步长和15 s窗长。
