车载充电电源DC/DC变换器数字控制系统设计*
2019-07-19郑征秦熙东陶海军
郑征 秦熙东 陶海军
(河南理工大学,焦作 454000)
主题词:车载充电电源 DC/DC变换器 数字峰值电流控制 斜坡补偿 自动死区控制
1 前言
电动汽车具有能源利用率高、无污染等优点[1]。可充电汽车电池组通过充电电源接入电网,车载充电电源主要有两种拓扑:一种是不控整流电路隔离DC/DC变换器,该拓扑谐波高,功率因数不能满足要求;另一种是加入有源功率因数校正的隔离DC/DC变换器,其中AC/DC变换器能实现功率因数校正,提高系统功率密度。DC/DC变换器作为车载充电电源的关键能量转换部分直接影响其效率[2]。移相全桥(Phase Shifted Full Bridge,PSFB)拓扑由于其高效率、高功率密度和易实现软开关(Zero Voltage Switch,ZVS)等优点,被广泛应用于车载充电电源领域[3]。
常用的PSFB DC/DC变换器有两种:一是电压控制型,其设计简单,抗干扰能力强,但存在动态响应较慢和软开关范围受限等问题[4];二是电流控制型,分为平均电流控制型和峰值电流控制型。平均电流控制型抗噪声性能好,但双闭环放大器带宽、增益等参数设计、调试很复杂;峰值电流控制型采用双闭环结构,有动态响应快、改善变压器偏磁和过载保护电路简单等优势[5],但在占空比D>0.5时,出现次谐波振荡现象[6]。
模拟控制芯片存在温漂、控制参数固定和响应速度慢等缺点。数字控制参数配置灵活,可调整死区时间Td,避免了模拟控制条件下死区时间固定导致轻载时软开关困难的问题。文献[7]只在数字控制单电压环下进行了分析与设计;文献[8]提出用数字控制实现平均电流模式PSFB软开关,抗噪声性能好,但电压内环与外环的两套参数配合调试复杂;文献[9]给出了电流峰值控制PSFB方案,但未开展死区时间方面的研究;文献[10]给出了动态调节死区时间的PSFB DC/DC变换器控制方案,但没能实现数字控制。
本文设计了新型PSFB DC/DC ZVS脉冲宽度调制(Pulse Width Modulation,PWM)变换器,变压器原边加入箝位二极管,副边采用同步整流(Synchronous Rectification,SR)技术。采用数字峰值电流移相控制,引入斜坡补偿,避免了次谐波振荡现象,分析了数字PWM实现机理,并提出自动死区控制技术。最后,设计了其硬件电路,实现了宽范围的软开关,提高了系统的动态性能和抗干扰能力,提高了电源效率。
2 车载充电电源DC/DC变换器
2.1 车载充电电源的充电方式
目前,车载充电电源有恒流-恒压充电、变电流间歇充电和多段恒流充电等多种充电方式[11]。其中,恒流-恒压充电先大电流恒流再恒压充电,其充电曲线如图1所示,既避免了电流过充现象,又减小了析气量。恒流模式下,变换器输出电压在很宽的范围内变化。恒压模式下,变换器输出电流从满载逐渐降至零,为了保持良好的软开关特性,同桥臂驱动信号之间的死区时间Td相应增加。
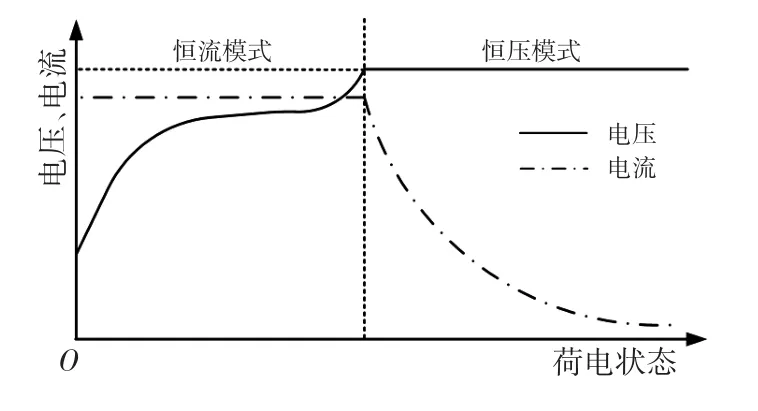
图1 恒流-恒压充电模式
2.2 DC/DC变换器主电路
图2给出了新型带箝位二极管的PSFB ZVS PWM DC/DC变换器主电路拓扑。其输入电压为Vin,开关频率为fs=100 kHz,采用MOSFET组成全桥开关管Q1~Q4。图2中,Lr为谐振电感,C1~C6分别为Q1~Q6上的结电容,Lf和Cf形成输出滤波器,变压器的变比为N,该拓扑的优势在于变压器原边加入箝位二极管D5和D6,抑制了变压器副边的电压振荡,同时,变压器副边引入SR技术,采用MOSFET组成SR管Q5和Q6,降低了整流管的导通损耗。
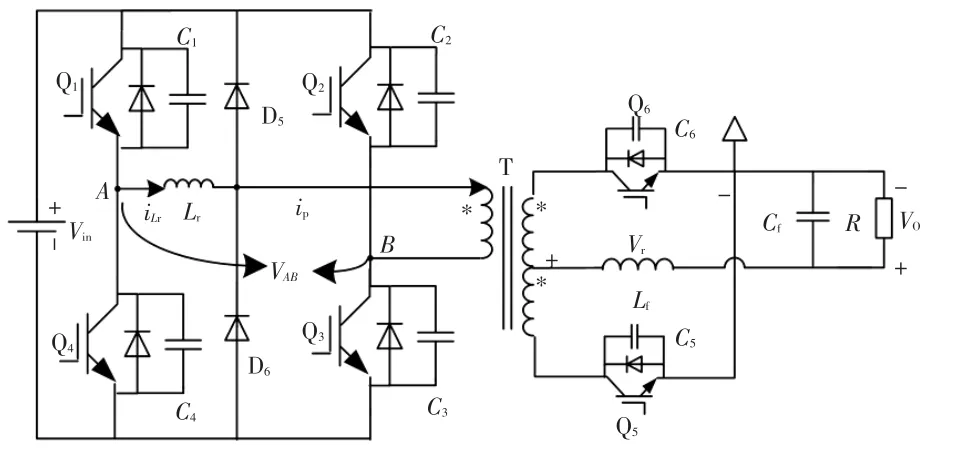
图2 PSFB DC/DC变换器主电路
2.3 峰值电流控制PSFB DC/DC变换器存在的问题
2.3.1 次谐波振荡
峰值电流控制是将实际电感电流与电压外环的输出作比较以确定输出的PWM波。但占空比D>0.5时,变压器原边电流ip的扰动量随着周期的增加越来越大,最终产生振荡,其振荡频率是开关频率的一半,称为次谐波振荡。为此,引入斜坡补偿技术,抑制次谐波振荡。
2.3.2 软开关范围受限
PSFB DC/DC变换器开关过程通过谐振实现,因此开关管两端电压Vds从Vin下降到0并不是瞬间完成的。若同桥臂开关管驱动信号之间的死区时间Td过短,则Vds还未降到0即开通,开关管便失去软开关特性;若Td过长,则Vds降至0后,开关管未能及时开通,Vds通过谐振重新上升,开关管同样失去软开关特性。上述情况使得车载充电电源在恒压充电模式宽负载电流变化条件下,软开关范围严重受限。为此,提出自动死区控制技术,实现宽范围的软开关。
3 峰值电流模式斜坡补偿分析
3.1 斜坡补偿技术
通过引入斜坡补偿,可以避免次谐波振荡现象。斜坡补偿即从电流环控制量Ve中减去斜率为m的斜坡信号。加入斜坡补偿后,变压器原边电流ip扰动变化如图3所示[12]。图中,Ts为开关周期。
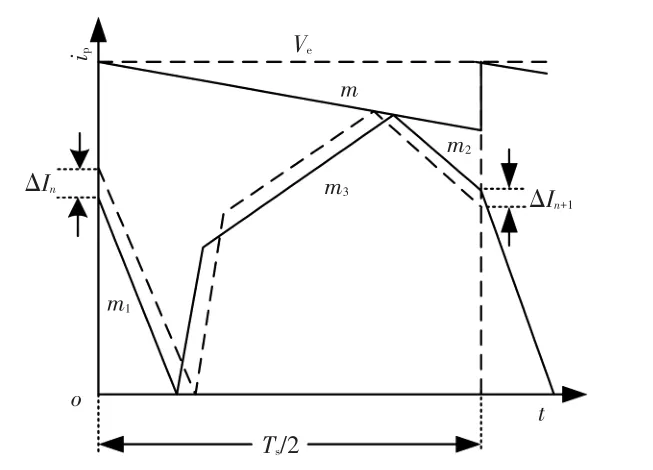
图3 扰动前、后变压器原边电流ip波形
由图3可知,当有电流扰动时,其变化量为:

式中,ΔIn为第n个自然续流末期电流扰动量;m1=Vin/Lr;m2=(VD+Vmos)/Lr;m3=(Vin-NVo)/(N2Lr+Lr);mf=Vo/NLf;VD和Vmos分别为二极管和MOS管导通压降;Vo为输出电压;m为斜坡补偿电流的斜率。
当有电流扰动时,系统稳定的必要条件是:

分析式(1)、式(2)可知,当0≤m≤2m2时,对扰动有抑制作用,当m=2m2时,可完全抑制电流扰动。
3.2 PSFB DC/DC变换器小信号模型
关于PSFB DC/DC变换器的小信号建模,已有学者开展过相关研究。文献[13]给出了2个重要传递函数。


式中,R为电阻负载;Rd=2Lrfr/N2;fr=Ts/2。
3.3 反馈回路传递函数
在峰值电流控制模式中,有斜坡补偿作用时,变压器原边电流和输出电压误差的扰动所引起的占空比变化分别如图4、图5所示。
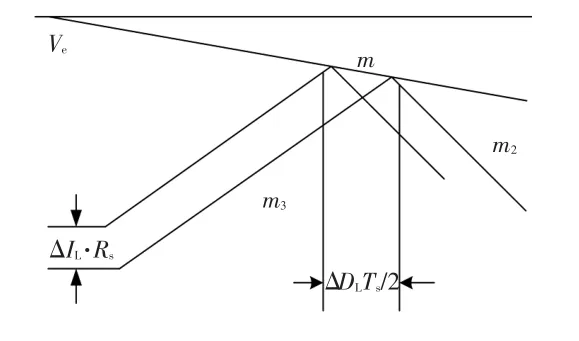
图4 原边电流扰动引起的占空比变化
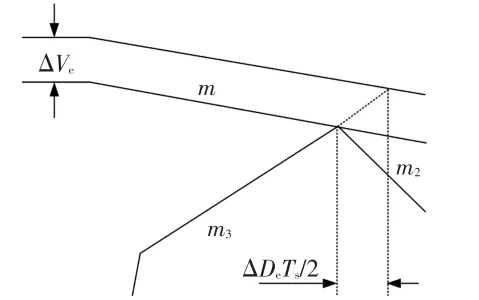
图5 输出电压误差扰动引起的占空比变化
变压器原边电流扰动量ΔIL引起的占空比变化为ΔDL,定义Fi(s)为电流环反馈传递函数,Rs为等效采样电阻。由图4可得:

误差电压Ve的扰动量ΔVe引起的占空比变化为ΔDe。由图5可得补偿前电压环反馈传递函数为:


3.4 控制系统传递函数
加入斜坡补偿后的峰值电流模式控制系统的小信号模型如图6所示。其中,和分别为输入电压Vin、占空比D、输出电感电流iL和输出电压Vo的小信号扰动量,Gvg(s)为输入电压到输出电压的传递函数,Kvof为输出电压反馈系数。
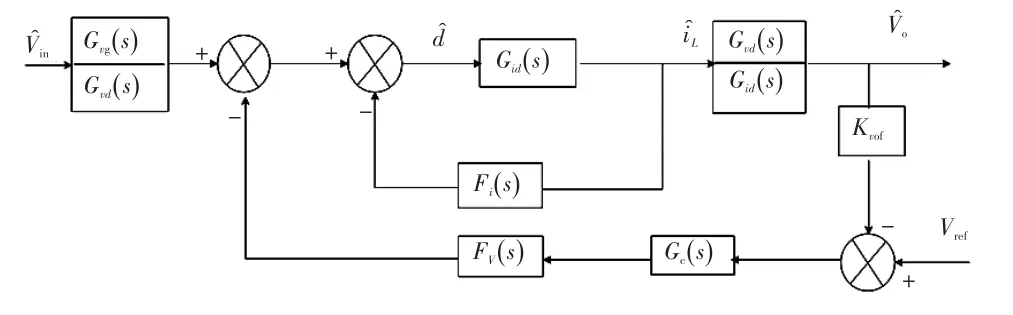
图6 峰值电流模式控制系统框图
电压外环采用PI调节器,即补偿网络传递函数Gc(s)为:

可得峰值电流控制的开环传递函数Go(s)为:

代入表1参数后,根据控制系统对开环频率特性要求,求得PI系数为Kpi=0.524,Kii=11 900。图7给出了电流开环传递函数补偿前和补偿后的Bode图。补偿前的开环截止频率远大于开关频率,且开环幅频特性以-40 dB/dec穿过零分贝线,系统非常不稳定。经补偿后,开环幅频特性以-20 dB/dec穿过零分贝线,截止频率10.22 kHz,相角裕度为164°,系统稳定。
用梯形求和近似积分环节,两点之差近似微分环节的方法,将模拟PID离散化得到数字PID控制器,并通过调用DSP TMS320F28027中CNTL_2P2Z宏模块来实现电压环数字PI控制。此宏模块通过使用双极点、双零点来实现二阶控制。
4 数字式PSFB DC/DC变换器软件设计
4.1 峰值电流数字控制系统
微控制器选用TI的TMS320F28027,因其具有高级片载控制外设,包括增强型模数转换器(Analog to Digital Converter,ADC)、片载模拟比较器、数模转换器(Digital to Analog Converter,DAC)和高精度PWM发生器。此外,其还具有独特的可编程片载斜坡补偿器,可提供至少0.04 μV/s的斜坡补偿,同时可通过软件调整死区时间Td,实现宽范围的软开关。
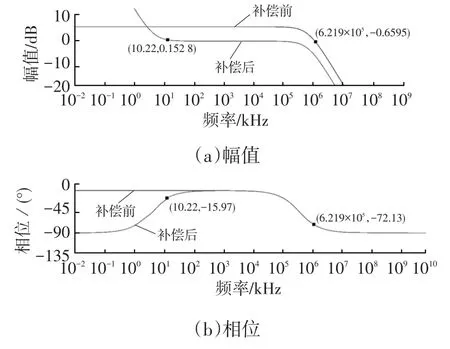
图7 电流开环Bode图
数字峰值电流控制系统如图8所示。设置ePWM1A和ePWM1B驱动开关管Q1和Q4、ePWM2A和ePWM2B驱动开关管Q2和Q3、ePWM4A和ePWM4B驱动SR管Q5和Q6。
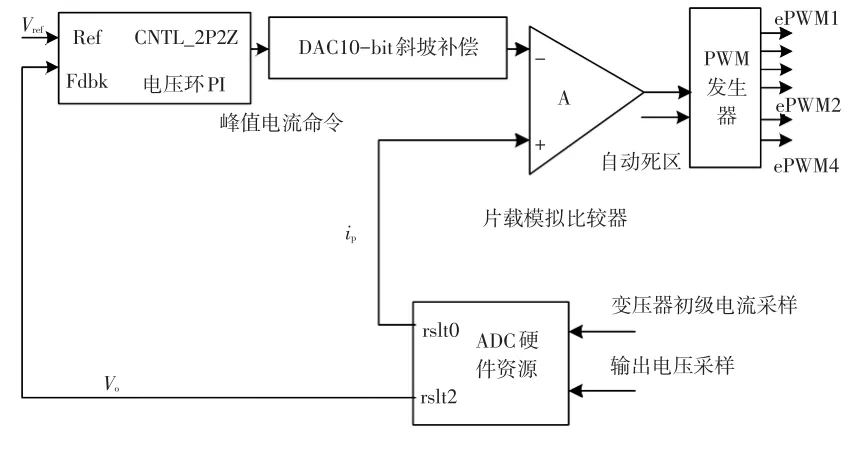
图8 数字峰值电流控制系统
4.2 自动死区控制技术
图9给出了新型PSFB DC/DC变换器半个周期的工作波形,依次为开关管Q1~Q4的驱动波形、原边电流ip、谐振电感电流iLr、原边2个桥臂中点间的电压VAB和副边电压Vr。其中,同桥臂驱动信号之间的死区时间为Td。

图9 DC/DC变换器工作波形
(t0,t1)时间范围内等效电路如图10所示,t0时刻,关断开关管Q1,此时谐振电感Lr、开关管Q1结电容C1和开关管Q4结电容C4以及SR管Q6的结电容C6发生谐振,C1充电,C4、C6放电,ip和iLr开始下降。
此时,开关管Q1结电容C1上电压VC1为:

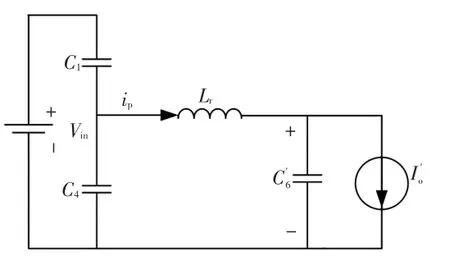
图10 (t0,t1)时刻等效电路
t1时刻,谐振结束,此时VC1=Vin,代入式(10)解得谐振过程时间Tr。且越大,Tr越小,Td也相应缩短。
因此,可根据Io调整Td,使开关管实现宽范围的软开关,称为自动死区技术。图11所示为自动死区任务流程。输出电流采样与ADC通道9相连接,读取AdcResult9寄存器值即可获取当前负载情况。将前臂死区时间计数值Tlead与滞后臂死区时间计数值Tlag分别赋值给ePWM1、ePWM2模块的死区发生器上升沿延时寄存器DBRED和下降沿延时寄存器DBFED,即可实现超前臂、滞后臂的死区时间自动调节。
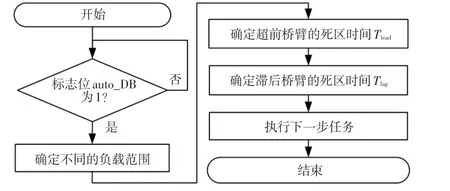
图11 自动死区任务流程
4.3 数字PWM的实现机理
移相PWM信号产生机理如图12所示,片载模拟比较器将变压器初级电流与斜率补偿峰值电流基准相比较,比较器输出至PWM发生器。设ePWM1模块运行在增减计数模式,其他PWM模块运行在递增计数模式。
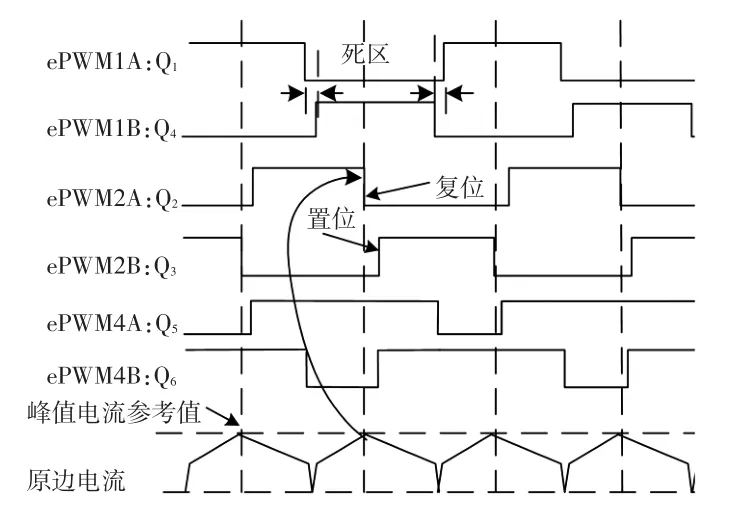
图12 数字PWM的实现机理
进入中断后即检测ePWM1模块时基控制寄存器TBCTL的计数模式:当检测到TBCTL为递增模式时,ePWM2A强制复位,ePWM2B经自动死区时间后置位;TBCTL为递减模式时,ePWM2B强制复位,ePWM2A经自动死区时间后置位。如此交替工作,实现ePWM2模块相对ePWM1模块的移相控制。
SR管Q5(Q6)的驱动信号由超前桥臂Q4(Q1)和滞后桥臂Q2(Q3)的驱动信号取“或”逻辑得到,这样负载电流流过SR管沟道的时间占比最高,总体的导通损耗最小。
5 数字式PSFB DC/DC变换器硬件设计
5.1 驱动电路设计
Q5和Q6的栅极接于输出电压GND端,因此以GND为参考驱动电路。选取驱动芯片为高速双MOS管驱动器UCC27324,可向容性负载提供大的峰值电流,同步整流驱动电路如图13所示。UCC27324在MOS管开关转换期间在Miller平坦区域提供最大4 A电流。变压器原边全桥开关管也通过UCC27324驱动,但须提供变压器隔离。
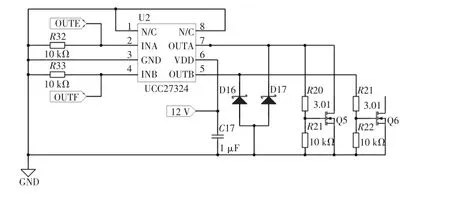
图13 同步整流驱动电路原理
5.2 采样电路设计
ip通过电流互感器后经电阻采样得到电压信号,送入AD采样端口。电流互感器选用匝比为1∶100的PE63587。图14所示为变压器初级电流采样电路。
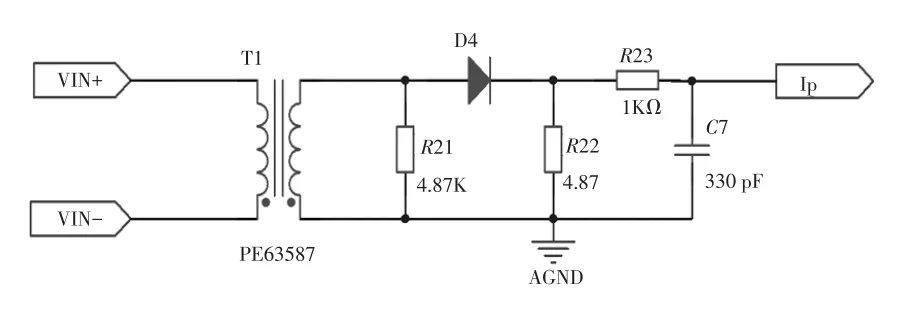
图14 变压器初级电流采样电路
图15所示为输出电压采样电路,电压传感器选用LEM公司的LV25-P。其传感器原边电流额定值为l0 mA。输出额定电压Vo=12 V,传感器原边串联2个1 kΩ、6 W的限流电阻时,传感器原边电流In1=6 mA,转换到传感器副边电流In2=15 mA。控制器A/D检测范围为0~3.3 V,采样电阻R3=3 V/15 mA=200 Ω。后级电路接放大倍数为1的电压跟踪器,运算放大芯片采用OP27GS。12 V的输出电压经过直流电阻分压以及电压跟踪器,最终得到2.472 V的AD采样输入值。
6 试验验证
根据车载充电电源的设计需要,搭建了PSFB DC/DC变换器试验平台,主要参数如表1所示。变压器原边H桥开关管采用英飞凌型号为SPP20N60CFD的MOSFET模块,SR管采用仙童半导体公司型号为FDP032N08的MOSFET模块。
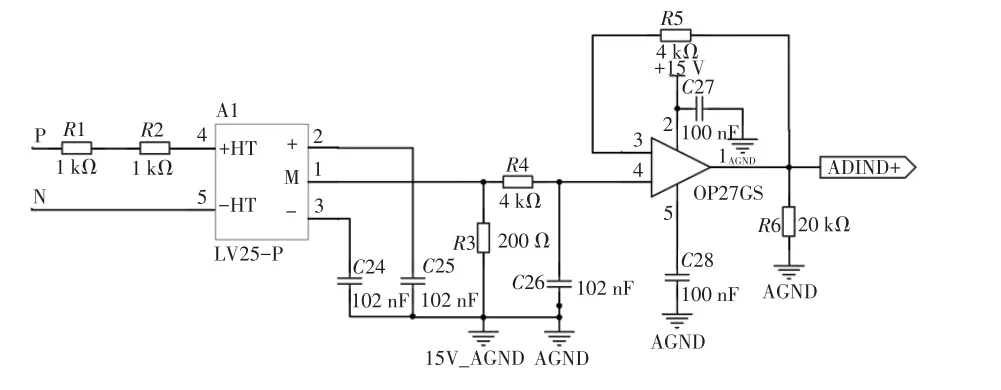
图15 输出电压采样电路

表1 DC/DC变换器的设计参数
如图16所示,试验平台包括示波器、PSFB DC/DC变换器、辅助电源和晶闸管整流器。负载采用2 Ω、5 kW的滑动变阻器。首先,打开辅助电源,为变换器的隔离驱动、DSP以及采样系统供电。然后,用CCS软件将程序复制到DSP中,经过调试后,用晶闸管整流器给变换器提供300~500 V的直流输入。
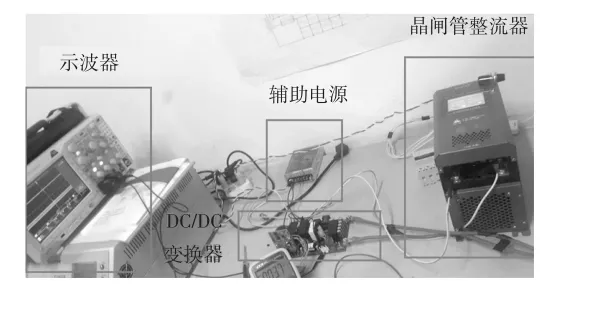
图16 PSFB DC/DC变换器试验平台
图17所示为轻载时死区时间Td调整前、后滞后臂Q3的漏源极电压VDS以及驱动电压VGS波形。在死区时间为1 μs时,滞后臂Q3实现零电压开通困难,如图17a所示;当死区时间增大到2 μs时,开关管可以较好地实现零电压开关,如图17b所示。结果表明,加入自动死区技术后实现了宽范围的软开关。

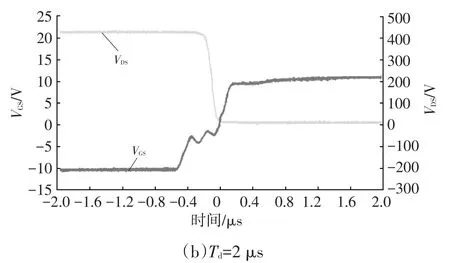
图17 轻载时Td调节前、后滞后臂Q3软开关波形
在额定输入电压Vin=400 V的情况下,图18a所示为负载从0突变到80%时输出电压Vo和输出电流Io的波形,图18b所示为负载从80%突变到0时输出电压Vo和输出电流Io的波形。从图18分析可知,对于负载内80%的阶跃变化,可实现输出峰值偏差小于额定输出的3%,而稳定时间在240 μs左右,具有良好的动态性能和抗干扰能力。
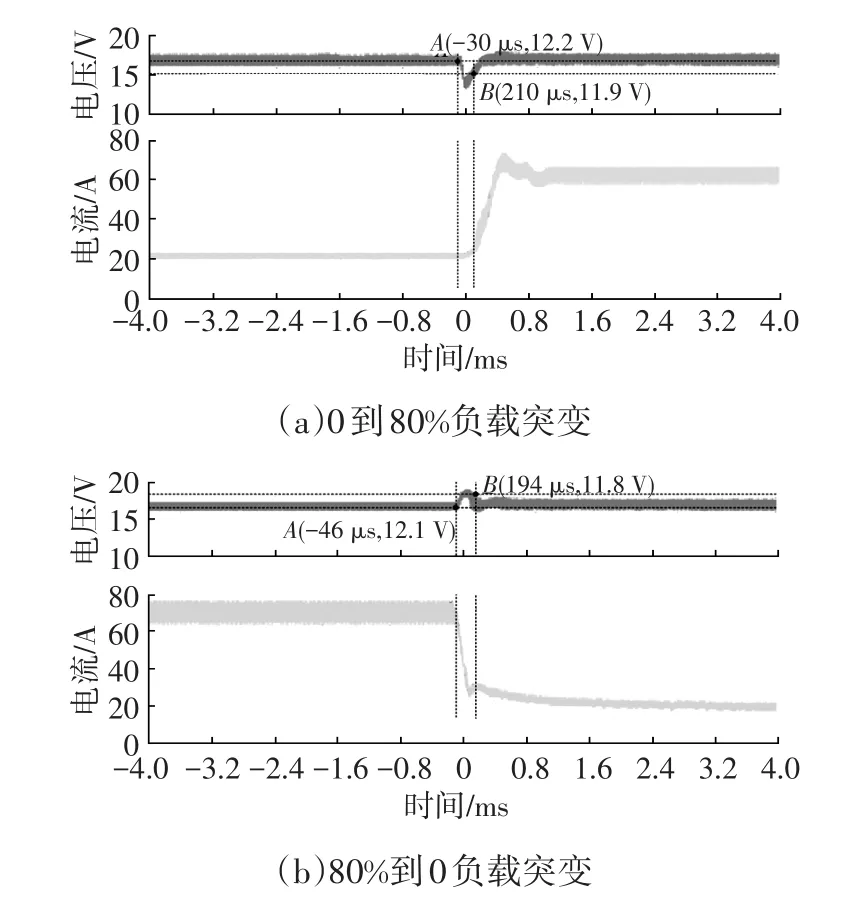
图18 负载突变时输出电压与输出电流波形
不同输入电压下负载与效率的关系如图19所示,变换器在最大输入电压500 V、额定电压400 V和最低输入电压300 V时,在10%~100%负载范围内,系统效率均在95%以上,可实现很宽的负载电流输出范围,且受输入电压变化影响很小,满足车载充电电源的充电要求。
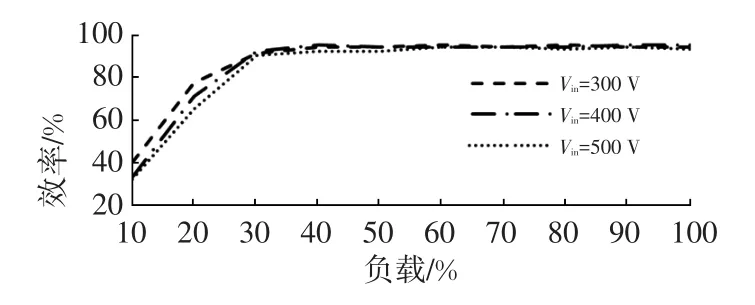
图19 不同输入电压下负载与效率的关系
7 结束语
本文针对电动汽车车载充电电源的核心部分DC/DC变换器存在的问题,设计了新的PSFB DC/DC变换器控制系统,采用数字峰值电流模式控制,引入了斜坡补偿,消除了次谐波振荡。提出自动死区控制技术,实现了宽范围的软开关,降低了开关损耗,提高了电源效率。试验表明,在10%~100%负载范围内,系统效率均在95%以上。采用基于TMS320F28027的数字移相控制,实现了对于负载内80%的阶跃变化,输出峰值偏差小于额定输出的3%,而稳定时间小于240 μs,提高了控制系统的动态响应速度和抗干扰能力。
